
IGRIP开放性实验平台设计与开发
2018-01-03 05:44张文倩熊佳玮陈思雨樊树海
实验技术与管理 2017年12期
张文倩, 熊佳玮, 陈思雨, 樊树海
(1. 南京工业大学 工业工程系, 江苏 南京 210009; 2. 麻省理工学院 信息质量项目“数据质量与信息安全”实验室, 美国 马萨诸塞州 02139)
虚拟仿真技术探索与实践
IGRIP开放性实验平台设计与开发
张文倩1,2, 熊佳玮1, 陈思雨1, 樊树海1,2
(1. 南京工业大学 工业工程系, 江苏 南京 210009; 2. 麻省理工学院 信息质量项目“数据质量与信息安全”实验室, 美国 马萨诸塞州 02139)
为解决虚拟仿真实验平台不能在线仿真和远程控制的问题,进行了IGRIP开放性实验平台的设计与开发。对IGRIP和外部模块进行信息交换的3种接口方式进行了比较和分析,在工厂生产案例中进行了实际功能的应用实验,有效提高了其应用范围,简化了操作流程,增强了应用过程的便利性和操作性,让学生在仿真实验设计和操作过程中深入理解专业知识,以提高研究效率与教学效果,激发学生的学习兴趣和创新意识。
虚拟仿真; 实验平台; 软件二次开发; IGRIP
虚拟仿真教学可以辅助传统教学,将其应用到科研与教学中可以有效提高研究效率与教学效果,培养学生科学思维及创新能力。因此,虚拟仿真实验教学是实验教学改革的重要内容和必然趋势[1-3]。
随着科学技术的发展和工业自动化、机械化程度的提高,虚拟仿真实验平台已有许多成熟的人机工程仿真软件,如CATIA、JACK、IGRIP等。这些仿真软件具有图形仿真和离线编程功能,但没有直接在线仿真和远程控制功能,需要利用其附带的开放式编程接口和仿真环境定制接口,进行二次开发以拓展软件的应用范围、提高其仿真应用过程的便利性和操作性[4-6]。笔者针对IGRIP系统实验平台的开放性进行设计和二次开发。
1 IGRIP实验平台系统分析
IGRIP是一种大型商用数字制造软件,利用内部模型库快速建模、建立运动关系,并对动态过程进行运动学仿真和分析。IGRIP动态仿真过程包括离散和连续两种类型,两者同时进行。离散过程由GSL语言控制,通过设备执行GSL指令实现;而连续过程由设备结合模型的状态参数,调用C语言编写的动态链接库中的函数来实现[7-8]。
图形仿真语言GSL是图形模拟的编程语言,内置于系统中,控制工作单元中某一或某群机器人设备行为,有自己的数据类型、结构和语法。
命令行解释器CLI是仿真环境交互的命令语言,用来加载工作单元、设备、部件和路径以及运行仿真等。
从整体上看,IGRIP系统发送的指令是由离散点组成的。但是在执行每一个离散点指令时,其执行过程是连续的。在执行某一个离散点指令进入连续控制过程时,依据模型的当前状态设置初始参数,根据目标点进行逆运动求解得到规划值进行仿真,返回调用点准备执行下一个离散点指令,开始新的连续控制过程。动态仿真流程如图1所示:

