
高速公路关联施工区可变限速协调控制方法*
2018-01-02 10:10张存保路洪彬
武汉理工大学学报(交通科学与工程版) 2017年6期
张存保 江 周 李 薇 路洪彬 张 珊
(武汉理工大学智能交通系统研究中心1) 武汉 430063) (云南省交通规划设计研究院2) 昆明 650041)(武汉光谷智能交通科技有限公司3) 武汉 430079)
高速公路关联施工区可变限速协调控制方法*
张存保1)江 周1)李 薇2)路洪彬3)张 珊1)
(武汉理工大学智能交通系统研究中心1)武汉 430063) (云南省交通规划设计研究院2)昆明 650041)(武汉光谷智能交通科技有限公司3)武汉 430079)
为改善高速公路施工区交通拥堵问题,分析了高速公路关联施工区进行可变限速协调控制的必要性,确定了施工区关联度的量化计算模型,提出了关联施工区可变限速协调控制流程,运用模型预测控制方法,建立了关联施工区可变限速协调控制方法和模型.针对一条包含两个施工区的高速公路施工路段进行了仿真实验.结果表明,与固定限速相比,施工区单独控制方式下路段平均车速、车辆总行驶距离分别提高了8.5%和9.7%,而施工区协调控制方式下路段平均车速、车辆总行驶距离则分别提高了15.2%和17.3%.
交通工程;可变限速控制;关联施工区;模型预测控制;高速公路;交通控制
0 引 言
限速管理是保障高速公路施工区安全、高效通行的重要手段.戴彤宇等[1]将高速公路作业区各种道路交通信息进行量化处理,在此基础上提出了基于驾驶员信息处理能力的高速公路作业区限速值计算方法和模型.于仁杰等[2]对高速公路施工区多种限速方案下的交通运行状态进行了仿真研究,并对施工警告区和上游过渡区的限速值降幅与交通安全性关系进行了对比分析.孟祥海等[3]分析了高速公路不同类型施工区的车速分布规律,并根据车速分布特征确定了施工作业区各区段限速值建议.
上述文献中,高速公路施工区采用的是固定限速方法,不能根据施工区交通运行状况进行动态调整.为克服固定限速方法的局限性,可变限速控制技术逐步发展起来并得到推广应用.Lu等[4]综合运用可变限速控制和入口匝道控制技术,实现高速公路瓶颈路段交通流量最大化,从而提高整条道路的通行效率.Carlson等[5]分析了可变限速控制对瓶颈路段交通流的影响,建立了高速公路瓶颈路段可变限速控制模型.李志斌等[6]阐述了瓶颈路段通行能力下降现象与通行效率的关系,针对不同类型瓶颈提出了相应的可变限速控制策略.Hadiuzzaman等[7]研究表明,可变限速控制可缓解瓶颈路段交通拥堵程度并缩短拥堵消散时间.Yang等[8]提出了高速公路施工区理想减速曲线,并以实际车速与理想车速之间差异最小为优化目标,建立了施工区可变限速优化控制方法和模型.杨庆芳等[9]采用阶梯限速控制方法对高速公路主线交通流进行控制,有效提高了瓶颈路段的通行效率.Lu等[10]对可变限速控制方法、模型和应用情况进行了系统地总结,并对后续研究中需要关注的问题和方向进行了展望.
综上所述,可变限速控制技术可有效改善高速公路施工区的交通运行状态.但现有研究主要针对单个施工区,对同一路段存在多个施工区的情况涉及较少,对施工区之间的相互影响以及可变限速控制问题缺乏深入研究.为此,文中首先对施工区之间的关联性及可变限速协调控制的必要性进行分析,确定关联施工区可变限速协调控制的基本思路,然后,运用模型预测控制技术,建立高速公路关联施工区可变限速协调控制方法和模型,并通过仿真实验进行测试和验证.
