
TLP平台张力腿干涉分析研究
2017-12-24 13:28:07尹汉军黄怀州
石油工程建设 2017年6期
尹汉军,黄怀州,刘 钊
海洋石油工程股份有限公司,天津 300452
TLP平台张力腿干涉分析研究
尹汉军,黄怀州,刘 钊
海洋石油工程股份有限公司,天津 300452
为验证相邻张力腿在安装阶段和在位阶段是否发生碰撞干涉,需进行张力腿干涉分析。采用FLEXCOM和SHEAR7软件,在考虑VIV效应和尾流效应的情况下,对某油田有4个立柱、每个立柱有2根张力腿的平台进行了安装阶段和在位阶段的干涉分析。结合张力腿海上安装方案,选取张力腿T8和T1、T2和T3完成绑扎布置之后处于自由站立状态作为典型工况进行分析,结果表明,此张力腿布置满足施工和在位干涉分析要求。最后指出,在设计过程中,如果张力腿发生干涉现象,可通过调整临时浮筒尺寸、绑扎布置或增加扰流装置以降低VIV效应等手段来消除干涉。
张力腿;干涉分析;绑扎;涡激振动;尾流
随着海上油气的开发向深海发展,张力腿平台(TLP)受到了人们的广泛关注。在深海油气田开发过程中,由于TLP具有运动性能好、抗恶劣环境作用能力强、造价低等优势,日益成为深海油气田开发的主要结构形式。张力腿(Tendon)主要用于系泊张力腿平台,实现平台在设计环境条件下的生产功能需求。张力腿系泊系统需提供足够的刚度保证平台的升沉、横摇和纵摇频率远离波浪能量集中频率范围(1/2~1/5 Hz),从而避免谐振响应[1]。
张力腿平台每个立柱(或延伸腿)底部通常安装2根或更多根张力腿,张力腿总数通常为6~16根。张力腿钢管通常为常压,除去顶部和底部连接器外,全长范围可以采用一致或者变化的外径和壁厚。每根张力腿由顶部连接段、底部连接段和主体分段(包含中间耦合连接器)组成。张力腿顶部节点将张力腿与船体悬挂系统(Porch)相连,同时配备张力腿张力的监测系统。主体分段贯穿整个水深与底部节点相连,底部节点将张力腿与底部基础连接。张力腿典型布置如图1所示。

图1 张力腿典型布置方案
由于受到外界环境条件、TLP平台偏移以及涡激振动(VIV)效应的影响,张力腿会发生垂直于长度方向的偏移。为保证安装阶段和在位阶段张力腿底部和顶部转角在允许最大转角范围之内,以及相邻张力腿之间不发生干涉,在设计阶段需对其进行分析。张力腿干涉分析的主要目的为:
(1)校核相邻张力腿之间是否发生干涉。
(2)校核张力腿底部和顶部转角是否满足要求。
(3)确定和核实临时浮筒(TSB)尺寸。
