循环流化床锅炉主汽温自抗扰控制系统
2017-12-19 02:54:07王万召
动力工程学报 2017年12期
王万召, 谭 文
(1.河南城建学院 能源与建筑环境工程学院,河南平顶山 467036;2.华北电力大学 控制与计算机学院,北京 102206)
循环流化床锅炉主汽温自抗扰控制系统
王万召1, 谭 文2
(1.河南城建学院 能源与建筑环境工程学院,河南平顶山 467036;2.华北电力大学 控制与计算机学院,北京 102206)
针对循环流化床锅炉主汽温具有大惯性、非线性和动态特性随工况变化而难以精确建模的特点,基于自抗扰控制理论,提出了一种循环流化床锅炉主汽温自抗扰控制方案.通过设计扩张状态观测器对循环流化床锅炉主汽温对象的动态不确定性和外扰进行实时估计,利用该估计量对状态误差反馈控制器的输出量进行补偿,实现循环流化床锅炉主汽温的精确控制.结果表明:该控制方案能很好地解决循环流化床锅炉主汽温对象动态特性随锅炉负荷变化的难题,可以有效克服主汽温对象的大惯性和非线性;相比于常规的比例积分微分(PID)控制方案,所提控制方案显著改善了主汽温对象的调节品质.
自抗扰控制; 循环流化床锅炉; 主汽温; 扩张状态观测器; 非线性状态误差反馈
循环流化床锅炉(CFBB)具有燃烧效率高、污染少和适应性广等优点,在国内外得到了广泛研究和应用[1]. 目前,国内的CFBB在自动控制技术方面还存在许多亟需解决的问题.CFBB主汽温具有非线性、大惯性、参数时变和大滞后等特点,这使得常规的串级比例积分微分(PID)控制方案难以取得理想的控制效果[2-5]. 当负荷工况大幅变化时,CFBB主汽温对象的特性变化很大,常规的控制方案不能快速适应被控对象动态特性的剧烈变化,难以实现CFBB主汽温的全程控制.鉴于此,笔者基于自抗扰控制(ADRC)的基本思想,提出了一种CFBB主汽温自抗扰控制方案.
ADRC是由中国科学院系统科学研究所研究员韩京清于20世纪80年代末期首次提出来的,其最突出的特征是把作用于被控对象的所有不确定作用都归结为“未知扰动”,通过设计一个扩张状态观测器(ESO),利用对象的输入输出数据对“未知扰动”进行估计并补偿,从而实现对不确定性对象的控制[6]. 然而,经典的ADRC技术通常适用于三阶以下的低阶对象,对于高阶对象会强行将其降为三阶以下对象后才进行处理,这样必然会损害控制效果,不能充分发挥ADRC的优点[7-8]. 笔者通过引入高阶惯性环节安排过渡过程,利用参数动态确定法整定ESO等措施,使ADRC成功应用于高阶非线性时变对象的控制.最后,通过仿真实验验证了所提方案的可行性和有效性.
1 CFBB主汽温对象动态特性
某国产CFBB采用表面式减温器调节主汽温,减温器将整个过热器分成导前区和惰性区[9].导前区和惰性区的动态特性分别用传递函数G2(s)和G1(s)表示,具体形式如下:

(1)
(2)
式中:K2、T2、K1和T1为主汽温对象建模时获得的特性参数.
当CFBB负荷在100%~25%之间变化时,导前区和惰性区传递函数中参数的变化范围如下:K1为0.5~0.8,T1为80~100 s,K2为1~2,T2为35~50 s.
2 CFBB主汽温ADRC控制方案
由于采用喷水减温控制的CFBB主汽温对象惯性很大,而且其动态特性随机组负荷波动的变化很大,使得针对某特定负荷工况整定的串级PID调节参数很难在负荷变化时取得满意的控制效果.因此,提出采用ADRC控制方案来解决主汽温对象动态特性随负荷工况大幅变化的问题.同时,为充分利用串级控制的优点,整体系统框架依然采用串级结构,主调节器采用自抗扰控制器,副调节器使用比例调节器.由此可得CFBB主汽温ADRC的方框图,如图(1)所示.在图1中,M为高阶惯性环节,用于安排过渡过程;NLSEF为非线性状态误差反馈控制器.
