
基于PLC的自动蔬菜穴盘钵机制钵和输送装置研究
2017-12-16 02:49王臻卓朱文琦
农机化研究 2017年4期
王臻卓,朱文琦,李 伟
(1.河南工业职业技术学院,河南 南阳 473000;2.国家电网山东栖霞市供电公司,山东 栖霞 265300)
基于PLC的自动蔬菜穴盘钵机制钵和输送装置研究
王臻卓1,朱文琦1,李 伟2
(1.河南工业职业技术学院,河南 南阳 473000;2.国家电网山东栖霞市供电公司,山东 栖霞 265300)
钵苗移栽技术是一项现代农业增产技术,在国内外得到了广泛应用。在钵苗移栽作业过程中,大部分采用的是人工作业的方式,这种作业方式作业效率低,并且对苗的损害较大。为了提高钵苗移栽的自动化程度,设计了一种新的基于 PLC 的蔬菜钵苗移栽机自动制钵和输送装置。该装置采用PLC控制系统,利用伺服电机和步进电机可以实现高精度秧苗的推出和准确定位,降低了秧苗的损失。利用带传动和齿轮传动实现了转筒和栽植器的同步。最后,在实验大棚对穴盘钵苗自动输送装置的效果进行了测试,为了验证试验机的效果,将人工实验结果和试验机测试结果进行了对比。结果表明:采用基于PLC控制系统蔬菜穴盘钵苗机的移栽作业和人工方式相比,蔬菜苗损失率有所下降,成功投苗率提升,从而验证了装置的可靠性。
穴盘育苗;制钵机;输送装置;PLC控制系统
0 引言
为了提升蔬菜钵苗的移栽技术,我国从国外引进和自行研制过各种形式的蔬菜移栽机,包括钳夹式、吊杯式及导苗管式。不同形式的移栽机各有特点,并且适应的作业环境也有所不同。为了提高移栽技术的自动化水平,我国从20世纪80年代开始研究自动化蔬菜苗移栽机,但在分钵和移栽投苗时大部分还是采用人工的作业方式,不仅费时费力,而且作业效率低,劳动强度大,秧苗的损失也较大。为了实现取苗、送苗和投苗的全自动化过程,需要利用控制系统对各个环节进行协调。目前,国内对于全自动的移栽机研究还不多,国外的全自动移栽机由于价格较高、结构复杂还没有实现全面的推广。基于PLC控制系统的自动穴盘钵苗移栽机不仅价格较低,而且结构简单,可以实现钵苗取苗、送苗及投苗全过程自动化,对于蔬菜钵苗移栽技术的研究具有重要的现实意义。
1 蔬菜穴盘钵苗自动控制系统结构和原理
在设计蔬菜穴盘钵苗自动控制系统结构时,首先要考虑穴盘钵的大小和工艺流程,穴盘钵的大小首先要满足基本的育苗要求,根据幼苗生长期所需要的营养,确定蔬菜穴盘钵的最小体积。根据设计经验,蔬菜穴盘钵的最小体积要大于20cm3,钵中的营养成分才能满足幼苗的基本生产需求。穴盘制钵机的工艺流程如图1所示。

图1 蔬菜穴盘制钵机的工艺流程
其主要工艺流程包括营养钵的拌料和填料、营养钵成型、播种、覆土和冲出。为了设计穴盘钵苗的自动输送装置,首先需要了解秧钵育苗的具体流程,如图2所示。首先是拌料和填料,在蔬菜秧钵里的土充分搅拌均匀,并将钵的入模口刮平;箱体内装有搅拌叉,搅拌叉可以做连续的回转运动,而制钵机依靠槽轮机构实行秧钵的旋转,其机械结构如图3所示。

