
某铝土矿低空无人机遥感测绘成果精度分析
2017-12-19 07:53:28贺跃光杜年春
测绘工程 2017年1期
刘 聪,贺跃光 ,陈 帅,杜年春
(1.长沙理工大学 交通运输工程学院,湖南 长沙 410114 ;2.湖南工程职业技术学院,湖南 长沙 410151;3.中国有色金属长沙勘察设计研究院有限公司,湖南 长沙 410011)
某铝土矿低空无人机遥感测绘成果精度分析
刘 聪1,贺跃光1,陈 帅2,杜年春3
(1.长沙理工大学 交通运输工程学院,湖南 长沙 410114 ;2.湖南工程职业技术学院,湖南 长沙 410151;3.中国有色金属长沙勘察设计研究院有限公司,湖南 长沙 410011)
对于分布散、范围大的铝土矿区,传统测量手段及时获取满足精度要求的矿区测绘资料具有一定难度。采用低空无人机遥感技术,能够快速提供矿山建设所需要的数字线划图、数字高程模型及数字正射影像,实现矿山的数字化与信息化建设。结合某铝土矿测绘面积大、矿区地物要素较少的测绘特征,通过无人机影像快速空三加密以及DLG,DEM,DOM的制作技术,获得低空无人机遥感测绘成果。通过对解析空三加密点精度分析和GPS实测点检查,表明测绘成果满足1∶2 000测图精度要求。
铝土矿山;低空无人机遥感 ;空三加密;精度分析
铝土矿是用来生产金属铝的原料。随着科技进步,经济发展,人类对于铝的需求越来越大。2000年以来,全球每年对于铝的需求量以5%~10%的比例逐步增加。我国虽然拥有丰富的铝土矿资源,同时也是一个铝金属需求量大的国家[1]。根据我国铝土矿藏和开采的特点,采取先进技术进行可持续开发利用,提高铝土矿的利用率和采收率具有重要意义。
低空无人机遥感的应用,我国属于起步较晚的国家,直到20世纪末,我国的第一部无人机才由中国测绘科学院牵头研制出来,并完成无人机的关键性试验。从事GPS无人机遥感研究多年的尹金宽[2]等人通过无人机采集数据来完善地形图,完成公路选线的工作,证明低空无人机遥感在大比例成图上的可行性。王鸿鸽[3]利用无人机航测在矿山测绘中的实际应用,获得的数据精度完全满足航测内业相关的测图规范要求,使得低空无人机遥感测量在大比例尺测图中的应用得以实现。从事多年矿山测量的张忠[4],结合多年的切身经验,分析低空无人机遥感测量的特点和适用范围,论述在矿山测量方面无人机测量的方法。李崇伟等对利用非量测型无人机影像开展大比例尺数字成图进行探讨[5]。
1 某铝土矿山的特点及测量要求
