
微型发动机温度限制保护闭环控制设计方法
2017-12-14 10:20缪柯强
航空发动机 2017年3期
缪柯强,王 曦
(1.北京航空航天大学能源与动力工程学院,2.先进航空发动机协同创新中心:北京100191)
微型发动机温度限制保护闭环控制设计方法
缪柯强1,2,王 曦1,2
(1.北京航空航天大学能源与动力工程学院,2.先进航空发动机协同创新中心:北京100191)
针对微型涡喷发动机转子转速闭环设计的控制结构中涡轮出口温度对燃油供给率变化敏感的问题,尤其在快速推油门杆时可能会超温,提出了1种带涡轮出口温度限制保护的闭环限制控制器的设计方法。该方法采用了双回路的闭环结构方式,并采用控制参数相似变换的增益调度增量式PI控制方法,实现了稳态/过渡态的发动机转速、温度闭环控制,所述算法在Simulink环境下进行了地面和高空的仿真验证。结果表明:控制系统在保证转子转速伺服跟踪性能的要求下还具有温度保护功能。
微型涡喷发动机;超温保护;增益调度;伺服跟踪
0 引言
微型涡喷发动机是1个复杂的气动热力机械,转速可高达每分钟十几万转、涡轮前温度为1100~1200℃,其非线性特性随飞行高度、飞行马赫数的不同而剧烈变化。发动机转速、温度等必须工作在设计安全限制条件内,发动机控制器在设计阶段就必须考虑这一问题,这就要求不仅应对转速闭环回路的鲁棒伺服跟踪性能进行设计,也应同时对温度的安全保护限制进行设计。中国对微小型发动机的研究起步较晚[1],目前虽然实现了全自动控制[2],但是常规的安全保护限制设计采用极值超限判断的硬切油的方式以达到保护涡轮温度不超温的目的。这种简单的保护设计往往因切油规律不合适而引发转速闭环系统的转速摆动,甚至产生燃烧不稳定等问题[3]。
此外,在新型微型涡喷发动机研制开发阶段,在初步设计过程中很难避免存在漏洞和缺陷,控制系统的设计是否合理、完善,尚需经过发动机整机试验和高空研制才能评估。新研制开发的高性能发动机在试验之前如存在设计缺陷,直接进行系统试验可能会带来风险。因此,必须考虑到如何在设计研制阶段最大限度地降低这种风险。微型涡喷发动机控制系统的数字仿真是这一设计阶段评估控制系统设计合理的重要环节[4]。
微型涡喷发动机的常规控制算法有PID控制、模糊控制和自适应控制等[5-6],针对上述微型涡喷发动机温度保护闭环控制的设计问题以及为了避免全物理试验验证发生危险情况,本文提出1种微型涡喷发动机带温度保护的增益调度PI控制器的闭环控制设计方法,采用该方法建立了微型涡喷发动机地面、高空的增益调度实时模型,构建了带涡轮后温度限制保护的微型涡喷发动机转速闭环控制系统。
1 微型涡喷发动机增益调度线性简化模型
微型涡喷发动机在飞行包线范围内工作时,其非线性气动热力学特性变化非常明显。考虑到发动机非线性模型由于需要计算各部件的气动热力学方程,计算复杂,迭代量大[7],计算速度难以保证系统实时性要求[8],而微型涡喷发动机的控制系统对实时性有较严格要求[9],因而采用线性化模型代替非线性模型[10],由于线性模型的适用范围仅局限于提取线性模型的稳态点附近,为了保证非提取点处模型的计算精度,采用按发动机换算转速ncor进行增益调度的方法建立实时模型。
根据文献[11]中已建立的微型涡喷发动机部件级非线性气动热力学模型,用顺数法从非线性模型中提取出发动机在不同转速50400(慢车转速)、57600、64800和72000 r/min(最大转速)下的稳态工作点线型模型。
