
四履带张紧器履带夹紧控制系统及其控制方法
2017-12-24 13:28蒋晓波袁中超万箭波李怀亮冯天贺
石油工程建设 2017年6期
单 悦,蒋晓波,袁中超,万箭波,李怀亮,王 徽,冯天贺
1.天津水泥工业设计研究院有限公司,天津 300400
2.天津市精研工程机械传动有限公司,天津 300409
3.海洋石油工程股份有限公司,天津 300451
四履带张紧器履带夹紧控制系统及其控制方法
单 悦1,蒋晓波2,袁中超2,万箭波2,李怀亮3,王 徽2,冯天贺2
1.天津水泥工业设计研究院有限公司,天津 300400
2.天津市精研工程机械传动有限公司,天津 300409
3.海洋石油工程股份有限公司,天津 300451
四履带张紧器是深海脐带缆铺设系统中的关键设备,履带夹紧控制技术又是张紧器的核心技术。结合已设计的85 t四履带张紧器履带夹紧机构的机械和液压方案,配套设计了履带夹紧机构控制系统及其控制方法。陆地动负荷试验数据表明,85 t四履带张紧器四条履带的夹紧液压油缸工作压力实测值均达到了预期设计要求,可以实现四条履带对脐带缆的恒定夹紧力控制;在应用85 t四履带张紧器协同卷轴安装系统完成海底管道上卷至滚筒工作的海上试验中,实现了对管径6 in管道的上卷与铺设,进一步验证了履带夹紧控制系统的性能。
四履带张紧器;履带夹紧机构;控制系统;控制方法
随着我国海洋石油的开采由浅海向深海的战略转移,为了提高我国深海管道与缆线的铺设能力,中海油深海开发有限公司牵头承担了国家十二五科技重大专项“南海深水油气开发示范工程”项目,为配合荔湾3-1气田工程设计、建造、安装技术的实施,研制出一种具有自主知识产权的深水脐带缆铺设用四履带张紧器[1],打破了国外技术的垄断,缩小了与国际深水油气工程水平的差距,填补了国内空白,摆脱了张紧器设备对国外的依赖,对推动我国深海油气开发具有重要的理论意义和经济价值[2-3]。
在深海铺设深水脐带缆作业中应用的四履带张紧器,均采用四条履带相连的液压油缸伸缩机构实现对脐带缆的恒定压力夹紧。在四履带张紧器工作时,需要控制每条履带将脐带缆夹持在履带中心位置,并实现恒定压力的夹持[4]。本文以85 t四履带张紧器为模型,在介绍了已设计的履带夹紧机构与工作过程的基础上,论述了配套的履带夹紧机构控制系统及控制方法的设计方案,并给出了通过85 t四履带张紧器工程样机的开发应用进行功能验证的结果。
1 已设计的四履带夹紧机构与工作过程
85 t四履带张紧器工程样机的夹紧功能,系由上履带1、右履带3、下履带5和左履带7共4条履带共同实现的,履带夹紧总体结构见图1。
上履带1的夹紧动作由与履带连接的夹紧液压油缸执行,上履带夹紧液压油缸2的油缸座与框架固定连接,液压油缸缸杆与履带固定连接,上履带配置了4个液压油缸,每个液压油缸的大腔均配置了压力传感器,每个液压油缸还配置了位移传感器。其他3条履带的结构与上履带结构一致。在四履带张紧器工作时,需要每条履带将脐带缆夹持在履带中心位置,并实现恒定压力夹持,然后通过控制履带的正反向驱动,自动实现恒张力条件下脐带缆沿船舶航迹铺设,同时根据船舶的行驶状态,自动实现收放脐带缆工作。

图1 85 t四履带张紧器总体履带夹紧机构
2 配套的四履带夹紧控制系统及控制方法设计
2.1 夹紧控制系统设计
