
高分三号卫星测控分系统设计与验证
2017-12-25 06:03涂兰芬刘久利周丽萍杨小勇周波
航天器工程 2017年6期
涂兰芬 刘久利 周丽萍 杨小勇 周波
(北京空间飞行器总体设计部,北京 100094)
高分三号卫星测控分系统设计与验证
涂兰芬 刘久利 周丽萍 杨小勇 周波
(北京空间飞行器总体设计部,北京 100094)
高分三号(GF-3)卫星具有大角度快速机动及复杂电磁环境的特点,测控分系统常规设计难以满足卫星需求。文章提出射频设备的抗干扰设计及验证方法,介绍了GF-3测控分系统的设计、技术特点,并给出了地面试验及在轨运行验证结果,实现了测控分系统高灵敏度接收与大功率合成孔径雷达(SAR)之间复杂环境的电磁兼容性,同时首次采用高精度实时快速导航定位算法和自主健康管理方法,实现了导航子系统快速连续定位。
高分三号卫星;测控分系统;长寿命;电磁兼容性
1 引言
随着空间技术的日益发展,遥感卫星装载的有效载荷呈现出多样化、复杂化的发展趋势,星载合成孔径雷达(SAR)作为一种稳定、高效的SAR图像获取手段受到了世界各国的高度重视,从美国发射全球第一颗SAR卫星——海洋卫星(Seasat)后,各国都分别制定了各自的星载SAR系统计划。
由于SAR载荷是大功率发射设备,以及成像需要卫星经常做大角度机动等特殊要求,SAR卫星的测控分系统具有一些独特的特点。
高分三号(GF-3)卫星测控分系统在实现常规功能的基础上,还进行了与大功率载荷之间的电磁兼容性设计、大角度机动下的高精度定轨和8年长寿命设计:①由于GF-3卫星配备有高功率合成孔径雷达(SAR)载荷以及常规的测控和数传分系统,卫星电磁环境复杂,从设计初期就注重测控设备与大功率SAR的电磁兼容性设计。②为适应SAR载荷成像需求,卫星需要大角度机动,导航接收机从设计上克服了因大角度机动带来可观测导航卫星的频繁更换,导致影响导航接收机捕获、连续定位等问题。③由于卫星对地和对天面相对较小,需要通过射频天线的合理布局、频谱合理分配和设备电磁兼容性设计来保障星上射频系统天线的安装和正常工作。④针对易受空间环境影响的设备,采取差错控制编码纠错技术和单粒子防护设计,提高设备在轨运行的可靠性。⑤采用了高精度实时快速导航定位算法和自主健康管理方法,实现了导航子系统快速连续定位,确保为整星提供连续高精度的测量数据[1]。
本文主要介绍GF-3卫星测控分系统的设计,针对系统设计中的难点提出了解决途径,并通过试验,验证了方法的有效性,可为后续大功率微波遥感卫星的设计提供参考。
2 测控分系统构成
GF-3卫星星上射频设备之间频率多样化、抗干扰能力差异、布局需求不同,各系统需要同时工作,因此测控分系统必须开展系统性设计,加强设备的抗干扰能力,提升系统对卫星大角度机动的适应性。
GF-3卫星测控分系统由统一S频段(USB)测控子系统、导航接收子系统、中继测控子系统三部分组成,测控分系统如图1所示。USB子系统负责提供对地测控通道,完成遥测、遥控和测距功能;同时中继测控子系统作为测控通道的备份,实现地面测控网视距范围外的测控通信,扩展可测控弧段,保障对地测控子系统出现故障时,仍可持续实现对卫星进行监视和控制[2]。导航接收子系统为卫星提供连续高精度测量数据,适应卫星大角度机动状态下,持续提供卫星实时在轨位置、速度信息。
3 测控分系统主要特点
3.1 复杂电磁环境的电磁兼容性设计
测控分系统内部单机既有高灵敏度的接收设备,也有射频发射设备,系统电磁兼容性设计需要保证所有射频收发设备在共同形成的电磁环境中能够正常工作,射频发射机产生的带内和带外发射信号,应不会对射频接收机构成干扰,设计过程中需从发射机与接收机的频谱兼容性着手,分析发射机产生的干扰信号频率是否会与接收机的接收频率、中频等重叠,加强单机设备的抗带外干扰的杂波抑制能力。
