
基于二阶滑模控制的双馈风机低电压穿越研究
2018-01-02 09:10张夏丽张琨张磊
电网与清洁能源 2017年8期
张夏丽,张琨,张磊
(河北工业大学控制科学与工程学院,天津 300131)
并网风电装机容量逐年增加,大规模风电接入对电网安全稳定运行的影响不容忽视。越来越多的电力系统运营商实现了风机并网必须遵守的电网标准[1-3],电网标准覆盖很多方面,如电压工作范围,功率因数变化,频率变化范围,电网支持能力和低电压穿越能力。其中,在风机设计和制造技术上,低电压穿越能力是公认的最大挑战,低电压穿越要求风机在电网电压跌落时仍保持与电网相连。
双馈电机与大规模功率转换器的风机相比,双馈风机有很多优势,如逆变器和输出滤波器的成本较低[4],能以经济有效的方式提供变速范围和独立的有功无功控制[5]等,其被广泛应用于并网系统中。然而,双馈电机的定子直接与无穷大电网相连,且其励磁变流器控制能力有限[6],双馈发电系统对电网的扰动,尤其是电压跌落非常敏感[7-9]。当电网电压发生跌落时,DFIG会出现严重的电磁暂态过程,导致转子过流和直流母线电压泵升。
经验证,使用经典的定子磁链定向矢量控制(proportional integral,PI控制器)可以很好地满足电网标准[10-13]。但是,这种控制在电压大幅度跌落时很容易出现饱和,且对电机参数和其他扰动如非建模动态非常敏感。文献[14-15]基于双馈电机暂态过渡过程分析,产生与定子暂态直流分量和负序分量相反的转子磁链,从而“主动消磁”,抑制转子侧过电流。但是该策略需要分离并提取定子磁链暂态分量和负序分量。文献[16]给出了转子负序电流指令,并设计了包含负序控制系统的双馈电机控制策略。文献[17]将定子磁链作为前馈量,控制转子磁链跟踪定子磁链,从而减少转子过流,并抑制电磁转矩振荡,但是上述方案受到变流器容量的限制,只有在使用超大变流器来适应转子过电压且对转子电流实现完全控制的前提下才能实现。
针对双馈电机对电压跌落敏感的问题,基于二阶滑模控制原理和Super-twisting算法,在不附加任何硬件装置的前提下,考虑电网扰动和最大风能捕获,设计了双馈电机的二阶滑模控制器,减少转子过电压/过电流,并始终保持对双馈电机的控制,扩大DFIG安全运行范围,从而避免Crowbar的使用或激活。最后,对1.5 MW风机在电压跌落的条件下进行仿真研制所提出控制器的低电压穿越性能。
1 风机建模
图1为双馈风力发电机组并网的基本结构。

图1 风机并网架构Fig.1 Wind turbine connecting to the grid global scheme
1.1 风力机模型
根据空气动力学知识,风机捕获的气动功率Pa表示为[18]

式中:ρ为空气密度;R为风轮半径;v为风速;功率因数Cp表示风能和机械能的转换效率,与叶尖速比λ和桨距角β有关。叶尖速比为

式中,ωr为风轮转速。
功率系数CP(λ,β)可表示为
式中,C1=0.517 6,C2=116,C3=0.4,C4=5,C5=21,C6=0.006 8。系数C1~C6的取值与具体风机叶片的形状以及它所处的环境空气动力性能有关。假设风机运行在额定风速以下,此时变桨机构不动作,即β=0。因此,当λ=8.123时,Cp(λ)取得最优值,Cp(λ)=0.48。
将式(2)代入式(1),可得:

根据气动功率与风轮转速的关系,气动转矩Ta可表示为

本文主要研究风力发电系统电气部分的动态特性,因此采用风机传动系统的简化模型——单质量块模型,如图2所示。

式中:Tg为转子侧发电机转矩,N·m;Jt为风力机总惯量;Kt为风力机总阻尼。

图2 风力发电传动系统单质量块模型Fig.2 One-mass model of a wind turbine
1.2 双馈电机模型
在同步旋转d-q坐标系下,电机动力学模型描述如下:
电压方程