图1 仿真流程图
2 IGRIP开放性方案设计
IGRIP系统的开放性总体设计分为3层模块,如图2所示。
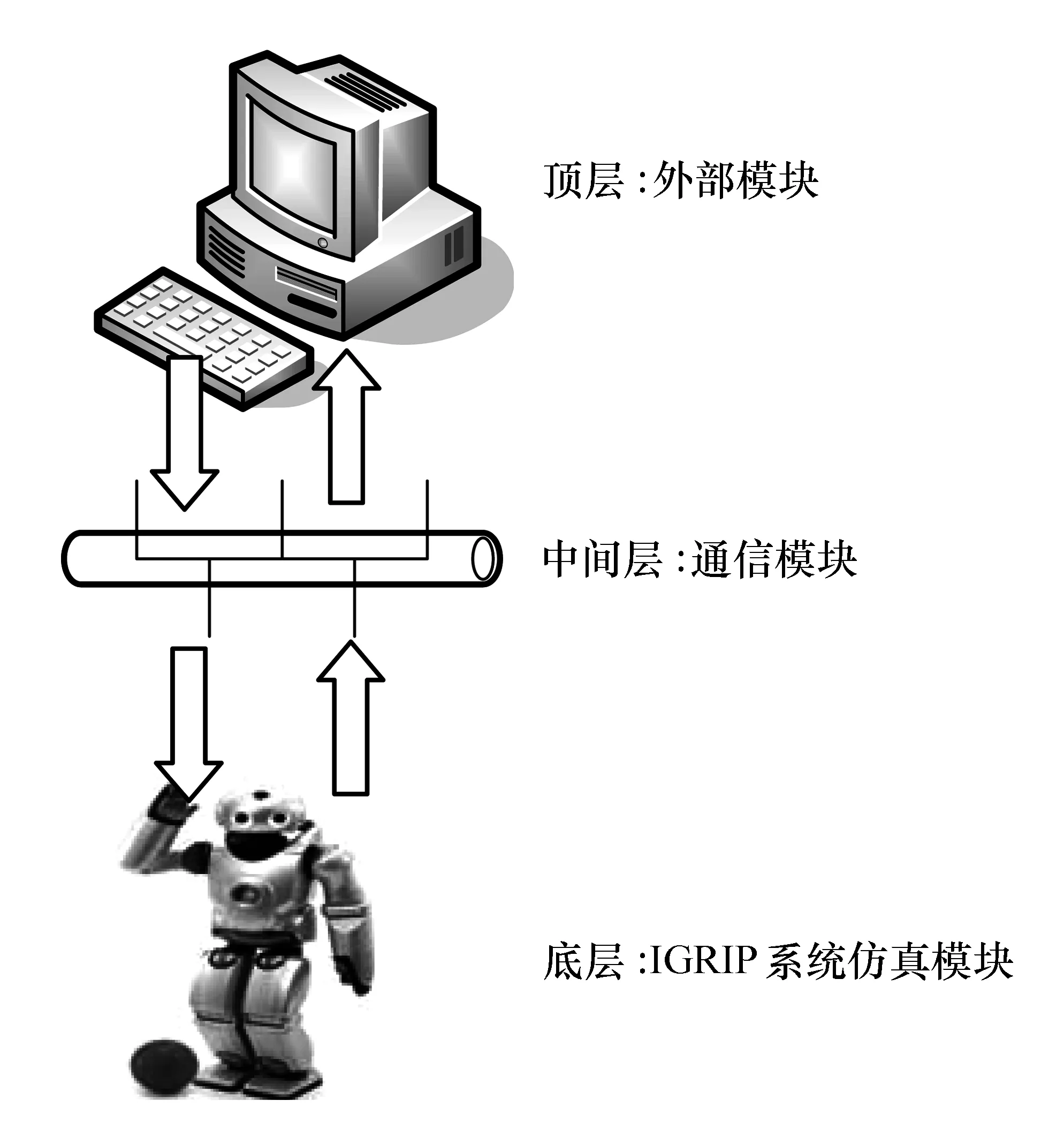
图2 IGRIP开放性系统结构图
IGRIP系统开放性设计的重点在于中间层模块,即IGRIP系统和外部之间的信息交流方式的设计。IGRIP系统与外部程序进行通信的方法和接口有3种方式[9-10],如表1所示。

表1 IGRIP访问外部程序的实现方式
3 IGRIP的开放性开发
根据IGRIP软件访问外部程序的3种实现方式,以Windows系统为基础,结合IGRIP系统进行开发。
3.1 离线交互系统开发
由于IGRIP的开放性将选用文件方式,直接通过打开文件进行仿真。以打开文件File为例,具体指令如下:
PROGRAM File
VAR file:STRING
-------- Main Declaration Section
BEGIN MAIN
OPEN FILE ′D:DenebSyslibPROGRAMSworkerModel.gsl′ FOR TEXT INPUT AS 1
while( READ_LINE( #1, file) <> $EOF ) do
write(file, cr)
endwhile
------- END MAIN-------
END File
3.2 在线交互系统的开发
实验者和IGRIP系统通过套接字方式创建双向通信线路,在客户端和服务器之间传递命令、进行在线交互,使操作者了解仿真过程中各种情况[10-13]。在装有TCP/IP协议的客户端,以网页形式作为客户端输入界面,通过登录机器人仿真主页,输入CLI命令并将其传到IGRIP所在计算机上,确保仿真机器人的实时性和交互性,达到了在线进行快速、准确传输数据信息的目的。
(1) 建立套接口,指令如下:
OPEN SOCKET′robot1:D:DenebEXAMPLESPROGRAMS ob_socket′ FOR UPDATE AS 2
OPEN CLIENT ′user:2017′ FOR UPDATE AS 2
OPEN SERVER 2017 FOR UPDATE AS 2
CLOSE #2
套接字通信的流程如图3所示。

图3 套接字通信流程示意图
(2)启动IGRIP仿真环境,指令如下:
Igrip-s<2017>
retrieve workcell ′IW′
IW=′robot1′
load program ′Model.gsl′ into IW
activate IW
通过以上步骤方可以在线控制机器人模型。
4 IGRIP的开放性仿真实验
结合上节的方式,对一家汽车制造企业生产过程中员工在焊接时上下料的搬运作业,在IGRIP实验平台上进行仿真,仿真图如图4所示。
