
基于改进鱼群算法的草莓光环境智能调控管理模型
2017-12-16 09:02赵瑜
农机化研究 2017年7期
赵 瑜
(江苏食品药品职业技术学院,江苏 淮安 223003)
基于改进鱼群算法的草莓光环境智能调控管理模型
赵 瑜
(江苏食品药品职业技术学院,江苏 淮安 223003)
草莓的产量与质量与其光合作用的效率有重大关系,而作物的光合效率主要由环境温度和光子通量密度决定,如何实现在不同环境温度测量光饱和点值,是农作物光环境智能调控发展必须决定的问题。为了解决上述问题,采用非线性回归方法,提出了基于改进鱼群算法的草莓光环境智能调控管理模型,通过自动调整鱼群个体视野和步长状态,提高该算法全局寻优性能和搜索精度,并实现不同温度环境下植物光饱和值的精确寻优。试验结果表明:模型计算值与实测值关联性非常高,两者最大相对误差在6%以内,精度值较高,能够较好地满足光合速率调控需要。
光合作用;鱼群算法;草莓;光环境;智能调控
0 引言
植物的光合作用是一个光生物化学反应,其随着光照强度的增加而加快,当作物光照强度很低时会抑制植物茎的生长、减少干物质积累、导致植物生长缓慢等问题,直接影响农作物的产量和品质。合适的环境温度和光强度可以明显提高草莓叶片的光合效率、蒸腾作用及光饱和点,从而提高果实的质量和产量。为了实现在不同环境温度测量植物的光饱和值,本文以多因子耦合的草莓光合速率模型为基础,设计了基于改进鱼群算法的光温寻优方式,实现不同温度环境下的光合速率与光饱和点的测量,从而建立以最大光合速率为目标的草莓光环境智能调控管理模型。同时,该模型进行相关试验以及对试验结果进行分析,证实模型的准确性。
1 人工鱼群算法概述
人工鱼群算法具有3方面特点:①算法初始值不唯一,往往能够随机产生或成为固定值;②算法对目标函数没有太高要求,可以进行全局寻优搜索;③算法可以进行并行处理,处理速度快。人工鱼群算法的基本思想是:在某一水域中,鱼最多的地方就是其营养成分最高的地方,依据该特性可以来模仿鱼群寻找食物、聚群、追尾等行为,然后求出最优解,即该算法主要利用鱼群中单一个体的觅食、聚群、追尾等个体行为,并结合鱼群相互协作的能力寻找目标函数最优解。假设在某水域中,一人工鱼群由N个个体组成,其状态可表示为
(1)
其中,Xi为需要求解的变量值;Y为求最优解的目标函数;d为鱼群个体间的距离。基本人工鱼群的行为可以描述为以下几点:
1)随游行为。随游行为是指人工鱼在规定区域内随机移动的过程,是鱼群个体在觅食中一种缺省状态。当鱼群发现附近水域食物浓度低于其所处位置时会采取随游状态,其会按照式(2)移动,移动后食物浓度可能并不理想。
Xj=Xi+rand()·Step·visual
(2)
其中,rand()是0和1之间的随机数;Step为个体移动最大步长;visual为个体可视范围。个体在寻找食物的过程中,其以最小重复尝试次数T-num(T-num为人工鱼单次寻找食物最大尝试值)找到食物时,为个体提供了随机游动的可能性,使鱼群多样性增多,降低了局部极值的限制程度。