某铝土矿是大型岩溶堆积型铝土矿,在面积为1 750 km2的区域内拥有5个矿区。铝土矿的总储量约为2亿t。矿区内的铝土矿主要有3种不同的矿床类型,分别为残积型、原生沉积型和岩溶堆积型。其中矿石的主要类型为高铁—水硬铝石、中铝等。堆积型铝土矿一般产自第四纪红土层中,岩层厚度一般为3~24 m左右,表现为明显的三元结构[6]。
某铝土矿主要存在于地层表面,露天堆积,矿土共存,具有分布散,分布范围广等成矿特征。对于获取矿区的地形资料而言,作业面积广,矿区覆盖面大。矿区测绘主要是建立矿区的测量控制网、测绘或补测矿区的地形图,进行地上地下各种工程的施工监测,反映各种生产现状的采掘工程图和专用图,验收采掘(剥)充填工程量和生产量。而作为铝土矿区的基础之一的地形图,其资料的准确性和实时性直接影响到后期的矿山建设和生产。
使用先进的无人机驾驶技术、遥感传感器技术、遥测遥控技术、GPS差分定位技术和通讯技术等相配合组成的无人机遥感技术,能够方便快捷获取有关地理信息、自然资源和空间环境等信息,完成对遥感数据的处理、建模、分析及应用。低空无人机凭借其操作简便、灵巧、组装方便、易于携带等优势被广泛应用于地理国情、地质灾害等监测中,取得较好效果,同时低空无人机遥感在铝土矿山测绘中具有较强适应性。
传统的铝土矿山测量采用各种测量技术,对矿区进行地形数据采集。随着时代进步,对矿山测绘的需求也越来越高。有异于传统测绘,现代矿山测绘不仅包括矿区地物地貌几何关系数据采集,还包括各种目标地物信息采集,如目标区域影像数据采集和处理,目标范围内基本现状、环境等监测工作。所以低空无人机遥感技术的发展,对于现代铝土矿山测量,具有很好的应用前景[7]。
铝土矿山地形成图比例尺一般小于1∶2 000,同时矿区地物要素较少,对地物精度要求不是很高。虽低空无人机在飞行姿态和影像质量方面存在局限性,使用低空无人机遥感进行数字矿山的测绘完全能够满足铝土矿山建设与生产的要求[8]。根据矿山测量规范及某铝土矿山的地形测绘基本要求,采用北京54坐标系、黄海高程为基准,成图比例尺为1∶2 000[9-11]。具体技术参数如表1~表3所示。
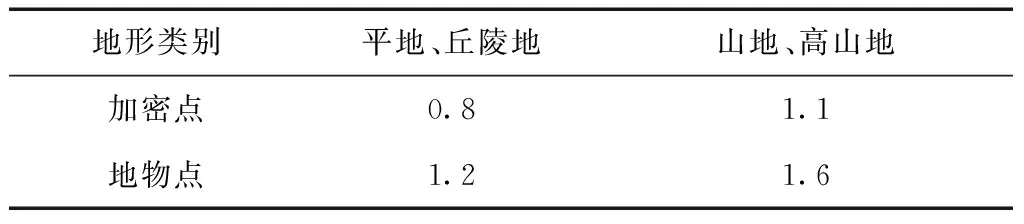
表1 DLG平面中误差 m
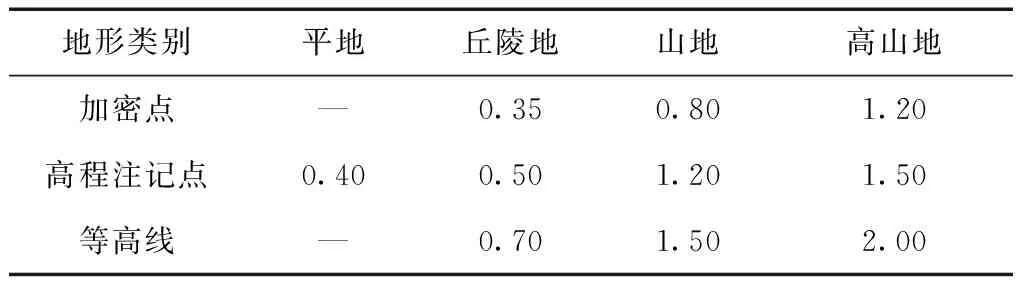
表2 DLG高程中误差 m
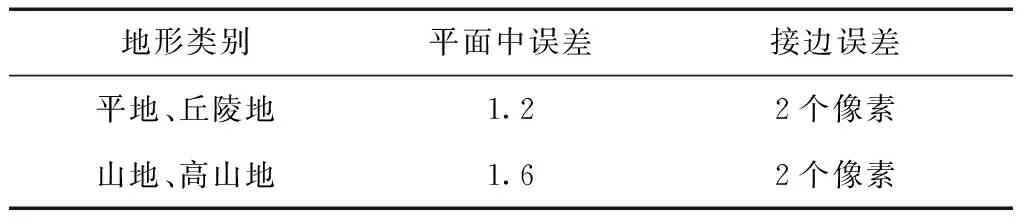
表3 DOM平面位置中误差 m