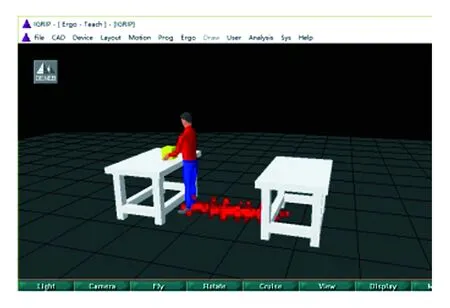
图4 实验仿真图
在仿真环境中,工人通过手工搬运把上下料所需要的材料物品从桌子搬运至工作台。首先建立工人人体模型、工作环境、工作路径和一系列工人搬运过程的姿态等。工人将从起始点走向桌子,然后抓取物品并举起搬至工作台,放置于工作台,再返回结束点,至此流程结束。
GSL输入指令为:
OPEN FILE′D:DenebSyslibPROGRAMSworkerModel.gsl′FOR TEXT INPUT AS 1
反馈窗口反馈“The model will work”提示。其GSL程序如下:
PROGRAM Model
VAR path1,path2:PATH
------- Main Declaration Section
#INCLUDE anthro
BEGIN MAIN
open window ′model_window′ @ 0.5, 0.5:8 as 1
write @1,( ′the model will work′, cr )
UNITS =INCH
$SPEED_MODE = PERCENT
$SPEED =1
MOVE ALONG ′path1′
WRITE(′It took′,$cycle_time,′seconds to move along path1′,cr)
$CYCLE_TIME=0
MOVE ALONG ′path2′
------- END MAIN-------
END Model
仿真的能耗结果如表2所示,其中第三阶段抬举物品的平均能耗最大,为17.290 8 kJ·min-1,第四阶段物品送至工作台次之,为15.452 4 kJ·min-1,但它所占总能量消耗最大为41%。在仿真结果的基础上针对消耗较大阶段,学生可以进行专业角度的改善来优化整体生产流程。
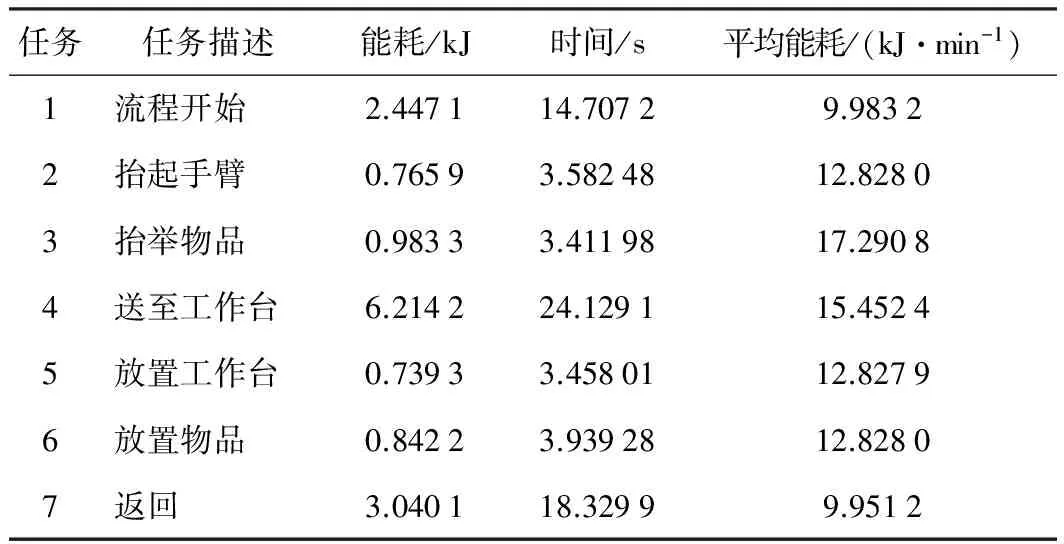
表2 能耗分析结果整合表
5 结语
本文基于IGRIP仿真软件实验平台,对其与外部系统进行信息交换的3种接口支持方式进行了比较,从离线和在线两种方式进行了开放性设计和开发,使之能高效进行信息交流,并在汽车制造公司的生产流程进行具体案例实验,最终使IGRIP在虚拟仿真中充分发挥优势,提高了其应用范围、简化了仿真操作流程、增强了应用过程的便利性和操作性。
虚拟仿真实验平台可以让学生在进行仿真实验设计和操作过程中,获得直接感性认识,深入理解专业知识,更好地巩固课堂上所学的知识,充分运用所学内容来解决实际问题,提高了研究效率与教学效果。
References)
[1] 黄银娣,卞荣花,张骏.国内外物流系统仿真软件的应用研究[J].工业工程与管理,2010,15(3):124-128.
