
高分三号卫星飞行程序设计与在轨验证
2017-12-25 06:04张和芬袁智柳翠翠
航天器工程 2017年6期
张和芬 袁智 柳翠翠
(北京空间飞行器总体设计部,北京 100094)
高分三号卫星飞行程序设计与在轨验证
张和芬 袁智 柳翠翠
(北京空间飞行器总体设计部,北京 100094)
高分三号(GF-3)装载有大型合成孔径雷达(SAR)天线及大型太阳翼,因此在其飞行程序设计中要重点考虑太阳翼和SAR天线的展开设计,以及它们的展开对卫星的扰动力矩和姿态的影响。通过分析显示:太阳翼展开对卫星姿态角和姿态角速度影响较大,为此对几种太阳翼展开未锁定的情况作出故障预案;通过分析SAR天线展开的动力学特性,以及SAR天线展开对卫星姿态的影响,进行相应设计,并为实现SAR天线展开可控,采取相应措施。GF-3卫星在轨验证结果表明:太阳翼和SAR天线展开结果良好,飞行程序设计合理有效。
高分三号卫星;飞行程序;太阳翼;合成孔径雷达天线
1 引言
卫星的飞行程序规定卫星从发射前在发射工位上卫星初始状态的设置到整星在轨交付前的主要程序和正常飞行阶段的日常使用程序,并会详细分解第1天入轨飞行中从星箭分离时刻到初次建立高精度对地3轴稳定姿态过程中的卫星动作、地面指令操作程序及指令执行判据,定义轨道调整和在轨测试中的主要内容和流程。可见,飞行程序设计对卫星任务的完成具有重要的作用。
高分三号(GF-3)卫星是中国首颗具备高分辨率成像能力的C频段多极化合成孔径雷达(SAR)成像卫星。相较于以往的大型遥感卫星,GF-3卫星首次携带大型平板相控阵天线(SAR天线)作为载荷,具有载荷体积大、挠性大的特点,因此要设计适合其特点的飞行程序[1]。
本文首先对GF-3卫星的飞行程序设计进行简要介绍;然后重点针对太阳翼和SAR天线的展开设计进行分析,根据分析结果设计飞行程序;最后,通过在轨测试数据,对飞行程序设计的合理性进行验证。
2 飞行程序设计
飞行程序设计原则有一些通用性,同时也要根据卫星自身特点进行特殊考虑。GF-3卫星飞行程序详细规定了各分系统的发射前状态设置要求,以及发射入轨阶段、SAR天线和数传天线解锁、轨道机动过程、侧视姿态机动、SAR分系统工作状态建立、SAR分系统成像设置等详细步骤。GF-3卫星包括太阳翼和SAR天线2个柔性部件,均安装在星体外侧,双侧太阳翼展开后跨度将近20 m[2],SAR天线展开后跨度也为十几米。因此,相对于以往遥感卫星,太阳翼和SAR天线更大,需要展开时间更长,如何在卫星刚入轨后前几弧段的有限时间内,让太阳翼和SAR天线展开顺利且过程可控,是本文关注的重点。
2.1 卫星坐标系
卫星本体坐标系(OS-XSYSZS)如图1(a)所示[3],以星箭分离面理论圆心点为原点;XS轴位于星箭分离面内,垂直于SAR天线压紧面,指向卫星正常飞行方向;YS轴位于星箭分离面内,垂直于太阳翼压紧平面;ZS轴垂直于星箭分离面,由服务舱指向载荷舱方向,该轴为卫星纵轴方向,与XS轴、YS轴构成右手坐标系。
卫星轨道坐标系(OO-XOYOZO)如图1(b)所示,以轨道当地点为原点;XO轴(滚动轴)为飞行速度矢量方向;YO轴(俯仰轴)垂直于轨道面并指向轨道角速度的反方向;ZO轴(偏航轴)平行于轨道平面指向地心方向,与XO轴和YO轴构成右手坐标系。
GF-3卫星飞行坐标系(OF-XFYFZF),取当地轨道坐标系作为惯性参考基准,原点取在整星质心处。卫星正常飞行状态下,飞行坐标系与本体坐标系3轴方向一致,与轨道坐标系3轴方向一致,整星纵轴对地飞行。其中:XF轴定义为滚动轴,对应姿态角AXF;YF轴定义为俯仰轴,对应姿态角AYF;ZF轴定义为偏航轴,对应姿态角AZF。
