
基于无线电干涉的室内定位跟踪方法*
2017-12-29 06:15齐望东赵跃新陈隆亮黄明周
网络安全与数据管理 2017年24期
徐 兵,齐望东,赵跃新,陈隆亮,黄明周,威 力
(中国人民解放军陆军工程大学 指挥信息系统学院,江苏 南京 210007)
基于无线电干涉的室内定位跟踪方法*
徐 兵,齐望东,赵跃新,陈隆亮,黄明周,威 力
(中国人民解放军陆军工程大学 指挥信息系统学院,江苏 南京210007)
无线电干涉定位系统(RadioInterferometricPositioningSystem,RIPS)是一种新型高精度测相定位系统,但RIPS在室内环境受多径效应影响无法进行有效定位。首先揭示了由多径引起的RIPS相位观测误差具有空间多样性特征,服从“类高斯”统计分布,然后提出基于无线电干涉的室内定位跟踪方法RIT(RadioInterferometricTracking)。不同于传统RIPS,RIT利多径相位误差的统计分布特性对运动速度进行估计,以此来完成室内目标的有效定位和跟踪。基于USRPN210软件无线电平台构建了原型系统,并在室内环境进行实际系统实验。实验结果表明,随着距离的增长RIT定位误差均值和中值大致稳定在80cm和70cm,相比RIPS分别下降了87.8%和60.7%,验证了RIT方法的有效性。
无线电干涉定位系统;室内定位;多径效应;空间多样性;无线电干涉室内定位跟踪
0 引言
位置信息在现代社会中发挥着重要的作用[1-3]。无线电干涉定位系统(Radio Interferometric Positioning System,RIPS)是为了解决无线传感器网络中的节点高精度定位问题提出的一种新型定位方法[4-5]。不同于其他基于相位的测距方法,RIPS使用了一种独特的“双发双收”测距机制,两个发射节点同时发射频率相近的单音信号,接收节点测量干涉形成的低频包络信号的相位,消除了对高信号采样率、初始相位和节点间高精度时钟同步的要求,使得低成本、高精度的无线电测相定位成为了可能。因此,RIPS自提出以来便受到了国内外学者的广泛关注[6-8]。
RIPS作为一种测相定位系统,在室外无线传感器网络等应用领域得到了高精度的定位结果。但在室内环境中,由于墙壁、屋顶、家具、电器等反射物众多,多径效应非常严重,RIPS相位观测值受多径效应影响严重失真,难以提供有效测距和定位服务[9-10]。
文献[5]证实通过架高天线可以降低地面反射,文献[7]将待估计的距离差看作随机变量,直接使用相位测量值以“平均后相偏残差函数”为优化对象,进行二维搜索定位。然而,以上这些方法都是针对室外环境中这种多径效应并不严重的场景,在室内复杂多径环境中并不能适用。文献[11]从理论上推导了镜反射的多径误差简单模型,并通过仿真分析了多径效应对RIPS实现高精度定位的限制。文献[12]利用幅度信息对多径参数进行估计,进而利用所估计出的多径参数对RIPS相位测量值进行修正,以减轻多径造成的测距误差。但该方法需要大量带宽作为支撑,且在室内严重多径环境下效果不稳定。目前为止,尚没有可行的方法来有效克服室内环境中多径效应对RIPS的影响,实现高精度的定位跟踪结果。