图2 秧钵育苗步骤

图3 槽轮模盘机构
图3中,转盘上共有6个孔,功能分别为待填料、正式填料、秧钵成型、播种、覆土和冲出,转盘和模孔做间歇运动。冲头的运动形式为直线往复运动,其作用主要是在模孔内将土壤挤压成型并冲出钵体。成型冲头往往要比冲出冲头的行程长,其差值主要和钵体的尺寸和土壤的压缩比例有关。回转机构结构示意图如图4所示。

图4 回转机构结构示意图
在钵体的成型和冲出过程之间要有播种和覆土机构,可以参照蔬菜播种机的播种机构来设计;装置由同步带带动结构转动,将一定量的种子和土壤导入钵体,完成播种和覆土。回转机构通过下端回转体进行回转,利用上边的凹坑来取营养土或者种子,凹坑的大小由土壤和种子的尺寸来调节。
图5为蔬菜穴盘钵苗自动输送系统示意图。其中,电动机在带传动和齿轮传动的作用下减速,然后在锥齿轮的作用下利用拨销推动槽轮进行间歇转动,使模盘也随之转动;滑块在连杆的作用下做往复运动,带动冲头对穴盘进行冲压,从而实现蔬菜穴盘钵苗的自动控制。

1.电动机 2.拨销 3.槽轮 4.模盘 5.滑块 6.冲头
2 PLC控制系统
控制器是蔬菜穴盘钵苗自动输送机的核心部件,其设计要求既有较高的控制精度,又有可靠性和稳定性,以适应大面积的作业要求。为了解决这个问题,本研究采用PLC控制器,该种控制器物美价廉,并且装有触摸屏,可方便地进行现场各种穴盘钵苗参数的设定,同时对系统的硬件还进行了简化。
PLC控制系统的硬件设计主要考虑输入信号和输出信号:输入信号包括同步信号传感器和光识别传感器;输出信号包括步进电机的横纵向移动,从而可以使苗盘中的钵苗按需求取出。当遇到缺苗的情况时,PLC控制系统可以自动识别,并做出跳过或者报警提示。PLC和触摸屏通过显示器相连接,其硬件的设计框图如图6所示。
PLC和触摸屏利用串口进行了连接,通过液晶显示界面可实现控制的手动和自动操作切换,以及各种参数的设定,以使系统适应不同规格的钵苗盘。在手动操作时,可以对装置的每一个动作单独进行控制,从而可以作为辅助模式方便地对整个机器进行维护和调试。
图7为软件设计流程图。根据蔬菜穴盘钵苗自动输送装置的要求和工序步骤,编制了相关的控制软件,其编程控制的主要过程包括苗格入位、等待取苗、取苗完成、自动换位及自动换行。当全盘钵苗移动完成后,系统会自动发出提示,通过换新的钵苗盘,重新进行自动传输动作,完成输出钵苗的自动移动。
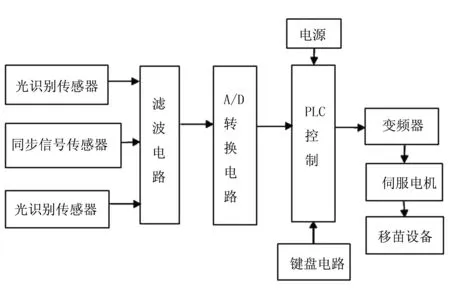
图6 硬件连接框图

图7 软件设计流程图
3 穴盘育苗制钵和输送装置实验
为了验证基于PLC控制系统的输出穴盘育苗输送装置的有效性和可靠性,对装置的作业效果进行了测试,在实验大棚内制造了穴盘苗钵,其结构如图8所示。

图8 穴盘育苗钵
该苗钵共分为6行和6列,分别将蔬菜种子在苗钵内进行培育,待种子发芽长成苗时,利用自动输送装置进行移栽。其中,成苗后的穴盘育苗钵如图9所示。

图9 穴培模式下的蔬菜苗
图9表示穴培模式下的蔬菜苗可以利用本次设计的PLC蔬菜穴盘钵苗自动输送装置对蔬菜苗进行自动移栽。为了验证装置的可靠性,采用手工移栽的方式和试验机进行对比。手工移栽测试结果如表1所示。