1 施工区可变限速协调控制需求及关联性分析
1.1 关联施工区可变限速协调控制的必要性
对于单个施工区,其可变限速控制的原理是通过动态改变施工区上游路段的限速值,调节驶入施工区的车流量,使得施工区交通流量维持在其通行能力附近,从而实现整个路段的通行效率最大化,见图1.
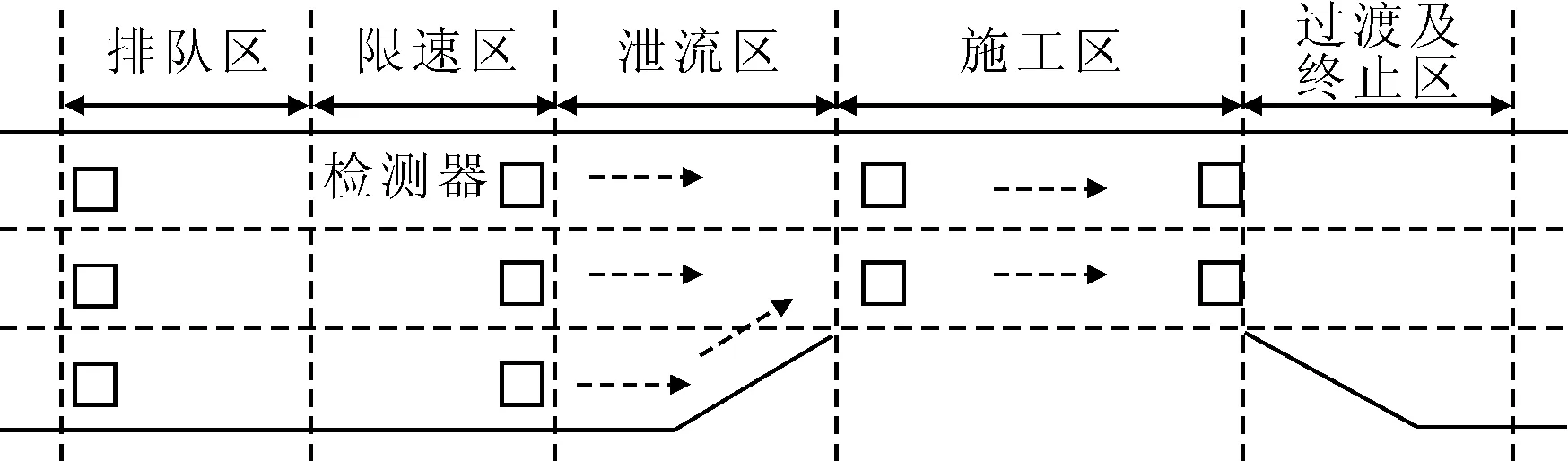
图1 单个施工区可变限速控制方法示意图
对于间距较小的关联施工区,在实施可变限速控制时需要协同考虑,以实现整条高速公路通行效率最大化.
1.2 施工区关联度分析
施工区关联度评价的核心是分析施工区之间交通流的相互影响程度,见图2.
