
隧道磁电阻效应磁场测量方法研究
2018-01-03 05:44杨文荣杨晓锐
实验技术与管理 2017年12期
杨文荣, 郭 兵, 杨晓锐, 赵 琳
(河北工业大学 电气工程学院, 天津 300130)
实验技术与方法
隧道磁电阻效应磁场测量方法研究
杨文荣, 郭 兵, 杨晓锐, 赵 琳
(河北工业大学 电气工程学院, 天津 300130)
提出了一种采用三轴隧道磁电阻传感器作为测量探头,双轴定向、单轴独立测量的三维磁场测量方法。测量时转动测量探头,使两定向轴输出电压均为零,此时独立测量轴与磁场方向一致,实现独立轴直接测量总磁场。利用曲线拟合,获得了测量探头的输出电压与磁感应强度在一定范围内的线性函数关系。通电螺线管中心轴线上磁感应强度测量实验结果表明,采用该方法的测量系统,测量±0.3 T范围内的磁场,最大相对误差为-4.3%,精确度高于0.3%。
隧道磁电阻传感器;三维磁场测量;曲线拟合;螺线管
隧道磁电阻(tunneling magnetoresistance,TMR)效应是自旋电子学研究的核心重点内容[1-2],相比于霍尔效应、各向异性磁电阻效应、巨磁电阻效应,其具有的磁性隧道结(magnetic tunnel junction,MTJ),在室温条件下具有更高的磁电阻比[3]。TMR磁传感器相比于其他磁性传感元件,具备优异的温度稳定性、极高的灵敏度、高分辨率等特点,可用于磁场测量[4]。磁传感器测量三维空间内磁感应强度的有效值是一个关于磁场方向与磁敏感轴之间夹角的余弦函数[5-6],因此磁场测量时必须考虑磁传感器的位置带来的误差,这就使得由单一磁传感器构成的测量探头无法满足高精度测量系统的需求。同时,三轴磁传感器直接用于测量磁场时,存在3个磁敏感轴相互干扰的问题,因此目前三维磁场测量系统,大多数都采用多个独立磁传感器协同测量的方法,共同完成磁场测量[7];但由于多个独立磁传感器的相对位置很难保证绝对垂直,以及通过矢量合成的方法,测量多个分量后,合成总磁感应强度时会增加系统误差,影响系统测量精确度。
