大型调水工程施工控制网关键技术研究
2017-12-27 17:27邸国辉郭际明周国成何婵军
地理空间信息 2017年12期
邸国辉,郭际明,周国成,何婵军
(1.湖北省水利水电规划勘测设计院,湖北 武汉 430064;2.武汉大学测绘学院,湖北 武汉 430079;3.精密工程与工业测量国家测绘地理信息局重点实验室,湖北 武汉 430079)
大型调水工程施工控制网关键技术研究

邸国辉1,郭际明2,3,周国成1,何婵军1
(1.湖北省水利水电规划勘测设计院,湖北 武汉 430064;2.武汉大学测绘学院,湖北 武汉 430079;3.精密工程与工业测量国家测绘地理信息局重点实验室,湖北 武汉 430079)
结合鄂北地区水资源配置工程,首先研究西北-东南走向的超长调水线路的施工坐标系的建立问题,实现了顾及高程归化的斜轴墨卡托投影的工程坐标系,避免了采用高斯投影产生的沿东西方向分带较多的问题,满足控制网边长综合投影变形小于10 mm/km的设计要求。其次,对工程中的宝林隧道洞外GNSS控制网进行观测和数据处理,分别采用BDS、GPS、BDS+GPS 3种模式解算各个时段的基线向量,并以GAMIT解算值作参考进行成果的精度分析。结果表明,BDS可以满足宝林隧道的测量精度要求。对比BDS、GPS单系统基线结果,N与E方向差异保持在5 mm左右,U方向大部分保持在10 mm左右,BDS+GPS解算结果的精度高于任何一种单系统。最后,对宝林隧道洞内平面控制网的布设方案进行分析,并针对单一导线法、交叉导线法加测陀螺方位角,将其作为新增观测量进行联合平差,得到优化布网方案。
斜轴墨卡托投影; 投影变形;控制网;宝林隧道;水资源配置工程
湖北省鄂北地区水资源配置工程是从丹江口水库清泉沟隧洞引水,穿越襄阳市、随州市,终到孝感市的大悟县。输水线路总长269.67 km,起点水位147.7 m,终点水位100.0 m,渠底纵坡1/3 000~1/30 000,主要建筑物有管桥、渡槽、倒虹吸等158处,其中宝林隧道是该项工程的一处重点子项。引水线路走向为西北-东南。
我国一般采用高斯投影建立工程平面坐标系。但在长距离调水项目的控制测量中,特别是东西向跨度较大的调水线路,投影长度变形较为明显,需要设置多个投影带来减小投影长度变形,但在不同投影带连接处需要考虑对接问题,对工程施工很不便利。沿调水线路走向建立斜轴墨卡托投影为基础的施工坐标系,可以解决投影带过多的问题。对于隧道的洞内控制,一般采用全站仪导线测量方式,导线布设方案有单一导线法、交叉导线法、全导线法等。对于特长隧道来说,需加测陀螺方位角,将其当作观测量和全站仪的观测值进行联合平差,以保证隧道顺利贯通。
1 基于斜轴投影的调水工程坐标系建立方法
1.1 斜轴墨卡托投影
对于东西走向的调水线路,跨越的经度范围较大时,一般采用分带方法,但带数较多。斜轴墨卡托投影能较好地这个难题。
考虑高程归化的斜轴墨卡托投影过程:先基于椭球膨胀法[5,6,10]将基础椭球投影至膨胀椭球,然后基于局部等角描写原理将膨胀椭球投影至球面,建立工程参考圆球,最后以工程中线起止点作为伪中央子午线,以工程参考圆球为基准,按高斯正形投影方法得到斜轴坐标[6]。具体建立方法如图1所示。

图1 调水工程系坐标建立方法
1.2 高斯投影长度变形分析
在高斯投影中,长度变形主要包括高程归化长度变形和高斯平面投影长度变形。若要求投影变形不大于10 mm/km,线路高程至归化高程面的距离不宜大于60 m,投影带宽度应不大于56 km[6]。
1.3 实例分析
采用以上数学模型编制了斜轴墨卡托投影软件。
鄂北地区水资源配置工程输水线路总长度为269.34 km,呈西东走向,可采用斜轴墨卡托投影建立斜轴坐标系如图2所示。投影面正常高为120 m,平均高程异常为-22.86 m,工程中心线定为斜轴墨卡托投影中央子午线,沿线路选择的测点如图3所示(QD-ZD为工程中心线)。
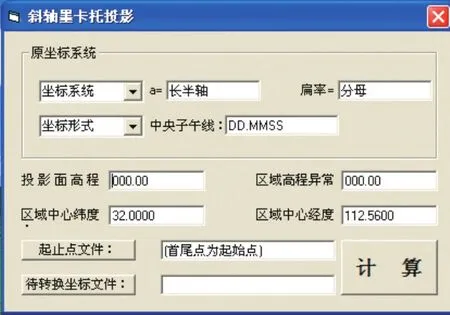
图2 软件界面

