某链式直线推送装置的设计与位置控制
2017-12-06 02:22侯保林
兵器装备工程学报 2017年11期
周 瑾,侯保林
(南京理工大学 机械工程学院, 南京 210094)
某链式直线推送装置的设计与位置控制
周 瑾,侯保林
(南京理工大学 机械工程学院, 南京 210094)
在国内外现有的刚性链条结构基础之上,设计了一种新型刚性链式的直线推送装置,并在Recurdyn中建立了虚拟样机模型进行位置控制。根据啮合理论与齿轮齿廓线的知识,建立刚性链的啮合曲线和链轮的齿廓曲线。分别运用传统PID控制与自适应模糊PID控制方法建立控制系统,通过Matlab和Recudyn的联合运用,完成了位置控制系统的仿真。对仿真结果进行对比与分析,表明模糊自适应PID控制方法可实现较好的位置控制。
刚性链;虚拟样机;模糊PID控制系统;联合仿真
链条是一种重要的机械基础件。随着设计技术的不断发展,链条不再局限于传统意义上的传动链、输送链,曳引链,出现了越来越多的新式链式结构[1-3]。例如刚性链条,既可以像普通的链条的一样自由折叠,又具有千斤顶的刚性。此刚性链条和驱动器组成的执行机构,可以代替液压缸、气压缸和电动推杆等广泛地应用于需要大行程推送载荷的场合[4]。优点是:减少设备的体积,节约空间。本文以新型的刚性链条为基础,设计了一种链式直线式推送装置,并且运用传统的PID与模糊自适应PID控制算法对位置进行控制;通过Matlab与Recurdyn的联合仿真,对两种控制方法进行了对比分析。
1 链式直线推送装置的工作原理
此机构的内部结构简图如图1所示。推送装置主要包括啮合的链条,链轮,引导链条运动的引导轨道,部分的外壳以及连接件等。链条为双排的特殊啮合链条。内啮合链板与外啮合链板、两排链条,通过销轴与套筒连接。
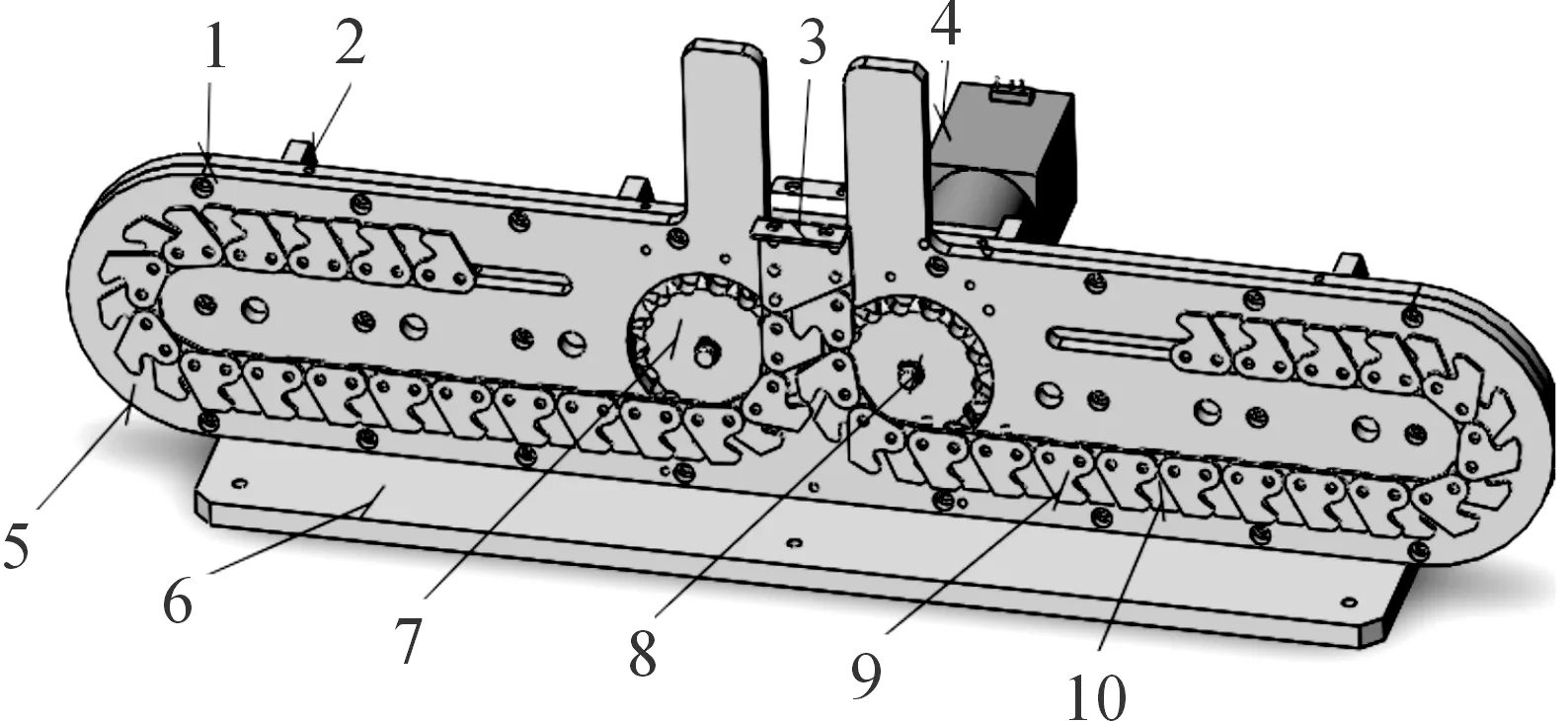
1.外壳; 2.加强板; 3.外链板头; 4.减速器+电机;5.引导架; 6.底板; 7.从动链轮; 8.主动链轮;9.外联板; 10.内链板
图1 直线式推送装置的结构简图
