
基于改进下垂控制的微电网有功与频率控制策略*
2017-12-20 09:16李燕青郭通袁燕舞
电测与仪表 2017年12期
李燕青,郭通,袁燕舞
(河北省输变电设备安全防御重点实验室,华北电力大学,河北保定071003)
0 引 言
微电网是以分布式发电技术为基础,融合储能装置、控制装置和保护装置的一体化单元,靠近用户终端负荷,能够工作在并网和自治两种模式,核心是提高供电可靠性、集约应用分布式新能源、改善电能质量[1]。微电网代表了未来一种电力能源组织结构发展趋势,对推进节能减排和实现能源可持续发展具有重要意义。微电网的控制结构可以分为三种:主从控制,对等控制和分层控制。主从控制和分层控制中各分布式单元都需要进行通信,一旦通信发生故障,微电网系统就不能正常运行,而下垂控具有无需通信便能实现负荷变化在各逆变电源之间按照电源容量分配的优点[2-3]。目前的研究大体上可分为两类,一类是利用系统小信号模型研究控制器参数选取对系统稳定性影响[4-7],一类是通过在下垂曲线方程中加入特定项来改善系统暂态响应[8-12]。
文章从改善传统下垂控制的稳态性能上出发,提出了微网在离网和联网下的两种改进控制策略,利用改进的控制策略,可以实现微网离网运行时的零频率偏差,并网运行时根据需要使电源发出指定的有功功率,仿真验证了所提策略的有效性。
1 下垂控制的基本原理
下垂控制的整体结构图如图1所示,按照功能可分为三个模块:功率控制器、电压控制器、电流控制器[11]。
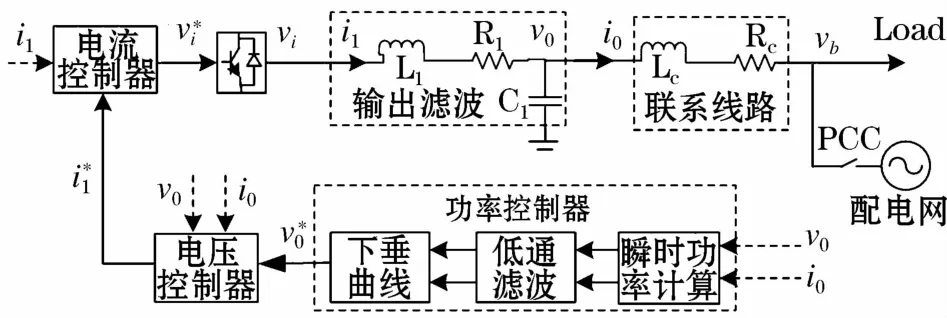
图1 下垂控制整体结构图Fig.1 Overall structure diagram of droop control
功率控制器主要实现逆变器输出功率的测量,得到的瞬时功率经过低通滤波得到变化缓慢的平均功率,平均功率经过人为制定的下垂曲线得到逆变器输出电压和频率的参考值;电压控制器根据功率控制器输出的参考电压值V0*,经过一定的控制策略(PI控制),得到电流控制器的参考电流值i1*;电流控制器的主要任务是根据从电压控制器得到的参考输入,经过一定的控制策略,给出逆变器的参考调制电压波形,逆变器按照此调制电压逆变出所需频率和幅值的PWM波形的电压,此PWM电压经过由Ll,Rl,Cl组成的低通滤波器,得到所需的正弦波电压V0,该电压再经过线路阻抗Rc,Lc向负荷供电,或者与其它下垂控制的微源接口逆变器并联,也可能经过PCC与配电网进行连接。
下面对下垂控制各模块的具体工作过程做一介绍如图2所示(以有功频率调节为例)。
假设系统初始运行于A点,有功为P0,频率为ω0。现由于某种原因系统中有功负荷增加,功率控制器检测到逆变器输出有功增大,经过下垂曲线降低参考电压的输出频率,电压控制器和电流控制器按照新给出的参考电压频率共同作用,即调节逆变器开关管的开闭状态,使逆变器输出端电压频率降低。此时,由于负荷本身的频率调节效应,负荷吸收的功率会随电压频率降低而减小,这样,逆变器在下垂曲线的控制下输出有功增加,负荷在自身调节特性约束下吸收有功减少,经过一个过渡过程,系统会到达新的稳态运行点A′,此时系统的有功功率为P1,频率为ω1。
由以上的分析过程可以看出,下垂控制对微网系统有功和频率的调节类似于传统电力系统的一次调频过程,而下垂控制也正是借鉴了传统电力系统中发电机有功频率的这一关系,将其赋予了逆变器而得出的一种控制策略。
2 下垂控制的改进
下垂控制的有功频率下垂方程为:

式中 P0i对应频率为ω0时的功率;Pi为逆变器实际发出的有功功率;mi对应有功频率下垂系数。一般情况下,在下垂控制中P0i取值为逆变器的额定功率不再改变,这就使得传统下垂控制在调节过程中丧失了很多灵活性,如果在下垂控制调节过程中同时改变P0i的值,就可以使传统下垂控制获得很多优良的稳态性质,现以离网和并网两种情形分述如下:
(1)A离网运行时
为了改善离网运行时微网系统稳态频率偏离额定值的现象,离网运行时下垂控制的有功频率特性改进如图3所示。

图3 离网时改进有功频率下垂控制Fig.3 The improved active frequency droop control strategy when off grid
图3中PIR是逆变器的额定功率,K是一个影响频率调节速度的比例因子。从图中可以看出原来固定不变的P0i现在成为一个受频率偏差Δωi的影响的变量,由于前向通道中有一个积分环节,使得微网系统进入稳态后,系统频率ωi与额定频率ω0的偏差Δωi为零。在该过程中,P0i的值不断改变,相当于在垂直方向上移动逆变器的下垂曲线,所以调节过程中仍可以保证微源按比例分担负荷。实际上,通过改变P0i来使离网系统频率恢复到额定值的过程相当于传统电力系统的二次调频过程,此改进相当于为微网系统增加了调频器,而传统下垂控制却只能进行一次调频。
(2)B联网运行时
采用下垂控制的逆变型电源联网运行时,微网系统与大电网形成一个整体,具有相同的的频率ω0,可以利用这个特点来指定逆变型电源联网运行时发出的有功功率。联网运行时下垂控制的有功频率特性改进如图4所示。
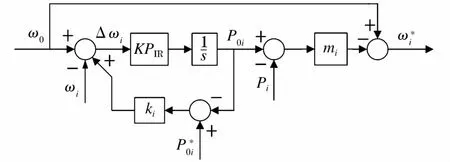
图4 联网时改进有功频率下垂特性Fig.4 The improved active frequency droop control strategy when connected to the grid
图4中PIR与K的含义和图3中一样。Ki的取值影响P0i环的调节速度。当逆变型电源采用这种改进的控制结构由离网状态转入联网状态运行时,由于大电网的影响,稳态后逆变型电源输出电压的频率必然等于电网的额定频率ω0,即频率差Δωi为零,又由于稳态后积分环节的输入必须为零,所以图4中P0i*与P0i的差值也必须为零,这样稳态时逆变器下垂曲线上的P0i等于预先设定的值P0i*,而P0i又对应于额定频率时逆变器发出的有功,所以最终联网运行的逆变电源发出的有功功率将等于预先设定的值P0i*。
对于微型燃气轮机等可调微源,可将P0i*设定为微源的额定功率,对于储能装置,由于联网运行时需要从电网吸收有功功率进行充电,可以将P0i*设定为负值,大小为储能装置的额定功率,这样当运行模式发生变化时,微源将自动以新的设定功率投入运行。
3 仿真结果
为了验证所提出的改进下垂控制的效果,在SIMULINK中进行了仿真试验,仿真所用模型如图5所示,仿真所用参数如表1所示。

表1 仿真参数表Tab.1 Simulation parameters table

图5 仿真模型结构图Fig.5 Structure diagram of simulation mode
其中DG1和DG2是两个容量可调的微源,蓄电池担当储能装置,三者均通过改进下垂控制接入微网母线中,DG3代表不可调功率元件,如光伏电池等,仿真中采用恒功率控制策略。
利用该模型分别进行离网和联网运行条件下的仿真,仿真结果如下所示:
(1)A离网运行仿真
图6为DG1和DG2在传统下垂控制下的有功和频率仿真曲线。

图6 离网时传统有功频率下垂特性仿真曲线Fig.6 Simulation curve of traditional active frequency droop characteristic
仿真中假定在0.75 s时负荷突然增加,可以看到两微源共同增加了出力来应对负荷的增加,但由于传统下垂控制中P0i的值维持不变,不具有频率恢复的机制,所以系统频率在稳态后有所下降。
图7为改进下垂控制下的DG1和DG2的有功和频率仿真曲线,可以看到尽管负荷同样在0.75 s时增加,两微源也同样增加了出力,但由于改进策略在逐渐增大P0i的值,升高了有功频率下垂曲线,所以稳态后系统频率得以恢复到额定值,同时也保证了两微源按比例分担增加的负荷,验证了所提策略的有效性。

图7 离网时改进有功频率下垂特性仿真曲线Fig.7 Simulation curves of improved active frequency droop characteristic
图8为两种情况下的DG3的有功响应曲线,可以看到,由于采用恒功率控制,在负荷增加前后,DG3的有功出力基本维持不变,符合恒功率的控制目的。