为了计算单个发射源和单个敏感装置之间的电磁干扰,应将源函数和传输函数(它由传输函数和天线函数组成)结合起来,以得到在接收机或其他敏感装置处的有效干扰功率,然后,将有效干扰功率与敏感度函数相比较来确定是否存在潜在干扰问题。如果由潜在干扰源在敏感装置处产生的有效干扰功率小于该装置的敏感度阈值,则可保证电磁兼容;相反,如果在敏感装置处的有效干扰功率大于敏感阈值,就会出现电磁干扰。潜在干扰问题可由有效干扰功率与敏感度阈值之差来指示,此差称为干扰余量(Interfernce Margin,IM),如果IIM为正,则存在潜在干扰,如果为负,则几乎没有可能产生干扰[3]。
通过将干扰余量分析理论与实际工程结合,系统的干扰余量计算为
式中:IIM(f,t,d,p)频率f,测试时间点t,干扰源与被干扰源之间距离d,收发天线的相对方向p的函数(dBm);PT(fE)在发射频率fE时的发射功率(d Bm);Lt1为所计算的发射谱相对主谱的衰减值(dB);Lt2为发射系统馈线损耗(包括非设计频率的失配损耗)(dB);Lt/r为收发天线间的隔离度(d B);Lr1为接收天线到低噪声放大器间馈线损耗(包括非设计频率的失配损耗)(d B);Lr2为所计算的接收频率相对于通带的衰减值(dB);PR(fR)为在响应频率fR时的接收机敏感度阈值(d Bm)。
式(1)主要适用于仿真分析,其中Lt1、Lt2、Lr1、Lr2可根据设计方案所提指标或电路分析进行量化估计,Lt/r则根据电磁场计算进行量化估计。
测控分系统内部射频设备包括USB应答机、导航接收机、中继扩频应答机,前期电磁兼容性(EMC)工作是开展测控射频设备与SAR分系统之间的电磁干扰分析,识别出测控系统与SAR系统之间可能存在的干扰,从系统设计方面,优化射频通路及合理天线布局,提高天线间隔离度;从设备设计方面,频率选择时尽量不产生组合频率干扰、交调、互调干扰,合理选择变频策略,使得电路简化,同时获得较好的抗干扰特性;选用合理的元器件及优化增益分布,避免滤波器存在其他工作的频率范围寄生通带,导致影响主频增益和信号解调。同时设计输入端加选频滤波器和低噪声放大后加镜像抑制滤波器,提高接收通道的抗干扰能力;在辐射敏感度、辐射发射方面,对高频及微波电路屏蔽腔采用双层盖板屏蔽,并合理设置固定螺钉的间距疏密,以降低射频信号泄露,提高设备对外界信号的抗干扰能力;在布局布线方面,按信号的特性进行分区,以控制可能的交叉干扰,控制电路板上走线的布局,尽量使其环路面积最小化。
对于星上最大的功率发射源SAR系统,通过仿真分析SAR载荷对外辐射场强,全阵面的叠加效果由方位向和距离向正交叠加合成,仿真分析整阵合成结果为64 d Bm。
根据SAR天线仿真分析结果及卫星天线布局,针对星载系统的隔离度、带外抑制、抗干扰特性提出的要求见表1~表3。
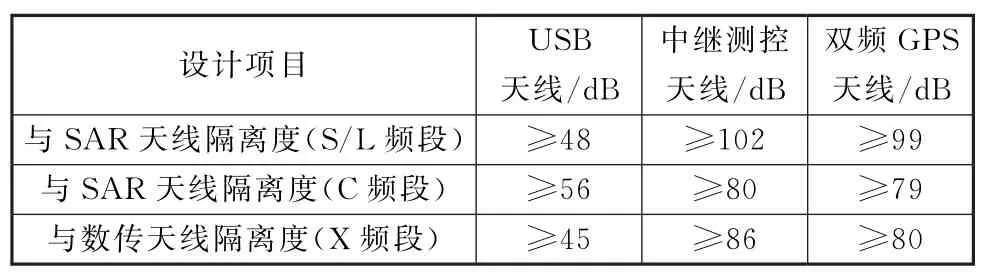
表1 天线隔离度要求Table 1 Antenna isolation demand

表2 带外抑制的要求Table 2 Out-band rejection demand

表3 抗干扰设计要求Table 3 Anti-jamming demand
3.2 适应大角度机动的设计
由于GF-3卫星姿态存在大角度机动,测控分系统承担着卫星遥控、遥测及卫星高精度定位等关键任务,卫星机动过程中对测控信道以及导航接收机连续测量造成影响,是系统设计中关键环节,因此系统设计过程中对测控天线的布局及观测特性进行优化设计,同时对导航接收机采用高精度实时快速导航定位算法和自主健康管理方法,实现了导航系统快速连续定位。
1)天线观测特性的系统分析
测控天线的观测特性与天线选型、天线布局、天线组阵形式都有着密切的关系,考虑到测控天线产品类型众多、组阵形式多样,系统设计是采用仿真加实测相结合的方式对测控天线进行综合分析,分析过程中重点关注不同的天线类型和组阵形式在星体上的效果,同时对关键的腰部区域的覆盖特性进行比对,优选最佳设计方案。