主动链轮8顺时针转动时,链轮的轮齿、轮槽带动链的滚子一起转动,链条导轨两边的链条由于导轨的引导作用,滚子随着链轮一起运动时,也沿着导轨面进行运动,从而啮合面可以顺利啮合,导轨两侧的链条可以相互啮合成用于推送的刚性杆,可以在传动方向上受力,推动物体一起做推出的运动。当主动链轮8逆时针转动时,带动链条的滚子一起运动,同样,沿着导轨,原本啮合的链条就可以脱离而分开,实现运动的复原。
2 链式直线推送装置的设计
根据设计要求,此装置中链条的节距取P为15.875 mm,链轮取齿数Z为14。相应的零件,机构的设计尺寸以此为基础。
2.1 基本的轮廓曲线
类似齿轮的展成加工方法,假想把链条的滚子视为刀具,对链轮的轮坯进行假想切割,获得链轮的理想齿廓曲线。
如图2所示,链轮的瞬心圆半径为r2,链轮的齿形(图2中代表套筒的小圆)与坐标系(O1-x1,y1)固连,假设要使链条齿形上的N点为啮合点,必须使链条(刀具)向左平移L的距离;与此同时,链轮应该逆时针转动θ,M点的法线才会穿过瞬心点P,M点移动到瞬心点P的位置上,套筒上的N点才能成为接触点。则L与θ之间的关系
L=r2θ
(1)
链条上套筒的参数方程如下
(2)
式中:r1为套筒的半径;h为链条的变量,h=R2-r2;γ为套筒上N点的切线与x1轴的夹角。
根据图中的几何关系,得L和h之间的关系
L=htanγ
(3)
再根据坐标变换原理,将坐标(O1-x1,y1)变换到链轮坐标系(O2-x2,y2)。变换矩阵为
(4)
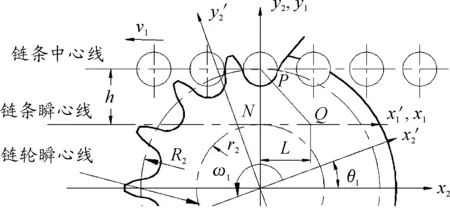
图2 链轮的轮齿廓推导原理图
因此链轮齿形的曲线方程为
(5)
将前面公式中的x1,y1,θ,M21代入,整理即可。
所以当在r2取34.8 mm时,得到的链轮齿廓曲线如图3所示。
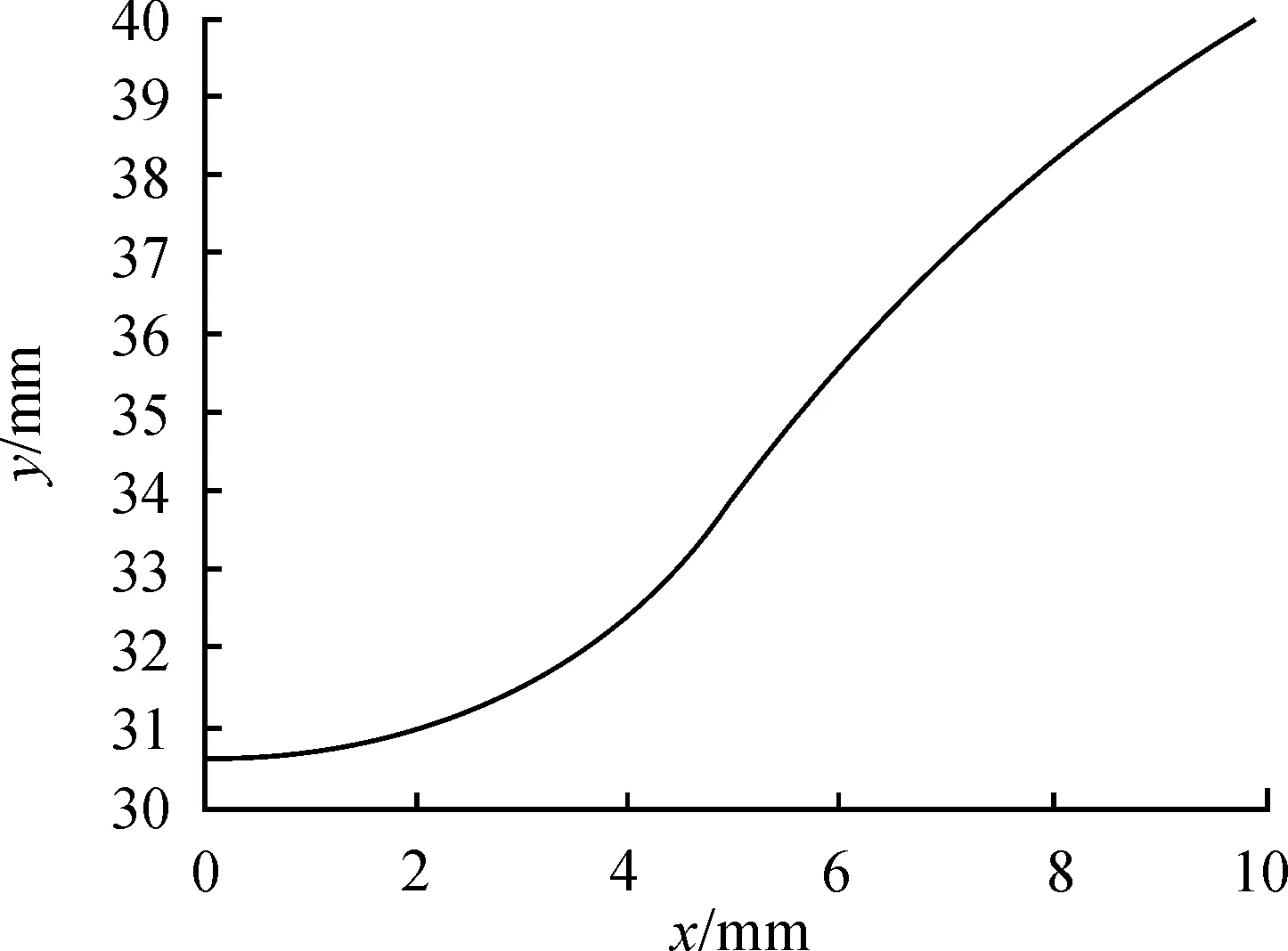
图3 链轮的齿廓曲线
2.2 基本链节
如图4所示,这种刚性啮合链条的基本链节分为外链节与内链节。基本链节的联接方式与滚子链相同,外链板与销轴形成外链节,内链板与套筒之间形成内链节。
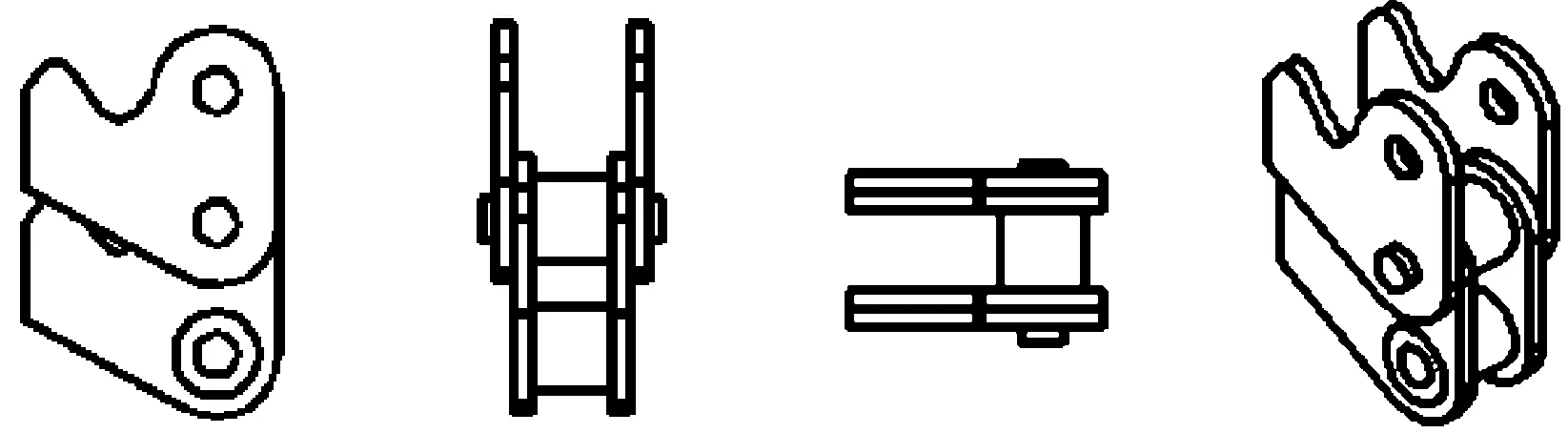
图4 基本链节图
2.3 仿真模型的建立
在Solidworks中完成模型的简化、装配,导入到Recurdyn中。在Recurdyn中对模型进行参数的设定与添加[5-6]。
