航迹控制系统中的精度控制方法验证
2017-12-29 01:01吴希恩
造船技术 2017年6期
胡 钧, 吴希恩
(上海外高桥造船有限公司, 上海 200137)
航迹控制系统中的精度控制方法验证
胡 钧, 吴希恩
(上海外高桥造船有限公司, 上海 200137)
通过对电子海图显示与信息系统及船舶自动舵系统的简述,引出航迹控制系统的组成,对航迹控制系统的控制方式和控制原理进行研究分析。阐述航迹控制系统的2种不同控制方式的优缺点和实现方法及其对目标航迹的跟踪方式。通过理论分析航迹控制系统在直线航行与转向航行时如何进行精度管控,证明航迹控制系统在发展中的理论优势及广阔的发展空间。
航迹控制系统;自动舵;电子海图显示与信息系统;精度控制
0 引 言
当今世界航运业蓬勃发展,同时也出现了航道拥挤、事故频发等问题,现代船舶的大型化及高速化给船舶航行安全带来了严峻的挑战。电子海图显示与信息系统(Electronic Chart Display and Information System, ECDIS)的出现被认为是继雷达和自动雷达标绘仪(Automatic Radar Plotting Aid, ARPA)之后在船舶导航方面又一项伟大的技术革命。ECDIS可以将航行中诸如船位、海况、海域环境与航道信息等一些相当重要的信息集成在一个屏幕上显示,直观的显示方式可以使驾驶员迅速了解重要信息且能及时地做出正确的操船决策,有效地预防各种险情。ECDIS系统与船舶自动舵系统的联动操作相结合,构成另一个重要的系统——航迹控制系统(Track Control System, TCS),其功能是帮助船员进行航路的规划和监视,以及船舶航行时航迹的保持。
根据国外资料的统计,每年由于船舶碰撞所造成的失事船舶几乎占船舶事故总数的43%,而碰撞事故有80%以上是人为因素造成的[1]。航迹控制系统能有效地减轻船员的负担,提高操船效率,减少人为操作失误导致的事故。但是目前并非所有新造船的船舶所有人会选择TCS,究其原因固然有经济因素的影响,也有对该系统认知度不够、误认为TCS使用不便、安全性不高。
伴随着世界整体科技水平的提高,航运业也开始向信息密集型和技术密集型方向发展。一系列现代先进科技设备被应用于船舶制造业,现代船舶就已经具备系统自动化和智能化的能力,如自动舵、自动电站和无人机舱等。通过不断提高航迹控制的精度管控,在今后可能实现航海领域内的无人驾驶。由此可见,船舶自动航行管理将会是日后航海科研技术的主要研究方向。
1 航迹控制系统组成
TCS是随着船舶自动化程度不断发展而产生的一种新型导航系统,其架构在ECDIS中,通过自动舵系统的控制舵机来改变船舶航向。其系统框图如图1所示。

图1 TCS框图
TCS整合多方数据信息以控制船舶在一条预设的航线上航行,且在自身船舶特性的条件下克服多种环境因素的影响,并对上述的影响做出补偿以保证船舶沿着预先设定好的轨迹航行。在航行过程中,船员在ECDIS上预先设定好航线,TCS从外部传感器获取船首向、船位、船速等信号,然后由程序计算得出当前航迹和预设航迹之间的偏差,并将计算结果换算成舵令发送至自动舵系统,由自动舵系统来控制航向的调整以确保船舶在规划航线上航行。TCS还能够对诸如洋流、风向等外部干扰因素计算偏航补偿,保证船舶在各个航路点之间的自动精准航行。
