
基于TRIZ的旋转分离式宝塔菜联合收获机设计
2017-12-16 02:52李金川郑毅敏胡榄庆
农机化研究 2017年4期
李金川,郑毅敏,胡榄庆,尚 欣,慕 松
(宁夏大学 a.机械工程学院;b.大学生就业创业指导服务中心,银川 750021)
基于TRIZ的旋转分离式宝塔菜联合收获机设计
李金川a,郑毅敏b,胡榄庆a,尚 欣a,慕 松a
(宁夏大学 a.机械工程学院;b.大学生就业创业指导服务中心,银川 750021)
针对其他根茎类作物收获机满足不了宝塔菜收获要求的问题,应用TRIZ理论提出解决方案,设计了一种高效率、多功能,并不易损伤果实表皮的旋转分离式宝塔菜联合收获机。同时,简述了该机的整体结构配置、工作过程、传动系统以及关键零部件的设计等。依据TRIZ理论分析,分离装置设置为四级筛选组合机构,包括两级运输分离机构、滚筒旋转分离机构及振动筛分离机构,大大提高了果实清洁率。经田间初步试验,验证了该机的可使用性,且收获效果良好。
宝塔菜;联合收获机;旋转分离;TRIZ
0 引言
宝塔菜原名草石蚕,地下根茎类作物,外观呈现螺旋状塔形,肉质脆嫩,表皮易磨损,春种秋收,可连续数年收获。宝塔菜易与土壤粘连,在收获过程中容易损伤果实表皮。其种植行距为25~30cm,株距为10~16cm,收货时挖掘深度为15~20cm。
目前,国内外对宝塔菜收获机的研究很少,市场上暂无投入生产的收获机械,完全依靠人工完成收获作业,不能满足当前市场对宝塔菜的大量需求,严重制约了宝塔菜产业链的发展。
基于上述宝塔菜的特性及种植工艺,其他根茎类作物(如马铃薯、花生等)收获机并不能满足其收获要求。随着市场对宝塔菜需求的不断增加及宝塔菜的市场化、产业化、品牌化,实现宝塔菜的机械化收获已经成为必然趋势。
作为取代人工收获的机械,需要完成对收获过程从破土、运送、分离到果实收集的一体化[1],从而达到取代低效率人工收获的目标。除此之外,其还应具备以下特点[2-3]:
1)果实的残品率不高于5%;
2)果实的清洁度不低于95%;
3)遗漏损失率不高于5%;
4)整机田间作业时应适用于当地种植模式,不对农田表观造成大面积损毁;
5)机械入土挖掘时,不应造成果实的损伤。
根据以上要求,设计了一种能一次性完成破土、挖掘、输送、分离和收集等工作于一体,并不易损伤果实表皮的宝塔菜联合收获机。
1 TRIZ理论应用
宝塔菜具有皮质脆嫩、容易磨损、易与泥土粘连等特性,其他根茎类作物收获机满足不了宝塔菜收获要求。针对上述问题,本文基于TRIZ理论进行了创新性方案设计,提出了一种具有“旋转分离”装置的“四级筛选”收获机。
1.1 提出问题
问题1:宝塔菜表皮易磨损,普通根茎类作物收获机会对其造成伤害,使残品率升高。
问题2:宝塔菜果实体积较小,现有收获机的筛选效率不高,果实清洁度不高。
1.2 定义技术矛盾
问题模型1中,需要改善收获机对果实的磨损程度,对机器的制造精度提高了要求,增加了制造成本。
问题模型2中,需要提高收获机的效率,即果实的清洁率,这可能要增加分离筛选装置,分离的装置的增加和布置使装置的复杂性提高。技术矛盾如表1所示。
1.3 矛盾矩阵的建立及创新原理的应用
查矛盾矩阵表得:问题模型1的技术矛盾所对应的发明原理为不对称原则、向另一维度过渡原则、部分剔除和再生原则及复制原则;问题模型2的技术矛盾所对应的发明原理为等势原则、向另一维度过渡原则、代替力学原理原则及“中介”原则。具体解决方案如表2所示。