本文首先分析多径效应对RIPS相位测量的影响,揭示了存在直达径的情况下由多径引起的RIPS相位误差具有空间多样性,且服从特定的“类高斯”统计分布。基于这一观察,进而提出一种有效克服多径效应影响的无线电干涉室内定位跟踪方法RIT(Radio Interferometric Tracking)。不同于传统RIPS,RIT利用多径相位误差的统计分布特性,在已知初始位置的情况下,通过对运动速度进行估计来完成对室内目标的有效定位和跟踪。
本文基于USRP N210软件无线电平台构建了原型系统,并在室内环境进行实际系统实验。实验结果表明,待定位目标跟踪的误差随着移动距离的增加基本趋于稳定,误差中值和均值稳定在80 cm和70 cm,相比RIPS分别下降了87.8%和60.7%,验证了RIT方法的有效性。
1 无线电干涉测距基本原理
RIPS 采用了独特的“双发双收”测距机制,其基本测距单元如图1所示。RIPS基本测距单元是由四个节点组成的测距四元组。图中,A、B为发射节点,R、P为接收节点。
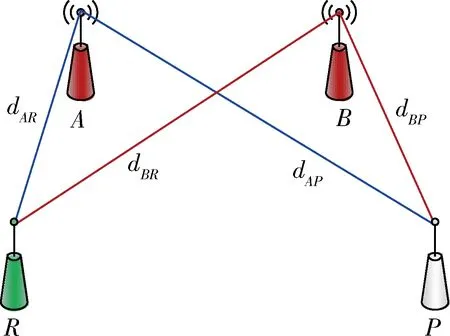
图1 RIPS“双发双收”基本测距单元
在一次测量过程中,发射节点A、B同时发射频率相近的单音信号(假设信号频率分别为fA和fB,且fA>fB,fA-fB=δ),接收节点R、P同时测量由发射信号干涉所形成的低频包络信号的相位。在没有多径情况下,R、P所测得相位的差值Δφ(i)与四个节点之间的距离存在如下关系:
(1)

RIPS相位差测量值与发射信号的初始相位和信号发射时刻无关,无需节点间高精度时钟同步,由于是对低频包络信号的相位进行测量,不需要高信号采样率,便于在低功耗、低成本的小型设备中实现。
2 多径效应对RIPS相位测量的影响
多径效应(Multipath Effect)是指电磁波经不同路径传播后,各分量场到达接收端时间不同,导致信号的衰落和相移的现象[14-15]。室内环境中反射物众多,多径效应严重,RIPS相位测量值存在很大误差,不能提供有效测距和定位服务。
多径效应具有空间多样性,即不同位置的多径传播是不同的。且已有研究成果表明,只要空间中两点的距离大于半个波长,就可以认为在这两个点的信道衰减和多径效应是不相关的[15]。对于室内运动目标的定位,其需要在多个频点进行多次相位测量,每次相位测量实际上是在不同的位置进行的,因此由多径引起的相位误差是随机的。
在存在直达径的多径环境下,无线电传播信道服从莱斯分布[15-16]。可以用莱斯因子K来表示信道的分布情况。在不同的莱斯因子K取值情况下,通过仿真给出了在不同位置由多径引起的RIPS相位误差εi,ABRP的分布情况,如图2所示。
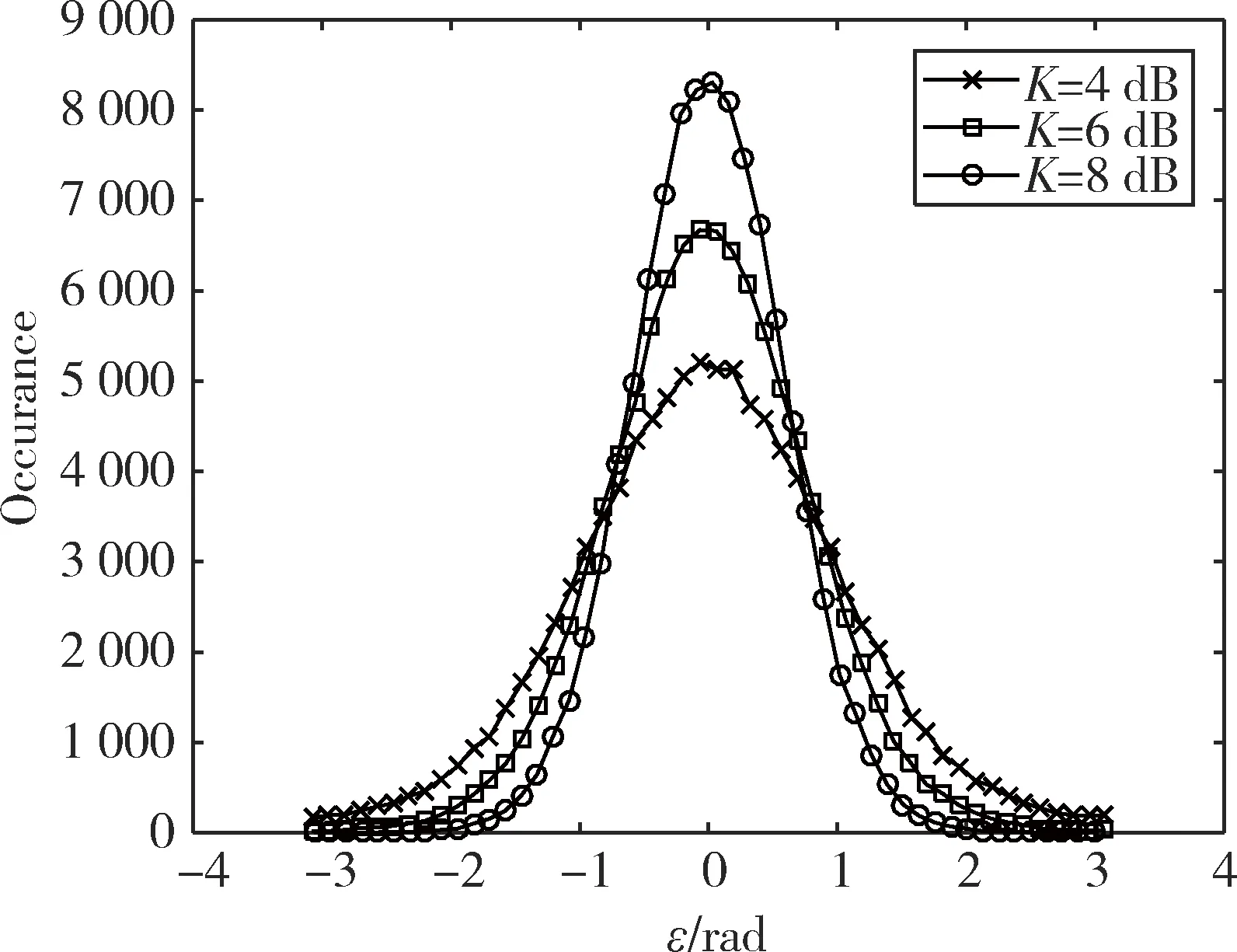
图2 不同K情况下RIPS多径相位误差εi,ABRP的分布