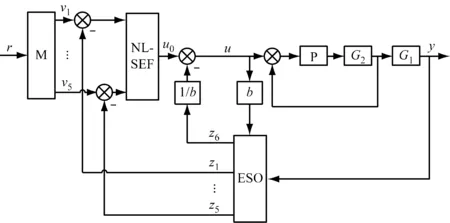
图1 CFBB主汽温ADRC结构图
2.1 CFBB主汽温过渡过程安排
在经典的ADRC文献中,通常采用基于最优控制理论的跟踪微分器,根据设定值r来安排过渡过程.然而,对于CFBB主汽温这类高阶对象,应用最优控制理论设计跟踪微分器是非常困难的,这限制了ADRC在高阶系统控制中的应用.考虑到实际工程应用,根据设定值r安排过渡过程的主要目的是柔化r的变化,并不需要追逐最优效果.因此,可参考非线性逆控制系统中预期动力学方程的选取,采用一个如式(3)所示的高阶惯性环节作为柔性环节安排主汽温对象的过渡过程[10].
(3)
式中:M(s)为柔性环节的传递函数;T为动态特性参数;V(s)、R(s)分别为柔性环节的输出v(t)和给定输入r(t)的拉氏变换;n为被控对象的阶数;ξ为阻尼比;ω为角频率.
该柔性环节的时域表达式为:
v(n)+k1v(n-1)+k2v(n-2)+…+
kn-1v(1)+knv=kr(t)
(4)
其中,
(5)
由此,该柔性环节安排的过渡过程输出及其各阶导数输出为:
(6)
这样就在满足实际工程需要的前提下,方便地解决了过渡过程安排问题.
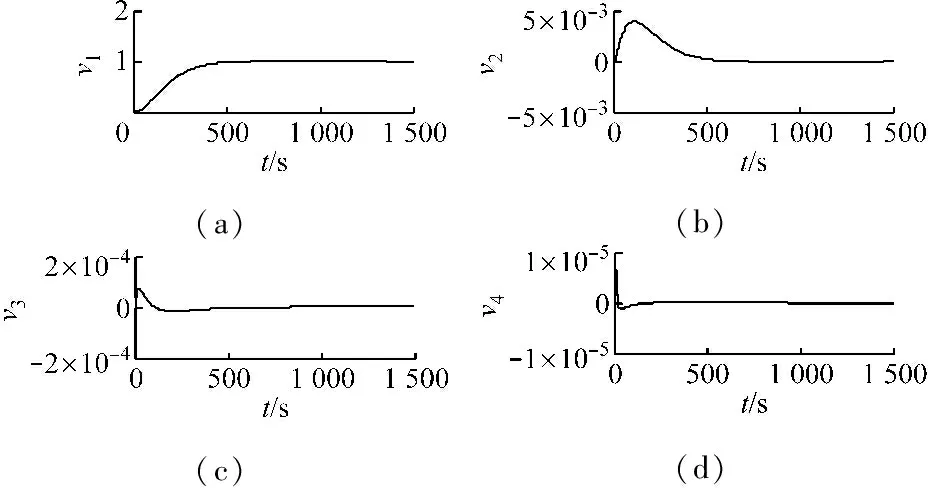
由式(3)可知,影响柔性环节M输出的主要参数为T、ξ和ω.参数T影响过渡过程的快慢,ξ影响阶跃响应过渡曲线的形状,ω则直接决定阶跃响应过程的快慢,从而决定了M的跟踪性能和柔化效果.根据CFBB主汽温对象的动态特性和控制目标要求,取M的阶数为主汽温对象惰性区传递函数的阶数,即n=5,其他参数取值如下:T=9,ξ=0.9,ω=0.01,从而可得到M安排的过渡过程,如图2所示.