2 低空无人机遥感测绘应用
2.1 无人机影像快速空三加密
1)数据准备。根据航飞示意图,准备所有影像及其连接模型,存放在文件夹image。
2)工程自动内定向。内定向是根据像片框标及相机参数,恢复相机与影像的相对位置。内定向的目的是建立像方坐标系。通过空中三角测量软件DATmatrix,导入相片的框标坐标和相应摄影机的待定参数。
3)连接点的自动提取。DATmatrix包含有自动转点功能,根据要求逐个对相邻两张影像进行同名点的选取,生成影像连接点。工程的所有影像进行内定向后,执行自动转点操作。
4)交互编辑。自动转点产生大量连接点后,在工程区域四周的影像上刺入外业GPS控制点(属性设置为控制点,输入相应的坐标数据),查看在平铺视图下影像连接点的分布情况,在影像上缺少连接点的地方人工添加点,编辑、删除不好的连接点之后,进行patb初次平差。了解连接点的精度情况,应查看是否有影像局部上没有连接点,或者航带间没连接点等情况,补充连接点,编辑争议点列表里的点,删除误差过大的争议点,进行平差解算。多次平差解算后,在patb界面上重新设置sigma值,迭代运算后sigma的新取值应与之前解算设置sigma值相同,平差解算后编辑争议点信息,直到没有争议点。
5)空三加密。根据空三的预览功能,将连接点剔除后,接下来进行空中三角测量。在数据迭代过程中会出现无法完成,或者误差较大的情况,对此可通过调节权重的大小,反复试验几次,剔除误差较大的点后,设置权值与影像分辨率接近的值,然后通过patb完成空三加密。
6)输出空三成果。在DATmatrix软件中,将空三加密处理成果(.xml)文件导出,以便后期DLG、DEM、DOM等的制作。
2.2 DLG、DEM、DOM的制作
1)制作DLG。根据前面的空三成果,在Mapmatrix上建立影像的立体模型,调用Featureone特征采集工具,进行数字化测图,输出DLG成果。
2)制作DEM。在区域网平差结果满足作业要求的基础上,可以根据定向的结果进行核线重采和样影像匹配。设置好格网间距和等高距生成DEM,也可以通过数字线划图生成数字高程模型。
3)制作DOM。先对影片进行匀光、匀色,然后通过数字高程模型,在易平图软件上对正射影像拼接、裁剪,最后对正射影像变形区域,通过纠正过后的原始影像进行修护,得到DOM。
2.3 精度分析
2.3.1 理论精度