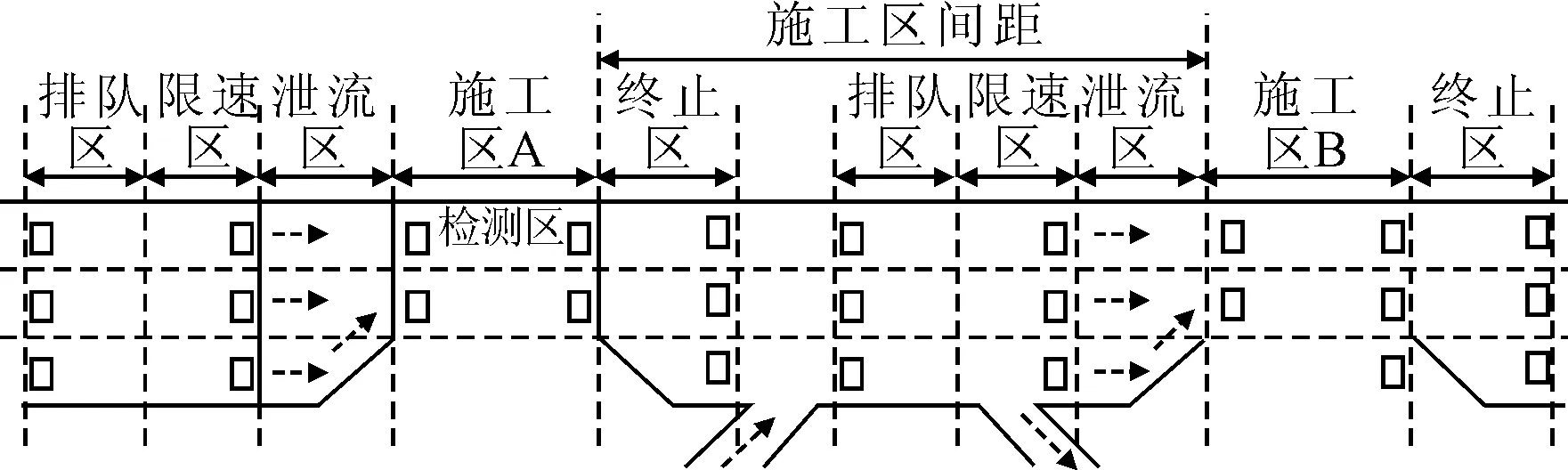
图2 相邻施工区可变限速控制方法示意图
对于两个相邻施工区,若要独立实施可变限速控制,则施工区之间的间距S为
S>Lw+Lqueue+Lcrit+Lds
(1)
式中:Lw为上游施工区驶出车流达到稳定行驶状态所需的行驶距离,根据实际观测数据,可取为0.5 km;Lqueue为下游施工区的排队长度;Lcrit为下游施工区的限速区长度,可根据限速区车辆减速过程来确定,通常可取为1.0 km;Lds为下游施工区的泄流区长度.由于下游施工区排队长度为动态变化量,因此,需要根据下游施工区实时排队长度,确定相邻施工区的关联度.
定义相邻施工区关联度r的计算公式为

(2)
对于相邻施工区是否实施可变限速协调控制,可采用如下判断规则:

(3)
2 高速公路关联施工区可变限速协调控制方法和模型
2.1 关联施工区可变限速协调控制流程
对于距离较近的相邻施工区,首先根据检测器采集的实时交通状态数据,计算相邻施工区的关联度.若关联度小于1.0,则各施工区独立控制;若关联度达到或超过1.0,则实施可变限速协调控制.施工区可变限速控制的流程见图3.

图3 高速公路关联施工区可变限速协调控制流程
2.2 高速公路关联施工区动态交通流模型
为准确描述高速公路交通流的动态传播过程,需要将高速公路划分成多个路段,每个路段长度通常为1至数公里,单个路段上限速值相同.高速公路路段划分示意图见图4.