(4)确定张力腿绑扎(Tie-back)布置方案。
(5)确定是否需要VIV抑制装置及布置方案。
1 张力腿干涉分析理论
在进行张力腿干涉分析时,需要考虑张力腿的涡激振动(VIV)效应引起的拖曳力增大。同时,由于同一角上的两根张力腿之间距离较近,也需考虑下游张力腿尾流效应(Wake Effect)的流速折减。因为位于来流方向上的两根张力腿,其下游张力腿位于上游张力腿的尾流场中,由于尾流的遮蔽效应,下游张力腿受到海流的拖曳力总是小于上游张力腿所受的拖曳力,这使得两根张力腿有相互靠近的趋势,同时涡激振动(VIV)效应又进一步加大了这种趋势[2]。
1.1 涡激振动效应
从流体的角度分析,任何非流线型物体,在一定的恒定流速下,都会在物体两侧交替地产生脱离结构物表面的漩涡[3]。对于海洋工程上普遍采用的圆柱形断面结构物,这种交替发放的泻涡又会在柱体上生成顺流向(In-line)和横流向(Cross-flow)周期性变化的脉动压力[4]。如果此时柱体是弹性支撑的,或者柔性管体允许发生弹性变形,那么脉动流体力将引发柱体(管体)周期性振动,这种规律性的柱状体振动反过来又会改变其尾流的泻涡发放形态。这种流体-结构物相互作用问题称为涡激振动(Vortex-Induced Vibration:VIV)[5]。
TLP平台区域水深较深,其海流速度较浅水区要大得多,同时,随着管体长度的增加,张力腿的固有频率降低,较小量级的海流作用就可能引发张力腿涡激振动。张力腿涡激振动响应幅值和频率一般取决于海流特征、结构密度、长细比、阻尼比、折减速度和雷诺数等因素。
研究表明,涡激振动会增大张力腿的拖曳力系数,从而增大张力腿的拖曳力,使其变形增大。因此在进行干涉分析之前,首先应针对张力腿进行VIV分析,确定拖曳力放大系数。根据文献OTC 4490,VIV引起的拖曳力放大系数可采用下式进行计算[6]:

式中:Cd为拖曳力系数,无量纲;CD0为静止的圆柱体拖曳力系数,无量纲;YRMS为由于VIV振动引起的张力腿某一位置处的均方根位移,m;D为圆柱体外径,m。
1.2 尾流效应
两个相邻张力腿,当上游张力腿受到来流作用时,由于上游张力腿的屏蔽作用,下游流场会发生变化,使得下游流场在一定范围内,流速要小于来流流速,这种现象称之为尾流效应(遮蔽效应)。由于尾流效应的存在使得上游张力腿变形大于下游张力腿变形,当两根张力腿距离较近时,存在张力腿之间发生干涉的风险[7]。
