
CORS支持下的超站仪快速坐标测量算法分析
2017-12-19 07:09:04于广瑞顾广杰曲以春宫联兵
测绘工程 2017年1期
于广瑞,顾广杰,曲以春,宫联兵
(1.61206部队,辽宁 大连 116023;2.中国核工业第五建设有限公司,上海 201512)
CORS支持下的超站仪快速坐标测量算法分析
于广瑞1,顾广杰1,曲以春1,宫联兵2
(1.61206部队,辽宁 大连 116023;2.中国核工业第五建设有限公司,上海 201512)
超站仪是全站仪和GPS接收机的一体化仪器,在CORS网络的支持下,可以实时得到仪器的厘米级精度坐标,通过距离交会,可以实现无定向点设站。文中对该方法做了分析,并进行精度评定。通过实验得出实测结果与理论分析一致,表明文中方法能够满足目前的应用部门对测量的精度要求,且算法简单,方便易行,能极大地提高作业效率,具有一定的工程应用价值。
CORS;超站仪;无定向;坐标测量;算法分析
当前,利用多基站网络RTK技术建立的连续运行卫星定位服务综合系统(Continuous Operational Reference System,CORS)已成为城市GPS应用的发展热点之一。CORS系统是卫星定位技术、计算机网络技术、数字通讯技术等高新科技多方位、深度结晶的产物。
CORS系统由基准站网、数据处理中心、数据传输系统、定位导航数据播发系统、用户应用系统五部分组成。各基准站与监控分析中心通过数据传输系统连接成一体,形成专用网络[1]。GPS实时动态定位(RTK)技术应用于测量领域已经是一项很成熟的技术,使用RTK技术可以方便、快捷、高效、快速地实现高精度的测量作业。RTK(Real Time Kinematic)技术按实现手段可分为两种:一种以通过无线电技术接收单基站广播改正数的常规RTK技术;另一种具有代表性的是基于Internet数据通讯链获取虚拟参考站(VRS)技术播发改正数的网络RTK技术。
传统的测量,如地形、地籍、土地、交通、工程线路、森林、灾害防治、江河湖海水域等测绘工作,无一不需要做控制网或控制点,而对测量对象较少或控制点引入困难的地区,建立控制网是一种不划算的做法,而超站仪可以很方便地解决这些问题,使测绘作业从此彻底摆脱控制网的束缚。本文研究的超站仪快速坐标测量方法,是在使用Smart Station的基础上,不需要棱镜定向,两次使用超站仪观测同一个点,利用前方交会原理进行定向,通过解算,得到自定义零方向与坐标北方向的夹角,然后对每个观测点的坐标进行改正,得到正确坐标。
1 超站仪测量原理
超站仪测量原理如图1所示。
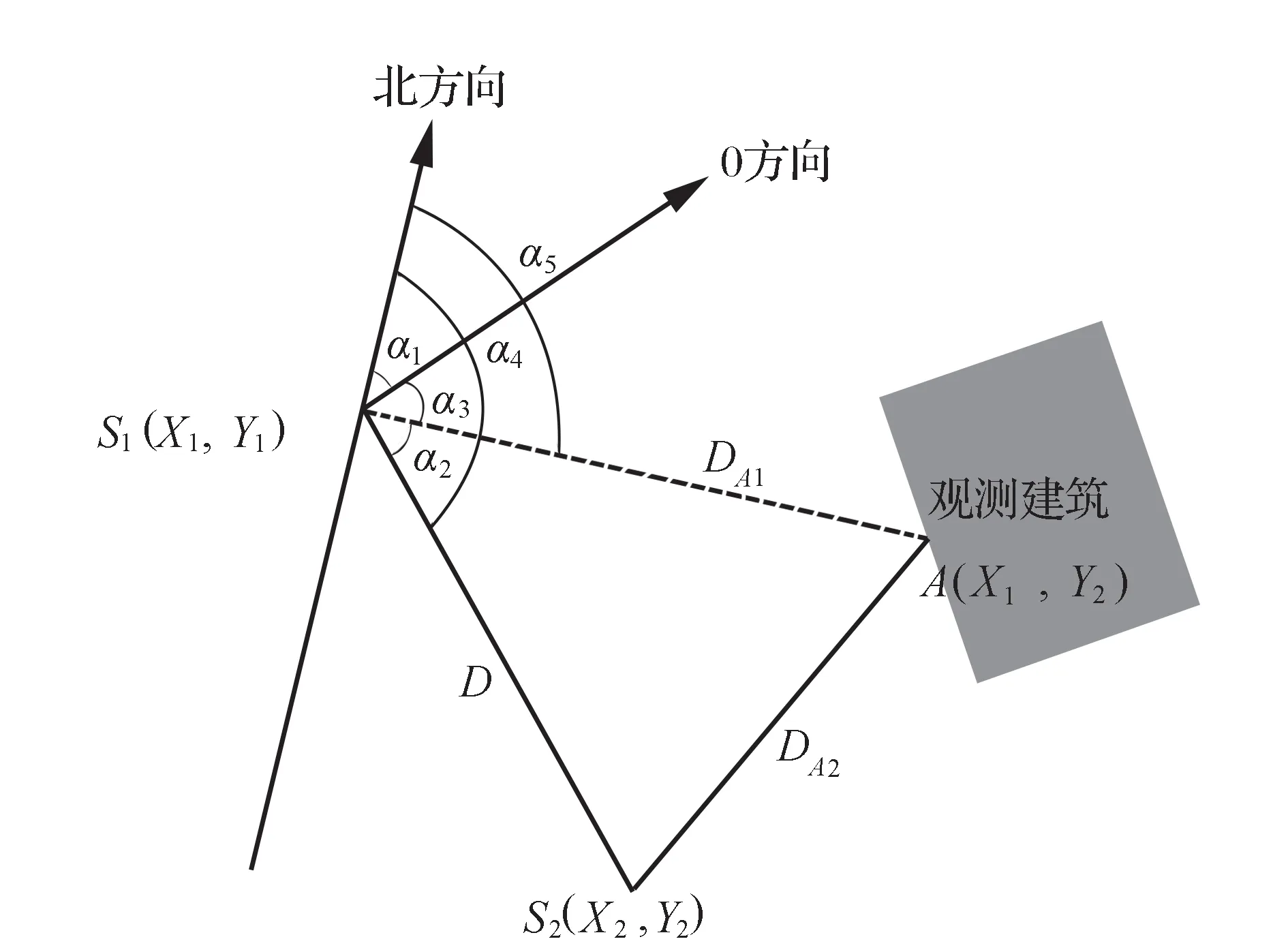
图1 测量原理图
如图1所示,S1,S2为GPS得到的地面控制点,在S1处设站,假定任意方向为0方向对目标点进行观测,得到距离DA1与水平角α3,而后在S2处设站得到目标点距离DA2,计算出北方向与0方向之间的夹角α1对坐标系进行改正。设基线方位角为α4,目标点A的方位角为α5,根据距离前方交会可唯一确定目标点A的坐标[2]。