1.1 电子海图系统简介
在1995年11月的国际海事组织(International Maritime Organization, IMO)大会上讨论通过了ECDIS的性能标准,以其取代传统的纸质海图。之后,三大国际组织:IMO、国际海道测量组织和国际电工委员会分别通过了关于电子海图内容、图标、颜色等一系列规范。ECDIS作为一种辅助航行系统,在船舶航行过程中不但能够将纸质海图中各种航行信息要素集成在显示屏上展示,还可以为船舶安全航行提供必要的动态信息。挂靠我国港口的各类船舶,无论是航行在沿海还是内河,要求全部于2011年7月1日后的第一次年检前完成船载ECDIS的配备。
ECDIS是以高性能计算机为核心,以符合S-57标准的电子航海图(Electronic Navigation Chart, ENC)为基础,通过所连接的各种外部设备来获得所需信息,最后在系统终端上进行输入、输出以及显示的一种工具[2]。ECDIS的计算机主机负责航行动态信息的计算和海图矢量图形的处理工作,使用的ENC是政府规定的具有航道测量资质相关组织授权发行的。一份标准的ENC包含标准化内容与结构,通常完善地反映出对应纸质海图所包含的所有海图信息。为ECDIS提供外部航行信息的设备包括GPS、计程仪、陀螺罗经、AIS、测深仪等。ECDIS的终端设备包括显示器、键盘、鼠标、打印机、光驱、扬声器等一系列用来显示、输出各种海图数据和报警信息的设备。ECDIS框架如图2所示。
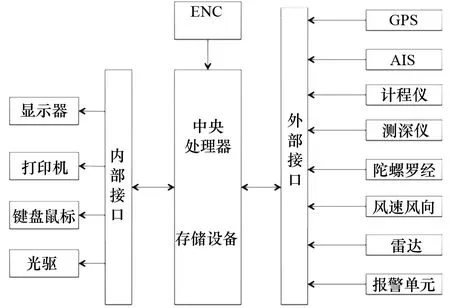
图2 ECDIS框架
1.2 自动操舵系统简介
自动舵系统(Auto Pilot System)是指通过对指令信号的计算自动完成操纵舵机运动的一种电气装置,是船上一个极为重要的控制设备。
自动舵系统能够使船舶在期望的航线上自动地保持航向的稳定。这种特性可满足船员对船舶航行时保持巡航速度的要求,同时还能使船舶拥有较短的转向距离,对于转向半径和航速的良好控制可以大幅地提升航行期间的燃油经济性,并且通过较少操舵次数大幅地缓解机械的日常磨损,降低维护成本。性能出色的自动舵系统不仅能够代替舵手操作舵机以减轻其劳动强度,而且能以更高的精度和更少的偏航次数来保持航向或航迹的准确性,同时还可以通过更小的偏航距离来提高实际航速。尤其是在远洋航行时,实际航行时间缩短、节省的燃料优势就愈发明显,显著提高航行的经济效益。
由图3可知,自动舵系统接受来自于陀螺罗经的船首向信号以及来自计程仪的船速信号,通过船首向信号与设定航向信号之间的差值计算出所需改变的航行角度,然后将转向计算所得的数据发送至位于舵机舱的控制单元,由控制单元将信号放大之后控制伺服电机驱动舵机转动,反馈单元获得实时的舵叶角度后再将信号发送至控制单元,当整个角度对比相等时转向过程结束。
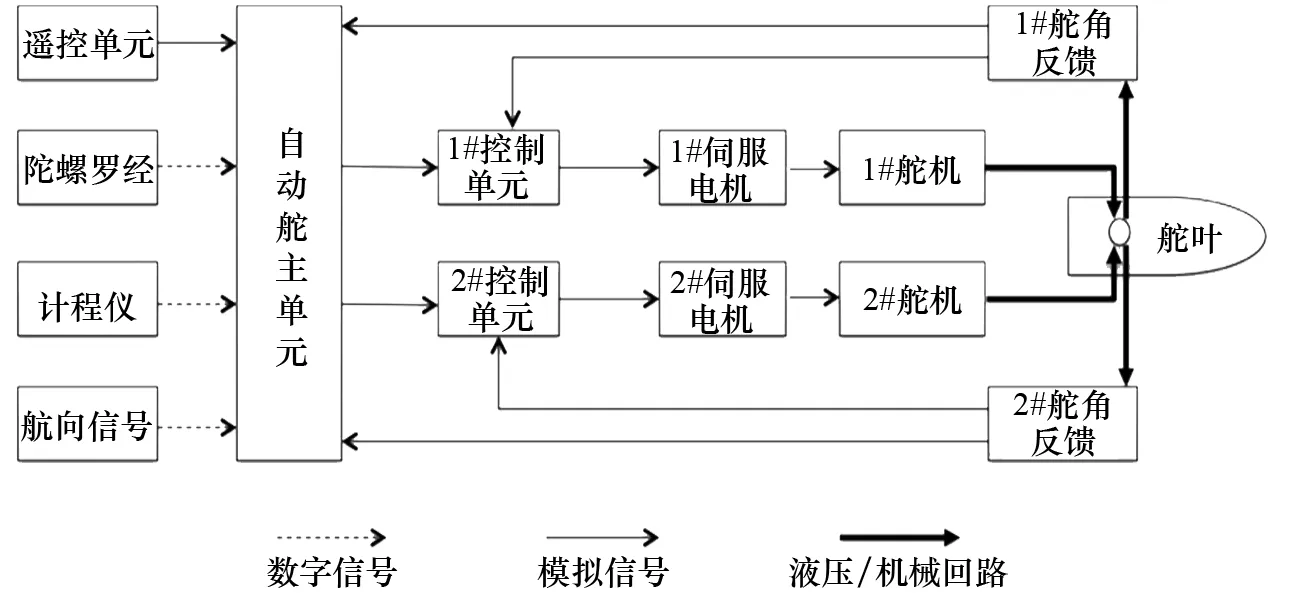