微型涡喷发动机燃油计量执行机构设计为电压驱动式,其动态响应相对于发动机转速的动态响应较快,可忽略。燃油流量的输出增益是输入电压的分段组合函数,带执行机构的发动机换算转速ncor对电压的传递函数模型计算结果见表1。其传递函数为
式中:Gn,V为换算转速ncor对电压V的传递函数;Kn为传递系数;s为复变量;a为由系统结构参数决定的常数。
带执行机构的发动机涡轮出口温度T5对电压V的传递函数模型计算结果见表2。其传递函数为
式中:GT5,V为发动机涡轮出口温度T5对电压V的传递函数;KT5为传递系数;s为复变量;a和b为由系统结构参数决定的常数。
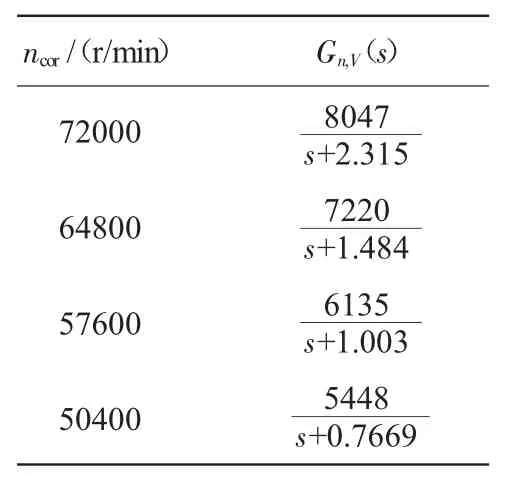
表1 带执行机构的发动机换算转速对电压的传递函数模型
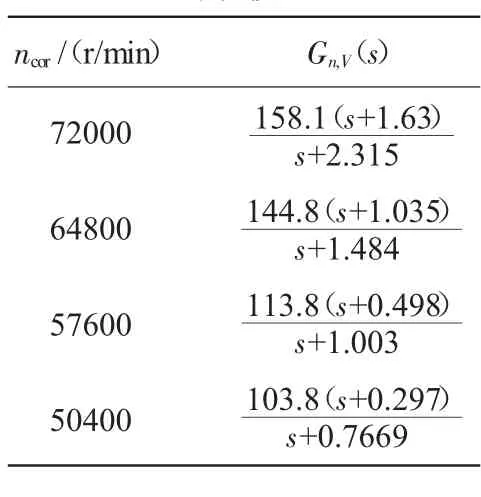
表2 带执行机构的发动机涡轮出口温度对电压的传递函数模型
通过增益调度方法建立从慢车到最大转速大偏离过渡态带执行机构的发动机换算转速对电压的传递函数模型
式中:Gn,V为换算转速ncor对电压V的传递函数;Kn为传递系数;s为复变量;a为由系统结构参数决定的常数;ncor为发动机换算转速。参数Kn、a根据发动机换算转速ncor线性插值计算。
从慢车到最大转速大偏离过渡态带执行机构的发动机涡轮出口对电压的传递函数模型
式中:GT5,V为发动机涡轮出口温度T5对电压V的传递函数;KT5为传递系数;s为复变量;a和b为由系统结构参数决定的常数;ncor为发动机换算转速。参数KT5、a、b根据发动机换算转速ncor线性插值计算。
高空飞行条件下,采用发动机相似变换原理[12],可得发动机换算转速对电压的传递函数
式中:Gn,V为换算转速ncor对电压V的传递函数;n为发动机实际转速;ncor为发动机换算转速;P2为发动机进口总压。
发动机涡轮出口温度对电压的传递函数
式中:GT5,V为发动机涡轮出口温度T5对电压V的传递函数;n为发动机实际转速;ncor为发动机换算转速; P2为发动机进口总压;T2为发动机进口总温。
2 带有温度限制保护的控制器设计
针对传统的微型涡喷发动机单回路转子转速控制装置中涡轮出口温度有可能超温而导致损坏涡轮部件的问题,本文提出了1种主回路采用转子转速闭环调节、辅助回路带有温度限制保护功能的双回路控制器,在闭环系统中的结构如图1所示。
控制器的控制逻辑如图2所示,从结构上考虑了温度超温的保护要求,采用在转子转速主控回路上并联温度辅助回路并通过低选逻辑实现主辅回路的切换控制。
图2中Vmax、Vmin为控制器硬件所能输出电压的最大、最小限制。
为避免双回路控制器在切换过程中出现的积分饱和问题,采用积分前值处理方法,即将前一时刻的控制器输出作为本时刻的积分初值,如图3所示。
对于转速控制回路稳态控制器采用频域分析法进行设计,在4个稳态工作点设计的转速闭环PI控制器为Kp(,n1+,控制参数见表3。
对于温度限制保护回路稳态控制器,同样采用频域分析法进行设计,在4个稳态工作点设计的温度闭环PI控制器为K(1+),控制参数见表4所示。
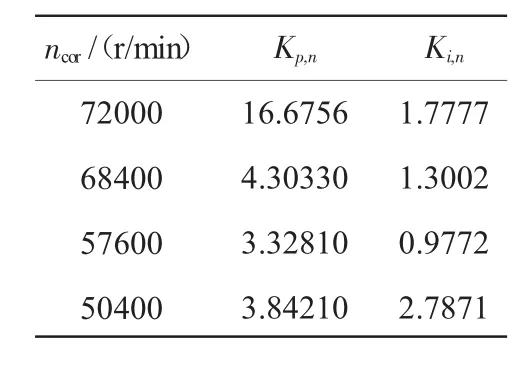
表3 转速控制器PI参数
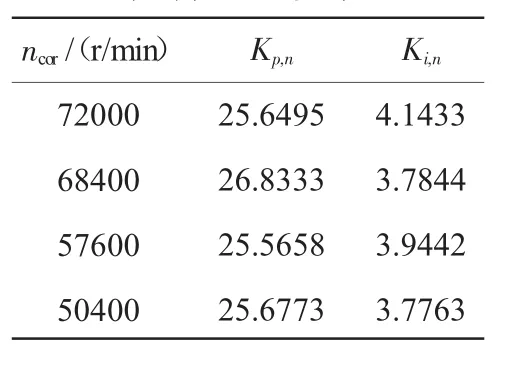
表4 涡轮出口温度限制保护控制器PI参数
对转速控制回路进行闭环系统的阶跃响应仿真,在稳态点不同转速下的转速响应曲线如图2所示。
对温度限制保护控制回路进行闭环系统阶跃响应仿真,在稳态点不同转速下的转速响应曲线如图3所示。