USB测控天线比对如下:①锥柱螺旋天线反旋组阵,如图2所示;②锥柱螺旋与四臂螺旋同旋组阵,如图3所示;③四臂螺旋天线同旋组阵,如图4所示;④锥柱螺旋同旋组阵,如图5所示。
通过对不同类型天线及组阵形式比对分析得出结论如下:①反旋组阵条件下,由于腰部区域的极化特性不理想,无法在对地方向90°以外获得平稳的覆盖,存在较多的干涉凹点,而且在卫星姿态机动过程中,地面需根据天线的极化形式进行切换,增加了后续在轨维护的难度,不建议采用;②采用四臂螺旋天线同旋组阵和锥柱螺旋与四臂螺旋同旋组阵两种,尽管天线波束较宽,但是干涉区范围较大,且方向图起伏较大,干涉区能量相对较高。由于四臂天线对星体比较敏感,要求架设高度较高,卫星星体布局无法满足,因此均不建议采用;③采用锥柱螺旋天线同旋组阵状态干涉区范围小,方向图起伏较小,干涉区能量相对较低,考虑该干涉区的影响存在于覆盖区边缘,对于边缘区的影响,系统开展了测控链路失锁测试,卫星在轨实际接收电平为中强电平,地面采用相对恶劣条件进行测试时,卫星上行信号失锁时间仅为6 s,对于实际在轨使用不影响,后续在轨实际接收时,卫星在任何机动状态下,都未发生失锁现象,因此该方案是最佳设计[4]。
2)适应卫星机动的快速定位算法
测控分系统中导航子系统承担着为卫星提供高精度定位、定轨数据,由于卫星大角度姿态机动,导航接收机处于高速运动状态,视野内可见导航卫星切换十分频繁,因此导航接收机容易出现失锁现象,一旦在轨发生定位中断,再次恢复定位时,导航接收机只能采用盲捕方法对所有导航卫星进行轮询捕获搜索,造成测量数据中断,影响卫星测量精度。因此保证导航接收机的连续定位及测量精度是导航子系统一个设计难点,GF-3卫星导航接收机采用一种快速高精度导航定位算法,运用卫星定位、姿态数据辅助导航子系统快速捕获导航星的策略,实现了为卫星提供实时高精度连续的测量数据[5]。
导航接收机快速高精度导航定位算法,是利用外部的定位数据及姿态数据计算导航卫星的仰角,并预测不同历元时刻导航接收机视野内的可见导航卫星。该方法主要步骤如下。①计算概略位置:导航卫星的位置和速度通过导航历书计算,导航历书预存在接收机中,并间隔固定时间进行更新。②计算仰角:在每个历元时刻,计算从导航接收机当前位置及每颗导航卫星的仰角。③估计可见性预报:根据导航星仰角判断当前时刻每颗导航卫星是否可见,并按照可见的可能性大小,对所有导航卫星的搜索捕获顺序进行排序。④捕获配置:在导航接收机中,根据优化后的导航卫星搜索捕获顺序进行捕获跟踪,减少搜索捕获时间。
由于卫星高速运行过程中存在多普勒效应,因此导航接收机捕获范围设置为±50 k Hz,搜索频点步长设置为500 Hz,但是如果导航接收机采用定位、姿态数据辅助捕获算法,多普勒搜索范围将缩小为±6 k Hz,从开始捕获卫星到帧同步,实现接收机定位时间缩短了10 min,而由于导航接收机跟随卫星姿态实时计算卫星粗略位置和速度,实现对导航星接收的可见性预报,保证了导航接收机能够在卫星大角度机动的恶劣条件下,实时捕获导航卫星,为卫星获取高精度的测量数据提供保障。根据实际在轨的测试数据表明,由于采用了此算法,导航接收机在卫星任何机动状态下,都未出现数据中断异常现象。
3.3 系统基于自主诊断的可靠性设计
导航子系统需要完成信号的捕获、跟踪、利用星历参数计算出卫星在某一时刻的空间位置,利用这些测量数据进行导航定位计算,确定卫星当前的运动状态和时间信息。星载系统内部的算法处理及模型需要依赖于大容量计算芯片实现,可是大容量计算芯片容易受空间环境影响,产生单粒子翻转效应,因此在单机设计过程如何实现自适应故障诊断、快速自主恢复同样是设计难点。GF-3卫星导航子系统从采用差错控制编码纠错技术、软件自主诊断及恢复、单粒子防护三方面进行优化设计。
1)差错控制编码纠错技术