对于室内环境来说,一般情况下K的取值为4~12 dB[14]。当K=4 dB时,εi,ABRP的分布已经呈现出类似小方差的高斯分布。可以看出,在室内环境中,RIPS相位误差εi,ABRP的分布基本服从于接近高斯分布的特定统计分布,本文称之为“类高斯”分布。
3 RIT方法
本节利用多径相位误差的“类高斯”统计分布特性,提出基于无线电干涉的室内定位跟踪方法RIT。RIT使用同RIPS一样的相位测量过程,但RIT利用多径相位误差的统计分布特性,在已知初始位置的情况下,通过对运动速度进行估计来完成定位和跟踪。
首先考虑室内运动目标的运动规律,如图3所示,一般情况下,目标的运动轨迹可以用一段段的短距离匀速直线运动来进行近似和拟合。已知初始位置,如果可以得到每段直线运动的运动速度v(包括运动方向h和运动速率s),则可以完成对目标的跟踪。

图3 运动轨迹的分解
再考虑每一段从Pk-1到Pk的匀速直线运动,在其轨迹上一系列等间隔的N个点进行了RIPS相位测量。已知初始位置Pk-1(Pk-1为上一段Pk-2到Pk-1匀速直线运动的终点),给定运动方向h和运动速率s,则可以得到一系列的相位测量点位置,进而根据式(1)可以得到直达信号的RIPS相位差理论值,由RIPS相位差测量值减去理论值,则进一步可以得到由多径引起的相位误差。
如果h,s为真实速度,则所对应的真实相位误差将服从“类高斯”分布。如果h,s不是真实速度,则所得到的直达信号相位差理论值均匀随机分布,进而计算得到的RIPS相位误差则近乎均匀分布。
此时,对运动方向h和运动速率s的估计问题就转化为对特定分布的匹配问题。设计目标搜索函数(Objective Searching Function,OSF):
(2)
其中,Δφi为RIPS相位差测量值,Δφi,d为根据式(1)计算得到的直达信号RIPS相位差理论值,Δφi-Δφi,d表示了在位置i处由多径效应所引起的RIPS观测相位误差和其他因素所引起的相位噪声ni,ni相比于多径相位误差一般较小,在分析时将ni忽略,并不影响分析和最后所得出的结论。
对所有可能的h和s以目标函数OSFh,s进行搜索。真实h,s所对应的相位误差复数值在同一个方向相互叠加,对应较大的目标函数值;非真实h,s所对应的相位误差复数值在各个方向相互抵消,对应较小的目标函数值。目标函数OSFh,s最大时所对应的h,s则为真实速度。
已知初始位置,RIT通过对每一段匀速直线运动的速度v进行估计,完成对目标运动轨迹的跟踪。对于运动轨迹的分段,可以通过位置信息更新的时间间隔来完成。如果目标的运动速度为v=1 m/s,位置更新时间间隔为0.6 s,则对应的直线运动段划分长度为60 cm。每段运动段的终点位置作为下一段直线运动段速度估计的起点,以此来完成对目标位置的连续估计和更新。
4 实验结果
4.1 实验环境与实验配置