模拟尾流的方式一般有三种:一是计算流体动力学模型,二是参数化的尾流场模型(HUSE模型),三是参数化的平均拖曳力模型(BLEVIN模型)。计算流体动力学模型能够实现上下游立管在来流中的模拟,但是由于流固耦合计算量巨大,在目前的工程应用中很难实现。HUSE模型由于计算流程简单,尤其对于两根圆形结构物组成的系统,而且具有不用通过模型试验来获得作用力系数和可直接应用于有限元静态分析工具的优点,在工程上得到了大量的应用。
参数化尾流场模型是一个基于半经验的静态尾流公式,该公式用于分析在稳流场中结构物之间的干扰。该模型由HUSE在上世纪八、九十年代基于Schichting提出的湍流尾流分析公式提出的[8-10]。HUSE尾流场模型如图2所示。
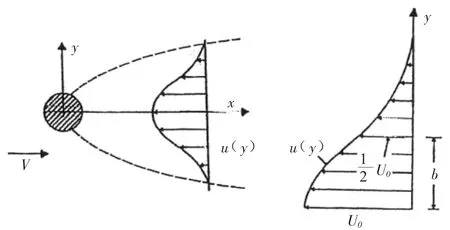
图2 HUSE尾流场模型
其中尾流亏损速度为


尾流场中的真实流速为
式中:u为分析点的尾流亏损速度,m/s;U0为尾流中心亏损速度,m/s;y为尾流场中垂直于来流方向上分析点与上游圆柱体轴心的垂直距离,m;b为尾流半带宽,m;k1,k2为常数,无量纲,对于光滑立管k1=0.25,k2=1.0;V为来流速度,m/s;xs为考虑了上游圆柱体的影响,用于尾流亏损速度计算的在来流方向上与上游圆柱体轴心的分析距离,m;x为尾流场中在来流方向上与上游圆柱体轴心的实际距离,m;Vwake为尾流场中的真实流速,m/s。
2 基于FL EXCOM的张力腿干涉分析
本文选取某油田张力腿平台进行研究,此张力腿平台共有4个立柱,每个立柱有2根张力腿,2根张力腿顶部轴线之间横向和纵向间距均为6.33 m,张力腿直径为1.016 m(40 in)。该油田范围平均水深为400 m,一年一遇台风条件下表层流速为1.57 m/s,十年一遇台风条件下表层流速为1.85 m/s,百年一遇台风条件下表层流速为2.49 m/s,千年一遇台风条件下表层流速为2.80 m/s。
张力腿的干涉分析包括施工工况的干涉分析和在位工况的干涉分析。施工干涉分析的工况需要考虑具体的海上作业流程,并结合张力腿绑扎布置的情况和施工作业持续期等。在位干涉分析的工况必要的话还要考虑平台的偏移等。
在分析中将TLP的张力腿简化为一竖直的梁结构[11],对于涡激振动效应引起的拖曳力系数放大,采用SHEAR7软件进行分析,然后导入到FLEXCOM中分析张力腿的实际变形情况。对于尾流效应,采用FLEXCOM的WAKE INTERFERENCE模块自动分析下游张力腿的尾流情况。