表1 技术矛盾表

表2 矛盾矩阵表
综合分析各原理解,采用塑料材质运输机构,并增加旋转提升分离装置。目的如下:一是减小机器与物料之间的相对移动,降低因摩擦对果实表皮的损伤;二是较现有根茎类作物收获机增加了一级分离装置,达到了四级筛选效果,提高了果实的清洁率。
2 整机结构与工作原理
根据TRIZ理论分析,该机采用四级筛选方式,增加滚筒分离装置,既节省了布置空间,又增大了分离强度,提高了生产率。
为了适应当地生产需要,方便动力传递,将收获机设计为牵引式,将其置于农用拖拉机的后端,采用传动轴连接;拖拉机的动力输出轴为收获机的动力输入,液压调节装置可对挖掘深度和机具高度进行调整,保证机具的挖掘要求。
宝塔菜联合收获机由破土旋耕刀、组合二阶平面铲、一级链杆式输送装置、二级链杆式输送装置、三级滚筒提升分离装置、四级振动筛分离装置及块茎收集装置组成,结构配置如图1所示。
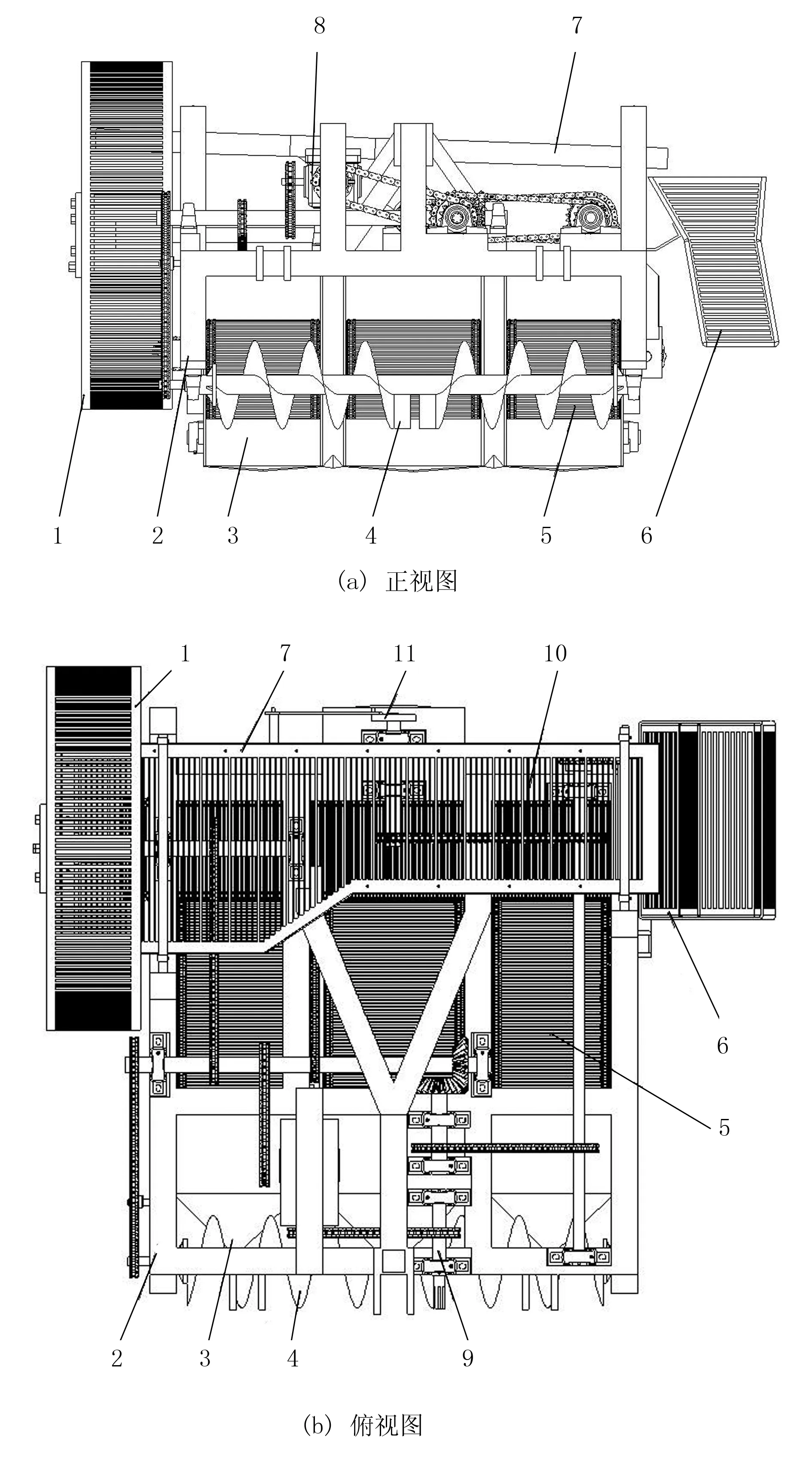
1.旋转提升轮 2.机架 3.二阶平面铲 4.破土旋耕刀 5.一级输送链 6.集果箱 7.振动筛选器 8.减速器 9.动力输入轴 10.二级横向输送链 11.连杆机构
该机具有如下优点:能一次性完成破土、挖掘、输送、分离、筛选和收集等工作;分离筛选装置不易对果实表皮造成损伤,这是其他普通收获机械所达不到的;传动装置采用链传动,能保证准确的平均传动比,传动效率高,能在低速重载、高温条件及露天等不良环境中工作;破土旋耕刀为双向旋向,可将土壤充分分散到一级输送装置上,减少了收获机两侧的积土量,可达到对果实的充分收获。该机的一级链杆式输送装置行程较短,不会因行程过长而造成壅土现象;采用的链杆机构既能完成对宝塔菜果实的输送,又能达到茎土分离的作用;装备有两级运输分离装置、一个滚筒提升装置和一个振动筛选装置,可达到四级筛选的效果,大大提高了果实清洁率。
收获机工作过程:机器由拖拉机牵引运行,破土旋耕刀使地表板结土壤破损,并进行松土、碎土;随后组合二阶平面铲将宝塔菜果实挖出并将其送入一级链杆式输送装置:经第一次筛选后,果实随一级分离机构进入横向运输的二级链杆式输送装置;最后,快速进入三级滚动筛,滚动筛可将果实提升至振动筛选器,宝塔菜果实经振动筛选后进入集果箱。
3 主要机构及关键部件设计
3.1 传动系统设计
该机采用分路动力传输系统,首先由动力输入轴(轴1)通过减速箱将动力传递给轴3。之后,动力分为3路路传递:一路通过锥齿轮转换方向后传递给轴2,并带动二级输送装置和振动筛运动;另一路传递给轴5带动一级输送装置运动;最后一路带动滚动筛旋转。传动系统示意图如图2所示。

