
线控转向技术在国内外汽车领域的应用简介
2017-12-04 03:41孟永刚罗来军罗毅王军李永晨
汽车零部件 2017年11期
孟永刚, 罗来军, 罗毅, 王军, 李永晨
(联创汽车电子有限公司,上海 201206)
线控转向技术在国内外汽车领域的应用简介
孟永刚, 罗来军, 罗毅, 王军, 李永晨
(联创汽车电子有限公司,上海 201206)
随着新能源汽车和无人驾驶汽车的研究推广,一种新型的转向系统——线控转向系统应运而生。该系统取消了转向盘与转向轮之间的机械连接,解决了传统转向系统的种种弊端。介绍线控转向系统的基本组成及其工作原理,对比线控转向相对于电动助力转向的优势,总结线控转向在国内外发展的现状,分析线控转向在我国的专利申请情况,并展望线控转向良好的应用前景及其发展趋势。
线控转向技术;发展现状;发展趋势
0 引言
汽车动力转向系统[1]大致经历了机械转向系统、液压助力转向系统(Hydraulic Power Steering,HPS)、电控液压助力转向系统(Electro Hydraulic Power Steering,EHPS)、电动助力转向系统(Electric Power Steering,EPS)[2]的一个发展过程,目前EPS在我国已经进入批量生产阶段并装配在各类汽车上,且国内外可以提供量产EPS的企业也很多,如ZF、TRW、JTEKT、DIAS、东华等。
随着科学技术的发展,未来汽车将主要有4个发展趋势,即上汽集团所说的“新四化”——智能化、共享化、电动化和网联化。其中的智能驾驶或自动驾驶最近这几年在汽车行业如火如荼地开展起来。而在无人驾驶的应用中,除了相应的辅助传感器研发外,相应的助力转向系统也得到了更进一步的转变和升级。考虑EPS受限于安装空间、力传递特性、角传递特性等诸多因素不能自由设计和实现,一种新型的转向系统——线控转向系统(Steering-By-WireSystem,SBW)应运而生。该系统取消了转向盘与转向轮之间的机械连接,完全由电信号实现转向的信息传递和控制。为最小化驾驶员工作负荷,同时保持好的驾驶感觉,转向系的特性可根据驾驶任务、驾驶员需要和喜好、车辆固有特性、道路环境和交通条件主动而恰当地调整[3-7]。SBW系统具有路感好、反应速度快、整车安装方便、节省空间、安全性高、扩展性好等诸多优点,后文会做详细介绍。SBW给汽车转向特性的设计带来无限的空间,是汽车转向系统的重大革新。