表1 人工蔬菜穴盘取苗移栽实验结果
由测试结果可以看出:采用人工穴盘钵苗移栽的蔬菜苗损失个数较大,其最大损失个数达到了68个,投苗成功的最大个数仅为1 139个。
表2为采用自动蔬菜穴盘移栽方式的测试实验结果。由测试结果可以看出:当采用和人工方式相同的穴盘总数和取苗次数时,采用自动穴盘钵苗移栽的蔬菜苗损失个数较少,最大损失个数仅为31个;而成功投苗的个数较多,最多的成功投苗个数达到了1 236个。这说明,采用基于PLC控制系统的蔬菜穴盘钵苗自动装置不仅可以有效地降低蔬菜苗的损失,而且可有效地提高投苗的成功率,从而验证了装置的可靠性。

表2 自动蔬菜穴盘取苗移栽实验结果
4 结语
设计了一种基于 PLC 的蔬菜钵苗移栽机自动制钵和输送装置,其利用PLC对伺服电机和步进电机进行控制,实现了秧苗的准确推出和定位,有效地降低了秧苗的损失程度,提高了蔬菜钵苗移栽机的自动化水平。为了验证装置的可靠性,采用实验样机测试的方法对钵苗移栽效果进行了测试,并将测试结果和人工作业方式进行了对比。结果表明:该装置可以有效地降低蔬菜苗的损失率,提高蔬菜钵苗投苗的成功率,从而验证了装置的可靠性。由于受时间和实验条件的限制,仅对单一的蔬菜品种进行了测试,在今后的研究中还需要结合具体的作业环境,对不同种类的蔬菜钵苗进行大量验证,使该种机型可以在蔬菜钵苗移栽技术中可以推广。
[1] 韩长杰,杨宛章,张学军,等.穴盘苗移栽机自动取喂系统的设计与试验[J].农业工程学报,2013,29(8): 51-61.
[2] 金鑫,李树君,杨学军,等.蔬菜穴盘苗取苗机构分析与参数优化[J].农业机械学报,2013,44(S1):1-6.
[3] 赵志国.稻板田油菜移栽机技术研究进展[J].安徽农业科学,2011,39(11):6364-6365.
[4] 张丽华,邱立春,田素博.穴盘苗自动移栽机的研究进展[J].农业科技与装备,2009(10):28-31.
[5] 符美军,全腊珍,熊耐新,等.棉花裸苗移栽机自动送苗机构的设计与仿真分析[J].湖南农业大学学报:自然科学版,2012,38(4):451-454.
[6] 顾文俊,曹卫彬,李卫敏,等.穴盘苗顶杆式取苗机构的自动化控制系统设计[J].农机化研究,2013,35(12): 108-111.
[7] 冯青春,王秀.穴盘钵苗智能移栽机关键技术研究现状[J].农机化研究,2013,35(11):250-252.
[8] 刘凯,辜松.基于机器视觉的嫁接用苗识别研究[J].农机化研究,2009,31(11):46-48.
[9] 田素博,邱立春,张诗.基于PLC的穴盘苗移栽机械手控制系统设计[J].沈阳农业大学学报,2007,38(1): 122-124.
[10] 陈进,吕世杰,李耀明.基于PLC的联合收获机作业流程故障诊断方法研究[J].农业机械学报,2011,42(11): 113-116.
[11] 陈运鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[12] 姬江涛,郑治华,杜蒙蒙.农业机器人的发展现状及趋势[J].农机化研究,2014,36(12):1-4.
[13] 乔永亮,何东键,赵川源,等.基于多光谱图像和SVM的玉米田间杂草识别[J].农机化研究,2013,35(8):30-34.
[14] 姬长英,周俊.农业机械导航技术发展分析[J].农业机械学报,2014,45(9):44-54.
[15] 孟庆宽,何洁,仇瑞承,等.基于机器视觉的自然环境下作物行识别与导航线提取[J].光学学报,2014, 34(7): 1-7.
[16] 刘金龙,郑泽锋,丁为民,等.对靶喷雾红外探测器的设计与探测距离测试[J].江苏农业科学,2013,41(7): 368-370.
[17] 高国琴,李明.基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7): 25-33.
[18] 方莉娜,杨必胜. 车载激光扫描数据的结构化道路自动提取方法[J]. 测绘报,2013,42(2):260-267.
[19] 熊爱武. 基于车载激光云点数据的道路模型重建[J].地理信息世界,2013,20(6):86-88.
[20] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68.
[21] 王海青,姬长英,顾宝兴,等.基于机器视觉和支持向量机的温室黄瓜识别[J].农业机械学报,2012, 43(3):163-167.
[22] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12):165-170.
[23] 李寒,王库,曹倩,等.基于机器视觉的番茄多目标提取与匹配[J].农业工程学报,2012,28(5):168-172.
[24] 项荣,应义斌,蒋焕煜.田间环境下果蔬采摘快速识别与定位方法研究进展[J].农业机械学报,2013,44(11): 208-223.
[25] 付丽霞,李云乐.农业面源污染的现状、问题及对策探析[J].食品安全质量检测学报,2014,5(7):2285- 2289.
