
基于MPSO-BP神经网络方法的人体步态识别
2017-11-28 09:50:50骆敏舟王玉成赵汉宾
中成药 2017年11期
孙 楠 ,骆敏舟,王玉成,赵汉宾
1.常州大学 机械工程学院,江苏 常州 213164 2.中国科学院 合肥物质科学研究院 先进制造技术研究所,江苏 常州 213164
◎模式识别与人工智能◎
基于MPSO-BP神经网络方法的人体步态识别
孙 楠1,2,骆敏舟2,王玉成2,赵汉宾2
1.常州大学 机械工程学院,江苏 常州 213164 2.中国科学院 合肥物质科学研究院 先进制造技术研究所,江苏 常州 213164
为提高人体下肢步态相位识别准确率以实现外骨骼机器人控制,采用一种改进的粒子群优化MPSO-BP神经网络方法识别不同运动模式下的人体步态相位。通过自适应调整学习因子构造MPSO-BP神经网络分类器,以多种传感信息组成的特征向量样本集训练神经网络分类器,用于识别人体下肢在平地行走、上楼梯和起坐三种典型运动模式下的步态相位。实验结果表明,MPSO-BP神经网络分类器能有效识别三种不同运动模式的步态相位,识别准确率均达到96%以上,识别性能优于传统的BP神经网络模型和粒子群优化神经网络模型。
步态识别;步态相位;神经网络;粒子群算法
1 引言
步态相位识别是实现人体运动意图识别进而实现外骨骼机器人控制的关键技术之一[1]。目前国内外运动意图识别方法主要是基于视频图像分析或多传感器信息融合分析,多采用隐马尔科夫、神经网络等模式识别方法识别步态相位。基于视频图像的步态识别方法主要是通过拍摄受试者行走图像,抽取图像中人体运动特征信息,进而识别步态类型[2]。基于多传感器信息融合的方法是通过直接测量受试者肢体特定部位的运动数据,如足底压力信号、关节角度信号等[3],利用模式识别技术划分步态相位。
2005年,Kawamoto[4]研究小组通过安装在足底的空气压力开关、大腿前侧的肌电传感器和膝关节、髋关节的角度传感器采集信号,利用阈值法判断各步态相位,取得较好效果。但是所采用的肌电传感器由于直接粘贴在皮肤上,存在固定、穿戴不易和易受人体出汗影响等问题。2009年,Bae[5]等人通过在鞋底安装四个力传感器来检测受试者行走时的脚底压力数据,采用模糊逻辑方法判断各步态相位区间,但识别精度不高。2012年,Rossi[6]等人采用隐马尔科夫(HMM)模型根据足底压力信号识别人体行走步态相位。该方法基于经典统计学,当训练样本数目越大时其识别准确率越高,然而在实际应用中,训练样本的数量往往是有限的,从而限制了HMM方法识别准确率的提高空间。BP(Back Propagation)神经网络模型在步态相位识别领域也获得较多应用[1,7-8],但是BP算法存在收敛速度慢、容易陷入局部极小和泛化能力差的缺点[7-8]。为提高BP算法的收敛速度并解决局部极小问题,马玉良[7]等采用遗传算法优化BP神经网络用于识别下肢5个步态,有效提高了识别精度。刘磊[8]等提出一种基于多源信息和粒子群优化-误差反向传播(PSO-BP)算法用于改善神经网络训练的收敛速度问题,该方法对下肢不同步态的识别率为95.75%,识别准确率仍有提高的空间。
针对目前有限样本空间中步态相位识别率依然不足的问题,本文采用改进的粒子群算法(Modified Particle Swarm Optimization,MPSO)优化后的人工神经网络模型识别三类常见运动模式的步态相位。MPSO算法是一种有效的全局寻优算法,能够克服BP神经网络的缺点,与传统的进化算法相比操作简单,避免了复杂的遗传操作[9-13]。实验中通过设计三层BP神经网络模型,以MPSO算法在多源传感数据样本集上确定模型连接权值和阈值,之后将训练好的MPSO-BP神经网络用于正常行走、上楼梯和起坐三类运动模式的步态相位识别,最后在测试集上对MPSO算法的收敛速度和识别准确率进行了分析,并同现有方法做了比较。
2 MPSO-BP神经网络方法原理与实现
2.1 粒子群算法
粒子群(PSO)是一种有效的全局寻优算法,与传统的进化算法相比,PSO采用速度-位移模型,结构简单,避免了复杂的遗传操作[11]。该算法通过个体间的协作与竞争,实现复杂空间的最优解搜索。假设在D维空间,有m个粒子组成一个群落,每个粒子所处的位置为xi=(xi1,xi2,…,xiD),速度为 νi=(νi1,νi2,…,νiD)。粒子通过不断调整自己的位置来搜索新解,每个粒子都能记住自己搜索到的最优解 pbest和整个粒子群到目前为止经历过的最优解gbest,然后按公式(1)和公式(2)来更新:

式中,i=1,2,…,m,d=1,2,…,D,ω为惯性因子,体现的是粒子当前速度多大程度上继承先前的速度。c1和c2为学习因子,ε表示[0,1]之间的随机数。由于PSO中粒子都向最佳位置聚集,会形成粒子种群的快速趋同效应,容易陷入局部最优和过早收敛现象[11-12]。
2.2 改进的粒子群算法

式中,ωmax和ωmin分别表示初始和最终惯性权重,iter和itermax表示当前迭代次数和最大迭代次数。学习因子的大小决定了粒子自我认知和社会认知对粒子的影响,为了防止陷入局部最优,可以通过动态地改变c1和c2来保持粒子始终具有多样性。优化后的算法在初期使粒子具有大的自我认识(大的c1)和小的社会认知(小的c2),便于快速搜索;在算法后期,应有小的自我认知(小的c1)和大的社会认知(大的c2),加快算法收敛和在全局范围内寻找最优解。对此有如下改进:

为了克服上述不足,通过分析惯性权重和学习因子对粒子群算法性能的影响,分别对二者做出改进。研究发现ω较大时利于全局搜索,ω较小时利于局部搜索,故采取线性递减惯性权重:
其中,cst和cend分别为c1的初始值和最终值。
MPSO算法根据神经网络的拓扑结构确定粒子维数,粒子群中每个粒子的维度分量都对应神经网络中的连接权值或阈值。以输出误差作为神经网络训练的适应度函数,误差越小表示粒子在搜索中具有更好的性能。最终算法停止时,适应度最高的粒子成为问题的最优解。具体实现流程如图1所示。
2.3 MPSO-BP神经网络设计

式中,m,n,l分别为隐含层、输入层、输出层神经元数目,常数α取值范围为1~10。设置神经网络训练最大迭代次数为1 000,误差目标为10-5。粒子群维数即BP神经网络初始权值与阈值之和为50;设置粒子种群数目为40;粒子群迭代次数为 200;ωmax=0.95,ωmin=0.25 ;c1=3,c2=1。
本文设计三层神经网络,输入端神经元为8个,输出端为1个,隐含层神经元个数根据经验公式(6)以及实际测试结果确定神经元个数为5。

图1MPSO-BP算法流程
3 多传感器运动信号采集系统
足底与地面的接触力变化是描述和识别下肢运动状态的重要信息[14],实验中选用Flexiforce系列A401薄膜压阻型传感器,能承受的最大峰值压力范围为15.5 kg/cm2,厚度仅为0.208 mm,可以反复弯曲,线性误差小于±3%。压力传感器在足底的安装位置如图2所示。

图2 足底压力传感器位置
髋关节和膝关节处安装了磁旋转编码器(AS5045)来进行关节角度测量,如图3所示。受试者穿上该信号采集系统适应一段时间后,分别在不同运动模式下重复采集数据。在平地行走实验中,为了保证每组实验都以相同速度进行,受试者在跑步机上按设定速度值3 km/h行走。上楼和起坐实验中受试者尽量保持每次都以正常速度完成实验。