2.2 太阳翼展开设计分析
通过建立基于Adams的太阳翼展开过程动力学分析模型,分析了太阳翼展开过程中卫星的姿态角和姿态角速度,见图2。可以看出,太阳翼展开过程中对星体质心-ZF轴具有干扰力矩,对星体姿态ZF轴影响显著,展开过程中ZF轴最大姿态角为-20.070°,最大姿态角速度为-2.060 00(°)/s。因此,在轨展开过程中可能会出现由此引起的各种故障模式。对如表1所示的12种状态进行分析,计算这些状态下的卫星质心和转动惯量,当发生太阳翼展开未锁定的故障时,通过注入新的转动惯量块,保证卫星姿态稳定。
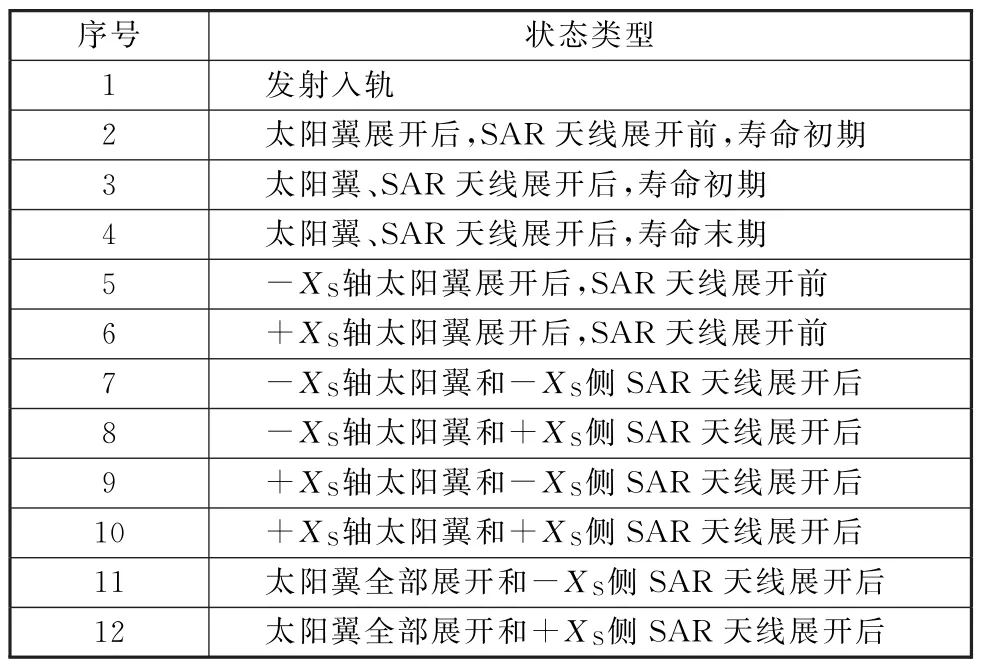
表1 卫星在轨可能出现的状态Table 1 States of satellite on orbit
2.3 SAR天线展开设计分析
针对大型SAR天线的展开特点,对展开过程进行多方面的设计分析。
首先,地面分析了SAR天线单侧和双侧展开对卫星姿态的影响。假设SAR天线展开前卫星3轴姿态角为0.000°,姿态角速度为0.000 00(°)/s,单侧SAR天线展开对卫星姿态角AXF,AYF,AZF的影响为0.979 2°,-4.941 2°,-0.125 2°。SAR天线双侧展开具有对称性,对卫星姿态的影响要小于单侧展开,在一定时间内,俯仰和滚动方向姿态角度基本没有变化,偏航方向姿态角最大为0.047°。因此,在轨展开时要求双侧SAR天线同时展开。SAR天线展开如图3所示。通过对双侧天线同时展开的工况进行分析可知,展开过程中导致的卫星姿态变化,在可控范围内,且不影响太阳翼对日获得能量[4]。
其次,为了实现SAR天线展开过程可控,天线展开机构采用以下设计。①接收测控分系统指令,通过控制电机的启动和停机、正转和反转,控制实现SAR天线展开的启动、停止、展开和收拢(仅在地面试验和故障情况下进行反转,即收拢操作)。②监测SAR天线展开机构的工作状态,并将遥测数据通过数管分系统下传到地面。③根据预定判据,在展开到位时自主关机,在异常情况下自主或依据指令停止天线展开或收拢动作。④SAR天线展开时,为防止因为卫星本体姿态控制导致卫星本体与SAR天线发生共振,影响天线展开,在SAR天线展开过程中要求对卫星本体姿态停止控制。经过地面仿真分析,计算出天线展开+稳定的时间,作为展开过程中的停止控制时间。由于弧段限制和SAR天线展开过程时间有限,因此要求在展开过程中遥测判读设计紧凑,保证监测天线展开过程的正确性[5]。
最后,对SAR天线展开过程进行动力学分析,采用展开前20 s展开速度为0,然后进行匀加速度展开一段时间,最后保持匀速展开的展开过程。通过展开分析可知:天线板及各杆件均能顺利展开锁定到位,且速度平稳,机构设计合理可行;“先加速、后匀速”的速度控制方案可较好地驱动可展开支撑桁架展开,并在锁定时保证合理的锁定速度和冲击力;SAR天线展开过程中自身冲击力矩满足整星要求。
在故障预案方面,由于SAR天线体积较大,挠性特征明显,展开后可能出现卫星姿态角过大和红外引入无效的情况,因此设置一定时间后若红外引入无效,就自主转入安全模式,并准备注入相关指令块,进行对地捕获。
3 在轨验证
3.1 卫星入轨轨道参数及特性评估
GF-3卫星入轨后,经地面测算得到卫星入轨点(星箭分离点)的误差如表2所示。可见,卫星实际分离点轨道参数与理论设计值一致,卫星入轨后的轨道根数误差满足设计要求,卫星准确进入预定轨道。