错误检测与纠正(EDAC)技术是一种信息冗余容错技术,基于差错控制编码的基本思想,若存储器出现单粒子翻转(SEU),故障导致存储器中的某位数据翻转,可以对静态随机存取存储器(SRAM)中的数据完成检错与纠错功能。
导航接收机中通道板和轨道接口板均装配有EDAC SRAM芯片作为数字信号处理器(DSP)的外部SRAM使用,用于消除SRAM中出现的单比特错误对程序的影响。系统上电后先对EDAC SRAM进行配置,开启自动纠错,实现了单比特纠错、双比特检错。而且无论在系统开机加电,还是复位加电的过程中,DSP均先对EDAC SRAM进行配置,再进行读写操作。
2)软件自主诊断及恢复
软件内部具备在轨运行自主监控,当软件出现异常时,根据软件内部设置的不同判决条件,进入不同软件处理分支,对软件故障进行逐步处理,提升单机在轨自主恢复能力,同时在软件出现的异常无法自主恢复时,由卫星数管分系统根据故障判决条件,自主进入故障处理流程[6]。在轨运行自主诊断及恢复措施如下。
(1)当通道板出现连续非定位、堆栈溢出、计算超差等方面异常时,软件自主进入异常处理分支,启动软件自主复位措施,轨道接口板当出现定轨发散、解算任务超时、定位外推等方面异常时,软件自主进入处理异常分支,启动软件自主复位措施。
(2)轨道接口软件判断接收机是否处于通道板定位,但定轨模块未实时滤波的状态。当接收机处于该状态时,表明前端通道板定位与定轨模块状态不吻合,软件运行出现异常,按异常自主处理流程依次采取定轨模块初始化、通道板复位、接口软件复位等措施,使接收机恢复正常。
(3)整星在导航接收机正常开启,且总线交互状态正常时,监测接收机遥测数据是否持续更新、轨道接口软件关键遥测参数是否正常、接收机工作状态遥测是否有异常错误标记,当以上现象出现任何一种,卫星数据分系统将自主启动异常处理策略。
3)抗单粒子翻转
导航接收机内部的器件有多种单粒子敏感器件,包括DSP/CPU、SRAM/FLASH、SRAM型FPGA等,对以上单粒子翻转敏感器件单机采用SEU防护设计,主要防护措施如下。
(1)DSP/CPU器件SEU防护措施:在程序加载时,采用引导区双备份、程序区三备份的措施。即使引导区或程序区被单粒子打翻,可通过加载软件对应用软件三取二来确保软件的正确加载。程序运行过程中对重要参数和变量采用三模冗余(TMR),同时监控关键参数,一旦发生异常,及时检测并进入异常处理分支。
(2)SRAM/FLASH器件SEU防护措施:导航接收机中的SRAM使用了具有EDAC功能的SRAM芯片,该芯片具有EDAC电路,可对内部存储的数据进行检测,在检查到数据发生单粒子翻转后进行指示,并可将单比特单粒子翻转错误进行自动纠正;同时采用运行程序三备份和关键参数三备份的防护措施。
(3)SRAM型FPGA器件SEU防护措施:SRAM型FPGA主要实现GPS信号捕获、跟踪与测量功能,导航接收机内部使用两片FPGA,分别获取模拟数字转换器1(ADC1)和ADC2的数字中频信号。两片FPGA互为备份关系,通过DSP控制反熔丝FPGA实现对Xilinx FPGA的加载、回读与重配置。反熔丝FPGA完成两片Xilinx FPGA的加载后,实时回读Xilinx FPGA的配置内容,并与可编程只读存储器(PROM)中的数据进行比对,侦测到SEU故障,由DSP控制反熔丝FPGA对Xilinx FPGA进行重配置,消除SEU故障。
4 试验验证
1)复杂环境下电磁兼容设计验证
测控分系统复杂电磁环境兼容性设计从单机、系统多个角度进行验证,同时在卫星研制各阶段也开展试验验证,验证采用逐层迭代趋近的验证方法,测试结果见表4~表6。
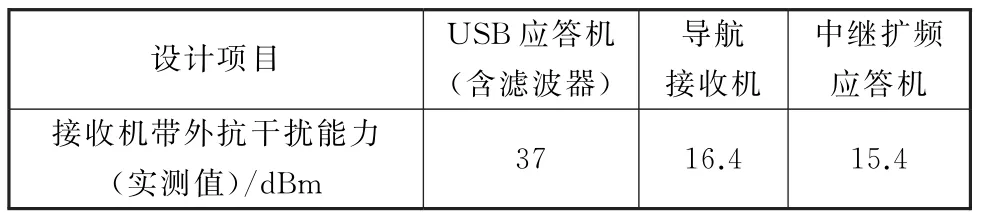
表4 测控射频设备抗干扰能力测试Table 4 Anti-jamming test result for TT&C