(1)液压控制。根据85 t工程样机的总体履带结构,为了适应海上脐带缆铺设过程中风浪流的扰动,提高系统的响应速度,每条履带夹紧液压油缸的液压控制均为独立控制,液压油缸的控制原理见图2。每条履带夹紧液压油缸配置了控制油缸伸缩的电磁阀SSV01和SSV02,增减压力的电磁阀SSV03和SSV04,同时也配置了压力传感器PT01和位移传感器DT01,除此之外还配置了相关的蓄能器、安全阀、平衡阀等配套液压元件。
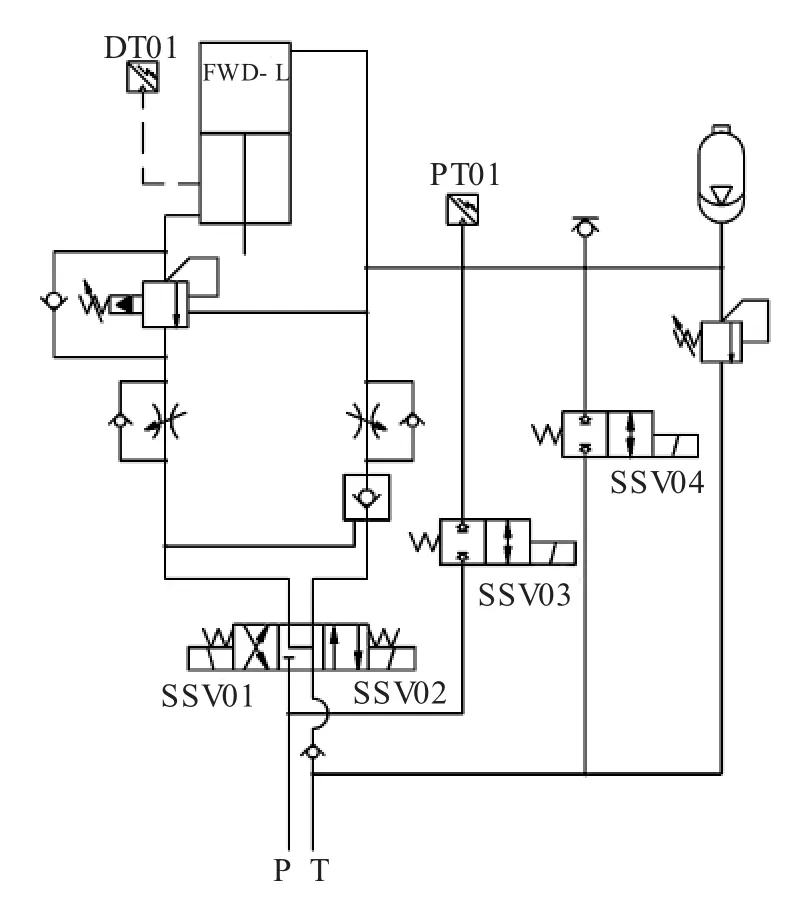
图2 单条履带夹紧液压油缸控制原理示意
(2)电控方案。四履带张紧器结构复杂,空间紧凑,履带夹紧被控对象众多,电气信号分布广,每条履带配置的电液信号数量均为电磁阀16个、压力传感器4个、位移传感器4个。如果采用集中控制,现场布线工作过于繁琐,不仅调试故障点增多,而且信号经过长距离传输也容易产生干扰。因此四履带张紧器的电控方案采用分布式模块化控制方式,在上下左右四条履带上设计现场分布式控制柜,通过现场总线与主操作控制柜进行数据通信,共同协调完成张紧器的履带夹紧控制工作。张紧器履带夹紧的分布式模块化控制方案见图3。
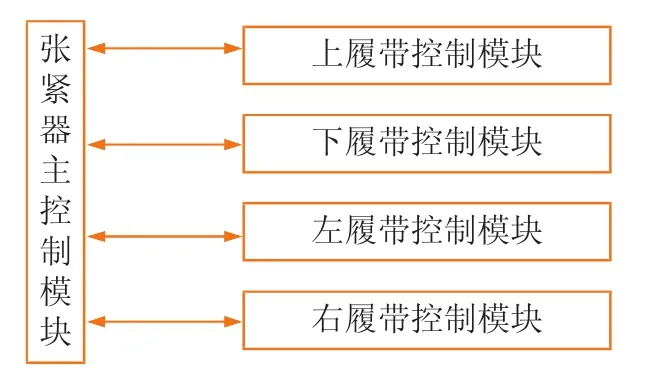
图3 张紧器履带夹紧的分布式模块化控制方案
(3)主控制模块。张紧器工程样机主控制模块采用的CPU选用CPU317-2DP处理器,它具有大容量程序存储器和2个PROFIBUS-DP主站/从站接口,可用于大规模I/O配置和建立分布式I/O结构,其中一个DP与其他从控制模块通讯,另一个DP与HMI通讯。人机界面HMI采用普洛菲斯公司的 GP-4501T。履带控制模块选用 ET200M,ET200M是一款高度模块化的分布式I/O系统,它使用S7-300可编程序控制器的信号模块、功能模块和通讯模块进行扩展。
2.2 夹紧控制方法设计
在脐带缆铺设过程中,海上风浪流的影响直接作用在脐带缆上,导致脐带缆在铺设过程中不规则地波动,这对于铺设海底脐带缆的四履带张紧器来讲,不但需要控制每条履带的夹紧液压油缸,以实现同步夹持定位动作,同时还需要在夹持管道后,保证每个夹紧液压油缸的压力稳定在脐带缆可以承受的范围之内。简单的位移闭环同步方式或压力闭环同步方式可以很好地实现同步效果,但无法迅速有效地消除扰动,达不到理想的控制效果。针对四履带张紧器的特殊工况,在85 t四履带张紧器工程样机研制中采用了下述的履带夹紧控制方法,履带夹紧控制流程如图4所示,具体控制过程为:
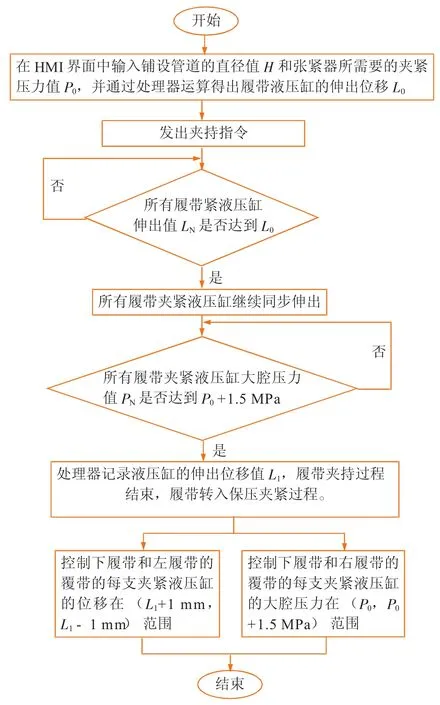
图4 履带夹紧控制流程
(1)预先在PLC控制器程序中设定履带框架的机械结构尺寸值H0以及计算公式;在脐带缆铺设前,需先将脐带缆牵引至张紧器内,至少需保证履带可以完整与脐带缆接触,按照实际铺设工艺要求,通过人机交互界面输入所铺设管道的直径值H和张紧器每条履带所需要的夹紧压力值P0;通过公式计算,可以得出张紧器每条履带夹紧油缸的伸出位移值L0。
(2)操作者发出夹持指令,四条履带的夹紧液压油缸同时执行伸出动作,所有夹紧液压油缸的伸出距离达到L0后,完成履带夹紧的初步定心动作。
(3)四条履带的夹紧液压油缸继续同时加压伸出,直至所有夹紧液压油缸的大腔压力值达到夹紧压力值P0+1.5 MPa,此时完成了履带夹持管道动作。