图3 自动舵系统框图
2 航迹控制方法
为使船舶经济又安全地航行,自动舵系统的性能就起着较为重要的作用。对于性能优良的自动舵系统,可在有效降低操舵频率的同时维持航向的稳定,而且其航迹也较为接近于一条直线。若是使用性能较差的自动舵,船舶的舵机会不断地动作以纠正航向的偏差,且这种船舶的航迹会呈现出曲折的“S”形。这样的操舵结果主要是由于动舵次数多,偏航角度大,以至于船舶在转向时承受更大的海水阻力所造成的。阻力的增大会加大船舶主机的负荷,增加有功功率的消耗,导致主机转速下降。主机遥控系统如需防止转速下降,必须使调速器增加燃油的供给,导致油耗大增。性能较差的自动舵系统不仅增加实际航程,降低相对航速,且提高船舶运营成本,降低船舶运营的生产率和经济效益。不仅如此,由于系统对航向偏差的不断校正而增加舵机的机械磨损和主机的有功功率消耗,易使得船舶的航行安全与效率受到影响。
如今的航迹控制自动舵产品根据控制方案可区分为两类:一是利用间接控制船舶航向来实现跟踪船舶航迹目的的间接式航迹保持控制模式,这种控制方式的产品主要由日本与美国公司生产,其利用自适应航向自动舵研发经验,配合航迹规划和导航计算的电子海图系统完成航迹控制的功能;二是依据对航迹偏差值的计算直接地改变舵角以使实际航迹跟踪上规划航迹的直接式航迹保持控制模式[3]。
2.1 间接式航迹模式
如图4所示,使用间接法的航迹控制模式把控制分成互相嵌套的3个控制环。最内层是通过对舵机的操纵使实际舵角一致于规划舵角的舵角控制环,其可使船首向的运动方向向着消除航迹偏差的方向回转。中间一环为船舶的航向控制环,其将陀螺罗经测量到的当前船首向信息同航向控制器产生的目标航向进行比较,然后将比较生成的航向偏差值根据系统当前所选择的自适应或PID控制方式,计算出规划舵角。最外层即为航迹控制环,它利用外部的船位信息计算出实际的航迹,然后再与规划的航线进行比较,利用航迹控制算法计算两者之间的差值,并给出消除航迹偏差的期望航向。上述3个控制环构成了一个内外嵌套的闭环控制系统。间接控制法将航迹与航向的控制功能互相分离,两者之间互不干扰。其优点在于可以方便利用航向自动舵成熟的技术与经验,而且还能在航迹控制与航向控制这2种控制模式之间方便地互相切换。

图4 间接式航迹控制系统
2.2 直接式航迹控制模式
直接控制法是将间接控制中的航向控制和航迹控制这2个部分的功能综合起来,首先它将接收到的航线计划指令、由GPS传来的船位信号以及陀螺罗经传来的船首向信号通过内建模型计算后输出舵机的转舵角度,于此同时完成航迹偏差和艏向偏差的控制。由于其控制性能优良,能很好地协调机动性能与燃能比之间的关系,比较适合于高精度的控制场合。对船舶位置、方向、航速这些实际上耦合的变量进行综合考量,依靠舵角的变化来直接控制航迹。但由于直接式控制很难获得精确的船舶动态特性参数,且航向角度不受直接控制,又须通过操舵来同时控制航向、横向漂移和航迹偏差等,因此对于航向角的收敛并不能保证。不但如此,由于船舶动态特性参数获取的困难,加上整个系统的构建复杂,使得在实际使用过程中调试难度变得相当大。
