基于最优数据压缩的雷达和ESM间断点迹融合跟踪
2017-12-18 08:14王永安李世忠王国宏
指挥控制与仿真 2017年6期
王永安, 李世忠, 王国宏
(1. 91880部队, 山东 胶州 266300; 2. 海军航空大学信息融合研究所, 山东 烟台 264001)
基于最优数据压缩的雷达和ESM间断点迹融合跟踪
王永安1, 李世忠2, 王国宏2
(1. 91880部队, 山东 胶州 266300; 2. 海军航空大学信息融合研究所, 山东 烟台 264001)
雷达和ESM传感器均是飞机重要的信息获取手段,但当对己方雷达的辐射进行控制,且敌方雷达也间歇工作时,可能出现雷达和ESM均测量间断的问题。针对该问题,提出了一种基于最优数据压缩的雷达和ESM间断点迹融合跟踪方法,有效解决了雷达和ESM量测间断的问题。并且针对传感器不同测量精度、传感器不同数据率和雷达不同关机时长对融合精度的影响进行了仿真分析。仿真结果表明,ESM测角精度是否小于雷达测角精度对融合精度有重要影响,而融合误差则受雷达测量误差的影响相对较大。
雷达; ESM; 跟踪精度; 间断点迹
雷达和电子支援措施(ESM)是最主要的两种机载传感器,具有性能互补的特点,通过对二者的数据进行融合,可实现信息互补,取得单传感器无法完成的功能和效果,改善对目标的探测和跟踪性能[1-3]。文献[4-11]研究了雷达与ESM的数据关联和融合问题,其中,文献[4-5]研究了机载雷达与ESM的关联问题,文献[6]研究了雷达与ESM的误差配准问题,文献[7]研究了雷达与ESM的融合跟踪问题,文献[8]研究了雷达与ESM的综合检测、跟踪和识别问题,文献[9]研究了ESM测量间歇情况下的雷达与ESM的协同跟踪及雷达辐射控制问题,文献[10]研究了修正极坐标系下雷达与ESM航迹对准关联的问题,文献[11]研究了数据链航迹与ESM间断航迹的融合跟踪。
在实际应用中,当敌方雷达关机时,ESM就不能连续获取目标的测量,从而得到间断的目标信息量测;当对己方雷达的电磁辐射进行控制时,雷达也面临间断测量的情况,从而面临雷达和ESM均为间断测量情况下的数据融合问题,而关于这方面的研究尚未见到相关报道。因此,本文研究了雷达和ESM间断量测情况下的数据融合,并对影响雷达和ESM融合精度的多种因素进行了仿真分析。
1 基于最优点迹数据压缩融合处理的流程
雷达点迹和ESM点迹数据融合处理主要有两种方式:一种是序贯处理方式,一种是基于点迹数据最优压缩的处理方式。但序贯处理方式计算量较大,计算复杂度较高,因此从实际工程应用方面考虑,本文主要以第二种方式为对象进行研究讨论。
雷达和ESM点迹数据压缩融合处理的流程如图1所示,主要包括以下步骤:
1)以ESM测量点迹的时间为基准,对雷达点迹进行外推或内插平滑;
2)雷达点迹与ESM点迹进行关联;
3)以外推或内插的雷达点迹为基准,采用最优压缩方法对关联上的ESM和雷达点迹进行融合;
4)对融合后的点迹进行滤波以得到融合航迹,为了避免由极坐标到直角坐标转换带来的误差,可采用无偏不敏变换(UUKF)滤波算法。

图1 ESM点迹+雷达点迹数据压缩滤波流程图
2 雷达和ESM点迹的数据关联和最优压缩融合
本文以方位角θ为例给出数据关联算法。假设在雷达的一个测量周期[tk-1,tk]内ESM有n个量测,即
(1)
设雷达相应量测为θr(k-1)、θr(k),求得ESM量测与θr(k-1)的时间差值,记为Δtn,将ESM的n个量测用下式内插到雷达测量周期内:
(2)
则得到雷达的量测集合:
(3)
于是,可构造如下检验统计量:
(4)