从图2、3仿真结果可知,在各稳态工作点,对于主回路转速偏差的动态调节时间均在2 s以内,无超调,温度限制保护闭环回路的温度偏差动态调节时间均在0.3 s以内,无超调。
增益调度是用于非线性动态控制系统的1项有效技术[13-14],取换算转速ncor为调度变量,将4个稳态控制器组合为1个增益调参控制器,设计的转子转速增益调度控制器Kn(ncor)为
式中:Kn为发动机转子转速增益调度控制器;Kp,n为转子转速增益调度控制器比例系数;Ki,n为转子转速增益调度控制器积分系数;s为复变量;ncor为发动机换算转速。
式中:Kn涡轮出口温度增益调度控制器;Kp,n为涡轮出口温度增益调度控制器比例系数;Ki,n为涡轮出口温度增益调度控制器积分系数;s为复变量;ncor为发动机换算转速。
考虑到控制器在高空飞行条件下的适应性,采用相似变换原理[15],对PI参数进行相似变换
式中:Kp为比例系数;(Kp)cor为换算比例系数;Ki为积分系数;(Ki)cor为换算积分系数;T2为发动机进口总温;P2为发动机进口总压。
3 算例仿真
按上述计算结果获得的转子转速控制器进行如下的稳态、过渡态性能仿真验证。
首先,在地面高度为0 km、马赫数为0条件下,进行地面仿真,转子转速指令按图4实线所示。
从图中可见,0~50 s为小幅推油门杆的仿真情况。0~10 s为等转子转速52000 r/min控制阶段,10~12 s为加速过渡态阶段,12~20 s为等转子转速57000 r/min控制阶段,20~22 s为加速过渡态阶段,22~30 s为等转子转速62000 r/min控制阶段,30~32 s为加速过渡态阶段,32~40 s为等转子转速66000 r/min 控制阶段,40~42 s为加速过渡态阶段,42~50 s为等转子转速70000 r/min控制阶段。
50~90 s为小幅收油门杆的仿真情况,50~52 s为减速过渡态阶段,52~60 s为等转子转速66000 r/min控制阶段,60~62 s为减速过渡态阶段,62~70 s为等转子转速62000 r/min控制阶段,70~72 s为减速过渡态阶段,72~80 s为等转子转速57000 r/min控制阶段,80~82 s为加速过渡态阶段,82~90 s为等转子转速52000 r/min控制阶段。
90~120 s为快速推收油门杆的仿真情况,90~95 s为快速加速过渡态阶段,95~105 s为等转子转速70000 r/min控制阶段;105~110 s为快速减速过渡态阶段,110~120 s为等转子转速52000 r/min控制阶段。
仿真结果如图4虚线所示。由于增益调度在整个过渡态、稳态中发挥了按工作条件调度控制器参数的作用,不同的过渡状态下调节时间都在2 s以内,超调量小于1%,且均能够获得无静差稳态性能。
整个仿真过程中,涡轮出口温度如图5实线所示,温度限制如图5虚线所示。由图5可知,涡轮出口温度在整个过程中未超限。
全仿真过程工作的控制器的状态标志如图6所示,1代表主控制回路转速控制器起作用,2代表辅助回路温度限制保护控制器起作用。在40~42 s和90~95 s的加速过程中,在 41.5 s和 94.5 s时刻,T5温度达到温度限制值970 K,控制器由转速控制器切换为温度限制保护控制器进行限制,超温危险解除后切回转速控制器。
其次,在高空10 km、Ma=0.8飞行条件下进行仿真验证,转速指令如图7实线所示,转子转速响应仿真曲线如图7虚线所示,温度响应仿真曲线如图8所示,全仿真过程工作的控制器的状态标志如图9所示。