2.3 航迹跟踪方式
船舶在自然洋面上航行必然会受到风、浪及潮流的影响而产生航迹的偏差问题。人工驾驶船舶时,舵手会在一定的瞭望区域内观察船舶前方有无障碍物并且计算是否偏离了期望的航迹[4]。因此,当航迹控制系统进行航迹规划时,会模拟人工眺望的视线区域,当区域的外延与规划的航迹相交,则会产生一个偏差角,此时的交点定义为航迹瞄准点P,如图5所示,说明此刻船舶存在偏航,根据设定的最大偏差值则可以开始规划新的航向角以纠正偏航误差。这种航迹跟踪方法称为视线引导策略。

图5 航迹跟踪方式
航迹控制系统可通过计算航迹点坐标获得当前规划航向角度ΨAB,计算方法为
式中:dMPA与dMPB是从赤道到任意纬度A或B的纬线之间的距离。
距离dMP计算公式为

将航迹点A和B的纬度代入到式(2),计算出dMPA与dMPB的数值,再利用式(1)可解得计划航向角度ΨAB。
同理,由于航迹瞄准点位于规划航迹AB段上,利用式(1)和式(2)即可计算出P点的坐标,再利用式(1)计算出当前船位与瞄准点之间形成的规划航向角Ψγ,将该角度值再减去当前的船首向角度值,即得到消除偏差的航向角。
经视线引导策略算出的规划航向角被传递到航向控制系统中,通过对船舶的航向控制使得船舶按照规划航向角度逼近预定航线,从而使船舶相对于预定航线的偏差逐渐地趋向于零[5]。
3 航迹精度控制
依照航迹线的几何分布形状可将航迹跟踪控制方式分为直线航迹控制和曲线航迹控制2类。直线控制方式是在航迹的左右区间内作较小范围的整定控制,因为是小范围的整定,所以就可忽略横向漂移并对控制模型做一定的线性化处理,即可在特定的条件下达到航迹控制的精度要求。但在设计曲线航迹跟踪控制方式时,由于考虑到船舶操纵运动的影响,就不能忽略横向漂移的因素[6]。
3.1 直线段精度控制
实际航行中的船舶大多数时间都是处于直线航行的状态,所以对直线段的航迹控制同样是整个航迹控制过程中的重要部分。当船舶在直线航行时,由于受到洋流、风向、吃水等多种因素的影响,必定会出现程度不定的偏航,偏航后所处位置与预设航线之间的距离称为偏航距离(Cross Track Distance, CTD)。因此,对直线段航迹的控制实际上是依靠输入偏航距离d转换为输出首向指令
式中:Ψγ为确定航迹所需的期望航向;Δθ为由于航迹偏差产生的修正舵角。
如图6所示,航迹线上有3个点O,B,C,设其坐标为(x1,y1),(x2,y2),(x3,y3),此刻的船舶在大地坐标系下的坐标为(xt,yt),艏向角为Ψ。
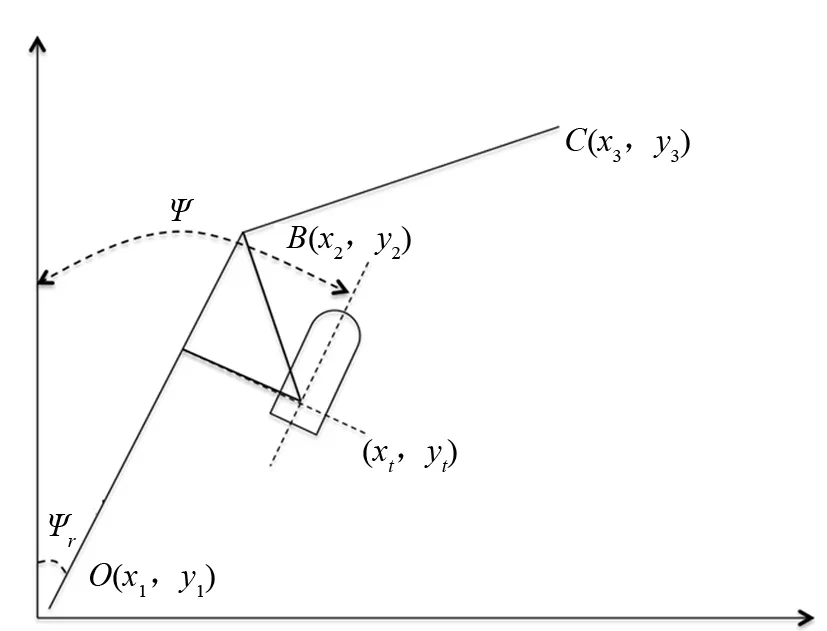
图6 直线段的航迹控制
由距离公式可得2个航迹点间的距离为
船舶航迹线的期望艏向角由航线上的坐标值决定,通过式(4)可得
由点到直线的距离公式可得出偏航距离为
定义当d值为负时,目标航迹位于船左舷;当d值为正时,目标航迹位于船右舷。在航迹控制过程中,偏航距离d通过航迹控制器得到船舶首向的修正角度Δθ,进而操纵舵机达到直线段航迹跟踪的目的。
3.2 转向段精度控制