2)追尾行为。追尾行为是指个体Xi在规定区域内寻找最优伙伴Xj的行为,若Yj/nf>δYj(δ为拥挤度因子),说明最优伙伴附近空余空间比较多,则可以向Xj移动一步,不然采取觅食行为。
3)聚群行为。聚群行为是指个体在游动中为了生存和躲避危害聚集在一起,成为一个群体 ,鱼群聚在一起需要具备分隔、对准和内聚3个规则。假设人工鱼Xi附近伙伴数目为nf,鱼群中心位置为Xc,若Yc/nf>δYj,则说明该伙伴附近空余空间比较多,位置状态较优,则Xi朝该中心位置前进一步;不然,采取觅食行为。
4)觅食行为。觅食行为是指个体朝着食物浓度高区域的一种移动行为。比如,个体Xi在可视区域随机选择目标对象Xj,并分别计算其目标函数值,若Yj比Yi大,则Xi朝着Xj前进一步;否则,Xi继续在visual区域内寻找Xj,并对其食物浓度进行判断,反复尝试T-num次后,若仍没有发现更优解,则随机前进到一新状态。
2 智能调控管理模型建立的材料和方法
2.1 模型试验环境与材料
为了验证草莓光环境智能调控模型的有效性,2015年9月至2016年2月在某温室种植基地一个草莓大棚进行了试验。测试草莓品种为章姬(又称牛奶草莓),将优良的草莓种子经温汤浸种后,播种于育苗圃中。为了减少秧苗根系的损伤,在挖苗前,对育苗圃浇1次透水,然后进行定植。大棚栽培株距20cm左右,每棚种植1 800株左右。草莓苗采用定向种植,中间5畦每畦种植2行,尽量靠两旁种,行间距为30cm左右。在试验期,施肥、浇水按草莓常规种植的方式进行,期间不喷施农药。
2.2 试验方法
试验检测采用北京益康农研发生产的ECA-PB0402光合测定仪,主要测定指标为叶室温度、叶室湿度、叶片温度、二氧化碳浓度和光合有效辐射,可以在设定叶室小环境模式下,测定植物净光合速率。其中,该仪器工作的环境温度范围为-20~50℃,相对湿度0~100%,温度阶梯为18、22、26、30、34℃, LED光源可调范围为0~1 500μ mol/m2·s。在试验中,一共进行60组,根据不同梯度温度和光照对番茄幼苗的光合速率,对幼苗测试,每组试验可以获得36个实验数据,整个试验形成2 160个光合速率样本集。
2.3 模型建立的方法
首先,根据试验测试的数据建立草莓幼苗光合速率模型并求出其目标函数;然后,基于改进鱼群算法建立光合速率模型,实现设定叶室小环境模式下的光温耦合寻优;最后,根据最优解结果建立草莓光环境智能调控管理模型。草莓光环境智能调控管理模型流程图如图 1所示。
模型利用多元非线性回归方法,建立光强度和温度相结合的草莓光合速率模型,其表达式为
Pn=f(T,D)
(3)
其中,Pn为草莓幼苗的光合速率(μ mol/m2·s);T为温度(℃);D为光强度密度(μmol/m2·s)。

图1 草莓光环境智能调控管理模型流程
模型建立时,在16~36℃温度范围中,首先要设定特定求优温度点,然后根据测量值建立寻优的温度样本集。温度样本集表达式为
T=(T1,T2,…,Tl)
(4)
Tl=18+2(m-1)
(5)
其中,l为1~9区间内的整数。在此基础上,以寻优温度样本集建立的模型,然后根据试验需要设定不用温度梯度进行幼苗光合速率测定,从而建立丰富的寻优目标函数,其表示式为