2.1 施工干涉分析
对于施工状态下张力腿的干涉分析,不仅要考虑张力腿安装完成之后的自由站立状态,同时也要考虑张力腿安装过程中的各种可能状态。一般情况下由于结构布置的因素,TLP每个角的张力腿距离不会太远,因此,张力腿安装完成后,平台回接前一般需要进行绑扎布置。
对于布置8根张力腿的TLP平台,每个角各布置2根张力腿,按照顺时针方向对8根张力腿进行从T1到T8的编号。张力腿绑扎布置是通过钢丝绳等索具将每个角的张力腿分别与另外一个角上的张力腿连接起来,使张力腿顶部偏移一定的距离,增大同一个角上相邻张力腿之间的间隙值。张力腿绑扎布置见图3。

图3 张力腿绑扎布置示意
在张力腿施工状态下,张力腿顶部均安装有临时浮筒,临时浮筒直径8.1 m、高度9 m,用于提供张力腿施工状态下的张力,保证临时浮筒以下张力腿中不会出现压力。
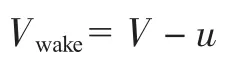
对于张力腿海上安装分析所采用的环境条件,APIRP 2T中规定见表1[12]。
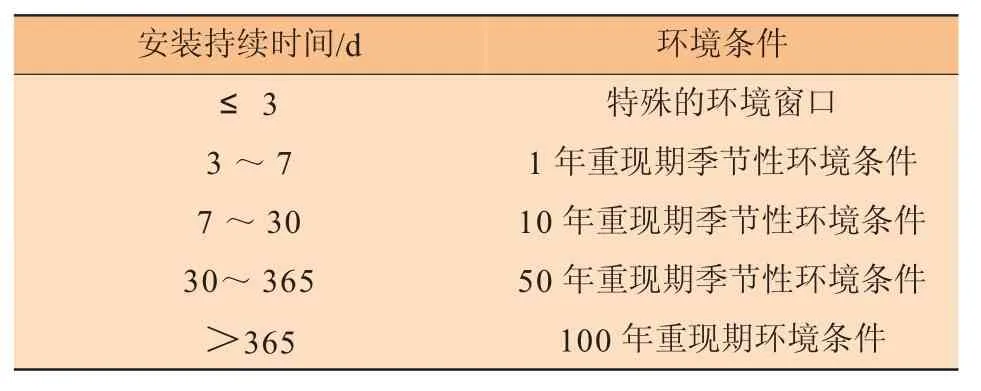
表1 TL P海上安装环境条件要求
参考以往TLP平台张力腿安装情况,对于8根张力腿的海上安装周期不会超过一个月,保守考虑,采用十年一遇的台风条件,即表层流速1.85 m/s的环境条件,进行张力腿的干涉分析。同时,结合张力腿海上安装方案,选取张力腿T8和T1、T2和T3完成绑扎布置之后处于自由站立状态作为典型工况,进行分析。FLEXCOM分析模型见图4。

图4 FL EXCOM分析模型
对于流向,在分析中需对其进行搜索,充分考虑各向来流对张力腿的影响,本文以22.5°为一个计算步长,对来流向从0°到90°进行分析。干涉分析结果见表2。
表2 施工干涉分析结果
由以上分析结果可以看到,0°来流方向时张力腿底部转角最大,为10.23°;45°来流方向时张力腿之间的净间隙值最小,为7.72 m。根据相关厂家了解,张力腿底部可允许最大转角为12°,因此目前的张力腿布置满足干涉分析要求。
2.2 在位干涉分析
在位干涉分析中张力腿顶部不考虑平台偏移影响,张力腿中张力考虑为预张力。平台偏移会带来张力腿中张力的增加,张力越大,其涡激振动效应及其相应的拖曳力系数就会降低,相应的张力腿的偏移值就会减小,相邻张力腿之间干涉风险就会降低。因此,不考虑张力腿顶部偏移,只考虑预张力的做法是一种保守做法。一旦保守的分析结果显示相邻张力腿之间发生碰撞时,则需考虑平台偏移对张力腿干涉的影响。