在海图上,整段航线是由多个转向点所构成的航迹段互相连接构成的,而在这些航迹段上航行便形成了航迹段之间的切换。航迹控制系统对整段航线进行控制,实际上是对转向航迹部分与直线航迹部分的分别控制[7]。为使船舶在转向后能快速对新航向跟踪到位,使航迹偏差尽量减小,系统须增加对船舶转向段的航迹控制精度。
由于惯性的存在,船舶在高速匀速航行时无法迅速地在两条转向段之间切换,这时须根据船舶的转弯半径和当前航速计算出一条圆弧,使其同2条航迹线相切,通过航迹控制使船舶沿着圆弧平滑地切入到下一条航迹。对于回转半径较大的大型水面船舶而言,转向点控制精度的提升将减少船舶舵机运动频率,有助于提高船舶的燃油经济性。
如图7所示,航迹AD与DF组成了一个转向段,根据设定的回转速率与转向模型规划一条相切于航迹AD与DF的圆弧CE,使船舶沿着CE的轨迹进入到航迹段DF。据此,可将整个转向段的控制过程分为转向开始、稳定和结束等3个部分。根据船舶运动特性,因惯性的存在而使得船舶转向产生一个延时,船舶不可能在收到一个转向指令后立即进入回转过程, 因此船舶在转向开始之前会继续在原来的航迹上滑行一段距离,图中的BC段就是开始滑行的距离。从接收转向指令一直到BC航迹段结束的整个航行过程称之为转向开始阶段。在这之后船舶的回转速率达到了一定速度,开始进入船舶转向稳定过程。在船首向指向F航迹段的航向时即可宣告转向结束,整个转向过程完成。接着是进入直线段的航迹控制过程。
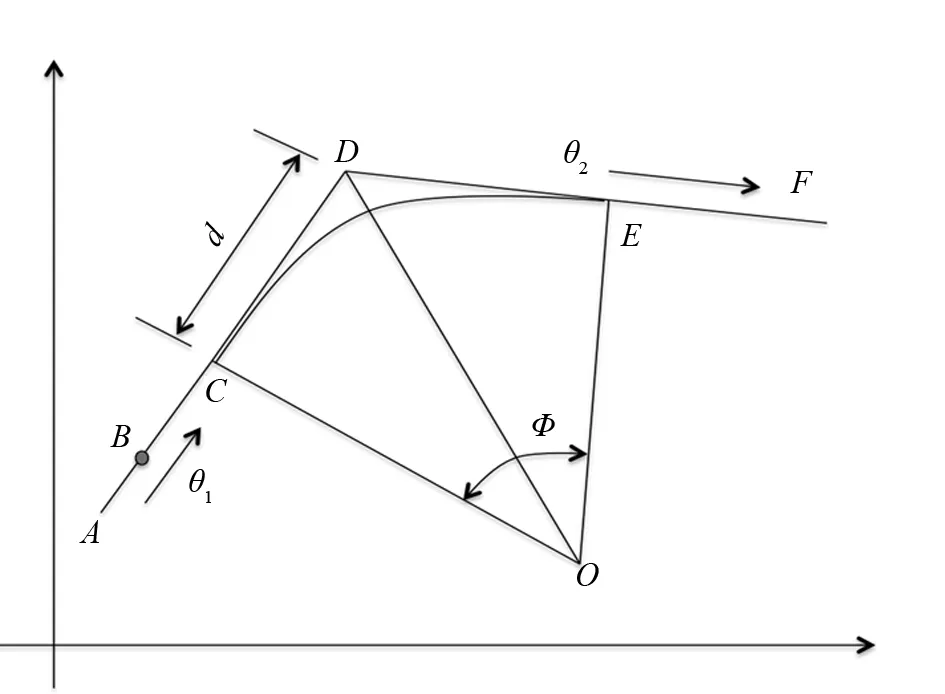
图7 转向段的航迹控制
惯性滑行距离BC段的长短主要取决于航速及回转延时的大小,回转延时同船舶特性、环境变化、运动姿态等很多因素有关,其中最为重要的是船舶特性。由于TCS的封装以及复杂性等因素,本文仅考虑船舶特性对转向控制过程的影响,其他因素暂时忽略不计。

式中:v为船速;r为回转速率;k为回转延时系数。
通过回转速率与船速可得回转半径R为
2条直线航迹的航向偏差为
由此可得

式中:Ts是步长,s;sign的值为1,1代表船舶向左转向,-1代表船舶向右转向。
当船首向角与下一航迹段DF的航向θ2相等时,即判定转向结束。
4 结 论
本文首先简单介绍航迹控制系统,然后主要对航迹控制系统的控制方法进行研究分析,根据IMO第69号决议内容,对航迹控制系统在直线段与转向段的精度控制做了阐明,得出精度控制有着至关重要的作用。与传统航向自动舵相比,无论在船舶导航的安全性还是燃油经济性等方面都有着巨大的优势。同时,随着航迹控制系统在今后民船建造中的选配率越来越高,对精度控制的深入研究可为航迹控制系统的航行试验程序优化提供理论支持。
[1] 中华人民共和国海事局.水上交通事故年报:中英文本(2000)[M].北京:人民交通出版社,2001.
[2] 鲁艳丽.基于ECDIS的船舶避碰系统的研究[D].哈尔滨:哈尔滨工程大学,2012.
[3] 徐国平,张显库.船舶自动舵研究综述[J].中国造船,2013,2:194-195.
[4] 鞠世琼.船舶航迹舵控制技术研究与设计[D]. 哈尔滨:哈尔滨工程大学,2007.