(1)
(2)
α1=α4-α2+α3,
(3)
α5=α1+α3.
(4)
根据距离交会则可计算出A点的坐标
XA=X1+DA1cos α5,
(5)
YA=Y1+DA1sin α5.
(6)
由于该方法不需要棱镜进行定向,因而也可以叫做超站仪无定向快速坐标测量。
2 超站仪快速坐标测量误差分析
影响目标点定位误差的因素有交会三角形三条边的长度、GPS定位误差、全站仪测距误差、测角误差。根据误差传播定律对整个过程进行精度分析,可以分为定向误差和定位误差两部分[3]。
2.1 定向精度分析
角α2中误差由式(1)依误差传播定律得到,假设全站仪测距中误差相等且相互独立,并用mS表示,GPS定位精度相等且相互独立,用m表示,基线S1S2长度的中误差用mD表示,则有

(7)

由中误差公式可知影响角α2精度的因素有交会三角形三边长度、基线长精度、全站仪测距精度。为了解角α2中误差的变化,作出如下分析:
情况1:假设交会三角形三边长度固定且为50 m,mD,mS的变化范围为0.001~0.06 m,结果如图2所示。
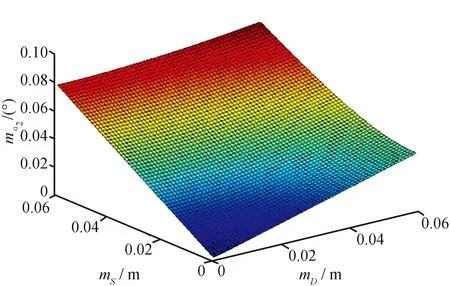
图2 角α2中误差曲面
情况2:假设mD,mS为定值0.01 m,基线长D=50 m。DA1,DA2的变化范围均为25~75 m,结果如图3所示。
图3 目标点位置对角α2精度的影响曲面
综合上述情况可知角α2的精度分别与mD,mS成正比。基线固定时,目标点离基线越近,α2精度越低,离基线越远,α2精度越高。
基线方位角α4由GPS测定的控制点S1,S2的坐标确定,假设GPS定位精度相等且相互独立[4],用m表示。由式(2)依据误差传播定律整理可得
(8)
可知角α4的精度仅与基线长和控制点精度有关。取基线长D的变化范围为10~200 m,GPS定位精度m的变化范围为0.001~0.05 m,结果如图4所示。