选中零件,单击右键,将零件的材料修改为steel。单击force工具条中Rot.Axial添加载荷力矩。搭建各构件的拓扑关系[5]:引导架与基本的惯性坐标系固连,链轮与引导架铰接,有一个旋转自由度。每个滚子与内链板是固接,每个内链板与外链板之间相互铰接。所有构件之间的接触均采用实体接触。
建立Recuryn中机械模型与控制系统的关联。首先建立PIN,在Communicator工具包中选中Plant Input,单击Add,更改名称为liju,与驱动链轮转动的力矩建立关联。再建立POUT,选中Plant Output,单击Add,打开Expression对话框,通过定义表达式,实现POUT的建立。之后单击Communicator工具包中选中的Simulink,进行M文件的创建。
3 装置中链条的位置控制
3.1 初步拟定传动方案
为了实现对位置的控制,输入为链轮的转动角位移,输出为推板的位移。控制目标为1 s内链轮的角位移旋转3.14 rad,也就是推板的位置在竖直方向上运动h=πd/2=112 mm。考虑装置中链条的质量,推板载重10 kg。
分析此虚拟样机模型,是单自由度的多刚体机械系统,动力学方程相对复杂繁琐,所以在无需动力学方程的情况下,采用PID控制算法。考虑到控制模型具有一定的时变性,传统的PID控制的参数的调整的复杂性以及由于联合仿真模型的计算量大的问题。在传统的PID控制的基础上加入了模糊控制原理。
3.2 模糊PID控制系统的建立
自适应模糊PID控制器的系统结构主要由参数可调PID和模糊控制系统组成,其结构如图5所示[7]。
模糊PID控制系统的搭建的核心部分是进行模糊PID控制器的设计。控制器以误差e和误差变化ec作为输入,可以满足不同的时刻对PID参数自整定的要求。
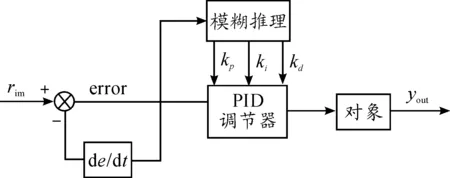
图5 模糊自适应PID控制系统结构
根据传统PID系统中kp、ki、kd对系统输出特性的影响,可以归纳出被控过程中对于不同的误差e和误差变化ec,参数kp、ki、kd的自整定规则:
1) 当误差e较大,为了加快响应速度,并防止因e瞬时增大引起的微分过饱和,应取较大的kp和较小的kd。防止积分过饱和,ki要小,通常取0;