[2] 吴宁,胡欣,吴遵秋,等.基于虚拟仿真平台引入综合性设计性实验项目[J].实验技术与管理,2017,34(4):6-8.
[3] 孙彦景,陈岩,王艳芬,等.基于WARP的无线通信实验研究平台设计[J].实验技术与管理,2017,34(4):74-77.
[4] 王红伟.基于IGRIP仿真的弧焊机器人实时控制研究[D].上海:上海交通大学,2005.
[5] 樊树海,肖田元,乔桂秀.基于DENEB-QUEST质量仿真系统设计与实现[J].系统仿真学报,2002(5):607-608,616.
[6] 黄婷华,樊树海,段赛赛,等.采用Flexsim/Minitab的大规模定制质量仿真系统的设计与开发[J].现代制造工程,2014(2):6-9.
[7] Shikdar A, Al-Araimi S, Omurtag B. Development of a software package for ergonomic assessment of manufacturing industry[J].Computers & Industrial Engineering,2002,43(3):485-493.
[8] Hunter S L. Ergonomic evaluation of manufacturing system designs[J].Journal of Manufacturing Systems,2001,20(6):429-444.
[9] Garg A,Chaffin D B,Herrin G D.Prediction of metabolic rates for manual materials handling jobs[J].American Industrial Hygiene Association Quarterly,1978,39(8):661-674.
[10] 樊树海,Amanda Elizabeth,蒋南云,等.实验课创新激励平台开放式成绩评分系统研究与开发[J].实验技术与管理,2011,28(5):23-26.
[11] 陈文杰,陈善本.弧焊机器人工作单元Internet远程控制系统[J].上海交通大学学报,2005,39(7):1042-1045.
[12] 蒋敏,单家芳,孔军.基于Socket的多平台通讯研究[J].计算机工程与应用,2005,41(36):135-137.
[13] 樊树海,Amanda Elizabeth,倪卫红,等.工业工程实验室经济型VR/3D改造方案探究[J].实验室研究与探索,2011,30(8):210-212,235.
Design and development of IGRIP open experimental platform
Zhang Wenqian1,2, Xiong Jiawei1, Chen Siyu1, Fan Shuhai1,2
(1. Department of Industrial Engineering, Nanjing University of Technology, Nanjing 210009, China; 2. Information Quality Program”Data Quality and Information Security”Laboratory, Massachusetts Institute of Technology, Massachusetts 02139, USA)
In order to solve the problem that the online simulation and remote control for the virtual simulation experimental platform can’t be carried out, the IGRIP open experimental platform is designed and developed. The three interface modes of the information exchange between IGRIP and the external module are compared and analyzed. In the case of the actual factory production, the application experiment on the specific functions is carried out, which effectively increases its application scope, simplifies the operation process, and improves the convenience and operability of the application process. In the process of designing and operating the simulation experiment, students can get a deep understanding of professional knowledge so as to improve the research efficiency and teaching effect, and stimulate students’ interest in learning and their innovative awareness.
virtual simulation; experimental platform; software secondary development; IGRIP
10.16791/j.cnki.sjg.2017.12.027
2017-05-11
国家自然科学基金项目(71671089,71171110,71371097);江苏省研究生实践创新计划项目(SJCX17-0300)
张文倩(1994—),女,河南开封,硕士研究生,主要研究方向为工业工程
樊树海(1975—),男,江苏南京,博士,教授,主要研究方向为质量控制、仿真与虚拟制造.
TP391.9;G642.423
A
1002-4956(2017)12-0114-03
猜你喜欢
环球时报(2021-04-07)2021-04-07
语数外学习·高中版中旬(2021年12期)2021-03-09
甘肃教育(2020年6期)2020-09-11
今日农业(2019年12期)2019-08-13
测控技术(2018年5期)2018-12-09
电信科学(2016年10期)2016-11-23
科技传播(2015年20期)2015-03-25
环球人文地理(2014年11期)2014-11-22
中国卫生(2014年9期)2014-11-12
西安航空学院学报(2014年5期)2014-07-13