1 工作原理
结合图1、图2对SBW的基本原理作一个介绍。SBW主要由3个部分组成,即转向盘总成(包含转向盘、回正力矩电机及相应传感器等),转向执行总成(包含前轮转向机构、转向执行电机及相应传感器等)和电子控制单元(包含主控单元和故障处理单元)。
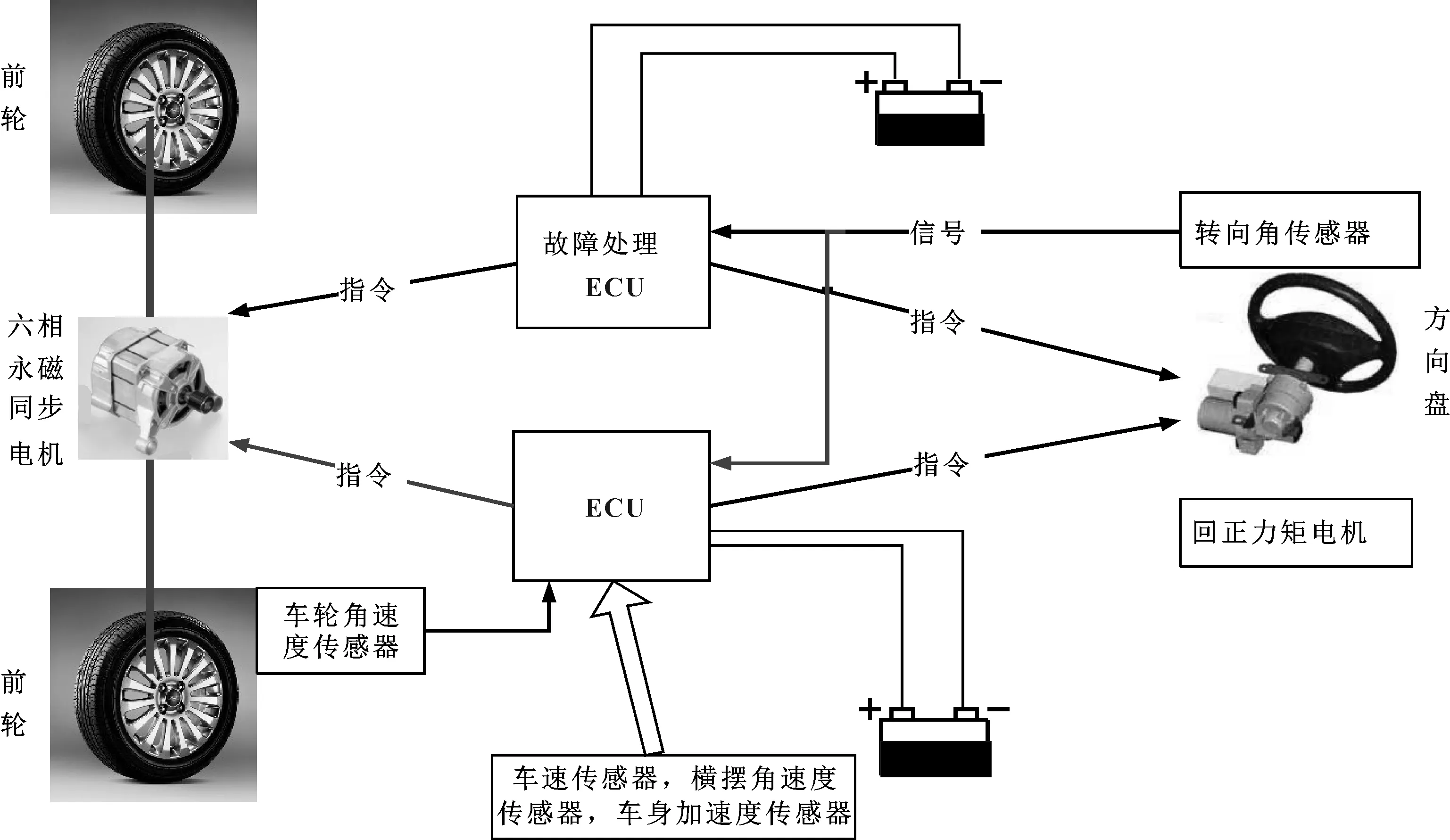
图1 SBW系统结构图

图2 SBW工作原理
当转向盘转动时,转矩传感器和转向角传感器将测量到的驾驶员转矩和转向盘的转角转变成电信号[8]发送给主控单元,然后主控单元通过相应传感器采集车速、横摆角速度、车身加速度等信号,并结合相应控制策略做出分析判断进而去控制转向执行总成实现合理转向,同时转向执行总成将车轮角速度传感器采集到的信息反馈给主控单元,主控单元再结合车况送出相应力矩指令给转向盘总成中的回正力矩电机,进而给驾驶员提供相对应的路感感受。故障处理单元是SBW中的重要模块,它包括一系列的监控和实施算法[9],可实现对主控单元的监控,一旦发现主控单元有错误信息或状态,故障处理单元会根据故障形式和故障等级做出相应的处理,确保驾驶员发现故障并可将车辆行驶到安全地带。
2 产品优势
对于SBW来说,它继承了EPS的诸多优点,如它像EPS一样可以对转向过程中的每个环节(转向、回正、中间位置)进行精确控制,从而提高汽车转向助力性能[10]。下述SBW具有的优点[11-15]是相较EPS而提出的,至于EPS的诸多优点这里不再一一赘述。
2.1 改善驾驶员的“路感”
线控转向系统中转向盘控制与前轮控制解耦,系统可以较好地过滤路面各种颠簸;在回正力矩控制方面,可以从信号中提取最能反映汽车实际行驶状态和路面状态的信息,作为转向盘回正力矩的控制变量,从而使车辆即使在崎岖的道路行驶时,也不会让驾驶员感觉转向盘发抖、震颤,实现优化的、个性化的路感。
2.2 反应速度快
车辆转向时,由于无传统机械连接,在前轮转向控制方面可以实现传动比的任意设置[16-17]。主控单元接收指令后,根据行车路况、转向盘转动力度、速度等进行综合计算后立刻实现转向,转向指令可以毫无迟滞地传递到车轮上,让驾驶员体验到真正的车随心动和随速助力。
2.3 整车安装方便