图8 DG3的有功响应曲线Fig.8 Active response curves of DG3
(2)B联网运行仿真
图9为可调电源DG1在图4所示改进控制策略下由离网转联网运行的有功和频率仿真曲线。仿真中假设在0.3 s发生并网,可以看到在并网以前DG1发出的有功功率约为35 kW,频率略低于额定频率,并网后,随着暂态过程的进行,DG1出力自动变为预先设定的自身额定功率30 kW,频率达到50 Hz,验证了图4控制策略的有效性。
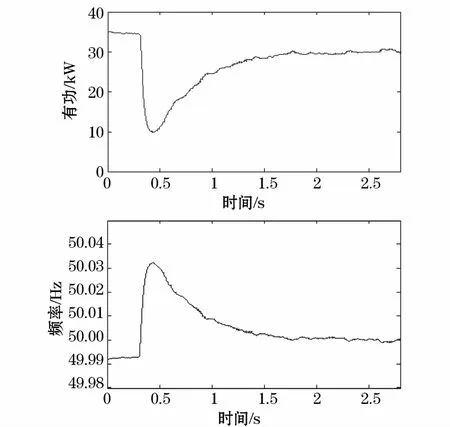
图9 联网时可调微源的有功频率仿真曲线Fig.9 Active power frequency simulation curve of adjustable micro source
图10为蓄电池组在图4所示控制策略下由离网转联网运行的有功和频率仿真曲线,仿真中假定t=0.5 s时并网,从图中可以看到在并网以前蓄电池组发出有功功率,释放电能,并网运行后,蓄电池组吸收电网发出的有功功率,进行充电,同时系统频率达到了额定频率50 Hz,达到了储能装置在微网中的控制效果。
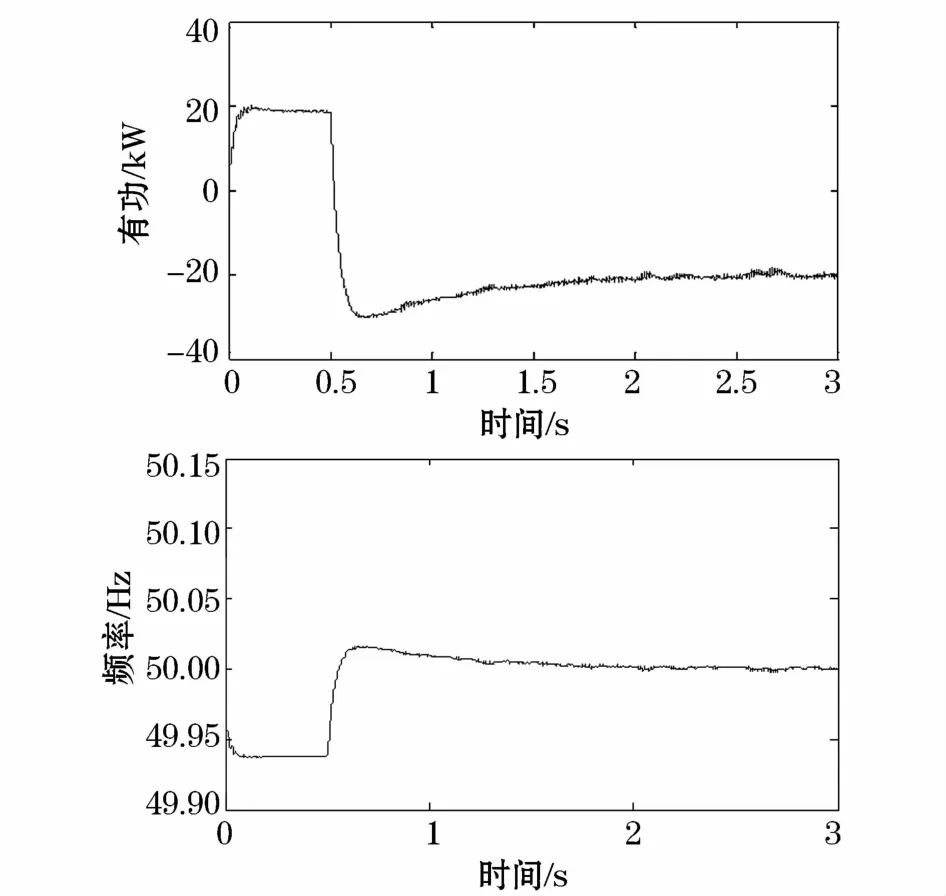
图10 联网时储能装置的有功频率仿真曲线Fig.10 Active power frequency simulation curve of energy storage device
4 结束语
首先分析了下垂控制在微网中调节系统有功功率与频率的原理,在此基础上,提出了下垂曲线在离网和联网运行下的两种改进措施,通过调整下垂曲线中与额定频率ω0对应的功率P0i的值,可以实现离网运行时的频率恢复过程,达到稳态后无频率偏差运行;联网运行时通过改进的控制措施,可调容量电源可以根据预先设定的有功功率值自动投入运行,储能装置则可以自动从发出有功功率切换为从电网中吸收有功功率,并可以保证系统稳定,最后通过仿真验证了所提出的改进策略的有效性。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
山东冶金(2019年3期)2019-07-10
通信电源技术(2018年5期)2018-08-23
消费导刊(2018年10期)2018-08-20
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
电测与仪表(2015年18期)2015-04-12