Fm=f(Tm,D)
(6)
本文以寻优温度样本集,建立草莓光合速率模型,然后提出了基于改进鱼群算法的光环境智能调控优化算法,从而完成各温度梯度下光合速率目标函数最优值的求解问题。由于常规鱼群算法在觅食、聚群、追尾和随机等行为中,容易受到Step和visual的影响,visual值越大,该算法全局搜索和收敛效果越好,反之,局部搜索能力越强;另外,Step越大,则收敛越快,反之,则收敛越慢,寻优精度值越高。因此,本文通过对步长Step和视野范围visual的动态调整,实现对常规鱼群算法的改进,使寻优速度和精度同时达到最优值。
在设定固定温度点求最优光合速率目标值过程中,目标函数为区域位置的食物状态。模型首先随机生成人工鱼群,其个体状态为X= (xi, x2,…, xi,…, xn),xi为待求解的光强度密度D;然后利用特定温度点的寻优目标函数作为寻优食物浓度Y,根据Ym=Fm计算食物状态并完成评价,不符合要求时,则改进并继续寻优。
在特定温度点求最优目标值的过程中,改进鱼群算法的视野和步长满足方程式
(7)
其中,v和st分别为当前改进鱼群算法的视野和步长;vi-1和st-1分别为前次改进鱼群算法的视野和步长;vmin和smin分别为视野和步长的最小值;a为智能调节系数。由式(7)可以看出:在视野和步长初始值确定的情况下,其大小由智能调节系数决定。因此,视野和步长的变化步调相同,且都与a有关,本文中a的调节函数为
a=exp[-30(t/T)s]
(8)
其中,t和T分别为当前和最大迭代次数;s为变化速率,是区间[0,10]上的整数。a的取值由s决定,s取[0,10]之间不同值时,a的变化曲线如图2所示。
由图2可知:s取值越大,改进鱼群算法前期全局搜索所占时间越长,中期比重先增大后减小,后期进行精细搜索的比重下降趋势明显。另外,由于草莓光环境模型呈单峰函数特征,全局收敛效果明显,在寻找最优值的过程中,s应取较小值,以降低全局搜索所占时间,提高后面局部搜索精度,提高搜索的整体效率。在选取s值进行试验中,发现s为1时寻优效果最好,且能避免振荡现象,因此在本文的研究中,变化速率选取1。
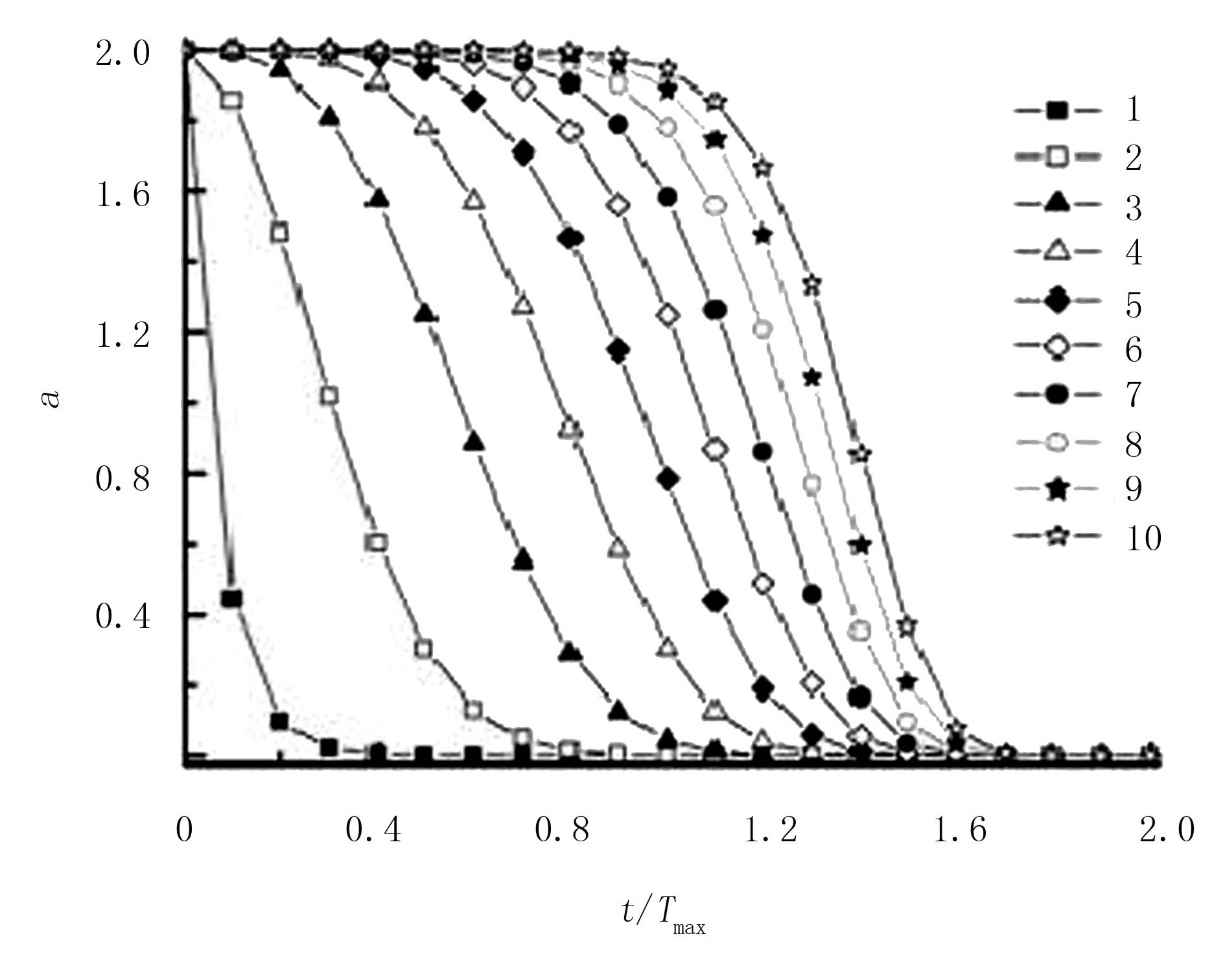
图2 s取不同值时,a的变化曲线
本文采用预处理和非线性回归办法,建立草莓幼苗光合速率模型并求出其目标函数,并基于改进鱼群算法建立光合速率模型进行最优值选取。模型通过调节温度和光饱和点,建立草莓光环境智能调控管理模型,实现温度和光饱和点的动态获取。
3 实验结果分析
3.1 草莓光合作用优化管理模型
根据上文光环境寻优结果分析结果,可以求出光饱和点和温度变化之间的对应关系。不同温度环境草莓幼苗光饱和点如图3所示。
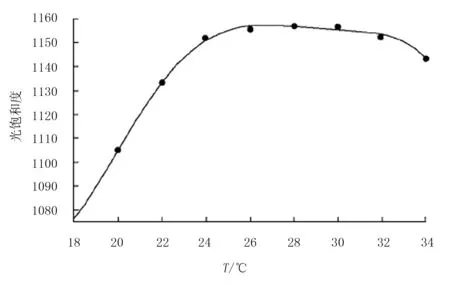
图3 不同温度环境草莓幼苗光饱和点