SBW采用柔性连接,使转向系统在车上布置更加灵活,转向盘可方便布置在需要的位置。如耐世特的静默方向盘TM系统搭载“完全可收缩式”转向管柱,在自动驾驶模式下可自动收缩至仪表板内,从而增加可用空间并提升驾驶舱舒适度,使驾驶员可以从事其他活动。
2.4 安全性高
SBW去除了转向柱等机械连接,因此在车辆碰撞时完全避免了管柱侵入对驾驶员的伤害,同时当把转向盘总成收缩或移至他处后,极大地保证了安全气囊的有效打开,从而极大地加强对驾驶员的安全保护。
2.5 便于扩展
SBW还可以根据车辆未来的发展趋势实现更高级的功能需求,如车道保持支持——当位于车辆上的传感器或摄像头发现车辆偏离车道时,SBW会根据车道情况自动输入转向信号,帮助车辆回到正确的行驶轨迹上来;自动泊车支持——自动泊车系统通过环境感知传感器检测实际的泊车环境,探测获取有效的泊车车位信息,通过SBW的支持,实现对车辆运动轨迹的精确控制,最终实现自动泊车入位功能。还有如主动转向支持、智能驾驶支持等。
3 国内外现状
3.1 国外状况
欧美企业研究线控转向技术较早。20世纪50年代,TRW和德国Kasselmann等对SBW系统的概念做出了大胆的设想,将方向盘与转向车轮之间用控制信号代替原有的机械连接[18-20]。2000年9月,奔驰与ZF在法兰克福车展上展示了线控转向系统。2017年Nexteer推出随需转向TM及静默方向盘TM系统,这两项技术均采用了耐世特线控转向技术,前者可实现驾驶员人为控制和自动驾驶控制之间更安全、更直觉的切换,后者能够修正车辆自动转向过程中方向盘的颤动和回正带来的干扰,从而显著降低操作疲劳,确保车辆安全平稳的行驶。最近,ThyssenKrupp计划在常州兴建世界最大的汽车转向系统生产基地,其线控转向系统也在开发中。
日本的Nissan于2013年在英菲尼迪Q50上首次搭载了DAS(Direct Adaptive Steering),参见图3,但2014年即因安全原因宣布召回。

图3 英菲尼迪SBW架构
世界排名第一的转向系统供应商JTEKT投入了大量资源重点研发线控转向系统,他们认为为了实现自动驾驶汽车,线控转向系统一定会取代如今的电动转向系统,这无法避免。而世界排名第三的电动转向系统供应商NSK对线控转向系统则持反对意见,他们认为线控转向技术过于昂贵,如今的电动转向系统完全可以满足自动驾驶汽车的需求。
3.2 国内状况
