
基于区域生长重心的大型多阵列圆标定板基准点的提取技术
2017-12-15 00:53,,,
计算机测量与控制 2017年11期
,,,
(1.上海工程技术大学 城市轨道交通学院,上海 201620; 2.上海欣铁机电科技有限公司,上海 201100)
基于区域生长重心的大型多阵列圆标定板基准点的提取技术
余佳磊1,何越磊1,龚佩毅2,汤友福2
(1.上海工程技术大学城市轨道交通学院,上海201620; 2.上海欣铁机电科技有限公司,上海201100)
针对视觉测量在轨道交通隧道大范围轮廓测量上的问题,研究设计一种大型多阵列圆标定板进行系统标定工作,提出区域生长重心法实现对标定图像上基准点的提取;即将区域生长法和灰度重心法相结合,通过粗定位寻找每个基准圆的种子点,考虑种子点像素的4邻域像素进行区域生长,然后利用灰度重心法提取生长区域的重心作为基准点;将非线性变化的基准点替代线性提取的基准圆的种子点,消除了图像畸变的影响,保证了特征检测过程的可靠性和鲁棒性,达到对于多阵列圆大型标定板基准点的提取;通过搭载鱼眼镜头拍摄6 m的模拟隧道横断面轮廓,进行轮廓测量与还原;实验表明该方法提取的基准点像素坐标误差可达到2pixel以内,系统测量精度能够达到±5 mm以内,完全满足轨道交通隧道横断面轮廓测量误差标准。
视觉测量;大型标定板;多阵列圆;区域生长重心法;基准点
0 引言
机器视觉测量以其非接触、范围广、高精度的优势逐渐被广泛的应用,在其测量领域中常需要对目标距离、几何关系或是大范围目标轮廓尺寸等进行测量。尤其是在轨道交通运行安全检测中对站台几何关系的测量、对隧道横断面轮廓尺寸检测等中,往往都需要进行近景大范围摄影测量,而在进行测量之前都需要对摄像机进行标定工作,标定的精度对最终测量的精度具有很大影响。在高精度的视觉任务中,一般都采用具有已知坐标规则控制点的标定板进行摄像机标定工作[1]。