表2 卫星轨道根数(J2000坐标系)误差Table 2 Errors of satellite orbit elements(J2000)
3.2 太阳翼展开情况
在卫星抛开整流罩前,±XS太阳电池阵无输出;抛掉整流罩后,+XS太阳电池阵接受阳光照射,为卫星供电并为2组平台蓄电池充电;在太阳翼展开解锁后,±XS太阳电池阵建立在轨正常工作状态。
对于太阳翼,外板设计为平台太阳电池板,中板、内板、连接板设计为收/发(T/R)太阳电池板,对于平台蓄电池组采用交叉充电设计。因此,任何一块外板受照后,可为2组蓄电池充电。太阳电池阵输出电流变化范围为[23,25]A,满足设计指标要求。图4为太阳电池阵输出电流曲线。
太阳翼展开前,卫星3轴姿态角为0.006°,0.001°,0.005°。展开后,3轴最大姿态角为0.030°,2.500°,-23.000°。展开后,3轴姿态角速度最大为0.042 00(°)/s,-0.080 80(°)/s,-1.229 40(°)/s。图5为太阳翼展开后3轴姿态角和姿态角速度输出曲线,图6为陀螺输出曲线。
经在轨验证,太阳翼展开情况良好,展开过程停止控制,展开后姿态角、姿态角速度在合理范围内,陀螺输出正常,太阳翼展开成功。
3.3 SAR天线展开情况
2016年8月10日,SAR天线在轨成功展开,展开过程中的各项遥测参数均在正常值范围内,-XS侧SAR天线展开时间为4′10″,+XS侧SAR天线展开时间为4′14″,与地面展开试验数据一致性较好。
3.4 卫星姿态控制功能、性能测试情况及评估
1)消除初始姿态偏差情况
2016年8月10日07:17:50,星箭分离,此时3轴姿态角速度分别为-0.068 65(°)/s,0.050 65(°)/s,-0.117 35(°)/s,进入消除初始姿态偏差模式,完成太阳翼展开控制。控制模式字切换曲线如图6所示。可见,卫星按预定设计程序飞行,消除初始姿态偏差阶段的姿态及角速度满足设计指标。
2)卫星滚动侧摆、右侧视二维导引情况
卫星正常运行模式时默认处于右侧视状态,从正常飞行模式转入正常运行模式,开始滚动-31.5°侧摆机动,同时太阳翼采用定角保持策略开始转动,采用6个动量轮控制。图7(a)和图7(b)为滚动0°至-31.5°的3轴姿态角和姿态角速度曲线,机动+稳定的时间为291 s。3轴姿态控制误差优于0.001°,姿态角速度控制误差优于0.000 15(°)/s,满足姿态控制精度优于0.03°、姿态角速度控制精度优于0.000 5(°)/s的要求。图7(c)和图7(d)为机动过程中8月17日06:46:30开始从右侧视姿态(滚动-31.5°)机动至左侧视姿态(滚动+31.5°),此时在境外无遥测。07:09:46开始从左侧视姿态机动回右侧视姿态,太阳翼同时转动。07:16:37机动到位且稳定,机动63°及稳定时间为411 s,满足小于525 s的指标要求。图8为卫星姿态机动过程中太阳翼转角曲线,可见,太阳翼驱动正常,始终保持对日定向。
3.5 SAR载荷功能测试情况及评估
SAR载荷分系统在完成长期加电后,在8月15日进行首次成像,至8月18日飞控结束前,共进行了18次成像,成像过程中各遥测参数均在正常范围内[5-6],通过地面处理系统对图像进行处理后,各成像模式工作正常。表3为成像模式及主要参数汇总。
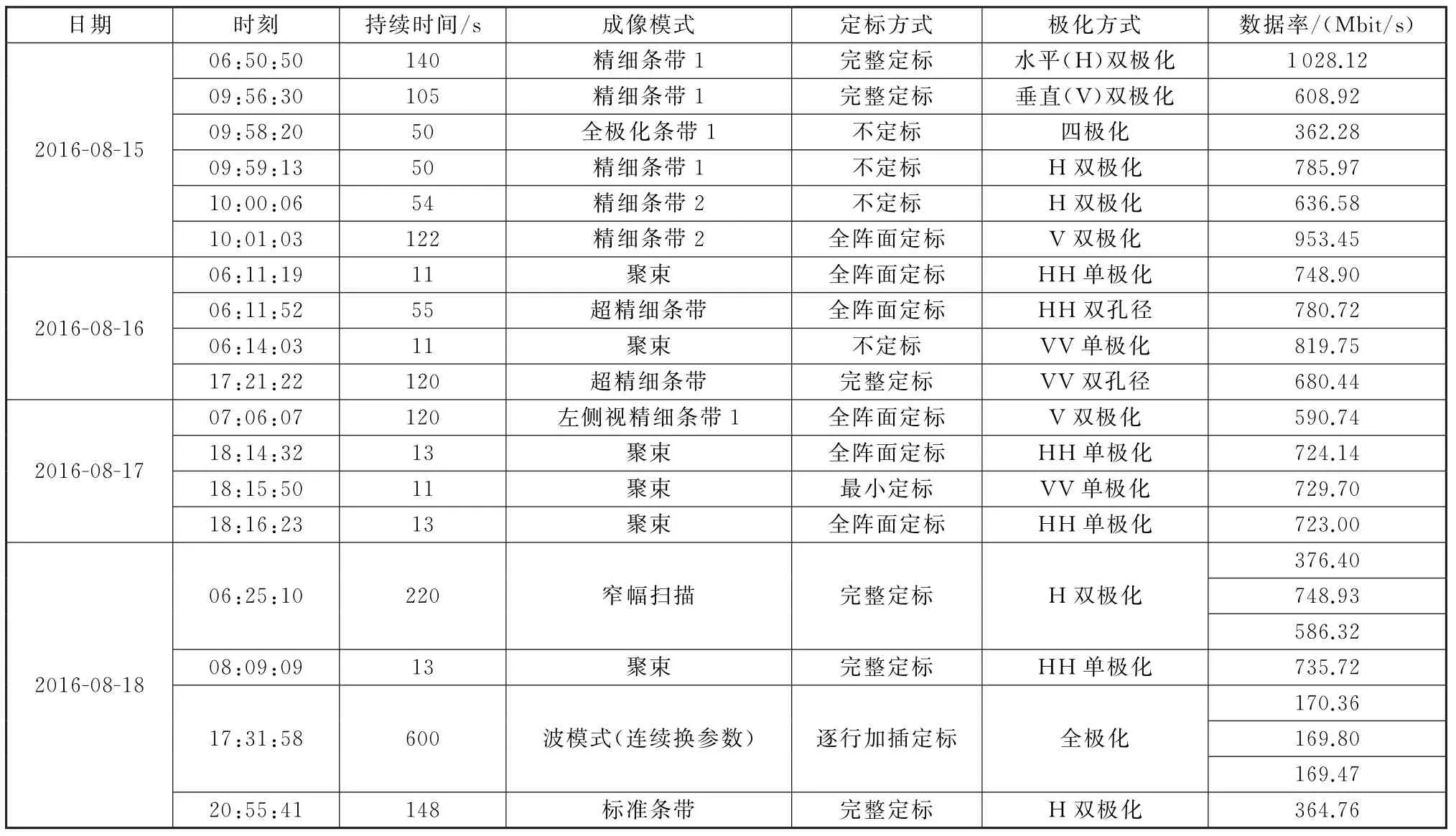
表3 成像模式及主要参数汇总Table 3 Imaging modes and summary of main parameters
4 结束语