主要有一些大学和科研机构做预研,如吉林大学、上海交通大学、同济大学、北京理工大学、青岛科技大学、江苏大学、武汉科技大学等[17,21-22]。这些高校主要侧重于模型的搭建、算法的处理和仿真模拟等,有一些高校和机构做出了功能件或概念车。如在2004年上海国际工业博览会上,同济大学展示了“春晖三号”概念车(见图4(a)),其中一大亮点就是采用了线控转向技术。在2010年北京国际车展上,长安集团也展示了采用线控操纵的Green-i概念车(见图4(b))。这些高校和机构在控制策略,应用软件方面如随速助力、主动回正、阻尼控制、齿条末端保护等方面有一定的尝试,但性能参差不齐,距离真正的实际应用还有很长的路要走,而整车厂及零部件企业对线控转向系统的研究报道则很少,说明国内企业对线控转向方面还缺乏认识或前瞻性考虑。
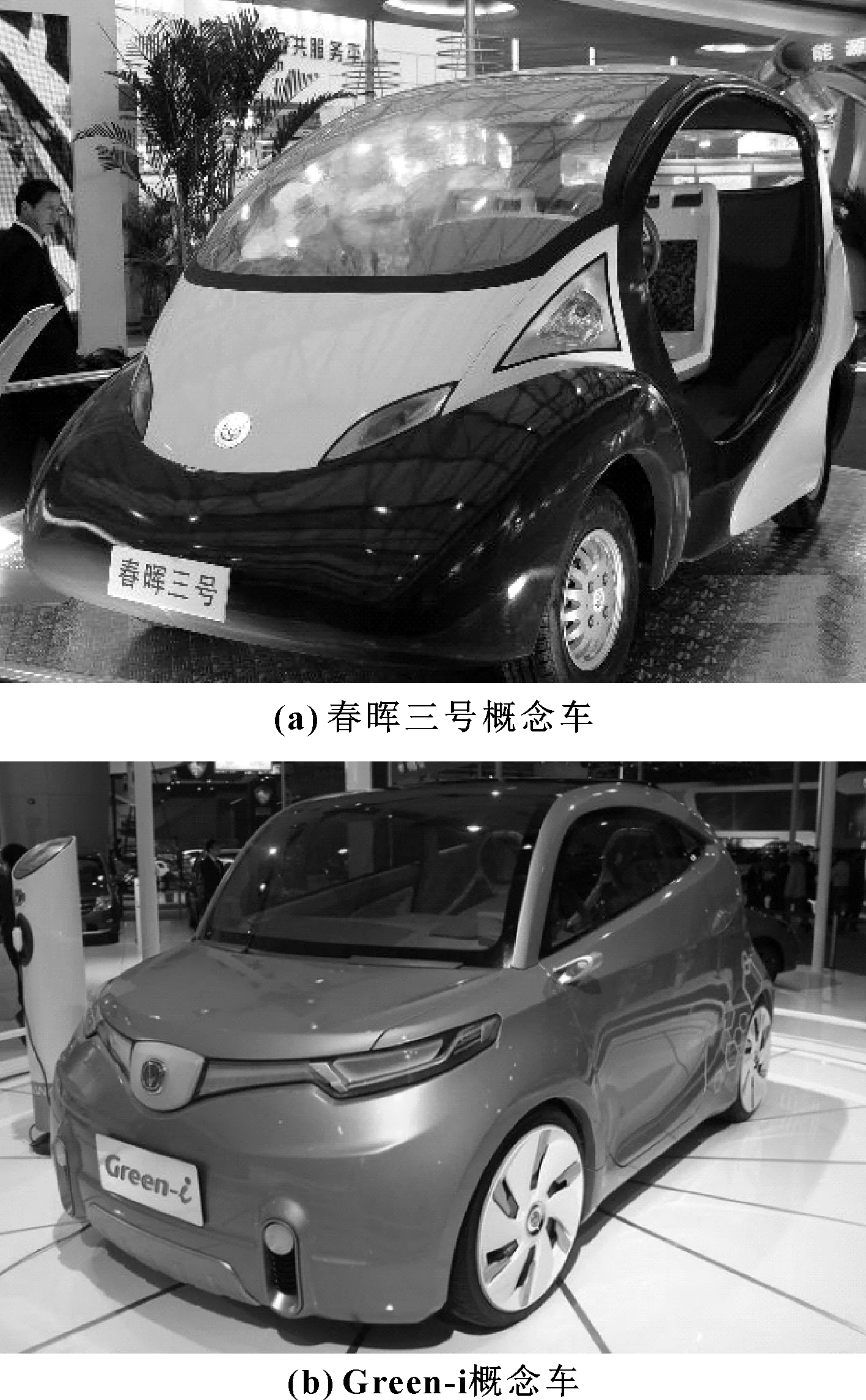
图4 春晖三号和Green-i概念车
4 专利统计
通过分析近20年来关于SBW方面的专利在我国的申请情况,可以对SBW的发展状况也有一个大致了解。图5为不同国家/地区申请人在我国申请的关于SBW专利数量趋势图,可以看到SBW方面的专利申请量是逐年呈现上升趋势的,其技术生长率持续增长说明该技术处于生长阶段,且日本、美国、德国企业在中国申请线控转向专利量逐年增多,说明已看好此技术在中国的未来前景。
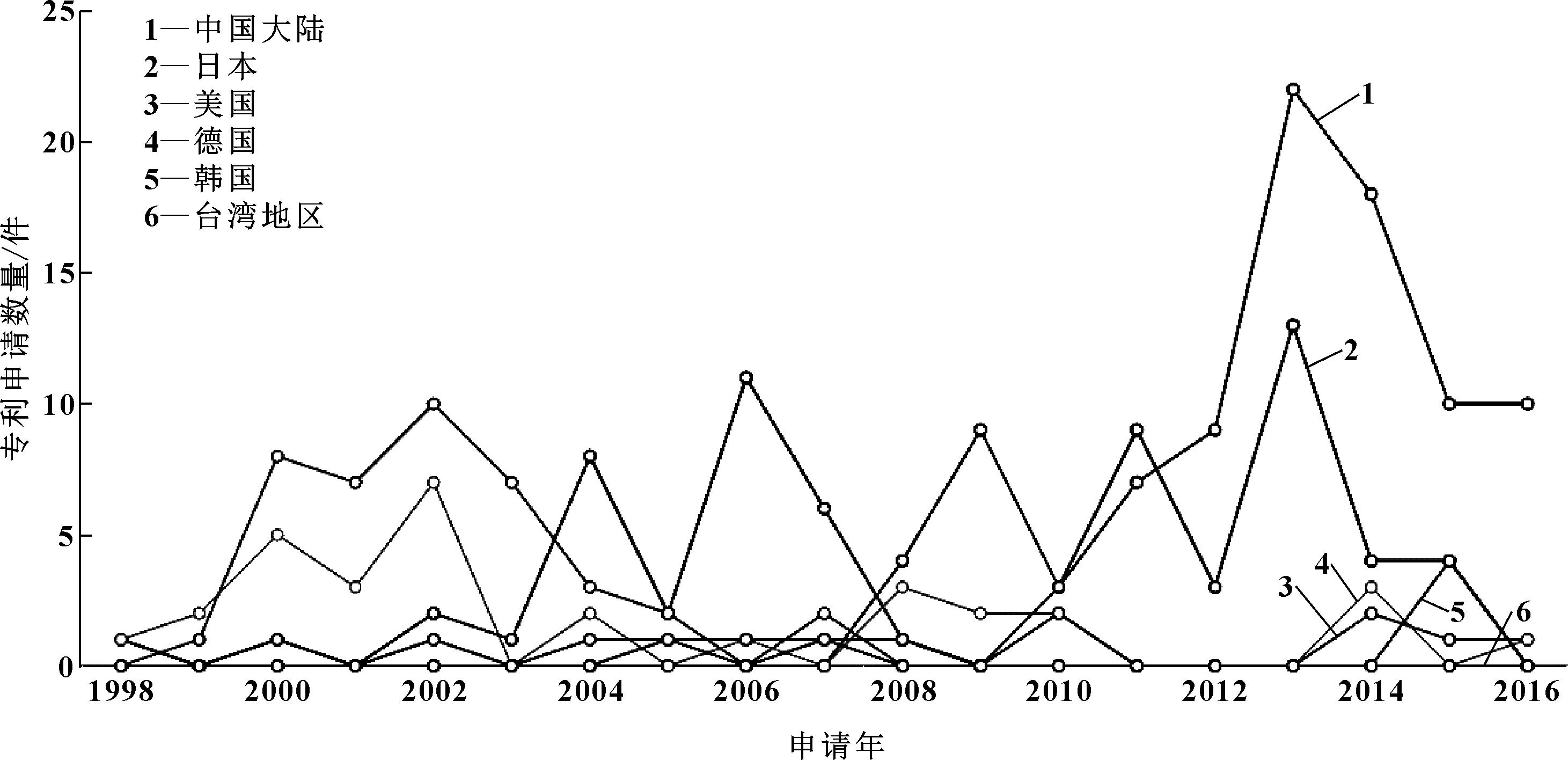
图5 不同国家/地区申请人在我国申请的关于SBW专利数量趋势图
下面对申请人分布情况也作一个分析。参见图6,可以看到中国申请的线控专利主要还是在大学和科研院所,申请人分布很集中,国内企业研发线控转线技术的并不多,其他在中国申请线控转向专利的主要是国外企业,如NTN、NISSAN、JTEKT、DELPHI、ZF、BOSCH、TRW等,这些企业是线控转向行业的主要竞争对手。
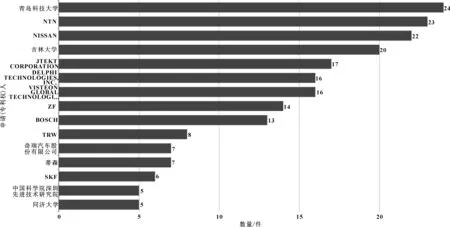
图6 申请人分布情况
通过统计申请专利的技术分布来看,专利主要集中在B62D5/04使用伺服电动机与转向器连接或构成转向器的零件这方面,其次是B62D6/00 根据所检测和响应行驶条件自动控制转向的装置。
5 发展前景