因此,本文提出了一种双轴定向、单轴独立测量的三维磁场测量方法,以TMR传感器作为测量探头。三轴TMR磁传感器相当于将3个相互垂直的磁传感器集成到一起,不仅能有效地保证垂直的位置关系,而且TMR磁传感器整体的体积小,与传统多个磁传感器相比,三轴TMR磁传感器能够更好地测量磁场中某点的磁感应强度。与传统三维磁场测量方法不同,独立定向磁场测量方法,按照定向轴的测量值均为零的原则,依靠转动测量探头的方式,实现独立测量轴直接测量总磁感应强度。首先,双定向轴方向上,磁感应强度分量为零,解决了测量时三轴磁传感器3个磁敏感轴之间相互干扰的问题。其次,独立测量轴与磁场方向一致,避免了测量磁感应强度分量之后再矢量求和,这一过程引入误差,提高了测量精确度。
1 隧道磁电阻效应与磁传感器输出原理
1.1 隧道磁电阻效应
如图1所示,磁性膜/非磁性膜/磁性膜类型的磁隧道结(magnetic tunnel junction, MTJ)包括由铁磁性物质构成的自由层(free layer)、由非磁性金属氧化物组成的绝缘层(barrier layer)以及由抗铁磁性(antiferromagnet)、铁磁性物质两者共同组成的钉扎层(pinned layer)。2个电极位于MTJ的顶部和底部,外接电源驱动电子穿越MTJ,形成电流回路。根据电子自旋相关的隧穿效应,外接电源一定,当自由层、钉扎层两层的磁矩同向相互平行时,大量的电子穿越MTJ,此时MTJ呈现低阻态;当自由层、钉扎层两层的磁矩反向相互平行时,少量的电子穿越MTJ,此时MTJ呈现高阻态[3]。由于非磁性膜的存在,解决了磁性多层膜中存在较强的层间交换耦合的问题,电子可以隧穿极薄的非磁性膜而保持其自旋方向不变,使微弱的磁场变化就可导致其磁电阻发生极大的变化,这就是隧道磁电阻(TMR)效应,因此TMR磁传感器具有极高的灵敏度,可用于磁场测量[4]。
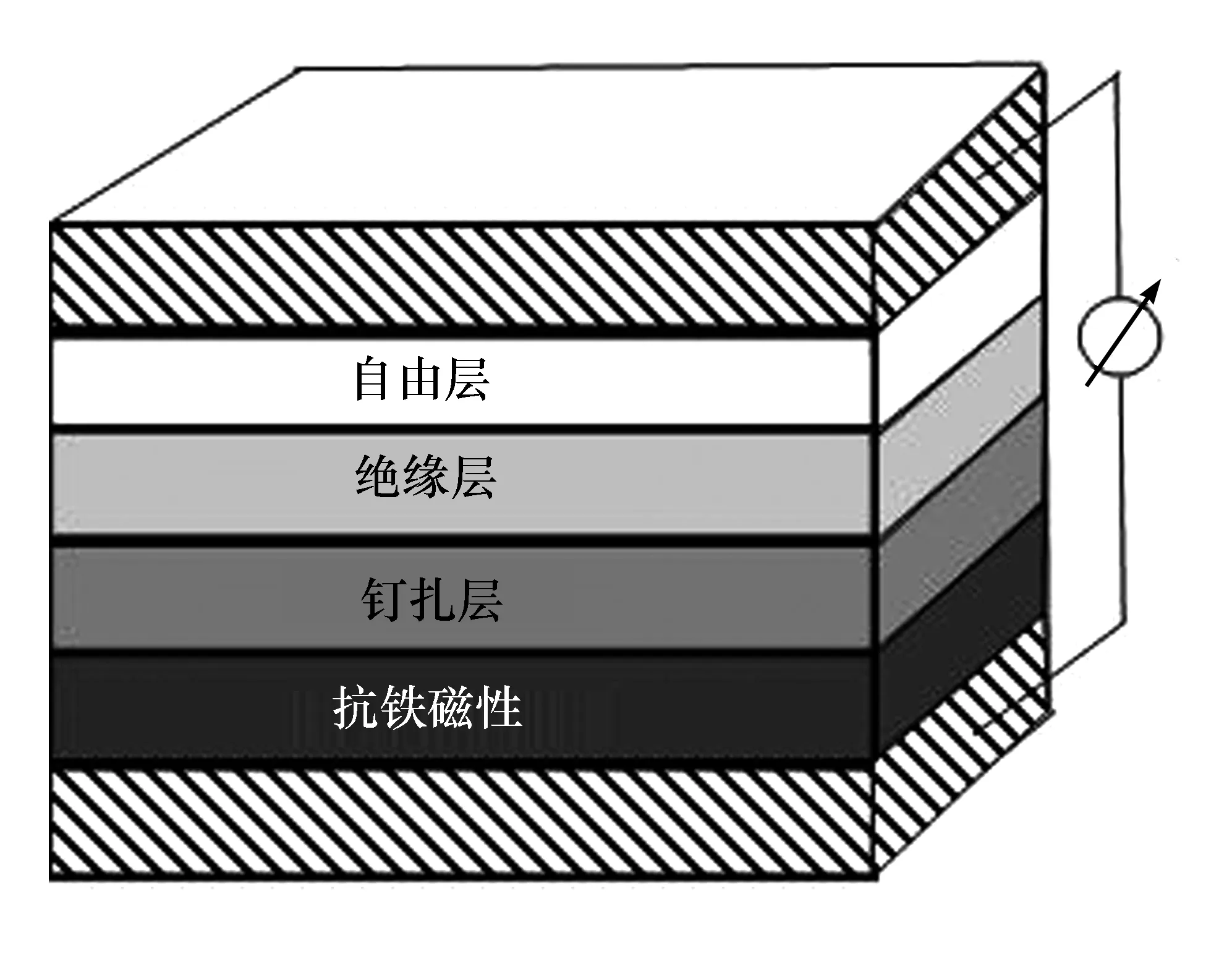
图1 磁隧道结示意图
1.2 TMR磁传感器的输出原理
三轴TMR磁传感器集成了3个磁敏感方向相互垂直的TMR单元。每个TMR单元均采用推挽式惠斯通全桥结构,提供差分电压输出,如图2所示,其4个桥臂上的电阻分别为R1、R2、R3、R4为相同的TMR电阻[8]。