常用的平面标定板有棋盘格式[2]、黑白格式[3]、圆点阵列式[4],这些标定板上都有规律的分布着一些具有一定特性的特征点。圆点阵列式标定板在摄影变换下保持椭圆形状不变的特性被广泛使用,通过提取基准圆的圆心在世界坐标系中的坐标值,便可得像素坐标和世界坐标之间的对应关系,完成摄像机的标定工作。目前对于圆点阵列标定板圆心特征点的提取方法有很多,大多采用椭圆参数拟合[5-6]的方法实现对椭圆图像中心的提取,文献[7]中对7×7圆点阵列标定板图像进行自适应阈值分割中,采用椭圆参数拟合的方法,计算标定板各圆点中心的图像坐标;文献[8]中利用椭圆检测和参数拟合的方法,对用鱼眼镜头所拍摄的标定板上48个特征圆进行特征提取和排序;文献[9]中通过算法搜索标定板上不共线的3个椭圆边界信息,寻找椭圆的公切线进行中心点的提取;Luis A[10]等人通过建立Delauny三角网,计算出图像坐标与世界坐标之间的单应性矩阵,来对特征点进行排序。这些椭圆中心检测方法都是针对于阵列圆较少、外界环境影响较小的标定板,但是对于大型标定板其阵列圆较多、标定范围很大、光照不均匀再加上镜头畸变的影响下,使得标定图像灰度图的灰度范围很广,直接进行边缘识别提取椭圆中心的难度很大。
研究针对轨道交通隧道横断面轮廓测量问题,利用鱼眼镜头拍摄标定板图像进行基准点提取,并进行轮廓还原实验验证基准点提取的精度。因此本文结合近景大范围测量特点,提出了区域生长重心法,该方法是将区域生长法和灰度重心法相结合,通过粗定位寻找每个基准圆的种子点进行区域生长,然后利用灰度重心法提取生长区域的重心作为基准点,达到对于大型多阵列圆标定板上基准点的提取。
1 标定板设计
大尺寸的标定板可适用于使用广角或鱼眼镜头进行近景大范围的视觉测量,能够保证全视野成像。对于近景大范围摄影测量来说,既需要保证标定板在所测量区域内,又需要减小镜头畸变所带来的影响,保证每个基准圆的特征稳定性。因此,对于此平面标定板设计需要遵循以下原则:
1)标定板应保证有足够大的尺寸范围,保证在适当的距离成像时,能够覆盖整个测量区域;
2)标定板上基准圆与背景灰度值之间应能够区分明显,便于特征提取;
3)基准圆的尺寸及基准圆之间的圆心距应大小相等、分布均匀,保证标定过程中的特征稳定性和对应性。
研究设计了如图1所示的结构实现多阵列圆的大型标定板,达到大范围轮廓的尺寸测量。标定板整体尺寸为2 400x2 400 mm,平板上有规律的分布着3 600个直径为20 mm的基准圆,两个基准圆之间的圆心距为40 mm,加工精度达到0.02 mm以上,基准圆采用喷黑处理,使其与背景之间能够存在明显的灰度差,降低周围环境和光照等因素对图像质量的影响。利用鱼眼镜头所拍摄的标定板图像如图2所示,可以看出标定板图像受光照和镜头畸变影响很大。
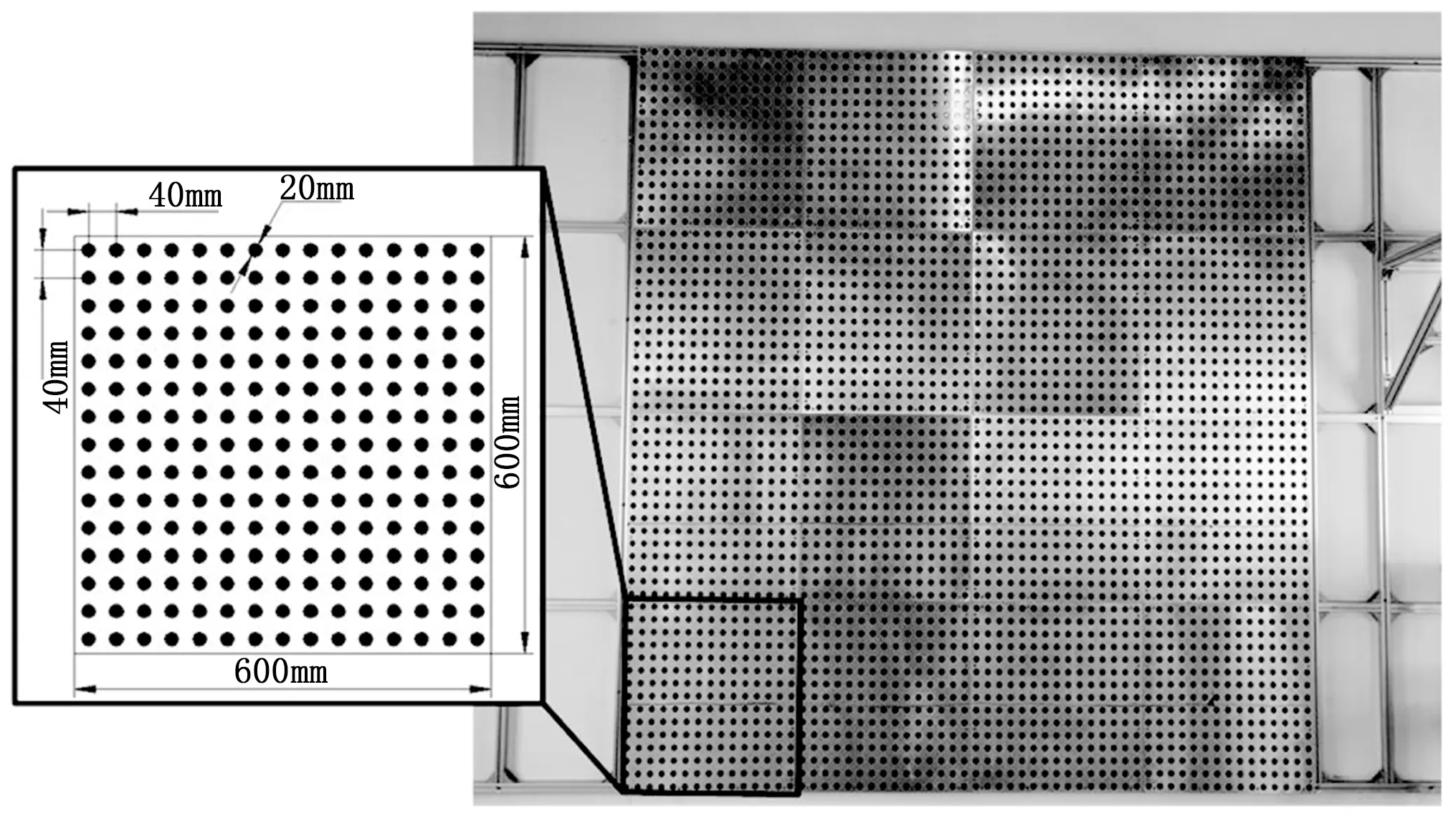
图1 标定板结构图

图2 鱼眼镜头下标定板实际成像
2 区域生长重心法提取基准点
对于用二维标定板进行摄像机标定时最重要的一步就是基准点的提取,提取的精确性直接影响系统的标定精度。在一张受畸变和外界环境影响较大的大型多阵列圆标定板图片上如何运用图像处理算法实现基准点的准确提取,是需要解决的一个重要问题,因此本文根据区域生长和灰度重心两种算法各自的优势,提出将两种算法相结合进行基准点的提取,其方法流程如图3所示。首先对于一幅大范围的标定板图像需要对其进行增强处理,消除噪声,然后运用区域生长重心法对初始选取的种子点进行基准点的提取,同时记录基准点的精定位坐标,并搜索下一个基准圆的种子点粗定位坐标,重复上面操作遍历3 600个基准圆,完成基准点的提取生成标定网格。

图3 基准点提取方法流程
2.1 初始基准点的提取