在位状态下需考虑的环境条件分别为一年、百年、千年一遇的台风工况。环境条件方向分别考虑平行于每个角上两根张力腿连线方向的平行来流方向(In-line方向)和垂直于每个角上两根张力腿连线方向的垂直来流方向(Transverse方向),见图5。
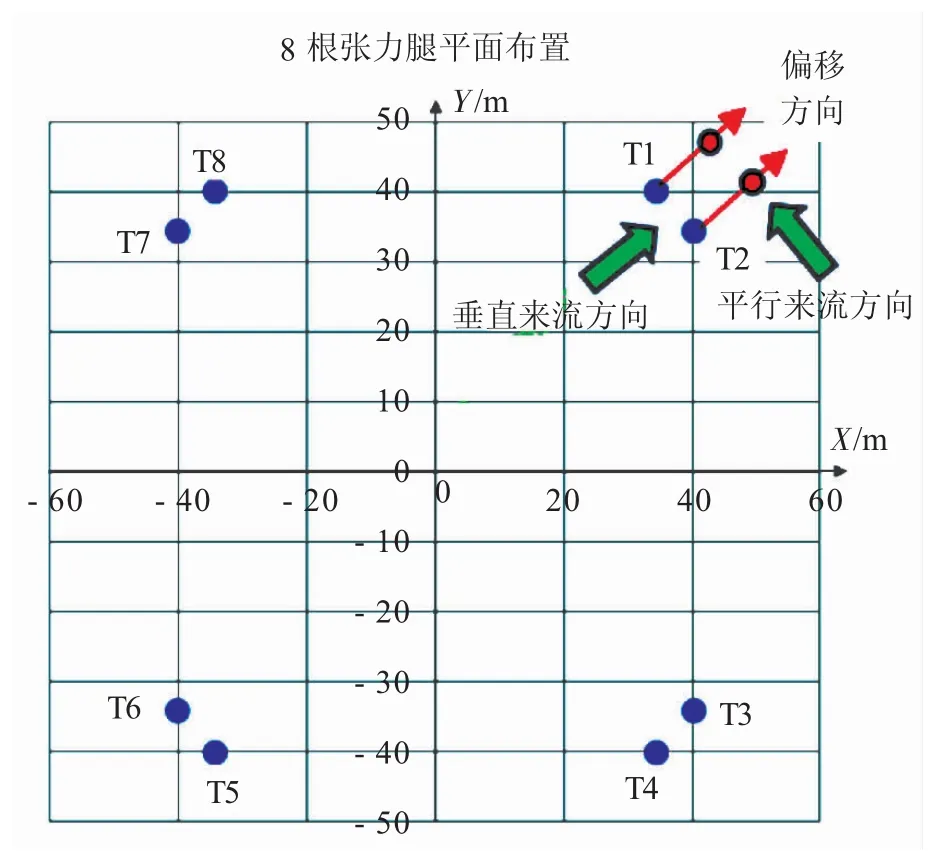
图5 在位状态下环境条件方向示意
尾流影响仅在In-line方向下考虑,在Transverse方向下没有尾流效应的影响。对于Transverse方向,沿张力腿长度方向的横流向的涡激振动幅值用于检查相邻张力腿之间的最小净间隙值。
In-line方向下的相邻张力腿干涉分析中,千年一遇台风工况的净间隙值最小,为6.54 m,具体结果见图6。
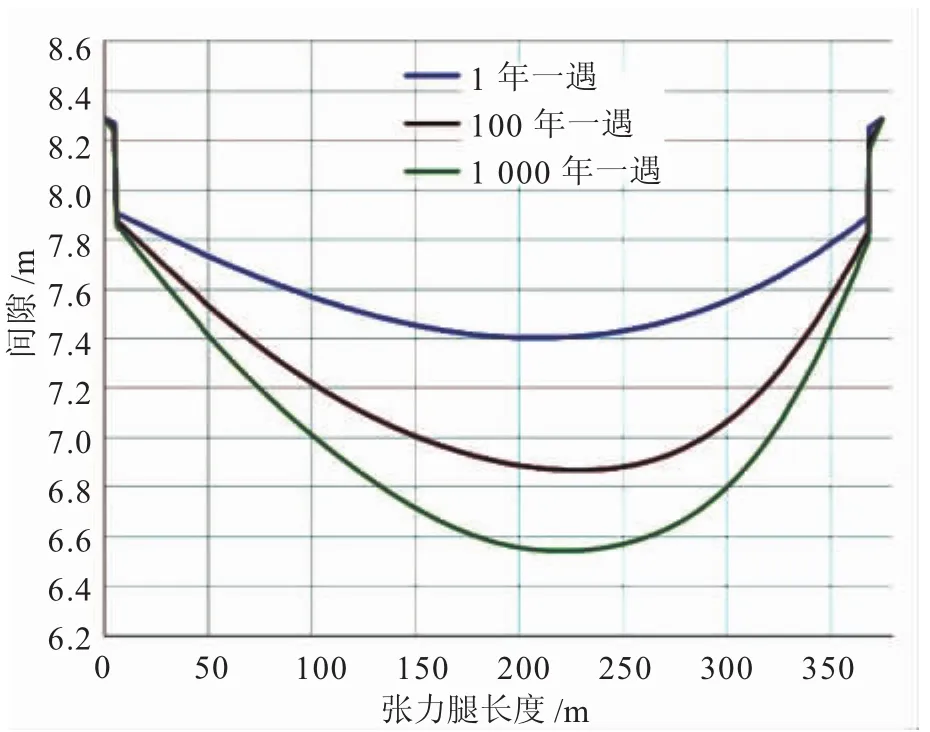
图6 In-line方向下相邻张力腿净间隙值
在Transverse方向,张力腿直立状态下,相邻张力腿之间的净间隙值为7.93 m(8.95-1.016=7.93(m)),经SHEAR7分析,一年一遇台风工况的张力腿涡激振动幅值最大,为1.08 m,因此,此种工况下相邻张力腿之间的净间隙值最小,为5.77 m(7.93-1.08×2=5.77(m))。三种工况的横流向涡激振动幅值结果见图7、表3。
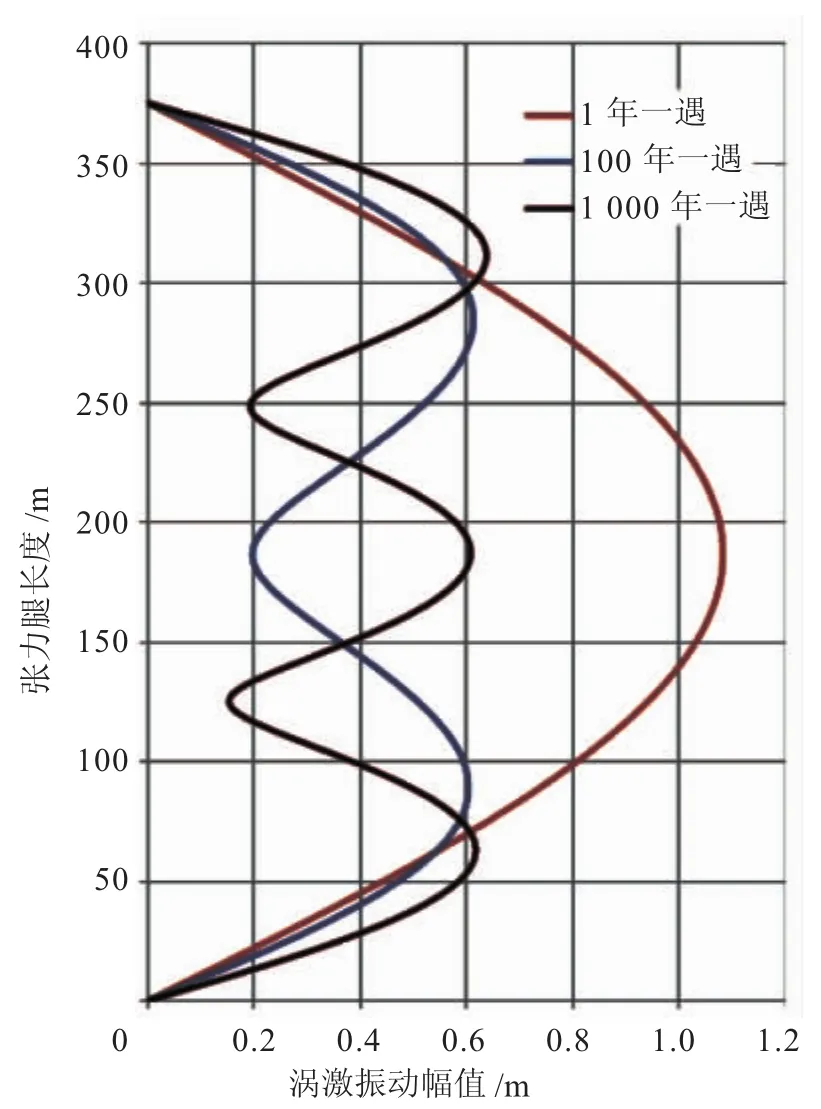
图7 三种工况横流向涡激振动幅值

表3 三种工况横流向涡激振动幅值
由以上结果可以看到,所采用的张力腿布置方案,在位状态下相邻张力腿之间不会发生干涉。
3 结束语
TLP平台所处海域一般水深较深,海流较大,且由于平台本身结构布置的限制,每个立柱下的张力腿距离也比较近。涡激振动效应引起的拖曳力系数增大引起张力腿在海流作用下的变形增大,同时尾流效应的存在降低了下游张力腿处的流速,从而导致下游张力腿变形减小,降低了相邻张力腿之间的间隙值,增大了发生干涉的风险。因此,对于TLP平台的张力腿干涉分析需仔细考虑施工和在位状态下的各种工况以及可能遭遇的各种环境条件。在设计过程中如果干涉现象发生,可通过调整临时浮筒尺寸、绑扎布置或增加扰流装置以降低VIV效应等手段来消除干涉。
[1]曾晓辉,沈晓鹏,徐本和,等.张力腿平台的水动力及结构力学问题[J].中国造船,2003,44(S):429-433.