本文根据GF-3卫星特点,重点针对飞行程序中太阳翼和SAR天线的展开进行设计和分析。GF-3卫星在轨测试结果表明:卫星运行稳定,所有工程测试指标均符合设计要求,各单机设备状态良好,图像质量良好,能够全面满足用户使用需求,卫星具备长期稳定业务运行的能力。太阳翼和SAR天线展开过程设计合理,尤其是针对SAR天线展开过程的设计,可为其他同类卫星的SAR天线展开设计提供参考。
References)
[1]张逸群,段宝岩,李团结.空间可展开天线展开过程轨迹与控制系统集成设计[J].机械工程学报,2011,47(9):21-28 Zhang Yiqun,Duan Baoyan,Li tuanjie.Integrated design of deployment trajectory and control system for deployable space antennas[J].Journal of Mechanical Engineering,2011,47(9):21-28(in Chinese)
[2]孔祥宏,王志瑾.空间站柔性太阳翼热诱发振动分析[J].振动与冲击,2015,34(5):220-227 Kong Xianghong,Wang Zhijin.Thermally induced vibration analysis of a space station’s flexible solar wing[J].Journal of Vibration and Shock,2015,34(5):220-227(in Chinese)
[3]彭成荣.航天器总体设计[M].北京:中国科学技术出版社,2010:370-374 Peng Chengrong.System design of spacecraft[M].Beijing:Chinese Science and Technology Press,2010:370-374(in Chinese)
[4]朱敏慧.合成孔径雷达天线技术的若干关键问题研究[D].北京:中国科学院电子学研究所,2006 Zhu Minhui.Research on some key problems of synthetic aperture rader antenna technology[D].Beijing:Insititute of Electronics,Chinese Academy of Sciences,2006(in Chinese)
[5]卢有春.S波段SAR在轨测试技术的方案论证与评价[D].成都:电子科技大学,2006 Lu Youchun.Scheme demonstration and evaluation of S-band SAR in-orbit test technology[D].Chengdu:University of Electronic Science and Technology of China,2006(in Chinese)
[6]许国庆.卫星通信有效载荷在轨测试误差分析[J].电讯技术,2009,49(12):81-87 Xu Guoqing.Measurement error analysis for in-orbit test of satellite communication payloads[J].Telecommunication Engineering,2009,49(12):81-87(in Chinese)