图4 基线方位角中误差曲面
分析可知基线方位角α4的精度与基线长度成反比,与GPS定位的控制点精度成正比。
对于坐标系改正角α1由式(3)依误差传播定律可得

(9)
可知定向精度分别与角α2,α3,α4的精度成正比。
2.2 定位精度分析
目标点方位角α5由式(4)依误差传播定律可得

(10)
α1为坐标系改正角,即为定向角[5]。经定向精度分析可知其误差波动范围大约为0.000 1~0.005(弧度制)。α3为全站仪观测角,其测角误差依全站仪的不同在5″范围内波动。
目标点横坐标定位精度由式(5)依误差传播定律可得

(11)
由误差公式可知影响定位精度的因素有目标点方位角α5的大小以及精度,距离DA1。现在主要讨论目标点方位角α5的大小以及精度对定位精度的影响。
取距离DA1为50 m,GPS定位精度为0.01 m,全站仪测距精度为0.01 m。则可得到目标点横坐标精度与角α5以及其精度的关系曲面,如图5所示。
图5 目标点横坐标中误差曲面
图5表明,当目标点方位角精度较高时,其大小对横坐标精度影响较小;当目标点方位角精度较低时,其大小对横坐标精度影响较大,当α5=90°时横坐标精度最低。
目标点纵坐标定位精度由式(6)依误差传播定律可得

(12)
取距离DA1为50 m,GPS定位精度为0.01 m,全站仪测距精度为0.01 m。则可得到目标点横坐标精度与角α5以及其精度的关系曲面,如图6所示。
图6 目标点纵坐标中误差曲面
图6表明,当目标点方位角精度较高时,其大小对横坐标精度影响较小;当目标点方位角精度较低时,其大小对横坐标精度影响较大,当α5=90°时横坐标精度最高。
2.3 分析结论
经过精度分析可知,影响定位精度的因素有目标点方位角α5和距离DA1。由于实地测量中北方向未知,因而方位角α5以及距离DA1属于不可控制因素。但当目标点方位角的精度较高时,其余因素的影响将会大大减小。目标点方位角的精度取决于定向精度,因而无定向测量的关键在于定向点的选取。
3 实验设计与实现
3.1 方案设计
经过精度分析可知,影响目标点点位精度的主要因素是定向角α1的精度。而定向角α1的精度又取决于交会三角形三条边的长度,即目标点的位置。本实验通过不同定向点的选取来验证目标点位置对点位精度的影响。
实验场地选取某单位院内,如图7所示。定义局部坐标系,以控制点S1为起算点,坐标为(100,100),基线S1S2为X轴方向。选取地面的固定点(1-10)作为目标点。
具体实施方案如下:
1)在S1处设站,以S2为定向点进行点位测量,记录目标点的坐标。
(1)年满三岁的小朋友应隔一段时间到正规的视光中心进行全面的视力检查,建立视觉档案,以便视觉训练师了解孩子未来视力的情况,做出针对性预防方案。
图7 实验场地及控制点示意图
2)在S1处设站,任意方向为0方向对目标点进行观测(为简化观测,仍选择原方向为观测方向),记录距离和水平角[6]。
3)在S2处设站,对目标点进行观测,记录距离。
3.2 实验结果分析
两个基准点的坐标分别为S1(100,100),S2(139.529,100),得到观测数据,其中以目标点2作为定向点得到的结果如表1所示。
由中误差公式m=±([ΔΔ]/n)计算得到点2的测量中误差为mdx=±0.32 m;mdy=±0.68 m。
以目标点6作为定向点得到的结果如表2所示。
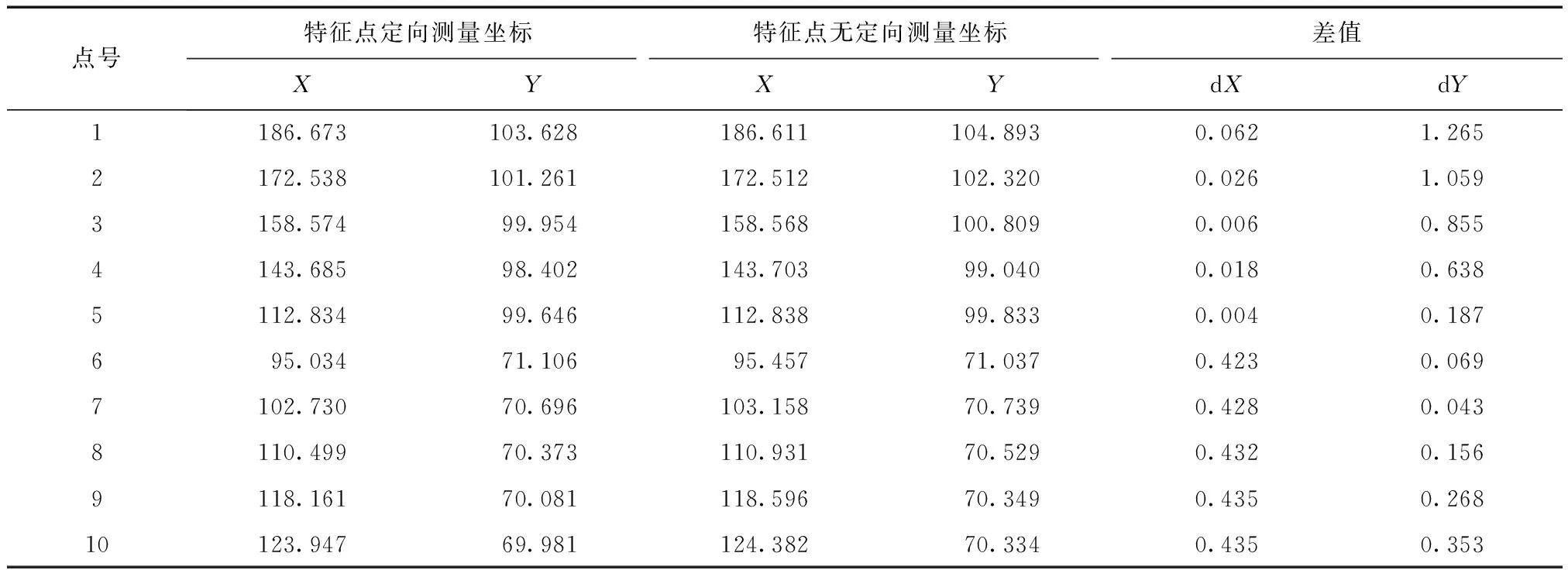
表1 点2定向结果 m