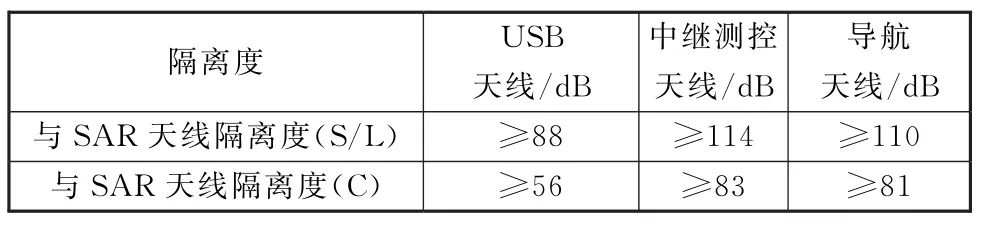
表5 测控天线与SAR天线间隔离度测试Table 5 Antenna isolation test result

表6 EMC兼容性测试结果Table 6 EMC compatibility test result
测试结果表明:平台与SAR载荷之间可以兼容工作,并保证系统有6 dB以上兼容余量。
2)快速实时定位算法在轨试验验证
对导航子系统在轨测量精度的评估,通过导航接收机的实时原始观测数据进行精密轨道评估,同时以事后精密定轨数据作为理论文件,分析实时的定位数据精度[7]。
精密轨道精度采用相邻两天定轨弧段重叠的6 h轨道做差异统计,轨道精度都在轨道切向、法向、径向三个方向上统计。位置差异在切向、法向、径向和三维上的平均值分别是9.8 mm、13.4 mm、7.3 mm和18.7 mm,速度差异在切向、法向、径向和三维上的 平 均 值 分 别 是0.008 2 mm/s、0.006 6 mm/s、0.008 7 mm/s和0.014 0 mm/s。
其中,精密轨道每天6 h重叠位置差异序列如图6所示,其最大值不超过4 cm。
其中,精密轨道每天6小时重叠速度差异序列如图7所示,其最大值不超过0.025 mm/s。
通过分析在轨实时定位数据,对比精密定轨数据(见图8),在轨实时定位精度优于3.05 m(三轴,1σ),满足实时定位精度≤10 m(三轴,1σ)的指标要求。
5 结束语
GF-3卫星测控分系统设计过程针对微波遥感卫星的特点,进行系统设计改进,在平台布局空间受限、设备发射功率大、接收灵敏度高、卫星姿态变化多样的前提下,充分考虑卫星特殊需求和应用特点,采用仿真和试验相结合方式,初期合理卫星布局,优化设备抗干扰能力和系统的可靠性设计,后期开展试验验证,通过测试,验证了测控分系统与SAR载荷电磁兼容性满足工程6 d B余量,导航子系统在轨实时测量精度优于3.05 m,满足10 m需求。本文的设计思路及测试结果,经过在轨系统稳定可靠运行已得到验证,可以为后续大角度机动及复杂电磁环境的卫星提供技术借鉴。
References)
[1]彭成荣.航天器总体设计[M].北京:中国科学技术出版社,2011 Peng Chengrong.System design for spacecraft[M].Beijing:China Science and Technology Press,2011
[2]陈宜元.卫星无线电测控技术[M].北京:中国宇航出版社,2007 Chen Yiyuan.Satellite tracking and command technology[M].Beijing:China Astronautics Press,2007(in Chinese)
[3]陈淑凤.航天器电磁兼容技术[M].北京:中国科学技术出版社,2007 Chen Shufeng.Spacecraft EMC technology[M].Beijing:China Science and Technology Press,2007(in Chinese)
[4]刘嘉兴.飞行器测控通信工程[M].北京:国防工业出版社,2010 Liu Jiaxing.Spacecraft TT&C communication engineering[M].Beijing:National Defense Industry Press,2010(in Chinese)
[5]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009 Xie Gang.Principles of GPS and receiver design[M].Beijing:Publishing House of Electronics Industry,2009(in Chinese)