区域生长法[11]是根据预先定义的生长准则,根据像素的相似性和连通性,把与种子点灰度值相似的相邻像素附加到生长区域的每个种子点上,当满足一定条件时生长终止,区域被标记。灰度重心法[12-13]则应用物理学知识把像素的灰度值看作像素质量,即将区域内每一像素位置处的灰度值当做该点的“质量”来求区域中心。
区域生长法最重要的是生长准则的确定,生长准则需要根据具体生长对象而定。本文针对大型多阵列圆标定板所用的区域生长法的步骤如下:
1)确定标定板的二维坐标系进行初始种子点的选取及基准圆种子点的粗定位。
2)确定生长准则:定义一个全局阈值T(根据基准圆与背景在灰度值上处于最不利位置确定),考虑种子点像素的4邻域像素,若待加入像素的灰度值和已经分割区域所有像素点的平均灰度值差的绝对值小于或等于该阈值,则认为该像素类似于种子点像素,合并到种子点像素所在的区域中,同时将这些像素当作新的像素点继续循环上面过程。
3)终止准则:邻域像素的灰度值和已经分割区域所有像素点的平均灰度值的差的绝对值大于该阈值,则像素点拒绝进入生长区域,生长结束,完成区域分割。
种子点即是对基准点的粗定位,种子点的选取是区域生长法的关键。本文所提出的方法需要人工选取3个不共线的种子点,所选取的种子点必须在黑色的基准圆内,并且灰度值为零。种子点选取如图4所示,以标定板左下角为原点建立直角坐标系,选取标定板左下角3个不共线种子点分别为a00、a01、a10,且灰度值f(a00)=f(a01)=f(a10)=0。然后根据每个种子点的像素坐标及灰度值分别进行区域生长。
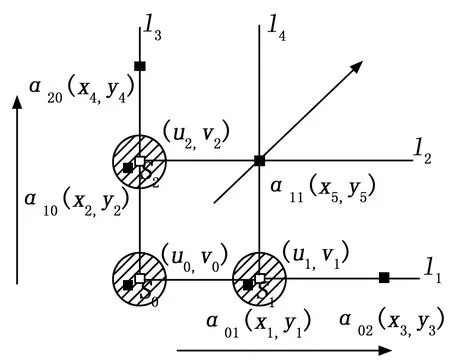
图4 初始种子点示意图
若n为基准圆区域内所有满足生长准则的像素点个数,f(x,y)为基准圆区域内某一种子点邻域像素的灰度值,当:
(1)