图3 关节角度传感器位置
4 步态相位识别实验结果
本实验主要研究正常平地行走、上楼梯和起坐动作的步态相位识别。对MPSO-BP神经网络进行训练,以平地行走为例,从10名实验对象(6名男生,4名女生)采集的100组有效实验数据中随机取40组作为训练样本,60组为测试样本。
4.1 平地行走相位分析
相对于人体的上肢运动,下肢运动更具有重复性和规律性。从两个腿的运动分析来看,自然行走时一个完整的步态周期可以划分为两个阶段:单足支撑相和双足支撑相。行走是一个左右交替的过程,遂将行走划分为四个相位Phase1~4,分别为:右单腿支撑、左双腿支撑、左单腿支撑和右双腿支撑。根据以上相位划分标准,以足底前三个传感器测量值之和表示足底前部在行走过程中的压力变化,以足跟压力传感器测量值表示足跟在行走过程中的压力变化,与髋关节和膝关节角度值共同组成8维特征向量,应用MPSO-BP神经网络模型识别步态相位,识别结果的一组实例如图4所示。

图4 行走步态相位划分
4.2 上楼梯步态相位分析
将上楼梯分为4个不同的状态分别为:Phase1,抬左脚向上跨步;Phase2,双脚支撑且重心转到左脚;Phase3,抬右脚向上跨步;Phase4,双脚支撑,重心移到右脚。应用MPSO-BP神经网络模型以髋、膝关节和足底地面接触力变化曲线为特征向量实现对上楼梯步态的相位划分,如图5所示。因为在上楼梯过程中习惯于足底整体落地,所以放置于足底的压力传感器变化曲线先后顺序不明显,故将单足脚底四个传感器压力之和作为足底压力在上楼梯过程中变化规律的测量值。
4.3 起坐相位分析
通过多次测量人体关节角度和地面反作用力变化,将人体站起过程分为3个阶段:第一阶段(Phase1)为坐姿保持阶段,足底压力几乎为零,髋、膝关节角度保持不变;第二阶段(Phase2)为起立初始阶段,身体前倾,产生向前、向上推力,此时伴随着足跟(Rear)压力增大,膝关节角度持续变小;第三阶段(Phase3)为离开座椅阶段,直到髋、膝关节角度值最大,站起过程中身体离开座椅后重心向前,使足底前部压力不断变大而后跟反而减小;第四阶段(Phase4)为上升阶段,身体完全直立处于平衡状态[15]。MPSO-BP神经网络模型对起坐状态的相位识别结果如图6所示。由于人在站立时会有重心小幅度变化,故在直立时足底压力会有波动。
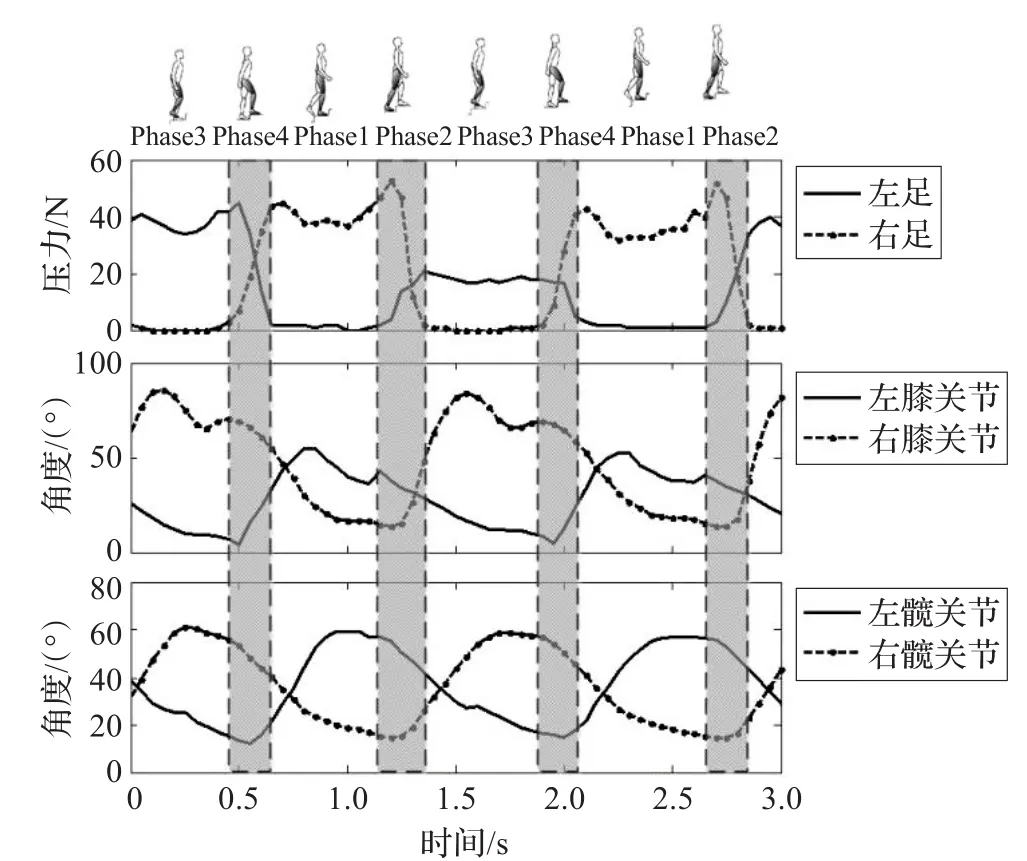
图5 上楼梯步态相位划分