[6]谭维炽,胡金刚.航天器系统工程[M].北京:中国科学技术出版社,2009 Tan Weichi,Hu Jingang.Spacecraft system engineering[M].Beijing:China Science and Technology Press,2009(in Chinese)
[7]李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009 Li Zhenghang,Zhang xiaohong.New techniques and precise data processing method of satellite navigation and positioning[M].Wuhan:Wuhan University Press,2009
Design and Verification of TT&C Subsystem for GF-3 Satellite
TU Lanfen LIU Jiuli ZHOU Liping YANG Xiaoyong ZHOU bo
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
GF-3 satellite has the characteristics of a large angle attitude maneuver and complex electromagnetic environment,conventional TT&C subsystem design is difficult to meet the satellite design requirement.The design and verification method of anti-jamming of radio frequency equipment is presented.The design,technical characteristics,ground experiment and verification results of GF-3 TT&C subsystem are introduced.The complex electromagnetic compatibility(EMC)between high sensitivity TT&C subsystem and high power SAR system is realized.At the same time,it is the first time to using the real-time positioning algorithm and self-health management to achieve the navigation subsystem fast and continuous positioning.
GF-3 satellite;TT&C subsystem;long life;EMC
TN959.6
A
10.3969/j.issn.1673-8748.2017.06.019
2017-10-20;
2017-11-20
国家重大科技专项工程
涂兰芬,女,高级工程师,从事航天器通信系统设计工作。Email:tlf_cast@126.com。
(编辑:李多)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
中国船检(2020年11期)2020-11-27
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
电子技术与软件工程(2018年10期)2018-07-16
山东工业技术(2016年15期)2016-12-01