(a)(b)(c)(d)
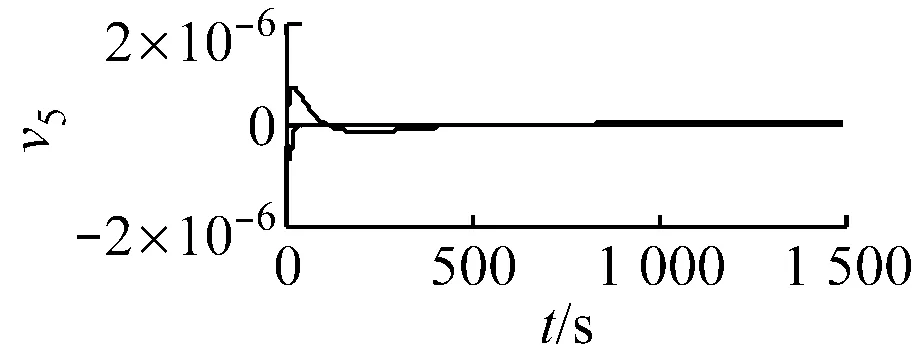
(e)
2.2 CFBB主汽温对象ESO设计
假设CFBB主汽温对象采用非线性微分方程可表示为:
x(n)=f(x,…,x(n-1),t)+w(t)+bu(t)
(7)
式中:f(x,…,x(n-1),t)为由CFBB主汽温对象的状态变量构成的非线性时变函数,其精确模型未知;w(t)为主汽温对象所受的外扰,其动态特性未知;u(t)为主汽温对象的输入变量;b为输入变量的系数;x,…,x(n-1)为主汽温对象的状态变量,令
x1=x,x2=x′,…,xn=x(n-1)
(8)
可得主汽温对象的状态空间方程为:
(9)
由此可构建状态观测器:
(10)
式中:ln为非线性ESO中的系数;g(·)为非线性函数.
用a(t)表示主汽温对象的未建模动态特性和未知扰动,即
a(t)=f(x1,…,xn,t)+w(t)
(11)
根据状态观测器理论可知,只要选择合适的非线性函数g(z),就可以使状态观测器的各状态变量分别跟踪系统的相应状态变量和外扰a(t)[11].利用非线性ESO对未建模动态特性和a(t)进行估计,就能够在控制过程中对其进行补偿,从而提高控制系统的调节品质和鲁棒性.
为方便整定非线性ESO中的系数l1,l2,…,ln+1,取
(12)
将式(10)转化[12]为
(13)
系数m1,m2,…,mn+1可构成矩阵A:
(14)
设式(13)所示状态观测器的期望极点为p1,p2,…,pn+1,则参数m1,m2,…,mn+1应满足:
(15)
式中:I为单位矩阵.
因此,只要指定状态观测器的期望极点,将式(15)左右两边分别展开为s的多项式,再令相应项的系数分别相等,就可以确定系数m1,m2,…,mn+1的值,从而实现非线性扩张状态观测器.
针对CFBB主汽温对象,采用6阶ESO分别估计对象的5个状态x1~x5以及未知动态特性和外扰a(t).假设ESO的期望极点为6重极点-5,可得到整定参数:m1=30,m2=375,m3=2 500,m4=9 375,m5=18 750,m6=15 625.为检验非线性扩张状态观测器的性能,针对100%负荷时的主汽温对象,施加单位阶跃输入,可得到非线性扩张状态观测器的6个状态z1~z6,对象的5个状态x1~x5以及未知动态特性和外扰a(t),如图3所示.可见,ESO可以对CFBB主汽温对象的状态以及未知动态特性和外扰实现良好的观测和跟踪.

(a)(b)(c)(d)(e)(f)
图3 扩张状态观测器跟踪状态曲线
Fig.3 Tracking curves of the extended state observer
2.3 CFBB主汽温状态误差反馈控制
对采用非线性微分方程式(7)描述的CFBB主汽温对象采用补偿律:

(16)
式中:u0为非线性状态误差反馈控制器输出.
由于ESO已把不确定对象和未知外扰a(t)估计为zn+1,因此可以将式(9)变换为:
(17)
其输出为:
y=x1
(18)
因此,可以采用状态误差反馈方式设计控制器,得到的非线性状态误差反馈控制律为:
(19)
式中:vi-zi为柔化环节安排的过渡过程及其各阶导数与ESO观测所得的对象状态变量的差值;h(x)为非线性函数;qi为相应的系数,通过恰当地选择qi的值,可以使控制器具有良好的动态性能和鲁棒性.