图3 测点位置图
1)长度投影变形分析。测点与伪中央子午线的偏距为 -19.7~19.8 km。测区线路上大地高区间为(92.95 m,- 27.05 m),则投影综合变形介于 9.05~- 9.80 mm/km 之间,均小于10 mm/km[6]。
2)角度不变形验证。在角度精度分析中分两部分进行:①原椭球面角度与圆球面角度的比较;②圆球面角度与斜轴平面坐标反算的圆球面角度的比较。计算结果表明,两者的较差绝对值最大值分别为0.000 5"、0.000 9",经分析主要为级数截断误差和舍入误差,验证了斜轴投影的角度不变性[6]。
采用TM50全站仪,其测距精度为±(0.6 mm +1 mm/km),测角精度为±0.5",对相邻点进行精密测距,对建筑物平面施工控制网边长进行检核。共测量110条边长,边长误差统计详见表1。可见,较差大于10 mm仅有3条,应是GNSS基线测量误差导致,没有系统误差,表明斜轴墨卡托投影符合设计要求[6]。
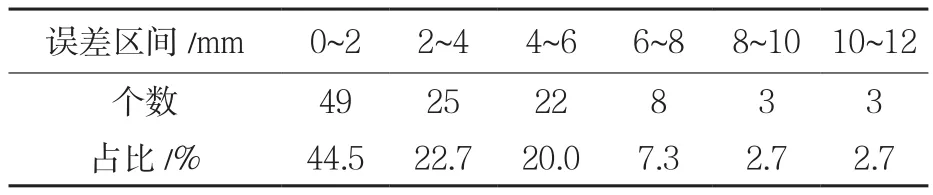
表1 精密测距与GNSS网边长较差统计表
2 BDS与GPS相结合建立调水工程控制网
对于宝林隧洞洞外平面控制,采用北斗导航卫星系统(BDS)与GPS相结合的双模GNSS测量技术[2]。本研究采用的接收机为6台Trimble NETR9。
2.1 超长隧道洞外控制网
试验1:在位于宝林隧道的二等GPS控制网进行复测,观测墩均安装有强制对中装置,基线长度介于0.22~14 km之间,进口、出口附近各布设4点。为了对GPS、BDS、BDS+GPS 3种模式进行分析,数据处理采用以下3种方案:
方案1:利用GAMIT软件和IGS发布的精密星历对GPS观测数据进行基线解算,将其解算结果作为参考值。
方案2:利用HGO软件,对BDS观测数据进行基线解算,采用广播星历,小于10 km的基线用L1观测值解算。
方案3:利用HGO软件,对GPS观测数据、BDS+GPS观测数据进行基线解算。
2.2 基线处理步骤及特殊基线处理办法
在基线处理方面,用方案1解算得到的NRMS约为0.22,小于0.5,解算合格,可作为参考值。用方案2解算得到的BDS基线进行各项检核,包括重复基线检查、同步环闭合差、异步环闭合差检查。
由于测量过程中74号点有一定的树木干扰,在BDS+GPS双模条件下受到的影响较小,但对于BDS单系统却影响很明显,出现了图4的基线系统性偏差很大的情况。
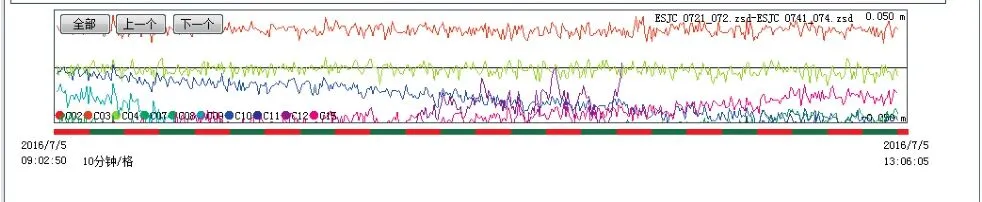
图4 系统性偏差较大的基线残差序列
经过分析,出现这种情况时,若只是删除不连续的时段或者质量较差的某部分时段,不可能改善这种极强的系统性偏差。考虑到北斗1-5号卫星为地球静止卫星,而且轨道高度很高,所以其观测数据的噪声可能较大,将其禁用,结果如图5。可以看到,结果得到明显改善。可以对图中仍有一定偏差的基线删除对应的时段。