2) 当误差e和误差变化ec适中,为减小超调与保证响应速度,kp取得稍小,ki要适中;
3) 当误差e较小时,为了保证系统稳态性,增大kp、ki的值,为了避免输出振荡,以及考虑系统的抗干扰能力,选取适当的kd。
根据要求,用于PID参数调整的模糊控制器采用二输入三输出的形式,以误差e和误差变化ec作为输入,PID控制器的3个参数P、I、D的修正Δkp、Δki、Δkd作为输出。之后确定语言变量,并确定语言值的隶属度函数,建立模糊控制规则以及最后对模糊控制器进行编辑[8-10]。
在Simulink中建立系统联合仿真框图,如图6。

图6 联合仿真框图
4 联合仿真结果分析
模糊PID控制系统中PID初始值kp0=4 700,ki0=3 000,kd0=800。最后得到传统PID控制下推板的位移与模糊PID控制下推板的位移曲线图,如图7所示。
分析图7中的曲线,首先可观察模糊PID控制响应曲线更平稳,鲁棒性更好,仿真运动更平稳。模糊PID的控制下,曲线的终点的坐标为(1,111.595 9),误差为m1:
(6)
传统PID的控制下,曲线的终点的坐标为(1,107.994 1),误差为m2:
(7)
比较可得,模糊PID控制下的精度相对更高,更接近控制目标的最终位置。且在进行参数的调试过程中,模糊PID的参数更好调节。所以最终选择模糊PID控制算法作为此装置的位置控制方法。
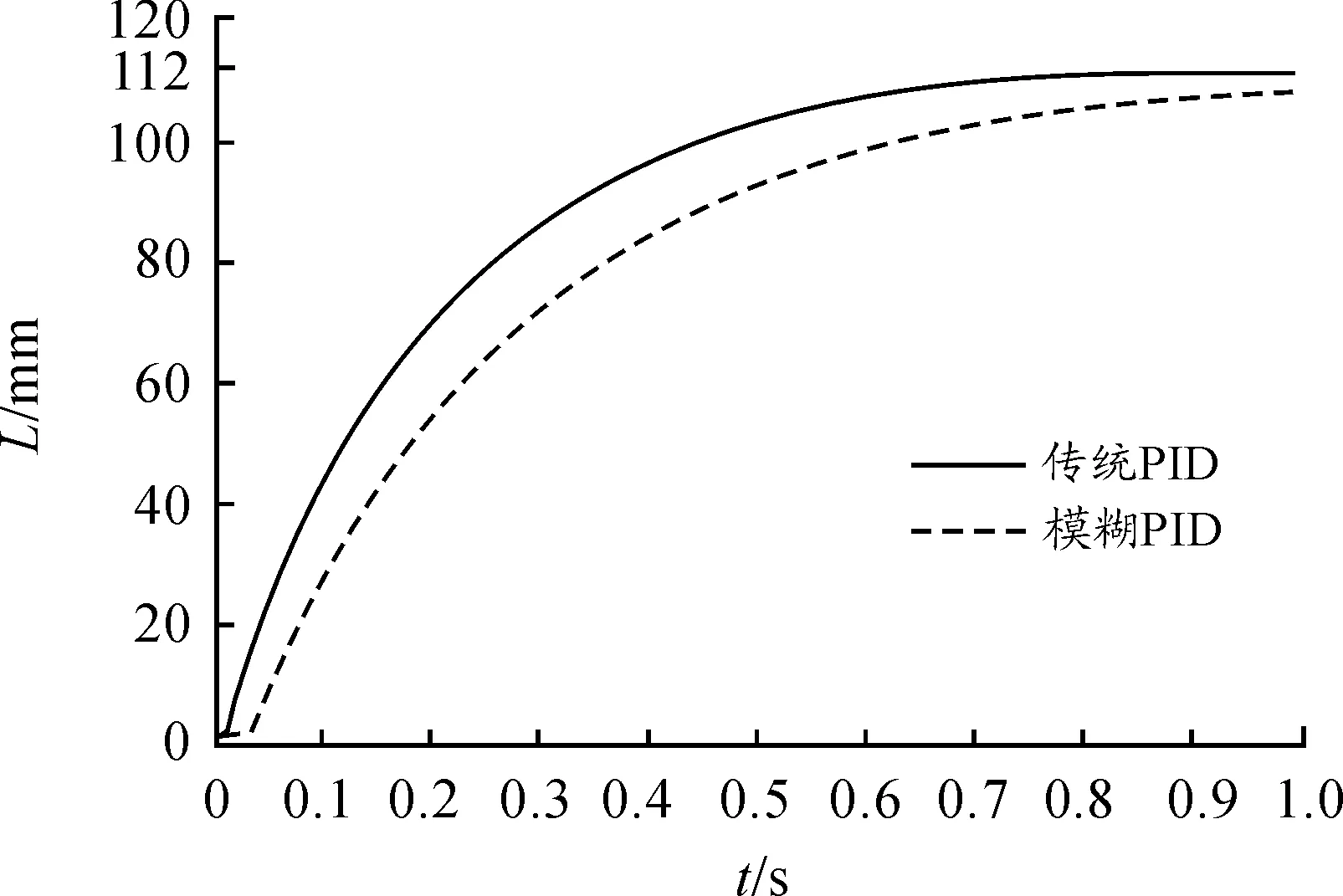
图7 PID控制下推板的位置曲线
5 结论
1) 本文根据啮合原理及齿廓曲线知识,设计了新型的刚性链,进而完成了链式直线推送装置的结构设计。
2) 通过PID控制方法对装置进行位置控制,结合Matlab和Recurdyn的联合仿真及结果分析,可得模糊PID控制,既保持了传统PID控制系统的原理简单、使用方便、控制精度高的优点,又具有更大的灵活性、整定性、控制进度更好。
[1] 孟繁忠,程亚兵,钱江.基于心形孔的Hy-Vo齿形链的啮合分析及其设计方法[J].机械工程学报,2012(13):8-12.
[2] 马勋.高速正时滚子链链轮齿形研究[D].济南:山东大学,2010.
[3] 王树人.齿轮啮合理论简明教程[M].天津:天津大学出版社,2005.