3 仿真实验及分析
为检验ADRC系统跟踪主汽温指令信号的性能,在主汽温指令信号输入端加入单位阶跃信号,考察系统跟踪给定值的快速性、准确性和鲁棒性.
3.1 100%负荷工况下的仿真
为充分利用串级控制的优点,CFBB主汽温调节系统依然采用串级结构.由于主调节器采用自抗扰控制器,而当前对于状态误差反馈控制器的参数整定还没有比较有效的确定方法,因此结合仿真实验,给出了非线性状态误差反馈控制器的系数:q1=450,q2=27 000,q3=1.65×106,q4=2.35×107,q5=2.35×108;副调节器P采用纯比例调节器[9],比例系数kp2=8.为进行比较,对CFBB主汽温控制系统同时进行传统比例积分微分-比例(PID-P)串级控制仿真实验,调节器参数取文献[9]中推荐值,即副调节器P的比例系数kp2=8;主调节器PID参数值kp1=3.4,ki1=0.008 4,kd1=227.仿真结果如图4所示.由图4可以看出,传统的PID-P控制的超调大,振荡大;而本文所提ADRC-P控制方案可以在主汽温指令信号阶跃变化时实现快速、精确的跟踪,超调很小,控制品质良好.
3.2 其他负荷工况下的仿真
为检验自抗扰控制器对被控对象动态特性变化的适应性,保持ADRC控制器参数和PID控制器参数不变,分别对ADRC-P控制方案和PID-P控制方案在60%和25%负荷工况下进行给定值单位阶跃实验,结果如图5和图6所示. 对比图4~图6可以看出,当对象动态特性发生大幅改变时,ADRC-P控制方案能利用非线性扩张观测器估计对象特性的变化,并能进行补偿,故而控制品质几乎没有衰减;而常规PID-P控制方案的控制品质却急剧变差,难以满足控制要求.

图4 100%负荷下主汽温的仿真曲线

图5 60%负荷下主汽温的仿真曲线
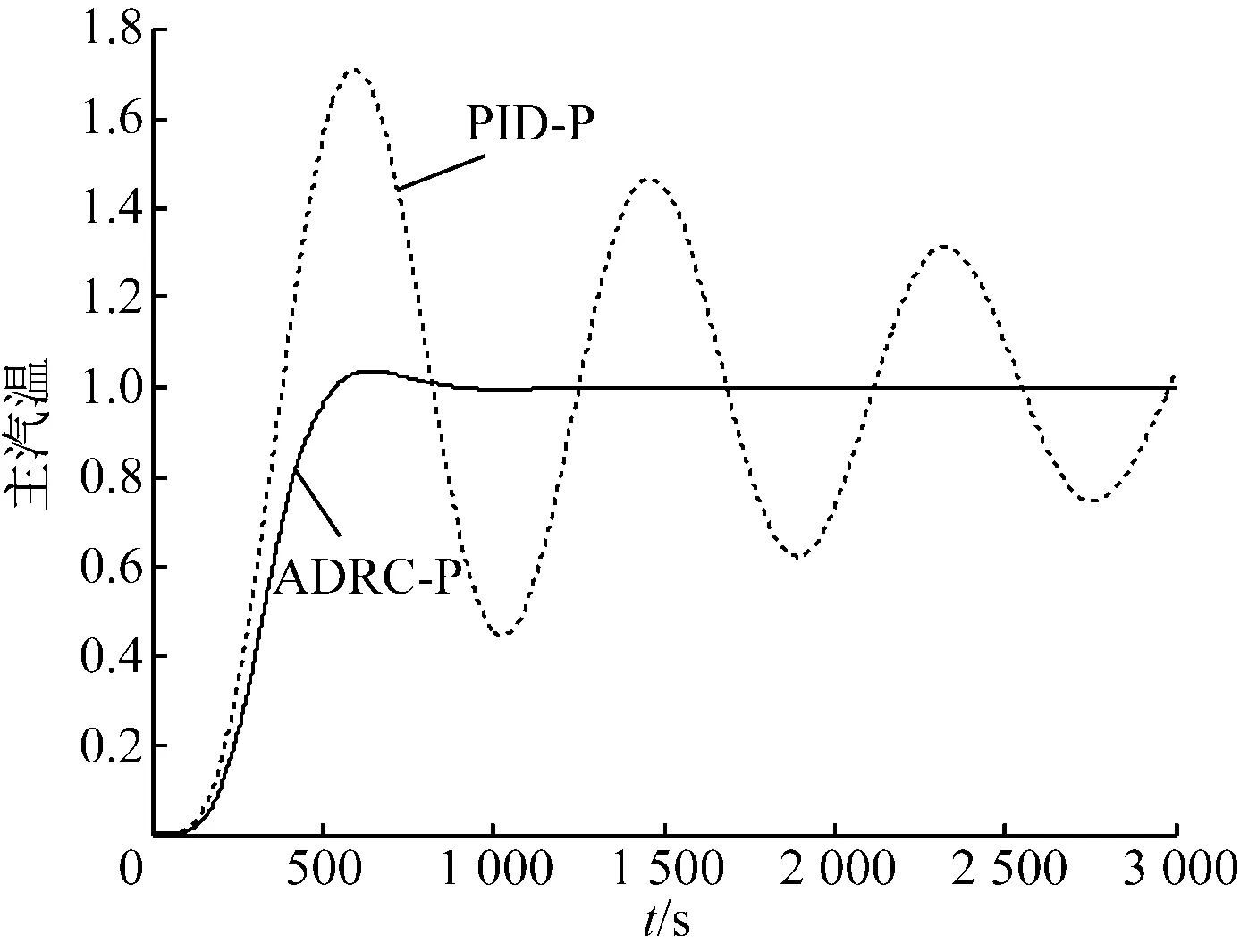
图6 25%负荷下主汽温的仿真曲线
4 结 论
基于ADRC的基本思想,提出了一种CFBB主汽温ADRC控制方案.该控制方案不需要了解CFBB主汽温对象的精确模型,通过设计扩张状态观测器实现对被控对象未知不确定和外扰的估计.通过高阶惯性环节安排过渡过程,利用非线性状态误差反馈技术实现了主汽温对象的精确控制.仿真结果表明,所提CFBB主汽温ADRC控制方案能够在被控对象动态特性发生大幅变化时实现对给定值的良好跟踪,控制品质优良,具有很强的鲁棒性.所提ADRC算法只用到了对象的名义模型信息,不需要被控对象的精确模型,具有很好的工程应用价值,为动态特性时变、外扰未知、难于精确建模的非线性对象控制提供了一种解决方案.