基于USRP N210软件无线电平台构建了RIT原型系统,并在室内进行实验。在室内共布置4个发射锚节点,位置分别为A1(0,0),A2(6,-0.6),A3(0,7.2),A4(6.6,5.4)(单位:m),参考接收节点位置为AR(3.6,6)。待定位目标节点P为接收节点,相位测量时间间隔为20 ms。待定位目标P以速度v=1.5 m/s从P0(3.6,1.2)移动到P4(3.6,4.8);以速度v=1 m/s从P4(3.6,4.8)移动到P9(0.6,4.8),再到P15(0.6,1.2),共移动10.6 m。位置刷新超时设定为0.6 s,对应30个RIPS相位观测值。已知初始位置P0,共需要输出{P1,P2,…,P15}共15个位置信息。
所使用测量载波频带为1.95 GHz~2.049 GHz,频率间隔为1 MHz,共100个测量频点,所有频点依次循环跳频测量,跳速为50 hops/s。进行100次实验,每次实验所走路径相同,但所使用的频点序列不同。RIT解算时运动方向h搜索范围为0~2π rad,搜索粒度为0.01 rad;运动速率s搜索范围为0~2 m/s,搜索粒度为0.01 m/s;每段解算得到的位置信息作为下一段解算的起点。
4.2 实验结果
对100次实验结果进行统计,定位误差的均值和中值随移动距离的变化情况如表1所示。
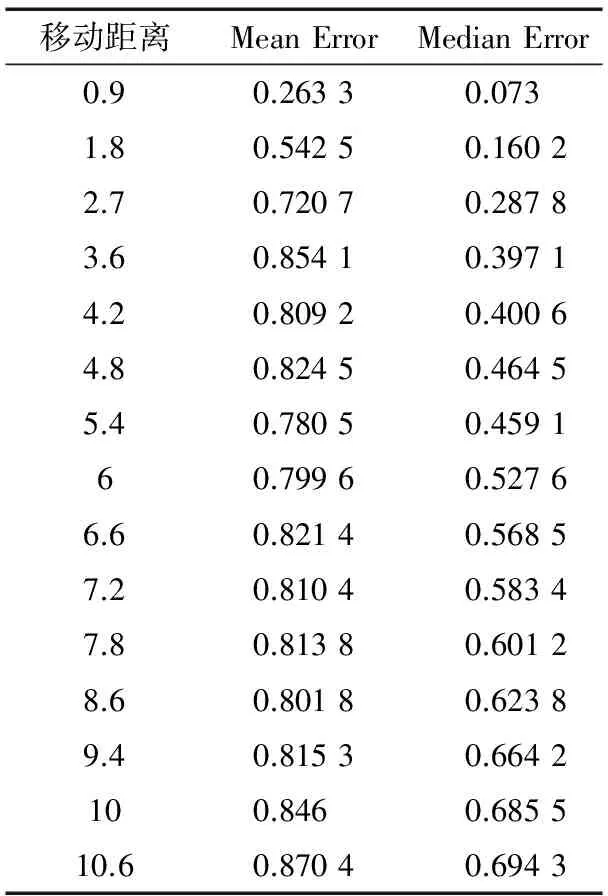
表1 定位误差随移动距离的变化情况 (m)
从实验统计结果可以看出,随着距离的增加,RIT定位误差的均值、中值大致稳定在80 cm和70 cm。同等条件下,在移动轨迹上等间隔的150个点进行了RIPS解算,定位误差的均值和中值分别为6.6 m和1.78 m。RIT方法定位误差的均值、中值相比于RIPS分别下降了87.8%和60.7%,实验结果验证了RIT方法的有效性。
5 结论
本文提出了一种基于无线电干涉的室内定位跟踪方法RIT。RIT利用相位误差的统计分布特性,设定目标搜索函数对运动速度进行估计,以此来完成对目标的定位与跟踪,是一种简单、高效的方法。基于USRP N210软件无线电平台构建了原型系统,在室内环境进行了实际系统实验,对RIT的有效性进行了验证。下一步的研究方向是急转向、急加速等情况对RIT性能的影响,以及基于其他小型平台的RIT实现。
[1] ZEKAVAT R,MICHAEL R B. Handbook of position location: theory,practice and advances[M]. Wiley-IEEE Press,2011.
[2] 张晨晨,毛永毅,张晓佳,等.一种基于AHP的数据融合无线定位算法[J].微型机与应用,2015,34(12):51-53,60.
[3] 黄海辉,李龙连.WSN中一种基于RSSI的移动节点改进定位算法[J].电子技术应用,2015,41(1):86-89.
[5] BRANISLAV K,AKOS L,MIKLOS M,et al. Node density independent localization[C]. Proceedings of the 5th International Conference on Information Processing in Sensor Networks (IPSN′06),New York,USA,ACM,2006:441-448.