从图7中可见,在高空飞行条件下,由于增益调度和控制参数换算在整个过渡态、稳态中发挥了按工作条件调度控制器参数的作用,使得不同的过渡态下,转速的调节时间在5 s以内,超调量小于1%,且能获得无静差稳态性能。
对应的涡轮出口温度响应曲线和温度限制线如图8实线和虚线所示,从图中可见,当温度碰到限制值时,控制器进行切换。控制回路状态标志如图9所示,在40~42 s和90~95 s的过程中,控制器由转速控制器切换为温度限制保护控制器,对温度进行实时保护。
4 结束语
将温度限制保护的闭环控制问题在微型涡喷发动机转子转速主控制回路中进行综合设计,设计了带T5限制保护的双回路增益调度闭环PI控制器,在Simulink环境下进行了地面、高空性能仿真,验证了温度限制保护算法的有效性。
[1]郑颖.微型涡喷发动机数字控制系统设计研究[D].哈尔滨:哈尔滨工程大学,2012.ZHENG Ying.Research on digital control system design for micro turbine engine[D].Harbin:Harbin Engineering University,2012.(in Chinese)
[2]王曦,杨杰,杨艳.100N推力级微小型涡喷发动机数字式电子控制器研究[J].航空发动机,2006,32(1):38-42.WANG Xi,YANG Jie,YANG Yan.Research of digital electronic controller for 100N-class micro turbojet engine [J].Aeroengine,2006,32(1):38-42.(in Chinese)
[3]谢伟.微型涡喷发动机电子控制器设计技术研究[D].南京:南京航空航天大学,2013.XIE Wei.Research on design technology of electronic control unit for micro turbine engine[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2013.(in Chinese)
[4]云超,李小民,郑宗贵.基于Matlab/Simulink的硬件在回路无人机仿真系统设计[J].计算机测量与控制,2012,20(12):3306-3308.YUN Chao,LI Xiaomin,ZHENG Zonggui.UAV simulation system design based on matlab/simulink [J].Computer Measurement and Control,2012,20(12):3306-3308.(in Chinese)
[5]张天宏,李秋华.微型涡喷发动机自适应控制实验研究[J].航空动力学报,2007,22(3):471-474.ZHANG Tianhong,LI Qiuhua.Adaptive control study and experimental validation of a micro turbine engine[J].Journal of Aerospace Power,2007,22(3):471-474.(in Chinese)
[6]Annaswamy A M,Aziz A.An adaptive controller for aerospace vehicle[R].AIAA-92-4413-CP.