(5)
则说明该雷达周期内的ESM量测与雷达量测为同一目标的量测。
对N个雷达周期进行上述方法的检测,若有M次使得该式成立(如N=4,M=3),则认为ESM量测与雷达量测为同一目标的量测,从而实现了点迹的关联。
首先对雷达和ESM测量的角度数据进行时间对准,然后利用最优压缩方法将对准后的雷达和ESM角度测量数据进行最优压缩,从而得到融合方位角测量值。以目标方位角为例,最优融合方位角为:
(6)

3 航迹起始
为了实现对目标的跟踪,需要对融合测量进行航迹起始。兼顾航迹起始性能和航迹起始时间,这里采用3/4逻辑法对航迹进行起始,在航迹起始中采取如下限制:
1)首先,目标速度要介于最小速度Vmin最大速度Vmax之间;
2)其次,目标加速度绝对值要小于最大加速度amax;当有多个回波的加速度满足约束时,则选择最小加速度绝对值对应的回波。
4 雷达和ESM点迹滤波算法
兼顾性能和计算量,同时也为了避免坐标转换引起的固定偏差,这里采用无偏转换测量[12]Kalman滤波方法。设k时刻雷达的量测向量为
(7)
其协方差为
(8)
由于Z(k)为三维向量,因此选取7个sigma点,即


(9)
其中

(10)
(11)
其中,λ为自由度,此处取λ=0。
令
(12)
其中
(13)
则k时刻雷达新的量测向量为
(14)
相应的协方差阵为

(15)
由此可得到量测方程,然后可按照卡尔曼滤波方法进行滤波处理,即可得到目标航迹。
5 仿真结果分析
5.1 仿真场景及初始参数
假设我方飞机编队有2架飞机,坐标系选为NED坐标系,目标与我方飞机均做匀加速直线飞行,仿真时间100s,等间隔间断4次,导航数据间隔为0.1s,融合数据输出间隔为0.5s,雷达测量周期为0.5s;ESM传感器等间隔间断5次,测量周期为0.1s,ESM和雷达关机时间比例均为0.2;目标初始位置、速度与文献[7]相同。
5.2 传感器误差对跟踪精度的影响分析
设目标与我方飞机均做匀加速直线运动;雷达测距均方根误差σd=100m,雷达方位和俯仰角测量均方根误差均为σR;ESM的方位和俯仰角测量均方根误差均为σE;Monte Carlo仿真100次,分4种情况进行仿真, 4种场景的设置如表1所示,对4种场景进行仿真后的精度比较如表2所示。

表1 不同测量精度的设置
由仿真结果可得如下结论:
1)不管雷达与ESM的测角精度如何变化,融合后距离误差基本不变,说明雷达与ESM点迹融合对测距精度影响较小,这是因为距离精度主要受雷达测量距离测量精度的影响所致。