图2 宝塔菜联合收获机传动系统
该机传动系统的各零件参数是根据拖拉机动力输出轴转速和行走速度而设计的。本文根据约翰,迪尔404拖拉机设计,拖拉机以I挡速度(1.88km/h)运行,动力输出轴转速n=540r/min。一级、二级输送装置为升运链装置,类似于链板式输送机,根据链板输送机的输送能力可求得两级输送装置链条的平均速度[4]:第一级链条输送速度1.04m/s,第二级链条输送速度1.77m/s。由此确定各链轮转速,第三级滚动筛的转速为90r/min,振动筛振动频率为194次/min。
3.2 破土旋耕刀
根据宁夏大学陈虎[2-3]的实验结果,宝塔菜收获机在收获后会造成收获路径旁的积土量过多,一些宝塔菜果实也会存留在积土里,使果实遗漏损失率升高;加之宁夏收获季节土壤表层干燥、板结严重,所以设置破土旋耕刀,并将其设计为双向螺旋,在松土的同时,将土壤、遗漏果实及其他杂物通过旋耕刀螺旋推移的作用,进入第一级链杆式输送装置,既达到了破土的效果,又减少了积土量,从而降低了果实遗漏率。该装置左右螺旋片的高度均为420mm,螺距均为130mm ,为对称布置,其外形如图3所示。