[7]徐鑫,张天宏,盛汉霖.基于动态系数法的微型涡喷发动机实时建模[J].中国机械工程,2015,26(2):243-247.XUXin,ZHANGTianhong,SHENG Hanlin.ResearchonMTE real-time modeling based on dynamic coefficient method[J].China Mechanical Engineering,2015,26(2):243-247.(in Chinese)
[8]王斌,王曦,石玉麟,等.一种航空发动机的分段实时线性动态模型[J].航空动力学报,2014,29(3):696-701.WANG Bin,WANG Xi,SHI Yulin,et al.A real-time piecewise linear dynamic model of aeroengine[J].Journal of Aerospace Power,2014,29(3):696-701.(in Chinese)
[9]石伟,韩树军,丁水汀.微型涡喷发动机控制算法研究[J].航空发动机,2008,34(3):46-48.SHI Wei,HAN Shujun,DING Shuiting.Investigation of micro-turbojet engine control algorithm[J].Aeroengine,2008,34 (3):46-48.(in Chinese)
[10]Reed J A,Afjeh A A.Computational simulation of gas turbine(partⅡ):extensible domain framework[J].Journal of Engineering for Gas Turbines and Power,2000,12(2):377-386.
[11]缪柯强.单轴发动机数学模型研究[D].北京:北京航空航天大学,2015.MIAO Keqiang.Research on mathematical model of single shaft engine[D].Beijing:Beihang University,2015.(in Chinese)
[12]廉筱纯,吴虎.航空发动机原理[M].西安:西北工业大学出版社,2005:289-290.LIAN Xiaochun,WU Hu.Principle of aeroengine [M].Xi’an:Northwestern PolytechnicalUniversity Press,2005:289-290. (in Chinese)
[13]赵连春,杰克马丁利.飞机发动机控制:设计、系统分析和健康监视[M].北京:航空工业出版社,2012:124-128.Jaw L C,Mattingly J D.Aircraft engine controls:design,system analysis,and health monitoring[M].Beijing:Aviation Industry Press,2012:124-128.(in Chinese)
[14]Hanz Richter.A multi-regulator sliding mode control strategy for output-constrained systems[J].Automatica,2011,47(10):2251-2259.
[15]姚华.航空发动机全权限数字电子控制系统[M].北京:航空工业出版社,2012:183.YAO Hua.Fullauthority digitalelectronic controlsystem for aeroengine [M].Beijing:AviationIndustry Press,2012:116.(in Chinese)
Design Method of Close Loop Controller with Temperature Limitation Protection for Micro Gas Turbine Engines
MIAO Ke-qiang1,2,WANG Xi1,2
(1.School of Energy and Power Engineering,Beihang University, 2.Collaborative Innovation Center for Advanced Aero-Engine:Beijing 100191,China)
In order to solve the problem that the turbine outlet temperature is sensitive to the change of fuel flow in the close-loop designed rotor speed control structure of micro gas turbine engines,especially pushing the throttle lever quickly,a method in designing the close-loop controller with turbine outlet temperature protection was presented.Dual circuit close-loop structure was adopted in this method.The gain-scheduled incremental PI control law with corrected control parameters was used.Set-point and transient close-loop control was realized in the rotor speed and temperature protection loop.The algorithm above was simulated in the standard sea level and high altitude environment in the Simulink platform.The result proves that the designed control system has the ability of rotor speed servo tracking and temperature protection at the same time.
micro gas turbine engine;over-temperature protection;gain-schedule;servo tracking
V 257
A
10.13477/j.cnki.aeroengine.2017.03.010
2016-11-27 基金项目:航空动力基础研究项目资助
缪柯强(1993),男,在读硕士研究生,主要研究方向为航空发动机控制;E-mail:kqmiao@buaa.edu.cn。
缪柯强,王曦.微型发动机温度限制保护闭环控制设计方法[J].航空发动机,2017,43(3):50-55.MIAO Keqiang,WANG Xi.Design method of close loop controller with temperature limitation protection for microgas turbine engines[J].Aeroengine,2017,43(3):50-55.
(编辑:赵明菁)
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
北京航空航天大学学报(2021年6期)2021-07-20
汽车维修与保养(2019年7期)2020-01-06
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年1期)2017-11-24
演艺科技(2017年1期)2017-03-09
汽车维护与修理(2015年6期)2015-02-28
汽车与新动力(2014年3期)2014-02-27