则像素点拒绝进入生长区域,完成区域分割,最终得到人工选取的3个种子点的生长区域点集S0、S1、S2。阈值T的设定受图像质量和光照强度等因素影响很大,阈值设置的好坏将直接影响种子点区域生长的结果,本文通过对标定图像进行分析,根据基准圆与背景在灰度值上处于最不利位置确定。然后对所得到的区域进行利用灰度重心法进行重心提取,将区域内每一像素位置处的灰度值当做该点的“质量”,则区域生长法所求出的区域其中心坐标公式如下:

(2)

(3)
(u,v)为区域中心坐标,Ω为目标区域集合,f(u,v)是坐标为(u,v)的像素点的灰度值。以区域S0为例,S0内像素数为n,(x0i,y0i)为S0内第i个像素坐标,f(x0i,y0i)为其第i个像素灰度值,若目标区域的灰度重心坐标为(u0,v0),则:
(4)
(5)
进一步则可提取出S1、S2区域内的重心坐标(u1,v1)、(u2,v2),则就得到了3个目标基准点(u0,v0)、(u1,v1)、(u2,v2),并以此3个基准点为目标进行3个方向上基准圆种子点的粗定位。
2.2 种子点粗定位
标定板上所有种子点的坐标都需要以初始的3个基准点为基准,进行搜索确定。本文所设计标定板保证基准圆的圆心距大小相等、分布均匀,使在标定过程中基准圆之间具有很好的特征稳定性。所以本文使用区域生长重心法进行基准点的提取时需要假设相邻3个基准圆之间具有一般线性特性,通过两段之间的斜率和距离相等,进行种子点的粗定位。如图4所示,S0、S1、S2区域中3个基准点分别为(u0,v0)、(u1,v1)、(u2,v2),则:
(6)
(7)
根据直线的一般线性特性,则a02种子点的像素坐标(x3,y3)联立以下公式求得:
y3=kl1(x3-u0)+v0
(8)
(x3-u1)2+(y3-v1)2=(u1-u0)2+(v1-v0)2
(9)