(4)PLC控制器记录下每支液压油缸的实际伸出位移值L1,在履带夹持动作完成后,通过对下履带和左履带两者的夹紧液压油缸,进行在(L1+1)mm和(L1-1)mm之间的恒定位移控制;对上履带和右履带两者的夹紧液压油缸,进行压力在P0和P0+1.5 MPa之间的恒定压力控制,实现四履带张紧器履带夹紧的自动保压调节动作过程。
3 工程应用验证
85 t四履带张紧器在工厂完成了安装调试工作,在中国船级社监督下进行了张紧器陆地功能与性能试验,以验证研制的85 t四履带张紧器是否达到研制目标。陆地动负荷试验数据见表1。在完成陆地试验后,85 t四履带张紧器随后安装在长城1驳船上,协同卷轴安装系统于2015年6月13日在海工码头完成了将长120 m、管径6 in(1 in=25.4 mm)海底管道上卷至滚筒的工作,并于6月14日随滨海108船进入JZ25-1S海域,18日完成了卷轴安装系统的海试任务,海上试验现场照片见图5,动负荷试验数据见表1。

图5 85 t四履带张紧器海上试验

表1 动负荷试验数据
4 结论
(1)陆地动负荷试验数据表明,85 t四履带张紧器四条履带的夹紧液压油缸工作压力实测值均达到了预期设计要求,可以实现四条履带对脐带缆的恒定夹紧力控制。
(2)在85 t四履带张紧器协同卷轴安装系统完成海底管道上卷至滚筒工作的海上试验中,实现了对管径6 in海底管道的上卷与铺设,进一步验证了履带夹紧控制系统的性能。
[1]孙晶晶,刘培林,段梦兰,等.深水脐带缆安装技术发展现状与趋势[J].石油矿场机械,2011,40(12):1-5.
[2]万箭波,王福山,王海玲,等.四履带张紧器恒张力控制建模与仿真[J].石油矿场机械,2016,45(6):26-30.
[3]ZHANG Junliang,LIN Li,ZHANG Shimin.A tensioner system for a deepwater pipelaying vessel[C]//2009 International Conference on Measuring Technology and Mechatronics Automation.[s.n.],China:Zhangjiajie,[s.n.],2009:36-39.
[4]郭志平,李冠孚,刘仕超,等.四履带式海洋船用脐带缆张紧器设计[J].机械设计与制造,2013(8):266-268.
Track clamping system and controlmethod of four-track tensioner
SHAN Yue1,JIANG Xiaobo2,YUAN Zhongchao2,WAN Jianbo2, LIHuailiang3,WANG Hui2,FENG Tianhe2
1.Tianjin Cement Industry Design and Research Institute Co.,Ltd.,Tianjin 300400,China
2.Tianjin Jingyan Construction Machinery Transmission Co.,Ltd.,Tianjin 300409,China
3.Offshore OilEngineering Co.,Ltd.,Tianjin 300451,China