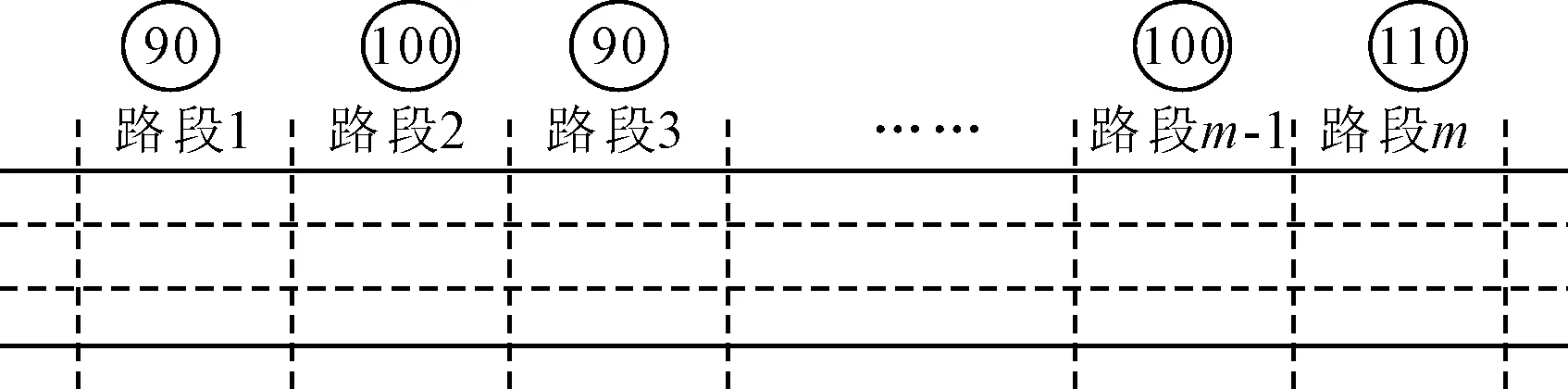
图4 高速公路路段划分示意图
高速公路动态交通流模型的表达式为
qm(k)=ρm(k)vm(k)
(4)
密度方程:
ρm(k+1)=ρm(k)+

(5)
速度方程:


(6)
路段m排队长度计算公式为
Dm(k+1)=Dm(k)+
(8)
式中:qm(k)为k时段内驶出路段m的交通流量;ρm(k)为k时段路段m的交通流密度;vm(k)为k时段路段m的平均速度;Lm为路段m的长度;ρcr,m为路段m的临界密度;ρjam为路段的拥挤密度;V(ρm(k))为k时段路段m的期望车速;vfree,m(k)为路段m的自由流速度;T0为时间步长(通常取10~20 s);τ为因前方交通流密度变化导致的滞后时间;η,κ,am为模型参数.
在可变限速控制条件下,施工区车速不仅受到路段交通流状态影响,也受到路段动态限速值的影响.因此,期望车速由式(7)改进为
V(ρm(k))=minvfree,m·
(9)
式中:VL,m(k)为k时段路段m的限速值;α为不遵守限速值的车辆比例.
2.3 高速公路关联施工区协调控制模型
对于关联度达到或超过1.0的关联施工区,需要将关联施工区及其前后路段作为一个整体,在前文中的动态交通流模型基础上,运用模型预测控制方法,对各种可变限速控制方案下关联施工区交通运行状态进行短时预测和评价,从而得到最佳的可变限速控制方案.
高速公路关联施工区可变限速控制的目标是提高整个施工区域的通行效率,可采用车辆总行驶距离TTD最大、总行驶时间TTT最小来表征.其目标函数为
J=αTTD·TTD-αTTT·TTT=
αTTTLmρm(k+j)]
(10)
式中:T0为时间步长;Np为控制周期内时间步长数(控制周期通常为5 min);M为路段总数;ρm(k+j)为k+j时段路段m的交通流密度;vm(k+j)为k+j时段路段m的平均速度;αTTD,αTTD为总行驶距离TTD和总行驶时间TTT权重系数.