图2 推挽式惠斯通全桥结构
图中V1为供电电源电压,箭头表示TMR电阻的磁敏感方向。V+、V-分别为R1和R2构成的半桥、R3和R4构成的半桥的输出电压,可作为一个全桥输出。由于4个TMR电阻具有相同温度特性,故全桥结构本身具有很高的温度稳定性,不需要设计复杂的温度补偿电路、就能抑制温漂。4个TMR电阻处于相同的空间中,故全桥结构能够抑制和消除空间中存在诸多干扰噪声。半桥的输出电压V+、V-和全桥输出U分别为[9]

(1)
(2)
(3)
2 独立定向磁场测量原理
如图3所示,以三轴TMR磁传感器的中心点为原点O,Z轴为独立测量轴,X、Y轴为两定向轴。总磁场感应强度B与三轴的夹角分别为Ψ、θ、β,在三轴上的分量分别为Bi、BD1、BD2,且有
(4)

图3 TMR测量探头三轴与磁场的位置关系示意图
测量三维磁场时,三轴磁传感器存在三磁敏感轴之间相互干扰的问题,导致测量结果存在较大误差,但当磁敏感轴向的磁场分量较小时,此时全桥输出U不存在干扰问题。因此,提出了双轴定向、单轴独立测量磁场的方法。定向轴1、2分别输出2个全桥测量信号U1、U2。当两定向轴上磁感应强度分量为零时,β、θ均为90o,半桥输出V+、V-大小相等,此时全桥输出U1、U2均为零,独立测量轴测量总磁感应强度,有cosΨ=1。测量空间内任意未知磁场时,根据两定向轴的磁场测量值,在磁场中调整TMR测量探头的位置,使得定向轴上输出为零[10]。
单轴独立测量总磁感应强度B,即磁感线与独立测量轴的磁敏感轴平行,全桥输出为U,根据TMR效应有
U=f(B)=a0+a1B
(5)
式中,f(B)为校正函数,a0为零位输出,a1为传感器探头的灵敏度。
3 测量系统的总体设计
3.1 总体结构
该系统主要由TMR磁传感器、恒压源、ADS1256数模转换器、STM32微控处理器以及串口输出电路组成,如图4所示。恒压源驱动TMR磁传感器作为测量探头,其输出3个相互垂直方向上的测量电信号,经滤波处理后进入ASD1256数模转换器,完成模拟量到数字量的转换;STM32微控处理器对ADS1256输出信号进行算法修正及计算,然后将通过RS232串口,将实时测量结果发送到主机,以便进行后续处理。

图4 总体结构框图
3.2 硬件电路
3.2.1 低通滤波电路
TMR磁传感器采用惠斯通全桥提供差分电压输出,抵消了环境温度等外界条件对测量的影响,但是测量系统从传感器拾取的信号中,还是包含多种噪声及工频干扰信号,从而影响测量精度。为了提高测量系统的精度和稳定性,设了如图5所示的压控电压源型二阶滤波电路,该电路是截止频率为15.9 Hz的低通滤波电路,可以滤除待测电信号意外的干扰噪声和工频干扰信号,从而提高测量系统的各项性能。