表2 不同场景下雷达误差与融合跟踪误差比较
2)在方位、俯仰和总体上的融合精度随着ESM精度的下降稍有下降,随着雷达精度的下降,在方位、俯仰和总体上融合后的精度下降明显,由此可见,雷达测量精度对融合精度的影响要明显大于ESM测量精度的影响。
3)当ESM测角精度与雷达测角精度相等时,融合后精度略有提高;当ESM测角精度好于雷达的测角精度时,融合精度高于雷达测量精度,当ESM测角精度低于雷达测角精度时,融合精度低于雷达测量精度,说明当σE/σR≤1时,即ESM精度高于雷达的测角精度时,雷达点迹与ESM点迹融合可以提高跟踪精度。
5.3 传感器数据率对跟踪精度的影响分析
设雷达测距均方根误差σd=0.1km,雷达方位角、俯仰角均方根误差为0.3°,雷达的周期用TR表示; ESM方位角、俯仰角均方根误差为0.5°,ESM的周期用TE表示;目标与我方飞机均做匀加速直线飞行, Monte Carlo仿真100次,3种场景的设置如表3所示,对3种场景进行仿真后的精度比较如表4所示。
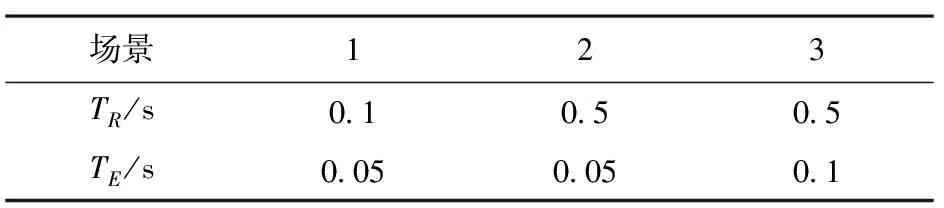
表3 不同传感器数据率情况下的场景设置
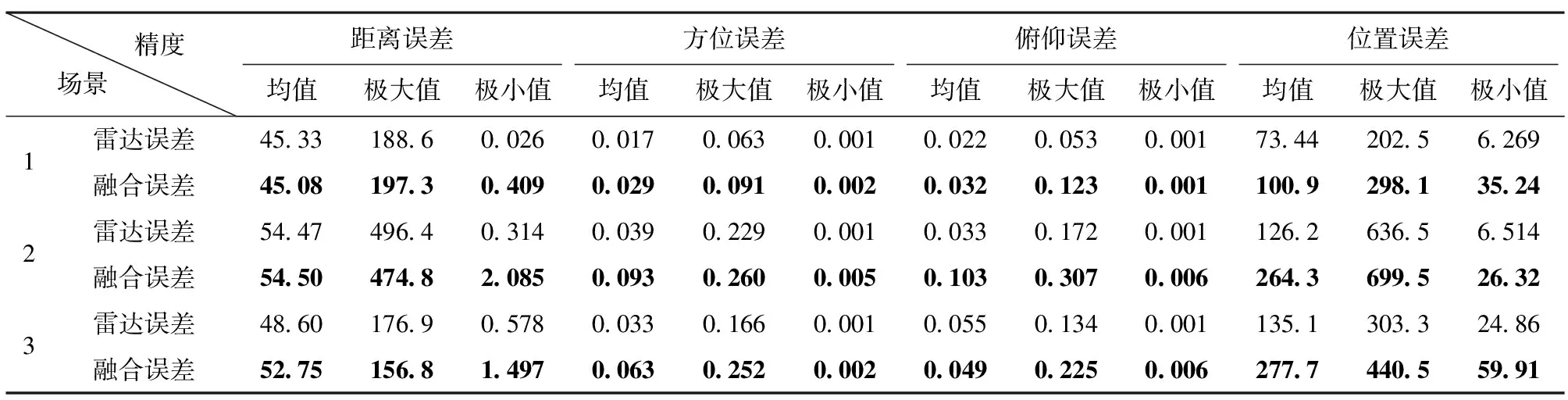
表4 不同场景下雷达误差与融合跟踪误差比较
由仿真结果可得如下结论:
1)当ESM数据率不变时,提高雷达精度可以提高雷达及融合的位置精度;
2)当雷达数据率不变时,系统跟踪精度主要与雷达数据率有关,与ESM数据率关系相对较小;
3)如果ESM的测角精度差于雷达的测角精度,则位置融合精度均略差于雷达位置精度。
5.4 传感器关机时长对跟踪精度的影响分析
设雷达测距均方根误差σd=0.1km,雷达方位角、俯仰角均方根误差为0.3°,雷达的周期TR=0.5s,等间隔间断4次,ESM方位角、俯仰角均方根误差为0.5°,ESM的周期用TE=0.1s,等间隔间断5次,ESM关机时间占总工作时间的20%;。目标与我方飞机均做匀加速直线飞行,Monte Carlo仿真100次。雷达关机时间占总工作时间的百分比用TClose表示,分3种情况进行分析,3种场景的设置如表5所示,对3种场景进行仿真后的精度比较如表6所示。