图5 禁用北斗地球静止卫星(GEO)数据后基线残差序列
经过以上处理得到以下结论:对于所有观测条件良好的基线可采用自动方式处理,但74号点周边有树木干扰信号,与其相关的基线多数解算不合格,需对相关数据进行筛选编辑。通过禁用高轨(GEO)卫星,发现基线结果都能合格,经分析可能是因为干扰信号较强时,导致高轨卫星的观测数据有较大噪声,故将其禁用以改善解算结果。
在上述基线处理的同时,需要对同步环、异步环以及重复基线较差进行计算,具体统计如表2(BDS单系统)。
从表2、表3、表4可见,BDS单系统的同步环、异步环以及重复基线较差等均符合规范要求。

表2 BDS单系统解算重复基线差统计(取绝对值)
为研究基线的外符合精度,通过与方案1中GAMIT解算结果作对比,北斗数据进行基线解算,最终成果符合规范的限差要求[8,9]。
基于3个方案的计算结果可知,BDS+GPS观测数据外符合精度在N和E方向上可控制在±5 mm左右,相比BDS单系统N方向、E方向、U方向精度分别提高36.7%、14.1%、30.9%,相比GPS单系统分别提高8.5%、18.6%、20.9%[10]。

表3 BDS单系统解算同步闭合环统计(取绝对值)

表4 BDS单系统解算异步闭合环统计(取绝对值)
2.3 不利条件下的GNSS控制网
试验2:平面施工控制网有8点,GNSS控制网位于峡谷地区,GNSS观测时段长度为100 min,采用广播星历,基线用L1+L2观测值解算,研究GPS、BDS+GPS、BDS 3种模式的定位效果。
同步环的总长度范围为 5.357~51.397 km,各坐标分量闭合差的限差范围为2.5~17.9 mm,环闭合差的限差范围为 5.1~35.8 mm。

图6 GPS、BDS+GPS、BDS环闭合差直方图
从图6分析,BDS+GPS、BDS较GPS解算同步闭合环超限个数明显减少,且GPS+BDS较GPS解算同步闭合环闭合差明显减小。根据基线计算结果,两者的环闭合差范围0~10 mm的占比各为100%、60.71%;BDS也较GPS解算同步闭合环闭合差明显减小,其环闭合差范围0~10 mm的占比为100%。
BDS+GPS较GPS解算精度明显提高,其原因是在GNSS观测条件较为复杂的情况下,BDS+GPS比GPS增加了5~8颗卫星,可以通过筛选信号质量、卫星位置等信息构成更好的定位星座,使得定位信息更加准确。
2.4 平差情况及复测点稳定性分析
为了分析不同的数据处理策略在平差结果以及分析稳定性方面的差异,采用武汉大学测绘学院研制的CosaGPS软件,以宝林隧道二等GPS控制网为例,分别对3种数据(GPS、BDS 、BDS+GPS)得到的基线结果进行平差。
需要注意的是,不能简单地把所有基线均作为同步基线,这样会使得参与平差的基线过多,导致单位权中误差估计的偏离,需要按照同步基线选取原则进行。
进行固定1点1方向的工程网平差后即可得到二维施工网坐标,然后与前一期观测数据进行对比,进行复测点稳定性的分析[4]。
BDS、GPS、 BDS+GPS的点位中误差最大值分别为 4.6 mm、2.6 mm、2.6 mm ;平均值分别为 3.2 mm、1.8 mm、1.8 mm,所有点的平面点位中误差均小于《水电水利工程施工测量规范》规定的±7 mm。另外,从BDS单系统数据的二维网平差结果可知,其平均边长相对中误差为1/376 000,小于1/250 000的规定[4]。
以坐标较差的限差和点位中误差为依据,对控制点的稳定性进行分析。图7为3种数据平差后与前一期观测较差情况。
从图7可知,X、Y两个坐标分量的较差均小于10 mm,满足规范的复测限差要求。但仅此单方面考虑,无法考虑成果中位移值的人为因素、仪器误差、外界因素等,因此需用更科学的方法进行稳定性分析。
两期观测可认为是同精度观测,设同名点点位中误差为σ1、σ2,由误差传播定律可知:


图7 不同方案平差后与前一期坐标较差对比
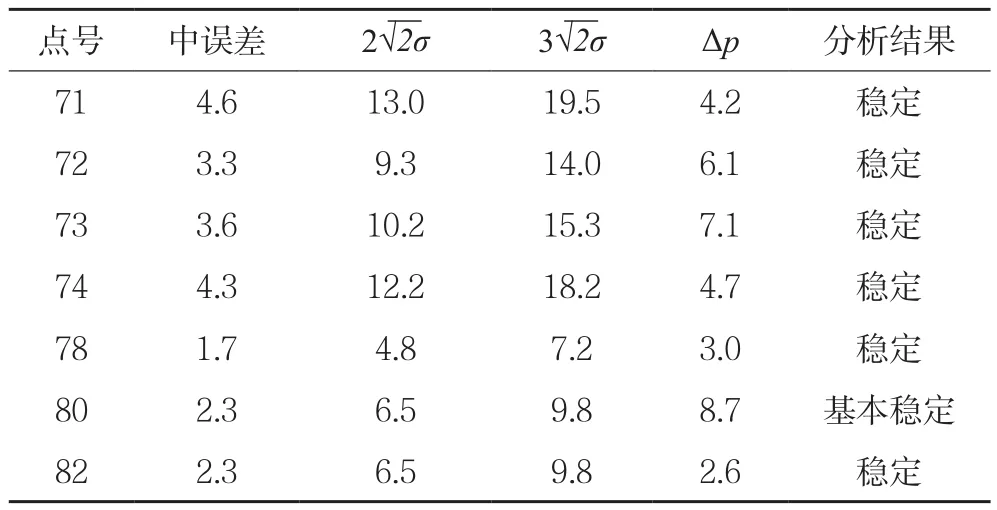
表5 两期坐标稳定性检验 /mm
从以上分析可得到复测点基本保持稳定的结论,3 种数据处理得到的点位位移也可基本一致,由此说明北斗系统在调水工程中应用具有可行性[1]。
3 横向贯通误差模拟计算
3.1 洞内测量误差分析
根据出洞点误差椭圆元素和贯通面方位角,可计算横向贯通中误差。宝林隧洞的施工方案是采用一台TBM设备单向开挖,则出洞点即贯通点。出洞点点位误差的误差源包括进洞点后视方位角误差、进洞点点位误差和洞内平面观测误差。洞内控制测量采用的全站仪测角中误差1.5"、测距精度1 mm+1.5 ppm,采用的陀螺仪的方位角中误差为8"。
宝林隧洞全长13.8 km,要求洞外和洞内控制测量的综合横向贯通中误差不大于200 mm。依据《DL/T 5173-2012 水电水利工程施工测量规范》规定,洞室一侧开挖长度大于8 000 m时,应加测陀螺方位角。根据相关文献,加测1个陀螺方位角时,最优加测位置为距出洞点1/3处;加测多于1个陀螺方位角时,最优加测位置为按距离均匀分布[1]。针对单一导线法和交叉导线法,讨论加测0个、1个、2个、3个陀螺方位角的情况,并计算加测陀螺方位角后的贯通点点位误差。对于0个陀螺方位角的情况,还讨论了连续自由设站法[1]。
横向贯通中误差包括进洞点坐标、起始方位角和洞内观测误差等三项误差,根据误差传播定律,可得到总的横向贯通中误差,如图8所示。