Design and On-orbit Verification of GF-3 Satellite Flight Program
ZHANG Hefen YUAN Zhi LIU Cuicui
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
GF-3 satellite are equipped with large SAR(synthetic aperture radar)antennas and large solar wings,so the design of satellite flight program should focus on the deployment of the solar wings,especially the SAR antenna,and the influences of deployment on the whole satellite’s disturbance torque and attitude.The analysis of the solar wing deployment shows that it has a great influence on the satellite attitude angle and attitude angular velocity.Therefore,several failure plans have been prepared for solar wings unlocked happening.By analyzing the dynamic characteristics of SAR antenna deployment and SAR antenna deployment influences on the satellites attitude,the corresponding designs are made,and some measures are adopted to make antenna deployment controllable.GF-3 satellite on-orbit verification results show that the solar wings and SAR antenna deploy well,and the flight program design is reasonable and effective.
GF-3 satellite;fight program;solar wing;SAR antenna
V474.2
A
10.3969/j.issn.1673-8748.2017.06.006
2017-10-20;
2017-11-23
国家重大科技专项工程
张和芬,女,硕士,工程师,研究方向为航天器总体设计。Email:313602829@qq.com。
(编辑:夏光)
猜你喜欢
导航定位学报(2022年2期)2022-04-11
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
学生天地(2020年3期)2020-08-25
导航与控制(2019年2期)2019-06-12
汽车观察(2018年9期)2018-10-23
中学课程辅导·教师通讯(2018年10期)2018-09-04
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中学生数理化·高一版(2017年3期)2017-07-08