[6] KUSY B,JANOS S,GYORGY B,et al. Radio interferometric tracking of mobile wireless nodes[C]. Proceedings of the 5th International Conference on Mobile Systems,Applications and Services (MobiSys′07),New York,USA,ACM,2007:139-151.
[7] DIL B J,HAVINGA P J M. Stochastic radio interferometric positioning in the 2.4 GHz range[C]. Proceedings of the 9th ACM Conference on Embedded Networked Sensor Systems (SenSys′11),New York,USA,ACM,2011:108-120.
[8] Zhang Yue,Qi Wangdong,Li Guangxia,et al. Performance of ML range estimator in radio interferometric positioning systems[J]. IEEE Signal Processing Letters,2015,22(2):162-166.
[9] LYMBEROPOULOS D,Liu Jie,Yang Xue,et al. A realistic evaluation and comparison of indoor location technologies: experiences and lessons learned[C]. Proceedings of the 14th International Conference on Information Processing in Sensor Networks. Seattle,Washington,ACM,2015:178-189.
[10] LEDECZI A,VOLGYESI P,SALLAI J,et al. Towards precise indoor RF localization[C] . Proceedings of the 5th Workshop on Embedded Networked Sensors (HotEmNets′08),Charlottesville,VA,2008:1-5.
[11] 黄艳,臧传治,于海斌,等.传感器网络中无线电干涉定位系统的多径误差分析[J].控制与决策,2009,24(2):231-235.
[12] Zhang Cheng,Qi Wangdong,Wei Li,et al. Multipath error correction in radio interferometric positioning systems[EB/OL].(2017-02-18)[2017-04-29]arXiv preprint arXiv:1702.07624.
[13] Xu Bing,Qi Wangdong,Wei Li,et al. Turbo-TSWLS: enhanced two-step weighted least squares estimator for TDOA-based localisation[J]. Electronics Letters,2012,48(25): 1597-1598.
[14] LINNARTZ J P M. JPL’s wireless communication reference website[EB/OL]. [2017-04-29]http://www.wirelesscommunication.nl/reference/chaptr03/indoor.htm.
[15] ANDREA G. Wireless communications[M]. Cambridge University Press,2005.
[16] CHO Y S,KIM J,YANG W Y,et al. MIMO-OFDM wireless communications with MATLAB[M]. Wiley Publishing,2010.
Indoor tracking method based on radio interferometry
Xu Bing,Qi Wangdong,Zhao Yuexin,Chen Longliang,Huang Mingzhou,Wei Li
(College of Command Information System,The Army Engineering University of PLA,Nanjing 210007,China)
Radio interferometric positioning system (RIPS) is a new high-precision phase-based positioning system. However,RIPS cannot provide a valid location service in indoor environments because of the multipath effects. In this paper,we firstly reveal the fact that multipath-induced errors follow an “approximate Gaussian” statistical distribution,and then we propose the indoor positioning and tracking method RIT (Radio Interferometric Tracking). RIT estimates the velocity of target by utilizing the statistical distribution of multipath-induced phase errors,and then efficiently completes the positioning and tracking of indoor target. We build the prototype system based on the USRP N210 software radio platform and conduct experiments in the indoor environments. With the distance increasing,the mean positioning error and the median positioning error is roughly stable at 80 cm and 70 cm,decreased by 87.8% and 60.7% compared to RIPS. The experimental results verify the effectiveness of the RIT method.
radio Interferometric positioning system (RIPS); indoor positioning; multipath effect; spatial diversity; indoor radio interferometric tracking
国家自然科学基金(61573376,61402520)
TN961
A
10.19358/j.issn.1674-7720.2017.24.017
徐兵,齐望东,赵跃新,等.基于无线电干涉的室内定位跟踪方法J.微型机与应用,2017,36(24):58-61.
2017-04-29)
徐兵(1988-),男,博士研究生,主要研究方向:无线传感器网络、无线电定位。
齐望东(1968-),通信作者,男,教授,博士生导师,主要研究方向:无线网络、网络安全、导航与定位。E-mail:wangdongqi@gmail.com。
赵跃新(1992-),男,博士研究生,主要研究方向:无线网络、无线电定位。
猜你喜欢
核科学与工程(2021年4期)2022-01-12
河北画报(2021年2期)2021-05-25
今日农业(2020年19期)2020-12-14
科学(2020年3期)2020-01-06
现代园艺(2018年2期)2018-03-15
现代园艺(2017年21期)2018-01-03
电子制作(2017年7期)2017-06-05
中学物理·高中(2016年12期)2017-04-22
智能系统学报(2015年4期)2015-12-27
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