磁链方程

电磁转矩方程

转子运动方程

式中:V为电压;I为电流;R为电阻;L为电感;M为互感;ωs为同步角速度;Tem为电磁转矩;p为极对数。
由式(8)、(9)、(10)、(11)可得双馈电机为5阶非线性动态模型,为了简化并解耦,将d轴与定子磁链的方向对齐,且d-q坐标系以定子磁链矢量的速度旋转,并忽略定子电阻,即φsq=0,φsd=φs,Rs=0。从而得到
2 二阶滑模控制器设计
本文的控制目标是控制转子电压/电流,提高能源效率,减少机械应力,并增强低电压穿越能力。通过二阶滑模控制方法设计的控制器在电网电压正常和故障情况下均能对系统进行控制,不需要控制策略的切换,因此需要保证最大风能追踪,即能够同时实现很好的低电压穿越性能和最优转矩Topt跟踪效果,且能有效削弱抖振现象。
本节所提出的基于二阶滑模控制的双馈风力发电机的控制结构,如图3所示。为了有效地从风能中捕获机械功率且保持风机安全运行,风机低电压穿越的控制问题可描述为控制电磁转矩Tem和转子侧电流Ir,使得双馈电机在电网故障的情况下,可以跟踪最优电磁转矩Topt,使输出功率最优。

图3 双馈电机二阶滑模控制结构Fig.3 Control structure of the DFIG second-order sliding model

即得到参考电磁转矩Tref=Topt。
定子的无功功率表述如下:

为了实现解耦控制,将d轴与定子磁链向量对齐,则式(14)可转化为

令定子的无功功率Qs为0,得

则可以得到参考转子电流

设跟踪误差为

控制目标是使其跟踪误差式(18)为0。因此,本文以跟踪误差(18)为基础设计二阶滑模面。
对式(18)求导,并将式(12)代入得

定义G1和G2函数如下:
因此,我们得到

为了克服传统滑模控制的抖振问题,自然的修正方法是在不连续点的邻域内,通过一个平滑的近似代替不连续函数。然而,平滑近似有时很难找到,这也是很多常用的方法都选择电流作为参考值的原因,因此,高阶滑模控制得到了更为广泛的应用。
信息量的增加是高阶滑模控制算法实现中的主要问题,即需要大量的信息才能设计任意n阶控制器,而Super-twisting算法仅需滑模面的值[19]。由式(17)可知,满足Super-twisting算法的应用条件——系统相对阶为1,因此,采用该算法针对双馈电机设计二阶滑模控制器:

式中,y1和y2是中间变量,代表误差的积分。
为了保证滑动流行在有限时间内收敛,增益B1、B2、B3和B4应满足如下条件[20]:
则肯定存在有限时间tTem和tIrd,使得跟踪误差(17)为0,即满足

因此,所设计的二阶滑模控制器在有限时间内可达标,即实现了控制目标。
3 系统仿真
利用Matlab/Simulink对1.5 MW双馈风力发电系统进行仿真。双馈风电机组参数如表1所示。
控制器的参数取值通过仿真获得B1=8,B2=500,B3=15,B4=2×105。风轮转速的初始状态值ωr(0)=14.06 r/min,发电机转速的初始状态值ωg(0)=1 462.58 r/min。
选择额定风速以下工况对所设计的二阶滑模控制器进行仿真验证,并与传统矢量控制策略对比分析。采用基于接近风场的实际风速模型进行模拟,图4为平均输出风速10 m/s,湍流强度10%的风速曲线。

表1 双馈风电机组参数Tab.1 The parameters of the double-fed wind turbine

图4 平均风速为10 m/s曲线Fig.4 Curve at an average wind speed of 10 m/s
图6-图13给出了当t=0.5 s时机端电压跌落到20%,且跌落持续0.1 s(如图5)时的仿真结果,设转子电流最大值不超过2 pu,保护直流母线电压不超过1.1 pu[9]。图6-图13分别对应传统矢量和二阶滑模控制下的转子电流曲线、直流母线电压曲线、无功功率曲线和电磁转矩曲线。
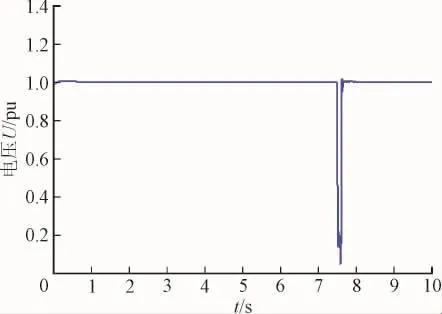
图5 机端电压跌落曲线Fig.5 Generator voltage sag

图6 传统矢量控制下转子电流曲线Fig.6 Rotor current under the traditional vector controller
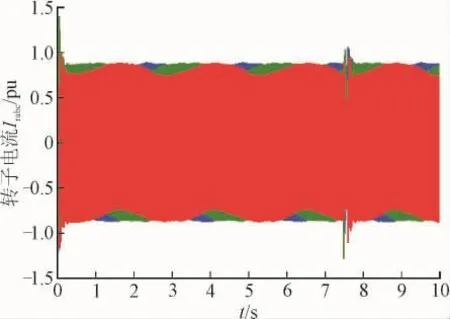
图7 二阶滑模控制下转子电流曲线Fig.7 Rotor current under the second-order mode controller
对比图6和图7可以看出,电网故障时刻传统矢量控制下转子电流峰值为3 pu,而所设计的二阶滑模控制下转子电流峰值为1.3 pu,满足上述转子电流峰值标准,且二阶滑模控制下转子电流的振荡幅度较传统矢量控制更小。