同理即可得到a02、a11两个种子点像素坐标,同时并进行基准点提取。因为镜头的畸变是非线性变化的,而种子点的粗定位是线性求取的,利用基准点坐标替代粗定位的种子点坐标,将基准点转化为非线性变化,消除畸变影响,这样每个种子点很好的遗传了上两个基准点的特性。遍历3 600个基准圆,最终得出3 600个基准点像素坐标。对图2鱼眼镜头下标定板实际成像进行基准点的提取,由于标定图像图幅较大分别截取了标定图像上畸变较大的4个边角处基准点的提取结果,并用白色像素点来表示每个基准圆的基准点,提取结果如图5所示,基准点像素坐标误差可达到2 pixel以内。同时对所标示出的基准点进行连线最终得出标定图像的标定网格,如图6所示。根据标定板的实际二维坐标,则就实现了标定网格的交点与真实值的映射关系。
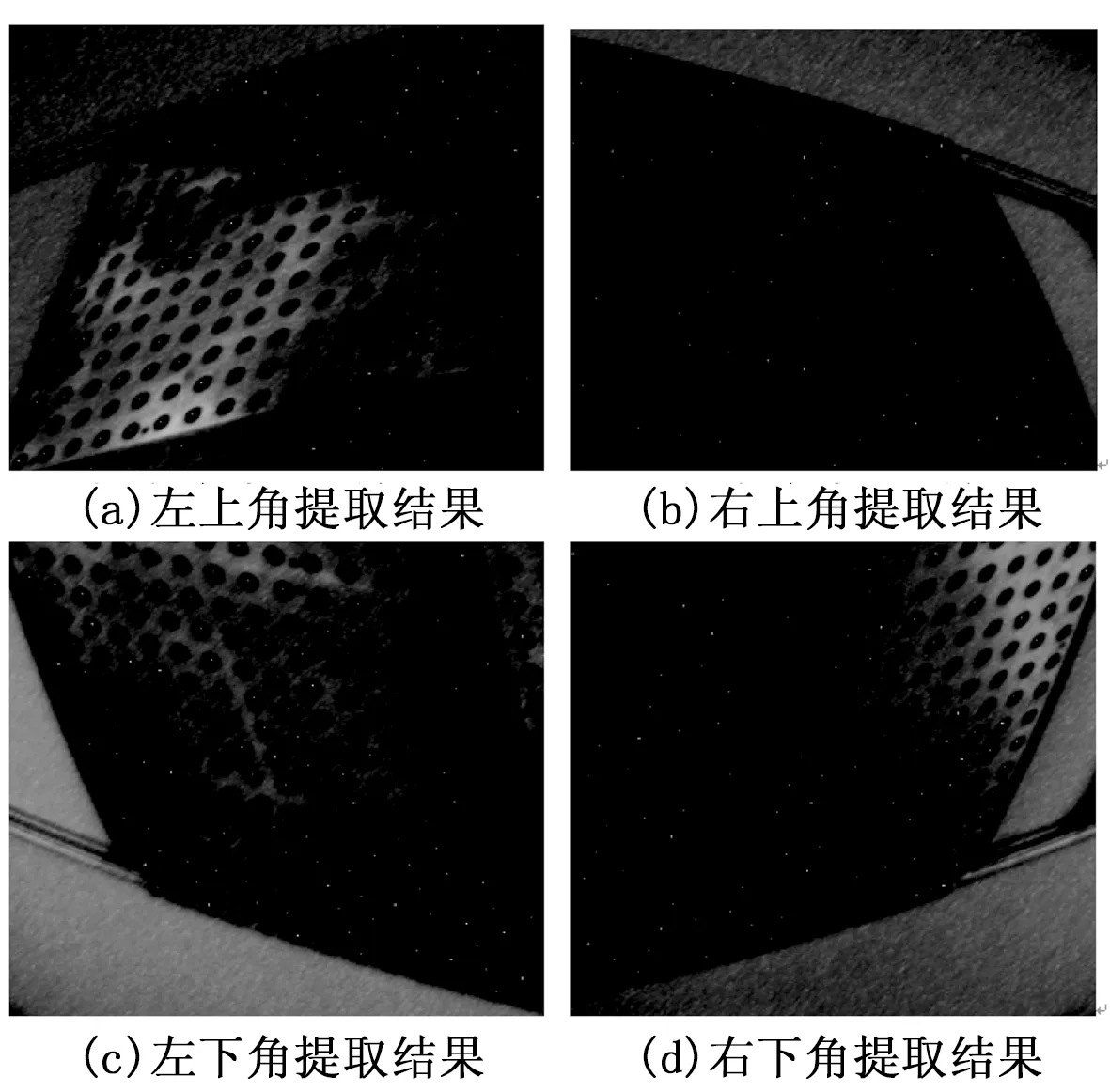
图5 标定板基准点提取结果示意图
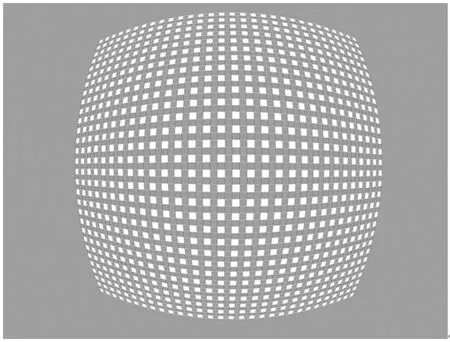
图6 标定网格图
利用区域生长和灰度重心两种算法结合的区域生长重心法,对大型多阵列圆标定板基准点的提取,不仅可以充分提取有用像素信息找到每个基准圆所对应的基准点坐标,而且利用非线性变化的基准点替代线性变化的种子点,消除了图像畸变的影响,保证了特征检测过程的可靠性和鲁棒性。通过设置全局阈值不仅简化了区域生长算法,而且不失自适应性,很好的减弱了光照的不均匀对标定板的干扰。
3 实验验证
为满足直径6米隧道横断面轮廓测量的要求,本实验利用实验室场房进行等尺度模拟。通过工业相机搭载焦距12 mm最大光圈F2.8的鱼眼镜头,滤光片的波长为635 nm,在不改变相机焦距等参数下,调整镜头光圈,按照一定的距离成像拍摄激光器组打出的激光断面轮廓如图7所示,图像分辨率高达4 096 × 3 072。采用区域生长重心法,提取标定图像中基准点,将图像中基准点对应标定板上每个基准圆的实际二维坐标,赋予每个基准点的实际坐标值,完成相机标定工作,然后进行断面轮廓的还原。