目前随着EPS在我国汽车上的逐渐普及及智能驾驶相关技术的研发不断投入,未来性能更优越的SBW开发与使用也成了必然,并将会成为未来智能技术中举足轻重的一个重要环节。现在SBW还有很多关键难点亟待解决。比如安全性方面,由于电子部件还没有达到机械部件那样的可靠程度,如何保证在电子部件出现故障后,系统仍能实现基本的转向功能,这在实际应用中十分重要[23]。再比如成本方面,例如,由于对电子部件可靠性的担忧,目前的有些SBW为了解决安全问题还保留了机械部件如离合器来进行安全防护,该离合器将SBW分为上、下两个部分,在正常转向时离合器是分开的,一旦检测到某些故障,离合器会将上、下两部分连接成传统的机械系统,以确保驾驶员仍能操纵转向,这种为了满足安全需求的冗余设计造成了成本的增加,也是阻碍SBW市场化的一个主要因素。虽然有这些难点摆在面前,还需要深入研究和大量的验证,但相信随着技术的发展,比如电子元件和芯片成本降低、可靠性和处理能力大大提高,这就为未来更多的消费者提供了低成本的便利[24-25]。一旦突破这些瓶颈,SBW一定会得到井喷式的发展与使用。文中第2节也提到了,SBW会在诸多场合提供支持,这符合汽车将在“新四化”方向上发展的大势,因此SBW在未来将会有良好的商业化和产业化的市场前景,将是提升自主品牌技术含量的一次机遇与挑战,是打破国外技术垄断的一个新的突破点。
[1]HARTER W,PFEIFFER W,DOMINKE P,el al.Future Electrical Steering System:Realizations with Safety Requirements[R].SAE Paper No.2000-01-0822.
[2]孙玉华.线控转向系统的设计及其特性的研究[D].成都:西华大学,2009.
[3]于蕾艳,林逸,施国标.线控转向系统路感控制策略的研究[J].计算机仿真,2008,25(6):248-250.
YU L Y,LIN Y,SHI G B.Research on Road Feel Control Strategy of Steer-by-ire System[J].Computer Simulation,2008,25(6):248-250.
[4]YAO Y,STOUT G J.System and Method of Controlling Vehicle Steer-by-wire Systems:US 6,694,239 B1[P].2004.