图8 传统矢量控制下直流母线电压曲线Fig.8 DC bus voltage under the traditional vector controller
对比图8和图9可以看出,电网故障时刻,传统矢量控制下直流母线电压峰值为1.2 pu,振荡幅度为0.2 pu,超过了上述母线电压的最大值标准,而所设计的二阶滑模控制下直流母线电压峰值为1.06 pu,且振荡幅度较小,仅为0.06 pu.
图11所示无功功率波形,相比于图10所示无功功率波形,在电压故障及恢复时刻,其趋近稳态的速度明显加快,振荡幅度明显缩小,二阶滑模控制器的应用使双馈电机快速达到稳态,减小了电网故障引起的对无穷大电网的冲击。

图9 二阶滑模控制下直流母线电压曲线Fig.9 DC bus voltage under the second-order mode controller

图10 传统矢量控制下无功功率曲线Fig.10 Reactive power under the traditional vector controller
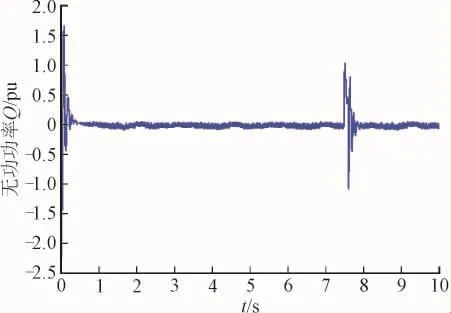
图11 二阶滑模控制下无功功率曲线Fig.11 Reactive power under the second-order mode controller
对比图12和13可以看出,电网故障时刻传统矢量控制下电磁转矩振荡幅度最大值为1.8 pu,二阶滑模控制下电磁转矩振荡幅度最大值为1.5 pu,较传统滑模控制而言,电磁转矩振荡幅度小,且逐渐趋于稳定,没有过大的电磁转矩,二阶滑模控制策略的引入有效地减弱了电网电压跌落时DFIG对电网的冲击。
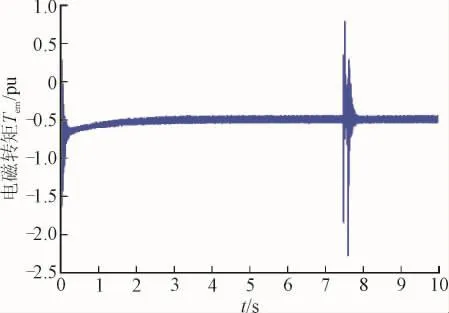
图12 传统矢量控制下电磁转矩曲线Fig.12 Electromagnetic torque under the traditional vector controller