[5] 韩春生,刘剑,汝福兴,等.基于PID算法的船舶航迹自动控制[J].自动化技术与应用,2012,31(4):9-12.
[6] 孔庆峰.船舶舵机建模与航迹舵系统研究[D]. 哈尔滨:哈尔滨工程大学,2009.
[7] 姚明捷.航迹导航系统介绍[J].船海工程,2012,41(3):24-26.
VerifyingMethodofAccuracyControlinTrackControlSystem
HU Jun, WU Xien
(Shanghai Waigaoqiao Shipbuilding Co., Ltd., Shanghai 200137, China)
The track control system is introduced and analyzed based on the Electronic Chart Display and Information System(ECDIS) and the autopilot, and the composition of control system is given. The principle and mode of track control system are analyzed. The advantages and disadvantages of the two modes of tracking control system, the realization method, and the tracking mode of target track are expounded. Theoretical analysis is carried out on how to control accuracy of track control system in the course of straight and steering sailing, and the theoretical advantages and development space of track control system are proved.
track control system;autopilot;ECDIS;accuracy control
胡 钧(1982-),男,工程师,研究方向为智能船舶实船建造中的系统联合调试
1000-3878(2017)06-0013-06
U661
A
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
航海(2020年4期)2020-08-17
青年歌声(2019年12期)2019-12-17
民用飞机设计与研究(2019年4期)2019-05-21
少林与太极(2018年9期)2018-09-28
北京航空航天大学学报(2017年7期)2017-11-24
航海(2017年3期)2017-06-09
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年6期)2016-11-16