[5]ASAI S,KUROYANAGI H,TAKEUCHI S,et al.Development of Steer-by-wire System with Force Feedback Using a Disturbance Observer[R].SAE Paper No.2004-01-1100.
[6]左建令.汽车电子转向系统控制方法研究[D].长春:吉林大学, 2005.
[7]ONO E,HOSOE S,TUAN H D,et al.Robust Stabilization of Vehicle Dynamics by Active Front Wheel Steering Control[C]//IEEE Conference on Decision amp; Control,1996:1777-1782.
[8]何仁,李强.汽车线控转向技术的现状与发展趋势[J].交通运输工程学报,2005,5(2):68-72.
HE R,LI Q.Current Status and Development Tendency of Automobile Steer-by-wire System[J].Journal of Traffic and Transportation Engineering,2005,5(2):68-72.
[9]陈善华,魏宏,李文辉,等.汽车电子转向技术发展与展望[J].汽车技术,2003(1):1-7.
CHEN S H,WEI H,LI W H,et al.Development and Forecast of Automotive Electronic Steering Technology[J].Automobile Technology,2003(1):1-7.
[10]喻凡,林逸.汽车系统动力学[M].2版.北京:机械工业出版社,2016.
[11]于蕾艳,林逸,李玉芳.汽车线控转向系统综述[J].农业装备与车辆工程,2006(1):32-36.
YU L Y,LIN Y,LI Y F.Summarization of Automobile Steer-by-Wire System[J].Agricultural Equipment amp; Vehicle Engineering,2006(1):32-36.