[1] 岑可法, 倪明江, 骆仲泱, 等. 循环流化床锅炉理论设计与运行[M]. 北京: 中国电力出版社, 1998.
[2] 杨景祺, 赵伟杰, 郭荣, 等. 循环流化床锅炉控制系统的分析与设计[J].动力工程, 2005, 25(4): 517-522.
YANG Jingqi, ZHAO Weijie, GUO Rong, et al. Analysis and design of control systems of circulating fluidized bed boilers[J].ChineseJournalofPowerEngineering, 2005, 25(4): 517-522.
[3] 骆仲泱, 何宏舟, 王勤辉, 等. 循环流化床锅炉技术的现状及发展前景[J].动力工程, 2004, 24(6): 761-767.
LUO Zhongyang, HE Hongzhou, WANG Qinhui, et al. Status quo-technology of circulating fluidized bed boiler and its prospects of development[J].PowerEngineering, 2004, 24(6): 761-767.
[4] 刘吉臻, 岳俊红, 刘向杰, 等. 循环流化床锅炉主汽温的模糊预测函数控制[J].动力工程, 2007, 27(4): 537-540, 644.
LIU Jizhen, YUE Junhong, LIU Xiangjie, et al. Fuzzy predictive functional control of fresh steam temperature of circulating fluidized bed boilers[J].JournalofPowerEngineering, 2007, 27(4): 537-540, 644.
[5] 王朋, 刘林, 陈哲, 等. 基于改进DE算法的PID参数整定及其应用[J].动力工程学报, 2015, 35(3): 191-196.
WANG Peng, LIU Lin, CHEN Zhe, et al. PID parameter tuning based on improved DE algorithm and the application[J].JournalofChineseSocietyofPowerEngineering, 2015, 35(3): 191-196.