空三加密采用光束法局部平差法,用软件patb完成。本工程文件夹下会自动生成平差报告文件(.pri),打开(.pri)文件查看解算精度及是否有警告或错误信息[12]。报告包括初始定向参数、初始地面坐标、像点的坐标及残差,控制点的坐标及残差,加密点坐标。平差报告如图1、图2所示。
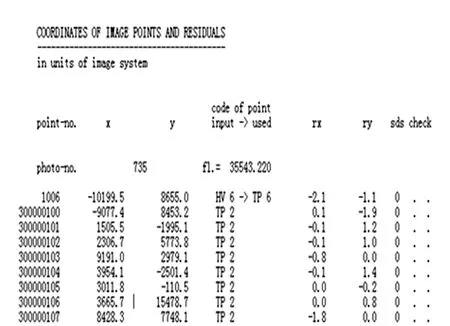
图1 像点坐标及残差
图1记录的是像点的坐标及残差,sigma naught 2.02=0.053,表示记录像点精度为2.02,单位u,0.053单位为m,如果rx,ry或者rz的值大于3倍中误差时,会出现*当成粗差点处理,组号设置成21。由图1可知,本次像点中误差在1/2个像素以内,满足连接点的精度要求。
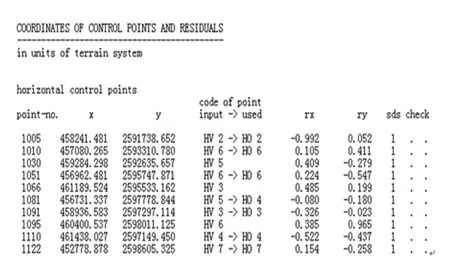
图2 控制点的坐标及残差
图2记录的是像点的坐标及残差。最后两列代表残差与中误差的比值,如果比值小于1,用“.”标记。
2.3.2 实测精度分析
区域网平差计算结束后,对于成果加密的中误差一般采用检查点(多余相片控制点,不参与平差)的中误差进行估算,对于某铝土矿,在进行控制点位判刺时,通过刺入检查点,同时将检查点的权值设为0,用平差软件进行平差。通过分析检查点的GPS外业量测坐标与对应位置加密点的坐标数据,比较两者坐标数据差值,计算平面点位的中误差。精度分析见表3。
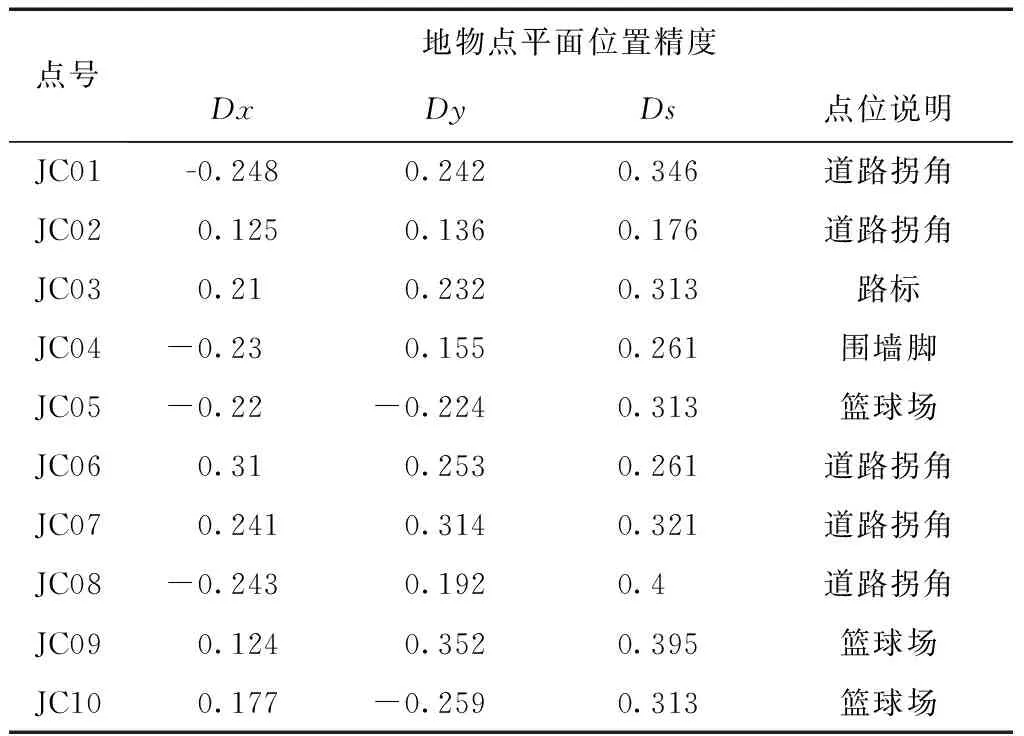
表3 精度分析表 m
由图3可以看出,检查点的点位误差在0.5 m以内,满足规范2倍点位误差的要求。
根据中误差算式
得出X方向的点位中误差Mx=0.230 498,Y方向的点位中误差My=0.256 616,平面点位中误差:Ms=0.344 897。根据《低空数字航空摄影测量规范》与《低空数字航空摄影测量内业规范》,1∶2 000地形图单点定位的绝对精度为0.5 m,此次精度完全满足矿山测量对数据的要求。
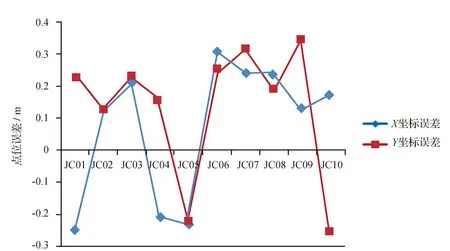
图3 点位误差分布
3 结束语
分析铝土矿山的特点及测绘要求,运用低空无人机遥感技术,生成3D成果产品,分析低空无人机遥感技术在铝土矿山测绘中的应用。通过光束法局部平差、GPS外业坐标数据与检查点的坐标数据分析,结合这两种方法,并对低空无人机遥感的成果精度进行分析,得出完全满足精度要求的矿山成果数据,成功地将低空无人机遥感技术应用到铝土矿山的测绘中。
[1] 杨珊.平果堆积型铝土矿厂址选择优化研究[D].长沙:中南大学,2009.