[26] 栾江,仇焕广,井月,等.我国化肥施用量持续增长的原因分解及趋势预测[J].自然资源学报,2013,28 (11):1869-1878.
[27] 沈德军.农作物叶面施肥的意义、机理及技术要点[J].安徽农学通报,2012,18(12):111-112.
[28] 鱼彩彦.叶面施肥技术在农业生产中的应用[J].农业与技术,2013,33(12):30.
[29] 裴文超,陈树人,尹东富.基于DSP和单片机的实时对靶喷施除草系统[J].农机化研究,2012,34(1):149-153.
Research on the Making and Transporting Device of Automatic Vegetable Pot Machine Based on PLC
Wang Zhenzhuo1, Zhu Wenqi1, Li Wei2
(1.Henan Polytechnic Institute,Nanyang 473000,China;2.Qixia Power Supply Company of National Power Grid, Qixia 265300, China)
The seedling transplanting technology is a modern agricultural production technology, has been widely used at home and abroad. In the process of transplanting seedling transplanting, most of the methods used are manual work, which has low efficiency and great damage to the seedlings. In order to improve the automation degree of the pot seedling transplanting, a new type of automatic bowl and conveying device for the vegetable bowl seedling transplanting machine based on PLC was designed. The device adopts the PLC control system, the servo motor and step into motor can realize high precision seedling launched and accurate positioning, reducing the loss of rice seedlings. Using the belt drive and gear transmission to realize the synchronization of the drum and the planting device. Finally in an experimental greenhouse seedlings automatic conveying device were tested, in order to validate the experimental machine effect, the artificial experimental results and testing machine test results were compared, by the test results show that the based on PLC control system vegetable plug seedling machine transplanting operation and manual methods compared, vegetable seedling loss rate declined, dropping seedling rate increase, which verified the reliability of the device.
plug seedling; making machine; feeding device; PLC control system
2016-01-18
河南省科技攻关项目(152102110049)
王臻卓(1985-),女,河南南阳人,讲师,硕士。
李 伟(1983-),女,山东烟台人,讲师,硕士,(E-mail)hwfcgh2015@sina.com。
S223.94;TP273
A
1003-188X(2017)04-0229-05
猜你喜欢
当代水产(2021年4期)2021-07-20
林业科技(2020年3期)2021-01-21
四川蚕业(2020年3期)2020-07-16
当代水产(2020年4期)2020-06-16
当代水产(2020年4期)2020-06-16
当代水产(2019年9期)2019-10-08
农机化研究(2019年7期)2019-05-24
农业工程学报(2018年21期)2018-11-05
农机化研究(2018年6期)2018-06-06
农业工程学报(2018年9期)2018-06-01