表2 点6定向结果 m
计算得到点6的测量中误差为mdx=±0.01 m;mdy=±0.02 m。
4 结束语
随着科技的发展,传统的测量已渐渐不能满足人们对测量效率与精度的需求,如何进行高效并且高精度的测量工作是摆在人们面前最现实的问题[7]。
本文提出的超站仪无定向快速坐标测量方法,介绍的算法具有简单易行、操作方便等特点,理论分析与实测数据证明,只要选取合适的定向点,该方法的精度完全可以满足许多行业对测量精度的要求。
[1] 隋立芬,宋力杰.误差理论与测量平差基础[M].北京:解放军出版社,2004.
[2] 范百兴,夏治国.全站仪无棱镜测距与精度分析[J].北京测绘,2004(1):28-30.
[3] 高星伟,刘经南,葛茂荣.网络RTK基准站间基线单历元模糊度搜索方法[J].测绘学报,2002,31(4):305-309.
[4] 张峰.基于多参考站网络的VRS技术算法研究与实现[D].郑州:信息工程大学,2007.
[5] 刘经南,刘晖.连续运行卫星定位服务系统——城市空间数据的基础设施[J].武汉大学学报(信息科学版),2003,28(3): 259-264.
[6] 李广云,李宗春.工业测量系统[M].北京:测绘出版社,2010.
[7] 阴朋,徐然.超站仪在动态物体轨迹测量中的应用[J].测绘通报,2012(4): 101-102.
[责任编辑:刘文霞]
Analysis of fast measuring algorithm for thesuperstation instrument under CORS
YU Guangrui1,GU Guangjie1,QU Yichun1,GONG Lianbing2
(1.Troops 61206,Dalian 116023,China;2.China Nuclear Industry Fifth Construction Co.,Ltd.,Shanghai 201512,China)
The superstation instrument is the integrated instrument of total station and GPS receiver.The instrument can be real-time centimeter level coordinates under the CORS network support which can set up station without directional points through distance intersection.In this paper,the method is analyzed,and the accuracy of the method is evaluated.The conclusion of measured results are in agreement with the theoretical analysis,and the method can meet the accuracy requirements of the application department.This method can greatly improve the work efficiency through simple algorithm and convenient way,which has achieved a certain applicative value.
CORS; superstation instrument; non-directive; coordinate measurement; algorithm analysis
引用著录:于广瑞,顾广杰,曲以春,等.CORS支持下的超站仪快速坐标测量算法分析[J].测绘工程,2017,26(1):51-54,60.
10.19349/j.cnki.issn1006-7949.2017.01.011
2015-12-18
于广瑞(1988-),男,助理工程师.
P228.4
A
1006-7949(2017)01-0051-04
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
初中生学习指导·中考版(2022年3期)2022-03-25 16:05:28
卷宗(2021年2期)2021-03-09 07:57:24
新课程·上旬(2020年36期)2020-12-29 12:05:39
中学生数理化·七年级数学人教版(2020年4期)2020-08-10 09:24:30
空间科学学报(2020年4期)2020-04-22 01:17:04
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
河南科技(2015年18期)2015-11-25 08:50:14
中学生天地·高中学习版(2013年5期)2013-04-29 00:44:03