[2] 尹金宽,林宗坚,邓洪亮,等.UAVDP技术在道路工程应用中的可行性研究[J].测绘科学,2008(1):144-146.
[3] 王鸿鸽.无人机航测在矿山测绘中的实际应用[J].技术与市场,2014(9):55.
[4] 李崇伟,杨丰栓,武坚,等.非量测型无人机影像快速大比例尺数字成图探讨[J].测绘与空间地理信息,2015,39(2):114-116.
[5] 张忠,何宏伟,张建文.基于低空遥感的矿山测量技术研究[J].科技创新导报,2013(10):90.
[6] 王瑞湖,李梅,蒙永坚.广西堆积型铝土矿成矿特征与资源潜力预测[J].地质通报,2010(10):1526-1532.
[7] 段福洲.近地轻型数码航空摄影测量系统研究[D].北京:首都师范大学,2007.
[8] 王有业.无人机技术在数字矿山中的应用[J].山西焦煤科技,2012(12):45-47.
[9] 王欢,蒋显岚.4种无人机遥感影像快速拼接方法的试验分析[J].测绘与空间地理信息,2015,38(8):117-118.
[10] 国家测绘局.基础地理信息数字成果1∶500 1∶1 000 1∶2 000数字线划图:CH/T 9008.1-2010[S].北京:测绘出版社,2010.
[11] 国家测绘局.基础地理信息数字成果1∶500 1∶1 000 1∶2 000数字正射影像图:CH/T 9008.3-2010[S].北京:测绘出版社,2010.
[12] 曹辉.智能空中三角测量中若干关键技术的研究[D].武汉:武汉大学,2013.
[13] 高文革,范永杰,宋倩,等.空三加密在数字摄影测量中的精度分析[J].山东国土资源,2010(12):26-29.
[责任编辑:张德福]
Precision analysis of low-altitude UAV remote sensingmapping results in the bauxite
LIU Cong1,HE Yueguang1,CHEN Shuai2,DU Nianchun3
(1.School of Communication and Transportation Engineering,Changsha University of Science and Technology,Changsha 410114,China; 2.Hunan Engineering Polytechnic,Changsha 410151,China; 3.Changsha Survey and Design Institute of China Nonferrous Metals Co.,Ltd,Changsha 410011,China)
For the distribution of scattered,large-scale bauxite area,it is hard for traditional measurements to have timely access to the mine surveying and mapping data which can meet the accuracy requirements.The low-altitude UAV remote sensing technology is proposed to provide rapid DLG,DEM and DOM for mine construction in order to complete the digital and information construction of the mine.The paper combines the characteristics of a large bauxite area,and less feature elements of mine with the UAV images quickly air triangle encryption and DLG,DEM,DOM production technology,to have access to low-altitude UAV remote sensing and mapping results.Through the theoretical analysis of data precision adjustment and GPS actual accuracy analysis,it shows that mapping results comply with the 1∶2 000 mapping accuracy.
bauxite mountain; low altitude UAV remote sensing; air triangle encryption; accuracy analysis
引用著录:刘聪,贺跃光,陈帅,等.某铝土矿低空无人机遥感测绘成果精度分析[J].测绘工程,2017,26(1):17-20.
10.19349/j.cnki.issn1006-7949.2017.01.004
2015-10-21
刘 聪(1991-),男,硕士研究生.
P237
A
1006-7949(2017)01-0017-04
猜你喜欢
河南城建学院学报(2020年3期)2020-08-14 01:08:38
北京航空航天大学学报(2017年9期)2017-12-18 07:12:31
汽车文摘(2016年6期)2016-12-07 00:23:38
南方文学(2016年3期)2016-06-12 13:54:34
中国房地产业(2016年8期)2016-03-01 01:26:16
兵器知识(2016年2期)2016-01-29 16:45:07
电测与仪表(2015年3期)2015-04-09 11:37:22
交通建设与管理(2015年15期)2015-03-20 15:19:26
河南科技(2014年7期)2014-02-27 14:11:09
地质找矿论丛(2014年2期)2014-02-27 09:31:31