[2]阎岩,张崎,黄一.基于张力腿平台的顶张紧式立管碰撞分析[J].上海船舶运输科学研究所学报,2012,35(1):1-6.
[3]竺艳蓉.海洋工程波浪力学[M].天津:天津大学出版社,1991.
[4]CABBAI R D,BENAROYA H.An overview of modeling and experiments of vortex-induced vibration of circular cylinders[J].Journal of Sound and Vibration,2005,282(3-5):575-616.
[5]聂武,刘玉秋.海洋工程结构动力分析[M].哈尔滨:哈尔滨工程大学出版社,2002.
[6]VANDIVER J K.Drag coefficients of long-flexible cylinders[C]//Proceedings of Offshore Technology Conference.Houston,Texas:OTC,1983:OTC 4490.
[7]黄鸿.基于顶张紧式立管干涉分析的多目标优化分析[D].大连:大连理工大学,2010:14-15.
[8]KALLEKLEVAJ,MORKKJ,SODAHLN,et al.Design guideline for riser collision[C]//Proceedings of Offshore Technology Conference.Houston,Texas:OTC,2003:OTC15383.
[9]HUSE E.Interaction in deep-sea riser array[C]//Proceedings of Offshore Technology Conference.Houston,Texas:OTC,1993:OTC 7237.
[10]SCHLICHTING H.Boundary layers[M].New York:Theory McGraw HillBook Company Inc.,1968.
[11]马驰,董艳秋,胡志敏.TLP张力腿涡激非线性响应[J].天津大学学报,2000,33(6):701-706.
[12]API RP 2T,Planning,designing,and constructing tension leg platforms[S].
Analytical research on TLP tendon clashing
YIN Hanjun,HUANG Huaizhou,LIU Zhao
China Offshore OilEngineering Company,Tianjin 300452,China
Tendon clashing analysis is to verify whether there is clashing between adjacent tendons of a TLP during pre-service phase and in-place phase,which is one of important contents for tendon design.In this paper,pre-service and in-place phase clashing analyses are performed by using FLEXCOM and SHEAR7 for the TLP with four columns and two tendons of each column,in which VIVeffect and wake effect are both considered.Especially,the typical case of tendon free standing with tendon T8 and tendon T1 tie-back and tendon T2 and tendon T3 tie-back is focused.The research results show that the tendons arrangement satisfies the requirements of construction and in-place phase clashing analysis.It is further indicated that the tendon clashing problem can be solved by adjusting temporary buoy dimension and tie-back arrangement,or adding anti-turbulence device.
tendon;clashing analysis;tie-back;vortex induced vibration (VIV);wake
10.3969/j.issn.1001-2206.2017.06.005
工信部课题“500 m水深油田生产装备TLP自主研发”。
尹汉军(1973-),男,辽宁抚顺人,高级工程师,1997年毕业于大连理工大学港口工程专业,现主要从事海洋工程结构物研究工作。Email:yinhanjun@cooec.com.cn
2017-09-11
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:38:00
能源工程(2022年2期)2022-05-23 13:51:48
装备制造技术(2020年1期)2020-12-25 05:19:44
水利规划与设计(2020年1期)2020-05-25 08:01:34
电子制作(2018年14期)2018-08-21 01:38:42
雷达学报(2017年6期)2017-03-26 07:53:06
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29 12:53:20
天津城建大学学报(2015年5期)2015-12-09 01:26:50
弹箭与制导学报(2015年1期)2015-03-11 15:32:22
舰船科学技术(2015年8期)2015-02-27 15:38:42