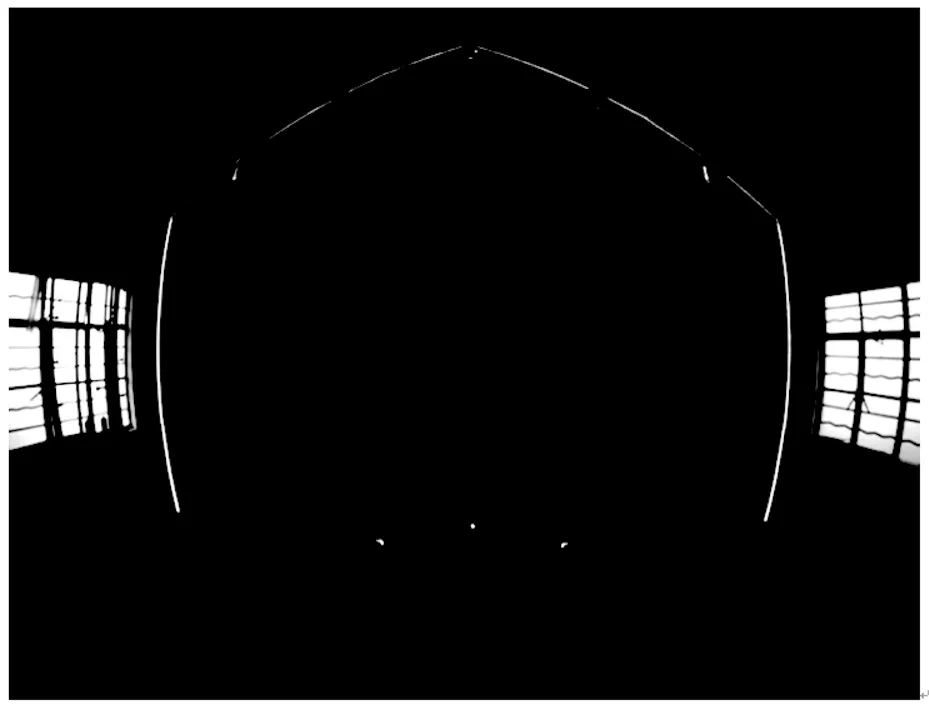
图7 拍摄的激光线断面轮廓图
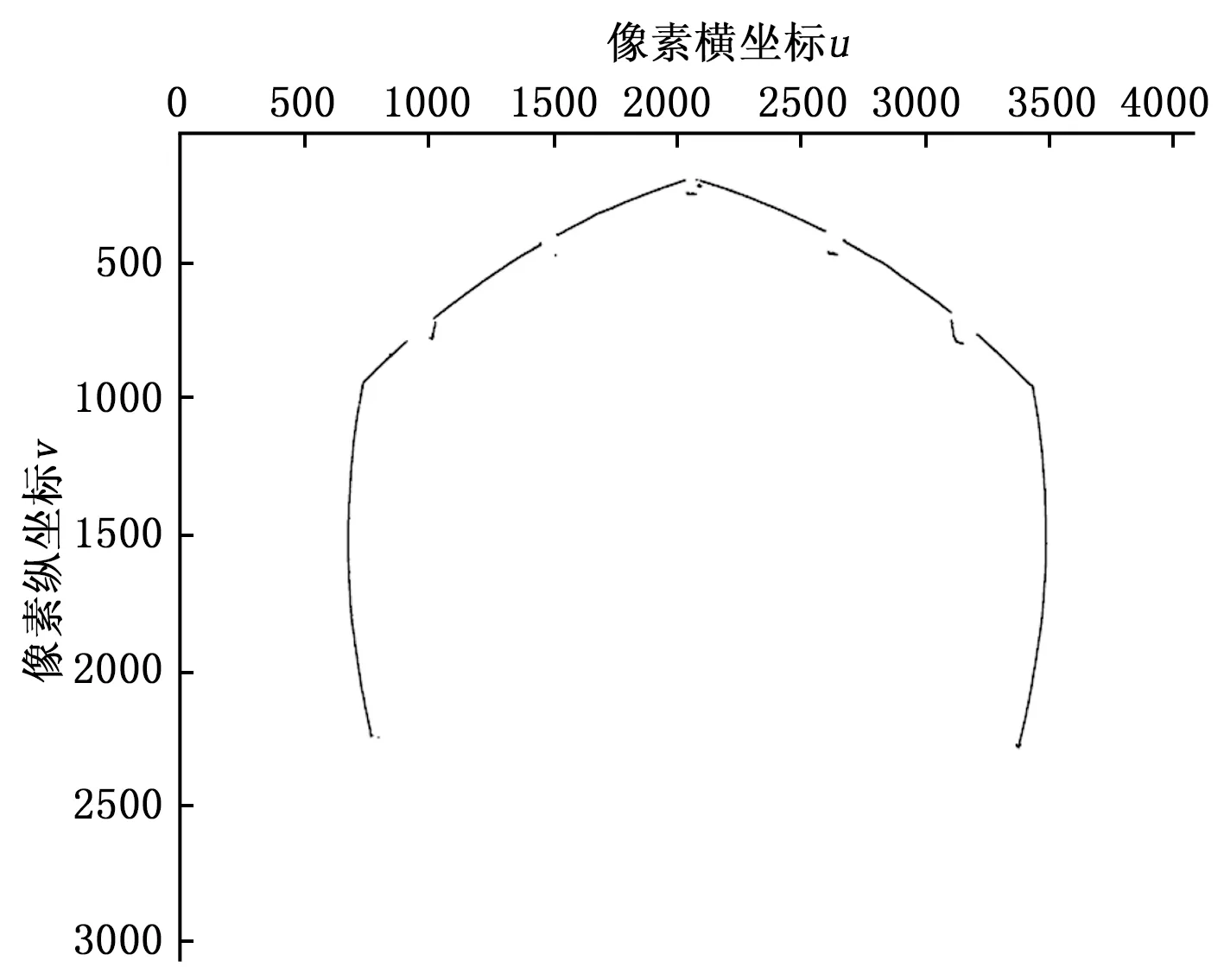
图8 实际断面轮廓像素坐标图
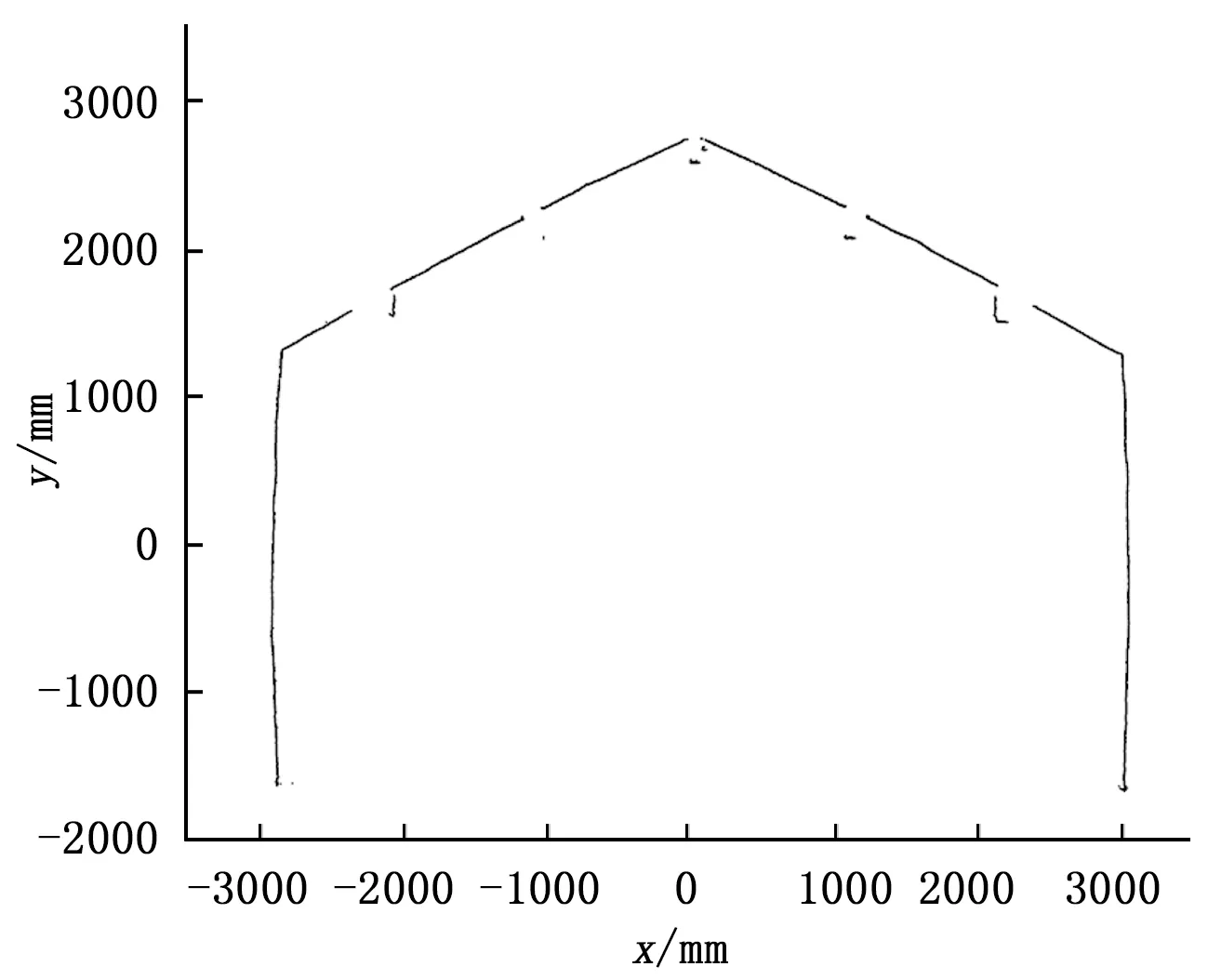
图9 实际断面轮廓还原图
通过滤光片的作用,所拍摄出来的图片灰度值变化很明显,根据灰度值的变化情况通过边缘解析算法提取出激光线边缘的像素坐标,如图8所示。对所提取出的像素坐标利用标定表格进行真值匹配,基准点坐标对应二维空间实际基准点坐标,非基准点采用插值处理,最终将畸变图像进行还原,得出实际断面轮廓图如图9所示。由图9视觉测量分析可以看出,断面轮廓得到了很好的还原,房间最大宽度为5 968.10 mm,最大高度为4 402.89 mm,通过实际测量,系统测量精度完全能够达到±5 mm以内,能够满足轨道交通隧道横断面轮廓测量误差标准。
4 总结
本文针对轨道交通隧道横断面近景大范围视觉测量系统进行摄像机标定的问题,设计实现了适用于大范围测量的多阵列圆的大型标定板,并基于该种标定板提出了区域生长重心法,利用区域生长法和灰度重心法进行图像分割时的各自优势,将两种方法相结合提取基准圆上的基准点,并进行实验验证和分析。利用该方法,能够提高较为宽泛的视觉测量角度范围,不但能够在使用鱼眼镜头达到视野全覆盖情况下进行基准点提取,而且能够提高视觉测量时系统的标定和重建精度,保证在视觉测量过程中的可靠性和鲁棒性。很好的解决了大型标定板上多阵列圆的基准点提取问题,有利于在进行近景大范围视觉测量时的相机标定工作,提高视觉测量的系统标定精度。
[1] 夏仁波, 刘伟军, 赵吉宾, 等. 基于圆形标志点的全自动相机标定方法[J]. 仪器仪表学报,2009(2): 368-373.