图3 破土旋耕刀
3.3 二阶平面铲
在宝塔菜的挖掘收获过程中,出土量较多,综合考虑入土性能、碎土能力及制造成本等方面因素,选用二阶平面铲来改善宝塔菜收获机的碎土性能[5-6]。本设计的二阶平面铲具有两个不同的倾角,可使土壤破碎程度加大,在很大程度上提高了碎土能力,减小了机具的动力消耗;在制造成本方面,加工制造也相对容易,适用于收获宝塔菜这类表皮较薄的作物。
通过引入土壤破裂模型和挖掘铲力学模型[7-8],对挖掘铲铲面倾角进行多目标优化[9],运用Mathematica软件优化得到了一阶铲面倾角20.44°,二阶铲面倾角43.64°,一阶铲面高度0.12m,虚拟铲面倾角30.53°。二级平面铲截面参数如图4所示。

图4 二阶平面铲截面参数
考虑一级输送装置采用链杆输送机构,杆长不能太长,为实现铲与输送装置的良好对接,将铲件设计为组合铲。组合铲由3个二阶平面铲构成,它们均固定在机架上。组合铲可分担土壤对单铲的法向载荷、土壤对铲面的摩擦力等,降低了对机架的刚度要求。二阶平面铲的结构布置图如图5所示,从左至右,二阶平面铲的宽度依次为270、320、270mm。

图5 二阶平面铲结构布置图
针对宝塔菜易受损伤、体积小等特点进行优化设计得到的二阶平面铲,理论上提高了挖掘铲的碎土能力,降低了果实破损率,也为小型根茎类作物收获机挖掘装置的设计与改良提供了方向。
3.4 链杆式输送装置
链杆式输送装置分为一级输送装置和二级横向输送装置,二者均采用链杆结构(即传统马铃薯收获机中所说的升运链装置)。链杆由输送链条和圆柱形长杆构成,如图6所示。该装置采用链传动是考虑到链传动具有无弹性滑动和打滑现象及过载能力强等优点,既可作为输送器,又可筛选果实。由于宝塔菜果实呈螺旋塔形,横截面直径为8mm左右,为使果实在输送过程中不会掉落,故将链条节距、链杆直径均设为8mm。一级输送装置中的链杆长度依次为264、314、264mm(从左至右),其输送行程均为450mm;二级输送装置中的链杆长度为230mm,输送行程为1 150mm。

1. 一级链杆输送装置 2.二级链杆横向输送装置
3.5 滚筒提升分离装置
该装置具有两个作用:一是将果实提升至顶部的振动筛中;二是筛选果实,相当于第三级分离筛选装置。滚筒提升分离装置结构如图7所示。滚筒直径1 000mm,厚度250mm,其内部装有25块均匀分布的并与水平面成30°的塑料板,用于果实的提升。为减少对果实表皮的损伤,滚筒由尼龙制成,滚筒四周为均匀的网孔,用于分离碎土。

图7 滚筒提升分离装置配置图
3.6 振动筛
该装置的作用是进一步对果实进行筛选,提高果实清洁度,相当于第四级分离筛选装置。为了有效地从挖掘物中分离出宝塔菜果实,并减轻对宝塔菜表皮的损伤,该装置采用塑料圆柱条形筛,利用连杆机构驱动振动筛左右摆动。振动筛越长,分离效果越佳,所以本设计将振动筛贯穿整机,已达到良好的分离效果。振动筛长度设计为1 350mm,为使果实顺利进入集果箱,将振动筛设计为倾斜状态,倾斜角度为15°,其结构布置图如图8所示。

1.集果箱 2.小连杆 3.振动筛 4.大连杆 5.偏心圆盘
4 初步试验
该机委托宁夏银川凯盛机械制造有限公司制造,并于2015年11月在宁夏银川市贺兰县宝塔菜种植基地进行初步试验考核。该产区的宝塔菜种植方式为平种,行距为25cm,株距为10cm,作业时一次收获4行。
试验结果显示:果实遗漏情况不明显,不存在果实磨损情况;但由于宁夏地区土地较为干旱,板结严重,造成碎土颗粒过硬,从而导致了部分碎土颗粒分离不完全的现象。本次试验旨在测定该联合收获机的可使用性,为后续的设计工作提供理论与实践依据。田间试验如图9所示。

