
多变流器并联系统零序电流控制方法分析*
2017-12-20 06:00:22宁丙炎邓超然杨东海郭宝甫徐军
电测与仪表 2017年23期
宁丙炎,邓超然,杨东海,郭宝甫,徐军
(1.国家电网河南省电力公司,郑州450000;2.许继集团有限公司,河南许昌461000)
0 引 言
随着新能源技术的快速发展,光伏、风电等新能源的容量也在极快的增加。但是,这些新能源的出力具有很强的波动性,在实际应用时,往往配合储能装置来平抑波动性。三相电压型PWM变换器由于功率因数可调、效率高、体积小、能量可双向流动等优点,在储能领域得到广泛的应用[1-5]。随着储能系统容量的不断增大,对储能变流器的功率也有着更为严格的要求。然而,单个变流器功率的提高带来的成本和技术难度以几何倍数增加。因此,使用多个小功率变流器并联组成大功率变流器成为主流的解决方案[6-10]。
这种解决方案也会带来新的问题。共直流母线交流侧直接并联的三相变流器中会产生零序电流通路。如果模块之间的电路参数或者控制效果不同,在并联模块之间就会产生较大的零序环流,从而使得并网点输出电流发生畸变,增加变流器损耗,降低系统运行效率,严重时可能导致系统离网。
抑制环流最根本的方法是阻断环流的通路,包括各变流器使用独立的直流电源、交流侧采用多绕组变压器的方式实现电气隔离。这些方式可以完全消除环流,但是会增大变流器的体积,提高变流器的成本。文献[4]提出了一种基于无差拍控制的零序环流抑制方法,这种方法可以有效滤除零序环流,效果较好。文献[5]提出了利用零序PI控制器对空间矢量脉宽调制(space vector pulse width modulation,SVPWM)中零矢量的分配进行调节,这种方法易于实现,可扩展性强。
但是上述文献在进行仿真时,其实验条件多为两路变流器并联系统,对于三个及三个以上的变流器并联系统并没有较多的研究。本文将实验条件变为三个变流器并联,从控制效果以及实现该方法的难易情况对上述几种方法进行分析。综合比较得到一种实用性较高的三个及三个以上变流器并联系统的零序环流控制方法。
1 三相PWM变换器并联系统平均值模型
本文中并联系统为共直流母线交流侧直接并联的结构,如图1所示。

图1 并联三相变流器的拓扑结构Fig.1 Topology of parallel three-phase converter
选取直流负极作为参考点,则并联三相变流器在三相静止坐标系下的平均模型可以表示为:


对于单个变流器而言,不存在环流通路,零序环流为0。对于两个变流器组成的并联系统而言,由于通路较为简单,如果存在环流,必然是从一个变流器流入另一个变流器,变流器的零序环流之和为0。对于三个及三个以上变流器而言,零序环流的通路较多,但仍满足所有变流器零序环流之和为0的结论。即:

式中ixz表示第x个模块的零序电流。
由于三相变流器在三相静止坐标系下的控制策略较为复杂,在实际应用中,往往采用坐标变换,将三相静止坐标系变为两相旋转坐标系,即对在三相静止坐标系下得到的方程采用abc/dq变换。但是,abc/dq变换是在不考虑零轴分量时的一种简化变换,对于本文而言,需要将控制量的零轴分量纳入控制变量之中。因此,本文采用的变化为补充了零轴分量变换的形式,即abc/dq0变换。该变换的坐标变换矩阵为:

利用矩阵T就可以将三相静止坐标系下的交流量变换为两相同步旋转坐标系下的直流量。从式(1)~式(3)及式(5)中,可以看出,如果对式(1)~式(3)进行变换,为了简化分析,需要对占空比进行一些处理。本文仿照零序电流的概念,定义零序占空比,零序占空比定义如式(6)所示。

对式(1)~式(3)进行 abc/dq0变换,有:


从平均值模型中可以看出,零序环流的与并联系统中变流器的零矢量的分配情况以及并联变流器硬件电路(主要是滤波电路)的参数差异有关。而硬件电路的差异是难以避兔的,因此,控制变流器的零矢量分配就是控制零序环流最有效的解决方法。
2 零序环流控制方法:
2.1 零序环流的PI控制方法
PI控制方法具有适用范围广,调节参数较为方便等特点,在工程控制领域得到广泛应用。
单独考虑零轴电流的情况,将式(7)~式(9)进行简化,可以得到:

可以看出,零序电流与零序占空比之间实际上是一个一阶系统,可以用PI调节进行控制。从式(7)~式(9)来看,二者之间的关系仅仅与变流器本身的电路参数有关,组成并联系统的其他变流器的参数没有直接关系,控制方法较为独立。因此,该方法可以较好的适用于无互联线系统。
2.2 无差拍控制
考虑到三个变流器组成的并联系统中,三个变流器的零序电流之和为0。uz为并联系统输出电压经过坐标变换得到的变量,应尽可能避兔该变量的影响。因此,式(10)~式(12)可化为:

从式(13)难以进一步化简。为了解决这一问题,本文将三个变流器并联系统人为划分成两个变流器并联组成的模块,让剩下的一个变流器与虚拟形成的模块进行并联。这样处理可将三个变流器组成的并联系统简化成两个变流器并联系统并联而成并联系统。此时,由式(10)~式(11)可化简得到式:

将微分形式转化为离散形式,可以得到:

从零序电流控制的角度来看,应使得iz2(k+1)为0。可以得到零序占空比和现在时刻的零序电流之间较为明确的数学关系。即可以在零序电流控制上采用无差拍方法。但是,该方法必须得到两个并联变流器的占空比和电路的实际电感,对电路参数以及并联变流器之间的信息交互有一定的要求,不适用于无互联线系统。
3 仿真分析
为了验证上述分析的正确性,本文在SIMULINK中搭建了三路并联的仿真模型。首先分析在滤波电感均为2mH且输出功率均为20 kW时,三个变流器组成的并联系统的零序电流分布情况。仿真得到的结果如图2至图5所示,图2和图4每格代表50 A,图3和图5每格代表5 A。

图2 电感为2 mH,输出功率为20 kW,且采用PI方式控制零序电流时,三路变流器的A相输出电流波形Fig.2 Output currentwaveform of phase A with PI control when inductance is 2 mH and output power is 20 kW

图3 电感为2 mH,输出功率为20 kW,且采用PI方式控制零序电流时,三路变流器的零序电流波形Fig.3 Zero-sequence currentwaveform with PI control when inductance is 2 mH and output power is 20 kW

图4 电感为2 mH,输出功率为20 kW,且采用无差拍方式控制零序电流时,三路变流器的A相输出电流波形Fig.4 Output currentwaveform of phase A with deadbeat controlmode when inductance is 2 mH and output power is 20 kW

图5 电感为2 mH,输出功率分别为20 kW,且采用无差拍方式控制零序电流时,三路变流器的零序电流波形Fig.5 Zero-sequence currentwaveform with deadbeat control when inductance is 2 mH and output power is 20 kW
从仿真结果中可以看出,采用PI控制以及采用无差拍方法控制均可以对三路并联系统的零序环流起到较好的控制效果。采用无差拍控制对零序环流的抑制能力更好,但采用无差拍控制时,零序电流会出现较大的毛刺现象。
在实际应用时,会遇到三路变流器输出功率不相同的情况,本文也就此情况进行了仿真分析,将三路变流器的输出功率分别设置为20 kW、17.5 kW和15 kW。仿真得到的三路变流器的输出电流以及各各自的零序电流大小如图6至图9所示。从仿真结果中可以看出,三个变流器的零序电流较小,三个变流器各自的输出电流波形较好。采用无差拍控制方法时,存在明显毛刺现象,应该是此时两路变流器的驱动信号之间存在较大差异,无差拍方法可以迅速平衡该差异,保证零序电流在较小的范围内。

图6 电感为2 mH,输出功率分别为20 kW、17.5 kW、15 kW,且采用PI方式控制零序电流时,三路变流器的A相输出电流波形Fig.6 Output currentwaveform of phase A with PI controlwhen inductance is 2 mH and output power is 20 kW,17.5 kW,15 kW

图7 电感为2 mH,输出功率分别为20 kW、17.5 kW、15 kW,且采用PI方式控制零序电流时,三路变流器的零序电流波形Fig.7 Zero-sequence currentwaveform with PI control when inductance is 2 mH and output power is 20 kW,17.5 kW,15 kW

图8 电感为2 mH,输出功率分别为20 kW、17.5 kW、15 kW,且采用无差拍方式控制零序电流时,三路变流器的A相输出电流波形Fig.8 Output currentwaveform of phase A with deadbeat controlwhen inductance is 2 mH and output power is 20 kW,17.5 kW,15 kW