The four-track tensioner is a key equipment in the installation system of deepwater umbilical laying,the track clamping control technology is the core of the tensioner.By combining the mechanical design scheme and the hydraulic design scheme of 85 t four-track tensioner,the matching track clamping system and its control method of the four-track tensioner are presented.The land dynamic load test of the tensioner proves the working pressures of the four clamping hydraulic cylinders reach the design requirement and can realize constant clamping force control between the four tracks and the umbilical.The offshore test of rolling up a 6 inch subsea pipeline to the roller and than laying by coordinately using the tensioner and the reelinstalling system is successful,which further verifies the working reliability of the track clamping system.
four-track tensioner;track clamping system;controlsystem;controlmethod
10.3969/j.issn.1001-2206.2017.06.011
国家科技重大专项项目子任务“脐带缆安装系统关键部件(A&R绞车)研制”(2011ZX05056-003-07);天津市科技计划项目“恒张力控制技术研究与装备产业化”(14ZCDZGX00069)。
单 悦(1979-),女,天津人,高级工程师,2002年毕业于大连海事大学电气控制专业,现主要从事电气控制系统设计与开发。Email:shanyue_tj@163.com
2017-06-20
猜你喜欢
客车技术与研究(2022年5期)2022-10-29
装备制造技术(2021年4期)2021-08-05
中国石油石化(2021年8期)2021-03-30
中国生殖健康(2020年2期)2021-01-18
石油化工建设(2019年6期)2020-01-16
健康博览(2019年10期)2019-12-02
中国生殖健康(2018年2期)2018-11-06
汽车维修技师(2018年2期)2018-07-07
石油化工建设(2017年2期)2017-06-05
柴油机设计与制造(2015年4期)2015-11-23