图6 起坐相位划分
4.4 与其他识别算法的性能比较
利用大量实验数据对相同结构的BP、PSO-BP神经网络进行训练,与MPSO-BP神经网络模型识别性能进行比较。各神经网络训练收敛曲线分别如图7所示,图8为PSO、MPSO算法迭代收敛曲线,各算法训练性能比较结果见表1。针对平地行走下三类算法步态相位识别准确率见表2。表3为不同步态模式下的识别准确率。

图7 BP、PSO-BP和MPSO-BP网络训练误差曲线

表1 三类算法训练性能结果比较

表2 三类算法识别平地行走步态相位的准确率%
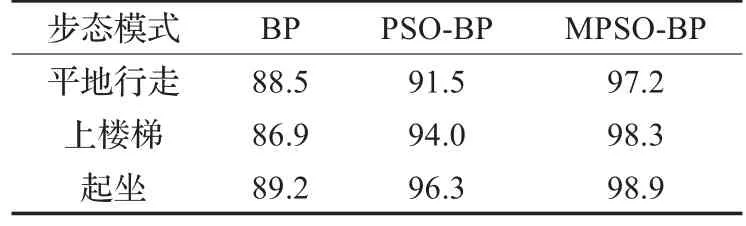
表3 不同步态模式下识别准确率%
经过改进的粒子群优化BP神经网络的收敛速度和识别精度有明显提高,MPSO-BP神经网络改善了PSO-BP神经网络收敛过慢和容易陷入局部极小值的缺点,提高了精度。由表2、3所示实验结果可以看出,针对平地行走、上楼梯和起坐模式下各传感器信息,MPSO-BP神经网络模型经测试计算获得最终识别准确率分别为97.2%、98.3%和98.9%,高于BP和PSO-BP神经网络模型的识别结果。
5 结语
由于传统的BP算法和粒子群算法容易陷入局部最优解,导致识别准确率不高,本文利用改进的粒子群优化神经网络权值和阈值,将优化后的初始值代入神经网络中进行训练,加快学习速率、克服陷入局部最优的情况,同时提高识别准确率。通过平地行走、上楼梯和起坐三种不同人体运动模式的实验,验证了该方法的有效性,为可穿戴下肢外骨骼机器人提供正确控制信号打下基础。本文实验所得的准确率是基于10名测试者所得数据,后期会增加测试者人数,采集更多样本训练神经网络,以提高网络模型鲁棒性和识别准确率。
[1]夏懿.基于足底压力分布的步行行为感知关键技术研究[D].合肥:中国科学技术大学,2013.
[2]薛召军,靳静娜,明东,等.步态识别研究现状与进展[J].生物医学工程学杂志,2008,25(5):1217-1221.
[3]沈金虎.基于全方向下肢康复训练机器人的步态检测与分析[D].沈阳:沈阳工业大学,2012.
[4]Kawamoto H,Sankai Y.Power assist method based on phase sequence and muscle force condition for HAL[J].Advanced Robotics,2005,19(7):717-734.
[5]Bae J,Kong K,Byl N,et al.A mobile gait monitoring system for gait analysis[C]//International Conference on Rehabilitation Robotics,USA,2009:73-79.
[6]Rossi S M M,Crea S,Donati M,et al.Gait segmentation using bipedal foot pressure patterns[C]//The Fourth IEEE RAS/EMBS InternationalConferenceonBiomedical Robotics and Biomechatronics,Roman,Italy,2012.
[7]马玉良,马云鹏,张启忠,等.GA-BP神经网络在下肢运动步态识别中的应用研究[J].传感技术学报,2013,26(9):1183-1187.
[8]刘磊,杨鹏,刘作军.基于多源信息和粒子群优化算法的下肢运动模式识别[J].浙江大学学报:工学版,2015,49(3):439-447.
[9]Khan S U,Yang S,Wang L,et al.A modified particle swarm optimization algorithm for global optimizations of inverse problems[J].IEEE Transactions on Magnetics,2016,52(3):1-4.
[10]刘渊,李群,王晓锋.基于攻击图和改进粒子群算法的网络防御策略[J].计算机工程与应用,2016,52(8):120-124.
[11]Ling S H,Iu H,Leung F H F,et al.Improved hybrid particle swarm optimized wavelet neural network for modeling the development of fluid dispensing for electronic packing[J].IEEE Transactions on Industrial Electronics,2008,55(9):3447-3460.
[12]雷瑞龙,侯立刚,曹江涛.基于多策略的多目标粒子群优化算法[J].计算机工程与应用,2016,52(8):19-24.
[13]Clerc M,Kennedy J.The particle swarm-explosion,stability,and convergence in a multidimensional complex space[J].IEEE Transactions on Evolutionary Computation,2002,6(1):58-73.