可变限速控制模型的约束条件主要包括:
1) 最大车速约束 各路段可变限速值不得超过该路段的法定限速值V0,m,即
VL,m(k)≤V0,m
(11)
2) 相邻路段车速差约束 为保证交通流的平顺性和安全性,参照文献[11],相邻路段之间的车速差不能大于20 km/h,即
|VL,m(k)-VL,m+1(k)|≤20.0
(12)
3) 可变限速值波动幅度约束 为避免因限速值急剧变化给驾驶员行为和交通流稳定性带来的冲击,同一路段相邻控制周期内可变限速值波动幅度不能大于20 km/h,即
|VL,m(k)-VL,m(k+1)|≤20.0
(13)
4) 施工区排队长度约束 为避免施工区的排队堵塞上游出口、入口匝道,需要保证各施工区的排队长度小于其能容纳的最大排队长度(以排队不堵塞上游最近的出口或入口匝道为判别依据),即
Dm(k) (14) 图5 高速公路施工区布置图 选取武汉市绕城高速公路一段长约8 km的施工路段,该施工路段为单向3车道,共设有两个施工区,记为施工区A和施工区B.两个施工区均封闭最右侧1条车道,施工区之间的间距为2.1 km.两个施工区之间有一个入口匝道,与下游施工区B之间的距离为0.3 km.根据施工路段几何特征和可变限速标志的布设位置,将其划分为8个路段(可变限速标志布设在路段分界线处),见图5.正常路段的固定限速值为120 km/h,施工区(路段4和路段7)的固定限速值为80 km/h.依据式(2),上游施工区驶出车流达到稳定行驶状态所需的行驶距离Lw取为0.5 km,下游施工区的限速区长度Lcrit取为1.0 km,下游施工区的泄流区长度Lds近似为路段6的长度0.7 km,即使下游施工区排队长度Lqueue为0时,上述两个施工区的关联度已超过1.0,属于关联度较大的施工区. 利用Vissim软件开展高速公路施工区交通仿真实验.首先,根据实际道路形状和尺寸,在Vissim中构建道路网络模型;然后,以现场观测数据为基础,对Vissim仿真参数如期望车速、期望安全距离、驾驶员反应时间等进行标定和校正;在此基础上,编写高速公路关联施工区可变限速协调控制程序,并利用Vissim的COM接口实现路段限速值的动态调整;最后,设定仿真路段的交通流量,分别对固定限速控制、施工区独立可变限速控制、施工区可变限速协调控制三种方式开展仿真实验,并对实验结果进行分析. 针对选定的实验路段,分别采用固定限速控制、施工区独立控制、施工区协调控制三种方式进行交通控制,然后根据仿真结果对其控制效果进行评价和分析.三种控制方式下的路段平均车速、施工区排队长度的变化情况见图6. 图6 三种控制方式下排队长度变化情况 三种控制方式下路段平均速度、车辆总行驶距离和总行驶时间见表1. 从上述实验结果可知: 1) 可变限速控制可有效提高高速公路施工路段的通行效率.与固定限速相比,施工区单独控制方式下路段平均车速、车辆总行驶距离分别提高了8.5%和9.7%,而车辆总行驶时间降低了7.6%;施工区协调控制方式下路段平均车速、车辆总行驶距离分别提高了15.2%和17.3%,而车辆总行驶时间降低了14.5%,其控制效果明显优于单独控制方式.其主要原因在于,在施工区单独控制方式下,施工区A的交通流量维持在其最大通行能力附近,导致下游施工区B交通需求和排队长度显著增加,进而影响整条道路的通行效率.在施工区协调控制方式下,上游施工区A可根据下游施工区B的交通状态,主动降低其交通流量,使得施工区B的交通流量维持在其通行能力附近,实现整条道路的通行效率最大化. 表1 三种控制方式下路段平均速度、车辆总行驶距离和总行驶时间统计结果 2) 在车流排队方面,由于路段6的入口匝道靠近下游施工区,交织区的存在使得施工区B的通行能力小于施工区A,因而更容易形成排队现象.从图8可以看出,在固定限速方式下,施工区B的排队长度在部分时间内超过200 m,对入口匝道车流汇入影响较大;在施工区独立控制方式下,由于上游施工区A的交通流量接近其通行能力,高于固定限速控制方式下的交通流量,导致下游施工区B的排队长度在部分时段内甚至高于固定限速方式;在协调控制方式下,通过主动调节上游施工区A的流量,使得下游施工区B的排队长度较小或无车辆排队. 文中分析了高速公路关联施工区进行可变限速协调控制的必要性,确定了施工区关联度的计算模型,并提出了关联施工区可变限速协调控制流程.在现有动态交通流模型METANET基础上,以整条道路通行效率最大为优化目标,建立了高速公路关联施工区可变限速协调控制方法和模型.仿真实验结果表明,与固定限速相比,施工区单独控制方式下路段平均车速、车辆总行驶距离分别提高了8.5%和9.7%,而施工区协调控制方式下路段平均车速、车辆总行驶距离则分别提高了15.2%和17.3%.可见,对于关联度较大的施工区,文中提出的可变限速协调控制方法可有效提高施工路段的通行效率,其控制效果优于施工区单独控制方式. [1] 戴彤宇,裴玉龙,陈瑜.基于驾驶员信息处理能力的高速公路作业区限速值计算方法[J].公路交通科技,2007,24(9):127-131. [2] 于仁杰,马荣国,王俊凌,等.高速公路施工区层级限速问题研究[J].中国公路学报,2013,26(6):150-156. [3] 孟祥海,王浩,徐汉青.高速公路施工作业区车速分布特征及限速控制研究[J].交通运输系统工程与信息,2013,2(13):149-152. [4] LU X Y, VARAIYA P, HOROWITZ R, et al. Novel freeway traffic control with variable speed limit and coordinated ramp metering[J]. Transportation Research Record: Journal of the Transportation Research Board,2011(2):55-65. [5] CARLSON R C, PAPAMICHAIL I, PAPAGEORGIOU M, et al. Variable speed limits as a mainline metering device for freeways[C]. The 89th Annual Meeting of Transportation Research Board, Washington D C,USA,2010. [6] 李志斌,金茂菁,刘攀,等.