[6] 韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2009.
[7] 黄焕袍, 武利强, 韩京清, 等. 火电单元机组协调系统的自抗扰控制方案研究[J].中国电机工程学报, 2004, 24(10): 168-173.
HUANG Huanpao, WU Liqiang, HAN Jingqing, et al. A study of active disturbance rejection control on unit coordinated control system in thermal power plant[J].ProceedingsoftheCSEE, 2004, 24(10): 168-173.
[8] 陈红, 曾健, 王广军. 蒸汽发生器水位的自抗扰控制[J].中国电机工程学报, 2010, 30(32): 103-107.
CHEN Hong, ZENG Jian, WANG Guangjun. Steam generator water level control based on active disturbances rejection control[J].ProceedingsoftheCSEE, 2010, 30(32): 103-107.
[9] 牛培峰. 循环流化床锅炉汽温自适应解耦控制系统[J].自动化学报, 1999, 25(1): 127-132.
NIU Peifeng. Steam temperature adaptive decoupling control system for CFBB[J].ActaAutomaticaSinica, 1999, 25(1): 127-132.
[10] 李东海, 姜学智, 徐忠净, 等. 一类不可逆系统的非线性控制及预期动力学方程的选取[J].控制与决策, 1998, 13(6): 686-689.
LI Donghai, JIANG Xuezhi, XU Zhongjing, et al. Nonlinear control of a class of non-inverse system and choice of desired dynamical equations[J].ControlandDecision, 1998, 13(6): 686-689.
[11] 韩京清. 一类不确定对象的扩张状态观测器[J].控制与决策, 1995, 10(1): 85-88.
HAN Jingqing. The "extended state observer" of a class of uncertain systems[J].ControlandDecision, 1995, 10(1): 85-88.
[12] 康忠健, 陈学允. 非线性扩张状态观测器的一种设计方法[J].电机与控制学报, 2001, 5(3): 199-203.
KANG Zhongjian, CHEN Xueyun. A design method of nonlinear extension state observer[J].ElectricMachinesandControl, 2001, 5(3): 199-203.
AnActiveDisturbanceRejectionControlSystemforMainSteamTemperatureofaCFBBoiler
WANGWanzhao1,TANWen2
(1. School of Energy and Building Environmental Engineering, Henan University of Urban Construction, Pingdingshan 467036, Henan Province, China; 2. School of Control and Computer Engineering, North China Electric Power University, Beijing 102206, China)
An active disturbance rejection control scheme was proposed for the main steam temperature of a circulating fluidized bed boiler based on active disturbance control theory, considering following features of the steam temperature, such as large inertia, nonlinearity and so on, which is hard to be accurately modeled due to the variation of its dynamic characteristics with working conditions. An extended state observer was designed to estimate the dynamic state uncertainty and external disturbance of the main steam temperature in real time, so as to realize an accurate control on the main steam temperature by compensating the output of the state error feedback controller with the estimator. Results show that the control scheme can solve the problem existing in the main steam temperature that its dynamic characteristics varies with boiler load, and can effectively overcome the deficiency of large inertia and nonlinearity. Compared with conventional PID control scheme, the proposed scheme significantly improves the control quality on the main steam temperature of circulating fluidized bed boilers.
active disturbance rejection control (ADRC); circulating fluidized bed boiler; main steam temperature; extended state observer; non-linear state error feedback
2016-12-13
2017-01-31
国家自然科学基金资助项目(61174096)
王万召(1972-),男,河南平顶山人,副教授,博士,研究方向为智能控制和热工自动控制.电话(Tel.):13781865935;
E-mail:ewangwanzhao@163.com.
1674-7607(2017)12-0977-06
TK323
A
510.80
猜你喜欢
石油石化绿色低碳(2019年6期)2019-01-14 01:16:16
商品与质量(2018年46期)2018-12-08 06:50:28
东北电力技术(2017年4期)2017-05-17 09:36:44
电力与能源(2017年6期)2017-05-14 06:19:45
山东工业技术(2016年15期)2016-12-01 05:30:46
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
科学中国人(2015年26期)2015-03-12 03:17:05
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:27