表5 不同传感器关机时长的场景设置

表6 不同场景下雷达误差与融合误差比较
由仿真结果可得如下结论:
1)当雷达的关机时间占总时间的比例提高时,雷达及融合后的距离、方位、俯仰和位置精度整体上在逐步变差,位置精度的均值下降。
2)如果ESM的测角精度差于雷达的测角精度,雷达关机时间扩大时,融合后位置精度仍然低于融合前雷达的位置精度。
6 结束语
本文对雷达和ESM数据不连续情况下基于最优压缩的融合滤波进行了仿真分析,分别在不同测量精度、不同传感器数据链和不同关机时长情况下对雷达测量精度与融合精度进行了比较。结果表明:ESM测角精度是否小于雷达测角精度对融合精度有重要影响,当ESM的测角误差小于雷达测角误差或者大致相当时,融合航迹误差要小于雷达航迹误差,反之则前者略大于后者;相对而言,融合误差受雷达测量误差的影响相对较大;当雷达和ESM数据率降低时,融合误差均增加;关机时长增加时,融合误差也显著增大。
[1] 何友, 王国宏, 陆大金. 多传感器信息融合及应用[M]. 第2版.北京:电子工业出版社, 2009.
[2] 关欣, 彭彬彬, 衣晓. 基于区间重合度的雷达与ESM航迹关联算法[J]. 雷达科学与技术, 2017, 15(1): 61-67.
[3] 肖林, 王华. 改进的ESM目标与雷达航迹关联方法[J]. 信息化研究, 2016, 42(1): 35-39.
[4] 董红波, 王刚, 刘进忙, 等. 机载雷达与ESM航迹关联技术研究[J]. 传感器与微系统, 2010, 29(1): 12-14.
[5] 陈中华, 王国宏, 刘德浩,等. 基于几何法的雷达与ESM航迹关联算法[J]. 电光与控制, 2012, 19(4): 10-12,22.
[6] 刘德浩, 王国宏, 陈中华. 基于UKF的雷达与ESM误差配准技术研究[J]. 电子测量技术, 2011, 34(6): 26-29.
[7] 张翔宇, 王国宏, 王娜, 等. 基于序贯滤波的机载雷达和ESM融合跟踪[J]. 电子测量技术, 2011, 34(9): 44-47.
[8] 石绍应, 杜鹏飞, 张靖, 等. 雷达与ESM综合多目标检测、跟踪与识别[J]. 系统工程与电子技术, 2016, 38(7): 1524-1531.
[9] 吴巍, 王国宏, 李世忠, 等. ESM量测间歇下雷达/ESM协同跟踪与辐射控制[J]. 现代防御技术, 2011, 39(3): 132-138.
[10] 关欣, 彭彬彬, 衣晓. 修正极坐标系下雷达与ESM航迹对准关联[J]. 航空学报, 2017, 38(5): 221-232.
[11] 王永安, 李世忠, 关成斌. 数据链航迹与ESM间断航迹融合跟踪精度研究[J]. 海军航空工程学院学报, 2012, 27(4): 401-408.
[12] S. J. Julier, J. K. Uhlmann, H. F. Durrant-Whyte. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Trans on Automatic Control, 2000, 45(3): 477-482.
Fusion Precision of Intermittent Radar and ESMData Based on Optimal Data Compression
WANG Yong-an1, LI Shi-zhong2, WANG Guo-hong2
(1. Unit 91880, Jiaozhou 266300, China; 2. Institute of Information Fusion Technology, NAAU, Yantai 264001, China)
Both radar and ESM fusion are important sensors in airborne information processing. When the radar sensors are under the condition of radiation, the radar and the ESM sensors cannot get the measurements continuously. Aiming at this problem, a method of fusion precision of intermittent radar and ESM data based on optimal data compression is proposed in this paper. And the problem of radar and ESM measurement interruption could be effectively solved using this method. In addition, this paper studies the influence of the radar and ESM sensors’ precision and data rate as well as the length of shut down time on the fusion performance. Simulation results show that whether the ESM angle measuring accuracy is smaller than the radar angle measuring accuracy has an important influence on the fusion accuracy, and the fusion error is affected by the radar measurement error largely.
radar; ESM; fusion precision; intermittent data
1673-3819(2017)06-0038-05
TN953;E933.6
A
10.3969/j.issn.1673-3819.2017.06.009
2017-09-16
2017-09-20
王永安(1972-),男,山东即墨人,高级工程师,研究方向为雷达数据处理。李世忠(1980-),男,博士,工程师。王国宏(1963-),男,教授,博士生导师。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
火控雷达技术(2021年1期)2021-04-20
雷达科学与技术(2020年4期)2020-09-11
飞天(2019年6期)2019-07-08
计算机测量与控制(2018年10期)2018-10-18
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
新高考·高二数学(2015年2期)2015-05-27
新高考·高二数学(2014年7期)2014-09-18