图5 压控电压源型二阶滤波电路
3.2.2 ADS1256多路采集电路
为了满足精度和分辨率的设计要求,采用适用于科学仪器的Σ-Δ型24位高精度A/D转换器ADS1256。该转换器由模拟多路开关(MUX)、可编程增益放大器(PGA)、四阶Σ-Δ调制器、可编程数字滤波器、串行外部接口SPI等部分组成。ADS1256数据输出速率最高可达30 kS/s、无噪声精度最高可达23位、非线性特性低至0.0010%,能够实现高速、高精度数据采集。ADS1256提供9路模拟输入端,通过模拟多路开关可将其配置为4路差动输入。TMR测量探头的 3路差分输出电信号,依次接入将输入端AIN0~AIN5,AINCOM端空置[11]。
4 算法修正与校正实验
4.1 算法修正
为了减少系统误差对测量精度的影响,对TMR测量探头的输出电压进行算法修正。与传统传感器依靠电桥、手动调节电位器进行修正不同,算法修正具有操作简单、便于实现的特点。测量系统开始测量之前,首先将探头放置在零磁场的调零腔中,同时测得50组独立测量轴和两定向轴的输出电压值,然后求得各轴输出电压的平均值C、C1、C2,作为相应轴的零状态修正值。测量磁场时,在A/D转换器的输出电压值上减去相应的修正值,就可以实现调零的目的[12]。
4.2 校正实验及系统的各项参数
依据亥姆霍兹线圈可以产生磁感应强度大小可调的均匀磁场这一原理,设计了校正实验磁场发生装置,如图6所示。该发生装置由2个彼此平行且共轴的载流圆线圈以及两线圈之间的探头支架构成。由亥姆霍兹线圈原理可知,当两线圈间距等于线圈半径时,两线圈产生的总磁场在轴中点附近的较大范围内是均匀的,每个线圈匝数为2 000匝,线圈的内半径为7.5 cm;支架可将高斯计的标准探头和待校正的TMR测量探头精确的固定在轴中点且保证标准探头的Z轴以及TMR测量探头的双定向轴垂直于两线圈中心轴,独立测量轴与两线圈中心轴向一致。

图6 校正实验磁场发生装置
利用F.W.BELL8030高斯计,配合使用精度为0.25%的标准三维探头ZOA83—3208-10-T,对±0.3 T(±300 Gs)磁场范围内的60个点进行校正。进行了5组回程实验,测定该系统的回程误差δ=0.20%,重复性E=0.07%。
图7为数据处理结果及校正函数曲线,对5组回程实验的测量结果进行处理,计算出60个校正点中每个校正点在回程实验的2个过程中输出电压的2个平均值UBU、UBD。利用曲线拟合方法确定磁感应强度B与输出电压U之间的关系函数如公式6所示,相关系数为0.998,传感器探头的灵敏度为6×104mV/T(6.000 mV/Gs)。
U=f(B)=36.295+6.000B
(6)

图7 数据处理结果及校正函数曲线
5 测量实验及结果分析
设计制作了长度L为1 000 mm、直径D为145.6 mm、线圈匝数为1180匝的精密绕制的螺线管。恒流源输出电流为I,真空中的磁导率μ0=4π×10-7H/m。通电螺线管中心轴线上磁感应强的计算公式[13]为

(7)
当螺线管中通入的电流I在-10 A~10 A范围内变化时,应用该系统测量螺线管中心轴线处的磁感应强度并与计算值的对比,实验结果见表1。表中I为通入螺线管中的电流;U1、U2为两定向轴输出电压;U为独立测量轴输出电压,并依据公式(6),可得通电螺线管中心轴线处磁感应强度的测量值。
6 结语
依据本文提出的采用两轴定向、单轴独立测量的磁场测量方法搭建的测量系统,在±0.3T(±300 Gs)范围内分辨率可达1×10-6T(0.01 Gs),精确度高于0.3%,最大相对误差为-4.3%,可实现高精度测量磁场的目的。不仅解决了多个磁敏感轴之间相互干扰的问题,而且将独立定向磁场测量方法应用到三维空间磁场测量。相对于传统的通过矢量合成总磁感应强度,单轴独立测量磁场减小了系统误差。