提高高速公路通行效率的可变限速控制策略[J].吉林大学学报,2013,43(5):1204-1209. [7] HADIUZZAMAN M, QIU T, LU X Y. Variable speed limit control design for relieving congestion caused by active bottlenecks[J].Journal of Transportation Engineering,2013,139(4):358-370. [8] YANG X F, LU Y. Development of optimal variable speed limit control system for freeway work zone operations[C]. The 93rd Annual Meeting of Transportation Research Board, Washington D C,USA,2014. [9] 杨庆芳,马明辉,梁士栋.高速公路瓶颈区域可变限速阶梯控制方法研究[J].西南交通大学学报,2015,50(2):354-360. [10] LU X Y, SHLADOVER S E. Review of variable speed limits/advisories-theory, algorithms and practice[C]. The 93rd Annual Meeting of Transportation Research Board, Washington D C,USA,2014. [11] 中华人民共和国交通运输部.公路项目安全性评价规范:JTG B05-2015[S].北京:人民交通出版社,2016. Coordinated Control Method of Variable Speed Limits for Correlative Work Zones of Freeway ZHANGCunbao1)JIANGZhou1)LIWei2)LUHongbin3)ZHANGShan1) (IntelligentTransportSystemResearchCenter,WuhanUniversityofTechnology,Wuhan430063,China)1)(YunnanCommunicationPlanningandDesignInstitute,Kunming650041,China)2)(IntelligentTransportationTechnologyCorporationofWuhanOpticsValley,Wuhan430079,China)3) In order to alleviate the traffic congestion in freeway work zones, the necessity to implement coordinated control of variable speed limits for correlative freeway work zones was analyzed, the calculation model for correlation degree of related work zones was determined, and the coordinated control flow of variable speed limits for correlative work zones was proposed. Using the model predictive control method, the coordinated control method and model of variable speed limits for correlative work zones were established. A freeway section with two work zones was chosen to carry out the simulation experiment, and the results show that, comparing with the fixed speed limits, the average speed and the total travel distance increased by 8.5% and 9.7% respectively under independent control of work zones, while the results are 15.2% and 17.3% respectively under coordinated control of work zones. traffic engineering; variable speed limits; correlative work zones; model predictive control; freeway; traffic control U491.4 10.3963/j.issn.2095-3844.2017.06.003 2017-09-22 张存保 (1976—):男,博士,教授,主要研究领域为交通信息工程及控制、交通安全等 *国家自然科学基金项目(51578432)、武汉市青年科技晨光计划项目(2016070204010124)、云南省交通厅科技计划项目(2016A05)资助3 实验及结果分析
3.1 实验方案

3.2 实验结果及分析


4 结 束 语
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
自动化学报(2017年4期)2017-06-15
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
中国塑料(2015年3期)2015-11-27
空间控制技术与应用(2015年2期)2015-06-05