图8 横向贯通误差
由图8可知,加测3个陀螺方位角的交叉导线方案满足要求。同时考虑到隧洞通视条件和旁折光等影响,洞内控制最优方案可采用直道边长200 m、弯道边长100 m的交叉导线法方案[1]。
4 讨 论
4.1 基于斜轴墨卡托投影方法建立统一的工程坐标系统
在进行水电水利工程的投影带设计时,要考虑到鄂北地区水资源配置工程东西方向跨距长、施工精度要求高的实际情况,而斜轴墨卡托投影正好适用于这种情况,能够有效控制投影长度变形,避免了分带方法导致的相邻分带坐标衔接误差和频繁的坐标转换。
若线路高程至归化高程面的距离不大于60 m,投影带的宽度应不大于56 km(即至投影中线的垂距不大于28 km),则投影长度变形不大于10 mm/km。
4.2 BDS/GPS建立工程控制网
在调水工程施工平面控制中,北斗单系统数据可以满足规范要求,BDS洞外控制网对隧道横向贯通的影响也小于限差,基线结果方面N、U方向GPS优于BDS,E两者基本一致,可能是因为目前北斗的星座几何分布中大部分卫星都在南边,故南北方向的精度较差,东西向的精度可与GPS一致。
BDS+GPS在外符合精度方面相较于任何单系统,在N、E、U三个方向都有改进,相比GPS单系统分别提高 8.5%、18.6%、20.9%。在调水工程中,可选用BDS+GPS数据得到较高精度。
利用复测数据进行稳定性分析时,3种数据得到的结论基本一致。在GNSS观测条件较为复杂的情况下,BDS+GPS可比GPS增加5~8颗卫星,BDS+GPS较GPS解算精度明显提高。结果表明,BDS+GPS双模GNSS技术可明显提高GNSS测量的定位可用性和精度。
4.3 洞内控制测量技术与方法
对于长达13.8 km的宝林隧洞,若达到横向贯通中误差不大于200 mm的目标,同时考虑到隧洞通视条件和旁折光等影响,优化的布站方案可采用交叉导线法并加测3个陀螺方位角的方案。
[1]郭际明,杨学彬,陈劲林.引水隧洞洞内平面控制网布设方案设计与分析[J].测绘地理信息,2017(4) :17-20
[2]邸国辉,程崇木.GPS/GLONASS组合测量的比较分析[J].城市勘测,2006(2):10-12
[3]边少锋,刘强,李忠美.斜轴变形椭球高斯投影方法[J].测绘学报,2015 44(10):1 071-1 077
[4]赵胤植,郭际明,邸国辉.BDS/GPS在鄂北水资源配置工程中的应用与分析[J].测绘地理信息,2017(4) :109-113
[5]陆鹏程,林冬伟.斜轴墨卡托投影模型及其应用分析[J].铁道勘察,2010(4):26-29
[6]何婵军,邸国辉.顾及高程归化的斜轴墨卡托圆柱投影的应用研究[J].水利水电技术,2017(3): 34-38
[7]刘幼华,邸国辉.高速铁路CPⅢ平面控制网粗差探测[J].人民长江,2010,41(11):51-53
[8]郭际明,孔祥元.控制测量学(下册)[M].武汉:武汉大学出版社,2007
[9]王利, 张勤, 范丽红, 等. 北斗/GPS融合静态相对定位用于高精度地面沉降监测的试验与结果分析[J].工程地质学报,2014,23(1): 119-125
[10]金立新,付宏平.法截面子午线椭球高斯投影理论[M].西安:西安地图出版社,2012
[11]杨元喜, 李金龙, 王爱兵, 等. 北斗区域卫星导航系统基本导航定位性能初步评估[J].中国科学(地球科学), 2014,44(1): 72-81
[12]周正朝, 袁本银, 潘国富. 中海达HGO软件在GPS/BDS/GLONASS静态解算的应用分析[J].测绘通报, 2013(3):120-121
[13]邸国辉,朱小欢,吴汉,等.引江济汉工程施工控制网设计与数据处理[J].人民长江,2014(16):56-59
本 刊 声 明
为适应我国信息化建设,扩大本刊及作者知识信息交流渠道,本刊数据已被《中国核心期刊(遴选)数据库》《CNKI 中国期刊全文数据库》和《中文科技期刊数据库(全文版)》等收录。在《地理空间信息》发表的论文均默认将其在著作权保护期内的复制权、发行权、汇编权、翻译权以及网络传播权授权给《地理空间信息》编辑部,编辑部可将上述权利转授给第三方使用。作者不再许可他人以任何形式使用该篇论文,但可以在其后续作品中引用(或翻译)该论文中部分内容或将其汇编在作者的非期刊类文集中。如不同意,请事先声明,本刊另作处理。其文章的著作权使用费与本刊稿酬一次性给付(已在收取发表费时折减和换算为杂志赠阅)。
(本刊编辑部)
P258
B
1672-4623(2017)12-0001-05
10.3969/j.issn.1672-4623.2017.12.001
2017-10-25。
湖北省水利重点科研资金资助项目(HBSLKY201608)。
邸国辉,教授级高级工程师,主要从事GNSS、RS的生产和研究。
猜你喜欢
卷宗(2021年2期)2021-03-09
工程建设与设计(2020年9期)2020-06-20
空间科学学报(2020年4期)2020-04-22
舰船电子工程(2019年12期)2019-12-26
当代水产(2019年10期)2019-12-18
河南科技(2015年18期)2015-11-25
铁道勘察(2015年2期)2015-03-16
新闻前哨(2015年2期)2015-03-11
新疆农垦科技(2014年7期)2014-02-28
铁道标准设计(2013年4期)2013-05-30