由图3可以看出:当大棚环境温度在18~22℃左右时,草莓幼苗光饱和点随温度快速升高;当温度升至22~30℃之间时,光饱和点随温度上升而下降。该变化说明,在适当的温度环境下,植物光合速率和光饱和点都会随温度变化而变化。其原因是温度变化直接影响草莓幼苗的气孔导通度,对草莓幼苗的光合能力具有抑制作用,从而引起作物光饱和点与光合作用规律相同。根据上面的分析,以大棚环境问温度T为自变量,草莓幼苗光子通量密度PFD为因变量,可以建立草莓光环境智能调控管理模型,其可以表示为
(9)
式(9)可实现常温光饱和点的获取。曲线拟合系数为0.999。表明草莓光环境智能调控管理模型拟合效果比较好。
3.2 草莓光环境智能调控管理模型的验证
为了验证草莓光环境智能调控管理模型的可行性,本文对光饱和点采集数据值与该模型拟合结果进行对比。验证试验利用异校验办法,在设定叶室小环境及二氧化碳浓度为280μL/L的条件下,采用北京益康农生产的ECA-PB0402光合测定仪,在温度梯度温度阶梯为18、22、26、30、34℃的情况下测定植物光饱和点的实际值。同时,利用光环境智能调控管理模型计算得到相同数量的光饱和点模拟值,将模拟值与试验测得的实际值进行对比分析,观察两者之间的关联性。模拟值与实际值的对比分析如图4所示。

图4 模拟值与实际值的对比分析
由图4可以看出:试验测得的光饱和点实际值与模型计算值之间的决定系数为0.918,拟合曲线斜率为1.009。因此,可以说明,两者之间关联性非常高,两者最大相对误差在6%以内,也表明草莓光环境智能调控管理模型可获取不同温度环境下植物的准确光饱和点,且精度值较高。
4 结论
采用非线性回归方法,提出了基于改进鱼群算法的草莓光环境智能调控管理模型。模型通过自动调整鱼群个体视野和步长状态,平衡了该算法全局和局部收敛的差异,大大提高了该算法全局寻优性能和搜索精度,并能够实现温度梯度环境下植物光饱和值精确寻优。模型计算值与实测值对比表明:两者之间关联性非常高,两者最大相对误差在6%以内,该模型可获取不同温度环境下植物的光饱和点,且精度值较高,能够较好地满足光合速率调控需要,对大棚光环境精准调控具有重要意义。
[1] 胡瑾,樊宏攀,张海辉,等.基于无线传感器网络的温室光环境调控系统设计[J].农业工程学报,2014(5): 160-167.
[2] 胡瑾,何东健,任静,等.基于遗传算法的番茄幼苗光合作用优化调控模型[J].农业工程学报,2014(17): 220-227.
[3] 张芸莉.连栋大棚草莓套种葡萄高效栽培技术[J].现代农业科技,2015(10):86,92.
[4] 王明亮,闵新力,薛君志.基于改进人工鱼群算法的WSN覆盖优化策略[J].微电子学与计算机,2015(6): 78-81.
[5] 刘凌子,周永权.一种基于人工鱼群和文化算法的新型混合全局优化算法[J].计算机应用研究,2009(12):4446-4448.
[6] 黄华娟,周永权.改进型人工鱼群算法及复杂函数全局优化方法[J].广西师范大学学报:自然科学版, 2008(1):194-197.
[7] 王晔,吴小俊,王士同,等.基于改进人工鱼群算法的RBF网络及其在人脸表情识别中的应用[J].计算机应用研究,2008(9):2643-2646.
[8] 刘白,周永权.基于遗传算法的人工鱼群优化算法[J].计算机工程与设计,2008(22):5827-5829.