图9 电感分别为2 mH,输出功率分别为20 kW、17.5 kW、15 kW,且采用无差拍方式控制零序电流时,三路变流器的零序电流波形Fig.9 Zero-sequence currentwaveform with deadbeat control when inductance is 2 mH and output power is 20 kW,17.5 kW,15 kW
最后,考虑在装置的实际生产过程中产生的参数误差,以及如果选用不同批次、不同厂家的生产的变流器组成并联系统,本文更改了各个变流器的滤波电感参数,将变流器的滤波电感参数分别设置为1.5 mH、2 mH和2.5 mH。各个模块的输出功率分别为20 kW、17.5 kW和15 kW。仿真得到的结果如图10~图13所示。
从图10中~图13可以得到,两种方法均可以实现对零序电流较好的控制作用。输出电流均没有出现明显畸变。但是,采用无差拍控制出现了零序电流峰峰值较大的情况,这一点与滤波电感相同、输出功率不同时的情况一致。因此,本文认为无差拍控制在对滤波电感不同时的并联系统零序电流控制存在一定的不足,但是仍有一定的控制作用。
结合上述三组实验,得出以下结论:采用PI控制和无差拍控制均可以实现并联系统的零序电流控制,但是控制效果略有不同,其中PI控制方式较为稳定,其控制结果与并联系统中变流器的滤波电感大小以及变流器输出功率关系不是很大,具有一定的独立性。而采用无差拍控制方式的控制效果与变流器输出功率有一定关系。此外,在仿真中,发现零序电流存在一定的突变现象,本文认为这是由于变流器之间存在微弱的相位差,在采用空间矢量变换时,各个模块在切换所在空间区域时,存在一定的时间差,导致模块间的开关状态出现较大不一致导致的。

图10 电感分别为1.5 mH、2 mH、2.5 mH,输出功率分别为20 kW、17.5 kW、15 kW,且采用PI方式控制零序电流时,三路变流器的A相输出电流波形Fig.10 Output currentwaveform of phase A with PI controlwhen inductance is 1.5 mH,2 mH,2.5 mH and output power is 20 kW,17.5 kW and 15 kW

图11 电感分别为1.5 mH、2 mH、2.5 mH,输出功率分别为20 kW、17.5 kW、15 kW,且采用PI方式控制零序电流时,三路变流器的零序电流波形Fig.11 Zero-sequence currentwaveform with PI controlwhen inductance is 1.5 mH,2 mH,2.5 mH and output power is 20 kW,17.5 kW,15 kW

图12 电感分别为1.5mH、2mH、2.5mH,输出功率分别为20kW、17.5kW、15kW,且采用无差拍方式控制零序电流时,三路变流器的A相输出电流波形Fig.12 Output currentwaveform of phase A with deadbeat controlwhen inductance is 1.5mH,2mH,2.5mH and output power is 20kW,17.5kW and 15kW
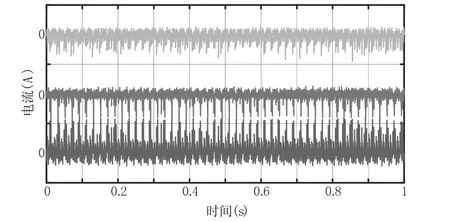
图13 电感分别为1.5 mH、2 mH、2.5 mH,输出功率分别为20 kW、17.5 kW、15 kW,且采用无差拍方式控制零序电流时,三路变流器的零序电流波形Fig.13 Zero-sequence currentwaveform with deadbeat control when inductance is 1.5 mH,2 mH,2.5 mH and output power is 20 kW,17.5 kW,15 kW
4 结束语
本文分析了三路变流器并联系统零序电流产生的原因,并给出了变流器并联系统中零序环路的PI抑制方法和无差拍抑制方法。利用SIMULINK建立了变流器并联系统的仿真模型,验证了上述两种方法的可行性。仿真结果表明,PI抑制方法和无差拍抑制方法均可以有效的抑制并联系统的零序环流,但PI抑制方法在三个或者多个变流器组成的并联系统上,对零序电流的控制效果更加稳定,与变流器的输出功率以及各个模块的滤波电感关系并不大,在工程实践中有更大的应用范围。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27 06:29:22
电机与控制应用(2022年4期)2022-06-27 06:29:18
设备管理与维修(2016年7期)2016-04-23 06:51:36
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
通信电源技术(2016年5期)2016-03-22 01:10:13
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2015年21期)2015-04-09 11:51:56
电测与仪表(2014年12期)2014-04-04 12:10:18
电测与仪表(2014年19期)2014-04-04 12:06:22