[14]郑成闻,宋全军,佟丽娜,等.一种柔性双足压力检测装置与步态分析系统设计研究[J].传感技术学报,2010,23(12):1704-1708.
[15]白大鹏,张立勋.助行机器人起坐机构运动分析及实验[J].机器人,2013,35(6):757-761.
SUN Nan1,2,LUO Minzhou2,WANG Yucheng2,ZHAO Hanbin2
1.School of Mechanical Engineering,Changzhou University,Changzhou,Jiangsu 213164,China 2.Institute of Advanced Manufacturing Technology,Hefei Institute of Physical Sciences,Chinese Academy of Sciences,Changzhou,Jiangsu 213164,China
Human gait recognition based on MPSO-BP neural network method.Computer Engineering and Applications,2017,53(21):121-125.
To improve the accuracy rate of human gait phase recognition for controlling the exoskeleton robot,an approach based on Modified Particle Swarm Optimization algorithm-Back Propagation(MPSO-BP)neural network is utilized to divide three types of gait into different phases.Firstly,the MPSO-BP neural network classifier is constructed through regulating the learning factor adaptively,and then the classifier is trained using sample set containing multisensor information.Secondly,test the classifier on gait phase recognition in three types of human gait including walk,upstairs and sit-down.The experimental results show that the MPSO-BP neural network classifier can successfully increase the accuracy rate up to averaged 96%above,which is superior to the BP neural network and the particle swarm optimization BP neural network methods.
gait recognition;gait phase;neural network;particle swarm optimization
A
TP242.6
10.3778/j.issn.1002-8331.1605-0090
中国科学院合肥物质科学研究院院长基金(No.YZJJ201521);常州市科技支撑计划(No.CE20140025)。
孙楠(1991—),女,硕士研究生,主要研究领域为仿生机器人、模式识别;骆敏舟(1973—),男,博士,研究员,主要研究领域为类人机器人、智能机械;王玉成(1980—),男,博士,助理研究员,主要研究领域为模式识别、生物医学信号处理,E-mail:ziichuan@163.com;赵汉宾(1982—),男,工程师,主要研究领域为数字电路设计。
2016-05-10
2016-09-13
1002-8331(2017)21-0121-05
CNKI网络优先出版:2016-12-02,http://www.cnki.net/kcms/detail/11.2127.TP.20161202.1503.054.html
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
健康之家(2021年19期)2021-05-23 11:17:39
医学食疗与健康(2021年27期)2021-05-13 18:46:23
农业科技与信息(2021年2期)2021-03-27 07:27:38
测控技术(2018年10期)2018-11-25 09:35:54
电子制作(2018年18期)2018-11-14 01:48:04
中国交通信息化(2018年5期)2018-08-21 03:37:40
自动化学报(2018年6期)2018-07-23 02:55:42
浙江工业大学学报(2017年5期)2018-01-22 02:03:46
发明与创新(2015年33期)2015-02-27 10:40:00