[4] 陈君.刮板输送机链条动态张力控制系统及其应用[J].工矿自动化,2012(1):103-104.
[5] 刘义.Recurdyn多体动力学仿真基础应用与提高[M].北京:电子工业出版社,2013.
[6] 胡延平,骆汉丰,高喜,等.液压链条张紧器的动力学建模与性能分析[J].合肥工业大学学报(自然科学版),2016(5):586-591.
[7] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2011.
[8] 许立,朱万鑫,施志辉.连续油管注入头链条系统力学分析[J].机械传动,2014(11):145-147,180.
[9] 殷云华,樊水康,陈闽鄂.自适应模糊PID控制器的设计和仿真[J].火力与指挥控制,2008(7):96-99.
[10] 屈毅,刘飞航,郭飞飞.模糊PID控制器的设计及其仿真[J].计算机仿真,2009(12):130-132,176.
(责任编辑周江川)
DesignandPositionControlofaChainLinearPushDevice
ZHOU Jin, HOU Baolin
(School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
On the basis of the existing rigid chain structure at home and abroad, a new type of rigid chain push device is designed, and a virtual prototype model is established in Recurdyn for position control. According to the meshing theory and the knowledge of the gear tooth profile, the meshing curve of the rigid chain and the tooth profile curve of the sprocket are established. The control system is established by