表1 磁感应强度B的测量值与计算值对比

表1(续)
References)
[1] Muenks M, Jacobson P, Ternes M, et al. Correlation-driven transport asymmetries through coupled spins in a tunnel junction[J/OL]. (2017-08).[2017-06-02].http://doi.org.10.1038/ncomms14119.
[2] Zhao W, Zhao X, Zhang B, et al. Failure Analysis in Magnetic Tunnel Junction Nanopillar with Interfacial Perpendicular Magnetic Anisotropy[J]. Materials, 2016, 9(1):41.
[3] 韩秀峰, 刘厚方, 张佳,等. 新型磁性隧道结材料及其隧穿磁电阻效应[J]. 中国材料进展, 2013, 32(6):339-353.
[4] 吕华, 刘明峰, 曹江伟,等. 隧道磁电阻(TMR)磁传感器的特性与应用[J]. 磁性材料及器件, 2012, 43(3):1-4,15.
[5] Mano A, Atiwongsangthong N, Titiroongruang W. Improvement of Independent Directional Magnetic Field Measurement Technique with Hall Sensors[J]. Advanced Materials Research, 2013, 811:347-352.
[6] 邢红宏, 张勇. 霍尔效应磁场测量仪器的改进[J]. 实验技术与管理, 2016, 33(5):78-81.
[7] 谭穗妍, 翁嘉文. 高精度三维弱磁场测量仪[J]. 实验技术与管理, 2014, 31(11):107-110.
[8] 黎琦, 刘明峰, 白建民,等. 基于隧道磁电阻(TMR)效应的齿轮传感器设计与性能[J]. 磁性材料及器件, 2014, 45(5):22-26.
[9] 倪敏, 许美新, 时晨. 新型磁电阻效应实验仪研制及应用[J]. 实验技术与管理, 2012, 29(5):76-79.
[10] 曾育锋, 游艳琳, 何金灵. 自制磁通门传感器测量弱磁场[J]. 实验室研究与探索, 2011, 30(6):48-51.
[11] 王晨辉, 吴悦, 杨凯,等. 基于STM32的多通道数据采集系统设计[J]. 电子技术应用, 2016, 42(1):51-53.
[12] 吴艳霞, 胡国庆, 马武刚,等. 高精度倾斜仪的自动调零设计[J]. 大地测量与地球动力学, 2010, 30(6):154-156.
[13] 向茜, 王世庆, 李自成,等. 带电螺线管磁场的数值研究[J]. 大学物理, 2016, 35(10):29-34.
Study on magnetic field measurement method of tunneling magnetoresistance effect
Yang Wenrong, Guo Bing, Yang Xiaorui, Zhao Lin
(School of Electrical Engineering, Hebei University of Technology, Tianjin 300130, China)
A 3D magnetic field measurement method with the double-axle orientation and single-axle independent measurement is proposed by using the tribal-axle tunnel magnetoresistance sensor as the measuring probe. During the measurement, the measuring probe is rotated so that the output voltage of the double directional axle is zero, and the independent measuring axle is in accordance with the direction of the magnetic field to realize the direct measurement of the total magnetic field by the independent axle. The linear relationship between the output voltage of the probe and the magnetic induction intensity in a certain range is obtained by using the curve fitting. The experimental results of the magnetic induction intensity measurement on the central axle of the electric solenoid show that by using this method to measure the magnetic field in the range of ±0.3 Ts, the maximum relative error is -4.3%, and the accuracy is higher than 0.3%.
tunneling magnetoresistance sensor; 3D magnetic field measurement; curve fitting; solenoid
2017-06-06修改日期2017-09-05
河北省自然科学基金项目(E2015202241);2017年河北省级研究生创新资助项目(220056)
杨文荣(1969—),女,河北沧州,博士,教授,博士生导师,研究方向为工程电磁场、磁性液体特性及应用.
E-mail:wryang@hebut.edu.cn
10.16791/j.cnki.sjg.2017.12.008
O4-33
A
1002-4956(2017)12-0031-05
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
传感器世界(2022年6期)2022-11-25
长春师范大学学报(2018年8期)2018-08-17
小学生导刊(2017年13期)2017-06-15
电测与仪表(2016年4期)2016-04-11
铁道科学与工程学报(2015年4期)2015-12-24
电测与仪表(2015年23期)2015-04-15
电子设计工程(2015年3期)2015-02-27
食品工业科技(2014年7期)2014-03-11
物理与工程(2013年3期)2013-03-11