[2] 牛海涛, 赵勋杰. 采用棋盘格模板的摄像机标定新方法[J]. 红外与激光工程,2011(1): 133-137.
[3] 孟海岗. 基于平面约束的CCD相机标定方法改进[D]. 长春:吉林大学,2009.
[4] 吴凡路, 刘建军, 任 鑫, 等. 基于圆形标志点的深空探测全景相机标定方法[J]. 光学学报,2013,(11): 147-153.
[5] Andrew Fitzgibbon, Maurizio Pilu, Robert B. Fisher. Direct Least Square Fitting of Ellipses[J]. IEEE Transaction on Pattern Analysis and Machine Intelligence, 1999, 21 (5): 476-480.
[6] Yu Qiao, S. H. Ong. Arc-based evaluation and detection of ellipses[J]. Pattern Recognition, 2007, 40 (7): 1990-2003.
[7] 夏瑞雪, 卢荣胜, 刘 宁, 等. 基于圆点阵列靶标的特征点坐标自动提取方法[J]. 中国机械工程,2010,(16): 1906-1910.
[8] 张春燕, 邹 伟. 一种鱼眼镜头标定板的设计、检测与排序方法[J]. 计算机工程与应用,2015,(15): 188-192.
[9] 徐 鹏, 汪建业, 王燕儒. 摄像机标定中靶标圆心像点坐标的精确计算[J]. 红外与激光工程,2011(7): 1342-1346.
[10] Luis A, Agustín S, Javier S. Robust detection and ordering of ellipses on a calibration pattern, 0029[R]. France: University Institute for Cybernetic Sciences and Technologies, 2004.
[11] 许 敬, 张 合, 王晓锋. 基于特征点和区域生长的目标图像分割方法[J]. 探测与控制学报,2012(1): 6-9.
[12] 张小艳, 王晓强, 白福忠, 田朝平, 梅秀庄. 基于改进灰度重心法的光带中心提取算法[J]. 激光与红外,2016(5): 622-626.
[13] H C van Assen, M Egmont-Petersen, J H C Reiber. Accurate object localization in gray level images using the center of gravity measure: accuracy versus precision [J]. IEEE Transactions on Image Processing, 2002,11(12): 1379-1384.
ExtractionTechnologyofDatumPointsforLargeandMulti-arrayCircularCalibrationPlateBasedonRegionGrowingBarycenterMethod
Yu Jialei1,He Yuelei1,Gong Peiyi2,Tang Youfu2
(1.School of Urban Transportation, Shanghai University of Engineering Science, Shanghai 201620, China; 2.Shanghai Xintie Mechanical & Electrical Technology Co., LTD., Shanghai 201100, China)
Towards to the problem of vision measurement on the large profile measurement of rail transit tunnel, research and design of a large and multi-array circular calibration plate for system calibration work. The method of region growing barycenter is proposed to extract the datum points on the calibration image. Combining the region growing method and the gray barycenter method, the seed point of each datum circle are searched by rough location and while 4 neighborhood pixels of the seed points’pixel are considered for region growth. Then the gray barycenter method is used to extract the barycenter of the growing area as the datum point. In order to eliminate the effect of the image distortion, the nonlinear change datum points is substituted for the seed points of the linear datum circle. This method not only ensures the reliability and robustness of the feature detection process, but also can be used for the extraction of the datum points of the large and multi-array circular calibration plate. The profile of reduction experiment was carried out by carry a fisheye lens to shoot the simulation of tunnel cross section with 6 m. The experimental results show that the pixel coordinate error of the datum points extracted by this method can reach within 2pixel. The system precision can reach within ±5 mm and fully meet the error standard for the cross section measurement of rail transit tunnel.
vision measurement; large calibration plate; multi-array circle; region growing barycenter method; datum points
2017-04-17;
2017-05-18。
上海市科学技术委员会地方院校能力建设资助项目(14110501300)。
余佳磊(1992-),男,江苏徐州人,硕士研究生,主要从事视觉测量及轨道检测设备研发方向的研究。
何越磊(1972-),男,辽宁锦州人,教授,硕士研究生导师,主要从事轨道交通安全与检测技术方向研究。
1671-4598(2017)11-0146-04
10.16526/j.cnki.11-4762/tp.2017.11.037
TP391
A
猜你喜欢
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
汽车维修与保养(2020年11期)2020-06-09
化工设计(2020年6期)2020-01-13
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
劳动保护(2018年8期)2018-09-12
山东工业技术(2017年24期)2017-12-29
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年23期)2017-02-02