图9 田间初步试验
5 结论
1)应用TRIZ理论找出来解决关键问题的方法,设计制造了一种能一次性完成破土、挖掘、输送、分离和收集等工作,并不易损伤果实表皮的旋转分离式宝塔菜联合收获机,实现了宝塔菜的机械化收获。
2)试验结果表明:该机收获效果良好,不易对果实表皮造成损伤,果实遗漏现象不明显,且果实清洁度较高,为后续的设计制造及试验研究奠定了基础。
[1] 胡志超, 彭宝良,尹文庆,等.多功能根茎类作物联合收获
机设计与实验[J].农业机械学报, 2008, 39(8):58-61.
[2] 陈虎,王春秀,赵国成.草石蚕联合收获机的研究[J]. 中国农机化学报, 2014, 35(5):45-47.
[3] 陈虎.侧悬挂式宝塔菜联合收获机的设计[D].银川:宁夏大学, 2014.
[4] 毛广卿. 粮食输送机械与应用[M].北京:科学出版社, 2003:69-114.
[5] 杨然兵,李国莹,尚书旗,等.机械化挖掘收获部件发展现状与展望[J]. 农机化研究, 2008(9):5-9.
[6] Yang Ranbing, Shang Shuqi. Design and test of multifunctional curved-surface shovel in digging harvest[J].Transactions of the Chinese Society of Agricultural Engineering, 2012(S2):47-52.
[7] 吉尔 WR, 范德伯奇 GE.耕作和牵引土壤动力学[M].耕作和牵引土壤动力学翻译组, 译. 北京:中国农业机械出版社, 1983:16-60.
[8] 邓伟刚, 孙宏, 王春光.马铃薯挖掘铲工作阻力计算与分析[J]. 农机化研究, 2014,36(10):71-74.
[9] 孙靖民, 梁迎春.机械优化设计[M].北京:机械工业出版社, 2006:187-202.
[10] 沈萌红.TRIZ理论及机械创新实践[M]. 北京:机械工业出版社, 2012.
Design of Rotary Type Artichoke Combine Harvester Based on TRIZ
Li Jinchuana,Zheng Yiminb,Hu Lanqinga, Shang Xina,Mu Songa
(a.School of Mechanical Engineering; b.Career Guidance Students' Employment Service Center,Ningxia University,Yinchuan 750021,China)
Aimed at the existing problem that other root-tuber harvester can’t meet the harvest requirements of artichoke, this article puts forward some solutions based on TRIZ, and designs a rotary type artichoke combine harvester which has high efficiency, multifunction, and no damage on fruit epidermis. This paper describes the overall structural configuration, operating process, transmission system, and the design of key components. With the theoretical analysis based on TRIZ, this design sets up four filter combination mechanism which includes two separate conveyors, a picking roller, and a shaker. This design improves the fruit-cleaning rate. The initial field-test verified the usability of the machine and achieved good results.
artichoke; combine harvester; picking roller; TRIZ
2016-03-28
宁夏回族自治区科技支撑计划项目(413-0224)
李金川(1992-),男,山东夏津人,硕士研究生,(E-mail)ljcnxu@163.com。
郑毅敏(1964-),男,银川人,教授,硕士研究生,(E-mail)XJKZym@nXu.edu.cn。
S225.92
A
1003-188X(2017)04-0149-05
猜你喜欢
橡塑技术与装备(2022年3期)2022-03-17
机械研究与应用(2022年1期)2022-03-14
中国农村科技(2021年12期)2021-12-28
中等数学(2021年9期)2021-11-22
世界有色金属(2020年13期)2020-12-08
科学技术创新(2020年17期)2020-06-30
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
河北农机(2020年2期)2020-01-08
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