图13 二阶滑模控制下电磁转矩曲线Fig.13 Electromagnetic torque under the second-order mode controller
4 结论
为了减小电网电压跌落时双馈电机对电网的冲击,基于二阶滑模控制理论设计了控制器,应用于双馈电机的低电压穿越控制。基于二阶滑模控制的低电压穿越策略已经在电网电压跌落的条件下对1.5 MW三叶风机进行了仿真分析,并与传统矢量控制进行对比验证,结果表明,该控制策略可以有效地抑制电网故障时刻转子侧产生过大电流,并对直流母线电压有较好的控制效果,电磁转矩的振荡幅度也相应得到了减弱,值得注意的是所设计的二阶滑模控制器不需要为提高低电压穿越的能力对风电机组附加任何装置。
[1]赵宏博,汤海雁,张文亮,等.双馈风电机组零电压穿越暂态特性分析及综合控制策略[J].电网技术,2016,40(5):1422-1430.ZHAO Hongbo,TANG Haiyan,ZHANG Wenliang,et al.Transientcharacteristicsresearchandintegratedcontrolstrategy of DFIG for zero voltage ride through[J].Power System Technology,2016,40(5):1422-1430(in Chinese).
[2]艾斯卡尔,朱永利.风力发电机组故障穿越问题综述[J].电力系统保护与控制,2013,41(19):148-153.AISIKAER,ZHU Yongli.Summarizing for fault ride through characteristics of wind turbines[J].Power System Protection&Control,2013,41(19):148-153(in Chinese).
[3]XUE Y,TAI N.Review of contribution to frequency control through variable speed wind turbine[J].Renewable Energy,2011,36(6):1671-1677.
[4]LISERRE M,CARDENAS R,MOLINAS M,et al.Overview of multi-MW wind turbines and wind parks[J].IEEE Transactions on Industrial Electronics,2011,58(4):1081-1095.
[5]JOU S T,LEE S B,PARK Y B,et al.Direct power control of a DFIG in wind turbines to improve dynamic responses[J].Journal of Power Electronics,2009,9(5):43-47.
[6]年珩,程鹏,贺益康.故障电网下双馈风电系统运行技术研究综述[J].中国电机工程学报,2015,35(16):4184-4197.NIAN Heng,CHENG Peng,HE Yikang.Review on operation techniques for DFIG-based wind energy conversion systems under network faults[J].Proceedings of the CSEE,2015,35(16):4184-4197(in Chinese).
[7]LOPEZ J,SANCHIS P,ROBOAM X,et al.Dynamic behavior of the doubly fed induction generator during three-phase voltage dips[J].IEEE Transactions on Energy Conversion,2007,22(3):709-717.
[8]SEMAN S,NIIRANEN J,ARKKIO A.Ride-through analysis of doubly fed induction wind-power generator under unsymmetrical network disturbance[J].IEEE Transactions on Power Systems,2006,21(4):1782-1789.
[9]王艾萌,郗文远.基于滑模控制器的双馈风电机组低电压穿越控制策略[J].电机与控制应用,2016(3):54-58.WANGAimeng,XIWenyuan.ASMC-basedlowvoltageridethrough capability enhancement for DFIG wind turbines[J].Electric Machines&Control Application,2016(3):54-58(in Chinese).
[10]YANG L,XU Z,OSTERGAARD J,et al.Advanced control strategy of DFIG wind turbines for power system fault ride through[J].IEEE Transactions on Power Systems,2012,27(2):713-722.
[11]ABDELLI R,REKIOUA D,REKIOUA T,et al.Improved direct torque control of an induction generator used in a wind conversion system connected to the grid[J].Isa Transactions,2013,52(4):525-538.
[12]KHEZAMI N,BRAIEK N B,GUILLAUD X.Wind turbine power tracking using an improved multimodel qu adratic approach[J].Isa Transactions,2010,49(3):326-334.
[13]LEON A E,MAURICIO J M,SOLSONA J A.Fault ridethrough enhancement of DFIG-based wind generation considering unbalanced and distorted conditions[J].IEEE Transactions on Energy Conversion,2012,27(3):775-783.
[14]XIANG D,RAN L,TAVNER P J,et al.Control of a doubly fed induction generator in a wind turbine during grid fault ride-through[J].IEEE Transactions on Energy Conversion,2006,21(3):652-662.
[15]向大为,杨顺昌,冉立.电网对称故障时双馈感应发电机不脱网运行的系统仿真研究[J].中国电机工程学报,2006,26(10):130-135.XIANG Dawei,YANG Shunchang,RAN Li.System simulation of a doubly fed induction generator ride-through control for symmetrical grid fault[J].Proceedings of the Csee,2006,26(10):130-135(in Chinese).
[16]王大伟,孙超.不平衡电压下双馈变速风电机组的控制策略[J].电网与清洁能源,2011,27(11):72-77.WANG Dawei,SUN Chao.Control strategy of the DFIG-based wind power system under unbalanced grid voltage conditions[J].Power System&Clean Energy,2011,27(11):72-77(in Chinese).
[17]XIAO S,YANG G,ZHOU H,et al.An LVRT control strategy based on flux linkage tracking for DFIG-based WECS[J].IEEE Transactions on Industrial Electronics,2013,60(7):2820-2832.
[18]BENBOUZID M,BELTRAN B,AMIRAT Y,et al.Second-order sliding mode control for DFIG-based wind turbines fault ride-through capability enhancement[J].Isa Transactions,2014,53(3):827-833.
[19]范金锁,张合新,王桂明,等.一种高阶滑模控制算法的改进及应用[J].控制与决策,2011,26(9):1436-1440.FAN Jinsuo,ZHANG Hexin,WANG Guiming,et al.Improvement of higher order sliding mode control and its application[J].Control&Decision,2011,26(9):1436-1440(in Chinese).
[20]皇甫宜耿,王毅,赵冬冬,等.一种鲁棒高阶滑模Super-Twisting算法的全桥逆变器[J].西北工业大学学报,2015,33(2):315-319.HUANGFU Yigeng,WANG Yi,ZHAO Dongdong,et al.A super-twisting algorithm of robust high order sliding mode control for full-bridge inverter[J].Journal of Northwestern Polytechnical University,2015,33(2):315-319(in Chinese).
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
应用数学(2020年2期)2020-06-24
数学物理学报(2018年6期)2019-01-28
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
电子制作(2017年1期)2017-05-17
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年9期)2015-04-09
大电机技术(2015年5期)2015-02-27