[12]陈祯福.汽车底盘技术发展[R].长春:吉林大学邀请报告,2008.
[13]PARK Y,JUNG I.Semi-active Steering Wheel for Steer-by-wire System[R].SAE Paper No.2001-01-3306.
[14]HAYAMA R,NISHIZAKI K,NAKANO S,et al.The Vehicle Stability Control Responsibility Improvement Using Steer-by-Wire[C]//IEEE Intelligent Vehicles Symposium,2000:596-601.
[15]SEGAWA M,KIMURA S,KARA T,et al.A Study of the Relationship between Vehicle Behavior and Steering Wheel Torque on Steer By Wire Vehicles[R].Extensive Summaries of 18th IAVSD Symposium on Dynamics of Vehicles on Roads and Tracks,2003:67-69.
[16]石晶,王冠一,李刚,等.基于CarSim的线控转向汽车建模与仿真研究[J].辽宁工业大学学报(自然科学版),2015(1):41-44.
SHI J,WANG G Y,LI G,et al.Modeling and Simulation of Steering-by-wire Vehicle Based on CarSim[J].Journal of Liaoning Institute of Technology(Natural Science Edition),2015(1):41-44.
[17]郑宏宇.汽车线控转向路感模拟与主动转向控制策略研究[D].长春:吉林大学,2009.
[18]KASSELMANN J,KERANEN T.Adaptive Steering[J].Bendix Technical Journal,1969,8(2):26-35.
[19]杨文兴,杨俊智,周强.汽车线控转向系统的现状及关键技术研究[J].机械制造,2013,51(9):79-81.
[20]ALITA T.User Benefits of Active Steering Control System:Steering-by-Wire[R].99SF013.
[21]田杰.汽车线控转向系统动力学分析与控制方法研究[D].镇江:江苏大学,2011.
[22]陈小兵.汽车线控转向主动转向控制策略与路感模拟研究[D].武汉:武汉科技大学,2013.
[23]宗长富,麦莉,郭学立.汽车前轮电子转向系统[J].中国机械工程,2004,15(11):1022-1026.
ZONH C F,MAI L,GUO X L.Steering-by-Wire System for Automobile[J].China Mechanical Engineering,2004,15(11):1022-1026.
[24]王一斐.汽车线控转向系统的关键技术及发展前景[J].移动电源与车辆,2014(1):30-32.
WANG Y F.Key Technology and Development Prospects of Automotive By-wire Steering System[J].Movable Power Station amp; Vehicle,2014(1):30-32.
[25]贾和平,钟绍华.汽车线控转向系统的研究[J].上海汽车,2006(11):39-43.
JIA H P,ZHONG S H.Research on Automotive Steer-by-Wire System[J].Shanghai Auto,2006(11):39-43.
ApplicationofSteer-by-WireTechnologyinAutomobileFieldatDomesticandAbroad
MENG Yonggang,LUO Laijun,LUO Yi, WANG Jun,LI Yongchen
(DIAS Automotive Electronic Systems Co., Ltd.,Shanghai 201206,China)
With the study and popularization of new energy vehicles and driverless vehicles, a new type of power steering system the steer-by-wire (SBW) comes into being.In the system,the mechanical connection between the steering wheel and the steering wheel is eliminated, then all the flaws of traditional steering systems are solved.The basic components and working principle of the SBW were introduced.Compared with electric power steering system,the advantages of the SBW were illustrated. The current development situations of the SBW at domestic and abroad were summarized.The patent application situation of the SBW in China was analyzed. The application prospect and development trend of the SBW were prospected.
Steer-by-wire technology;Current development situations; Development tendency
U463.2
A
1674-1986(2017)11-075-05
10.19466/j.cnki.1674-1986.2017.11.019
2017-06-27
孟永刚,男,本科,主要从事电动助力转向、线控转向方面的开发工作。E-mail:mengyonggang@dias.com.cn。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
环球时报(2022-03-09)2022-03-09
汽车实用技术(2022年4期)2022-03-07
汽车之友(2021年23期)2021-12-24
汽车工程师(2018年3期)2018-07-12
小太阳画报(2018年3期)2018-05-14
阅读与作文(小学低年级版)(2016年12期)2016-12-22
中学科技(2015年11期)2015-11-25
企业技术开发·中旬刊(2014年7期)2014-09-23