using traditional PID control and adaptive fuzzy PID control method. The simulation of position control system is completed by the combination of Matlab and Recudyn. The simulation results are compared and analyzed, and the fuzzy adaptive PID control method can achieve better position control.
rigid chain; virtual prototyping; fuzzy PID control system; joint simulation
2017-07-10;
2017-08-10
周瑾(1990—),女,硕士研究生,主要从事机械结构设计研究。
装备理论与装备技术
10.11809/scbgxb2017.11.017
本文引用格式:周瑾,侯保林.某链式直线推送装置的设计与位置控制[J].兵器装备工程学报,2017(11):77-80.
formatZHOU Jin, HOU Baolin.Design and Position Control of a Chain Linear Push Device[J].Journal of Ordnance Equipment Engineering,2017(11):77-80.
U464.134
A
2096-2304(2017)11-0077-04
猜你喜欢
机床与液压(2022年7期)2022-09-17
心理学报(2022年7期)2022-07-09
煤(2022年6期)2022-06-13
山东体育学院学报(2022年1期)2022-04-15
皮肤病与性病(2021年3期)2021-07-30
西安航空学院学报(2021年1期)2021-07-20
科技与创新(2020年15期)2020-08-12
航空学报(2020年5期)2020-06-03
汽车维修技师(2018年8期)2019-01-15
汽车零部件(2018年11期)2018-12-08