[9] 王联国.人工鱼群算法及其应用研究[D].兰州:兰州理工大学,2009.
[10] 李尚键.应用改进的人工鱼群算法求解混合流水车间调度问题[D].重庆:重庆大学,2013.
[11] 李会,张天丽,陶佰睿,等.动态分组方案的自适应人工鱼群算法[J].计算机工程与应用,2013(8):58-62.
[12] 赵贵喜,王岩,于冰,等.基于人工鱼群聚类的雷达信号分选算法[J].雷达科学与技术,2013(4):375-378.
[13] 张秋亮.鱼群算法在配电网规划中的应用研究[D].北京:华北电力大学,2008.
[14] 袁远.基于改进人工鱼群算法的配电网无功优化[D].南京:南京理工大学,2008.
[15] 吕盼.基于离散人工鱼群算法的输电网优化规划研究[D].长春:东北电力大学,2009.
[16] 曾科翰.基于混合人工免疫优化算法的机构运动链同构识别研究[D].镇江:江苏大学,2009.
[17] 都伟杰.基于改进鱼群与粒子群混合算法的机组优化组合研究[D]. 南京:南京理工大学,2009.
[18] 陈祥生.人工鱼群算法在聚类问题中的应用研究[D].合肥:安徽大学,2010.
[19] 蔡芸,周立炜.人工鱼群算法在孔群加工路径优化中的应用研究[J].武汉科技大学学报,2011(3):182-185.
[20] 唐雪琴,徐宗昌,甘旭升,等.基于改进人工鱼群算法的WNN优化设计[J]. 现代防御技术,2012(1): 166-170.
[21] 张梅凤,邵诚,甘勇,等.基于变异算子与模拟退火混合的人工鱼群优化算法[J].电子学报,2006(8): 1381-1385.
[22] 刘丁,张新雨,陈亚军.基于多目标人工鱼群算法的硅单晶直径检测图像阈值分割方法[J].自动化学报,2016(3):431-442.
[23] 胡瑾,闫柯,何东健,等.基于改进型鱼群算法的番茄光环境调控目标值模型[J].农业机械学报,2016(1):260-265.
[24] 刘翔.基于光温耦合的设施光环境检测与智能调控系统设计[D].杨凌:西北农林科技大学,2015.
[25] 董吉林,李亚灵,温祥珍.温室光环境模拟模型及结构参数设计系统[J].山西农业大学学报:自然科学版,2003(3):252-255.
[26] 张颖.基于改进鱼群算法的BP神经网络优化研究[D].广州:华南理工大学,2012.
[27] 樊宏攀.基于多因子耦合的光环境调控系统研究与设计[D].杨凌:西北农林科技大学,2014.
Intelligent Control Management Model of Strawberry Light Environment Based on Improved Fish Swarm Algorithm
Zhao Yu
(Jiangsu Food & Pharmaceutical Science College,Huai’an 223003,China)
It has a significant relationship btween strawberry yield and quality and their photosynthetic efficiency. And light crop photosynthetic efficiency is mainly decided by the environmental temperature and photon flux densit. It must decide for crop light environment intelligent control development in order to achieve in different environment temperature measurement light saturation point values. It is proposed the nonlinear regression method based on improved artificial fish swarm algorithm. Through the automatic adjustment of the fish individual field of vision and the step of state, the strawberry ambient light intelligent control management model can improve the algorithm global search ability and search accuracy, and achieve different environment temperature plants under light saturation value of accurate optimization. The experimental results show that the correlation between the calculated and measured values is very high, the maximum relative error is less than 6%, and the accuracy is higher, which can meet the needs of the photosynthetic rate control.
photosynthesis; fish swarm algorithm; strawberry; light environment; intelligent control
2016-04-15
江苏省十二五规划项目(D/2011/03/044)
赵 瑜(1982-),女,江苏泰州人,讲师,硕士,(E-mail)zhy08981025@sina.com。
S126
A
1003-188X(2017)07-0184-05
猜你喜欢
江苏农业科学(2020年12期)2020-07-20
西安科技大学学报(社会科学版)(2019年1期)2019-09-10
电子制作(2019年23期)2019-02-23
阅读与作文(小学高年级版)(2017年10期)2017-10-11
中外文摘(2017年19期)2017-10-10
中国篆刻·书画教育(2017年5期)2017-06-08
湖南大学学报·自然科学版(2014年3期)2014-12-30
新课程·中旬(2014年10期)2014-12-26
中学教学参考·理科版(2009年4期)2009-07-30
