
单轴旋转惯导系统加速度计零偏误差静基座标定滤波算法∗
2017-11-28 01:57:57尹伟伟李方能
舰船电子工程 2017年10期
尹伟伟 李方能
(1.中国人民解放军902厂 上海 200030)(2.海军工程大学导航工程系 武汉 430033)
单轴旋转惯导系统加速度计零偏误差静基座标定滤波算法∗
尹伟伟1李方能2
(1.中国人民解放军902厂 上海 200030)(2.海军工程大学导航工程系 武汉 430033)
旋转调制工作模式下,加速度计零偏误差导致惯导系统姿态误差呈周期性变化,影响船用惯导系统姿态精度。为原位标定加速度计零偏误差,根据姿态角误差法推导了滤波方程,在驻排条件下可以准确估计加速度计零偏,明显降低姿态误差。实测数据表明,滤波算法驻排条件下姿态精度为0.15角分。
单轴旋转;标定;加速度计零偏;原位
1 引言
与其他应用领域的惯导系统相比,船用惯导系统的特点是连续工作时间长,导航精度要求高。为了满足舰船导航高精度长航时的自主性和隐蔽性的需求,提高惯导系统长航时精度成为国内外研究热点。国外一方面研制新型惯性元件提高现有惯性器件精度,另一方面于20世纪60年代开辟了另一条技术途径,基于现有陀螺的精度,采用旋转调制技术使惯导系统获得较高的精度[3]。20世纪90年代,Sperry公司先后研制出MK39型和AN∕WSN-7船用旋转激光陀螺惯导系统,成为美国水面舰艇和各级攻击潜艇的标准设备。由于旋转调制技术研究较晚,国内还没有旋转激光陀螺惯导系统的船用报道。旋转惯导系统误差标校相关研究成果主要集中于原理的分析和仿真[4~10]。
单轴旋转惯导系统绕方位轴旋转,加速度计零偏误差随旋转投影到导航系,导致姿态误差呈周期性变化。高精度误差标校通常需要进船坞,在驻排状态下实施或将惯导拆卸使用转台等测试设备标校,标校过程复杂且耗时,对标校环境和操作人员素质的要求都比较高。论文提出一种加速度计零偏误差原位标定滤波算法,可以在驻排条件下准确标定标定加速度计零偏误差,有效降低旋转惯导系统姿态误差,满足船用惯导系统现场标定的需求。
2 标定滤波算法
选取东-北-天(ENU)地理坐标系为导航坐标系n,定义惯导系统旋转机构坐标系为p系,转动零位置的p系为 p0系,p系相对 p0系的旋转角为α(t)。惯导系统体坐标为b系,b系相对真北方向的当前方位角为φ。γ、θ为船体横摇角和纵摇角。
Ψ角误差模型的速度误差方程为[3]
忽略地球自转角速度、导航系转动角速度以及重力矢量测量值差异。在驻排状态下,船体速度为零。在系泊状态下,船体速度很小,忽略两套系统速度测量值差异。则式可以简化为
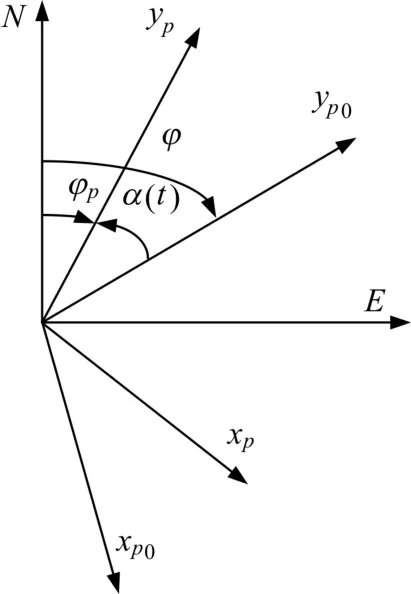
图1 旋转方位角、方位角与平台转动角间的关系

3 实验验证
如图2所示,在驻排状态惯导系统监控仪显示姿态角原始误差(峰峰值)为12角分。根据论文提出的滤波算法编写标定软件,可以得到加速度计x轴和y轴零位估计曲线,分别如图3和图4所示。
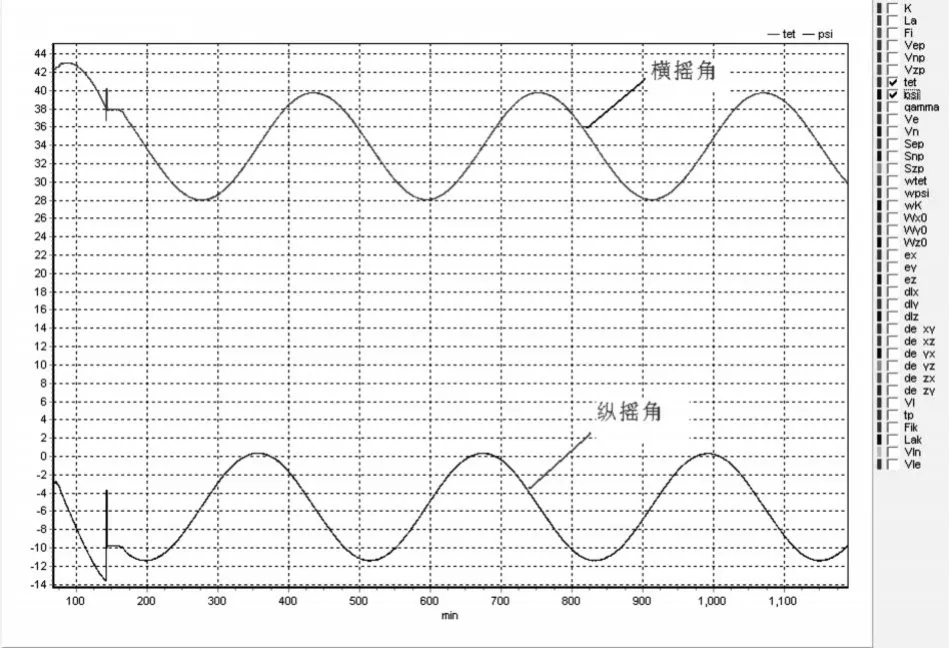
图2 驻排状态姿态实测曲线

图3 加速度计x轴零位曲线
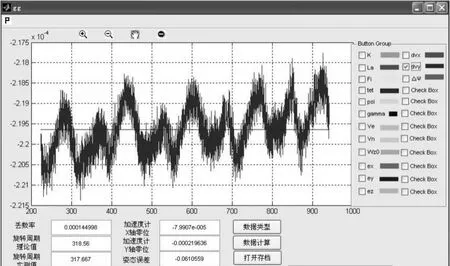
图4 加速度计y轴零位曲线
加速度计软件标定结果:-7.9907e-5,-2.1964e-4。加速度计零偏误差标校后,姿态误差由12角分提高至0.15角分(峰峰值)。
4 结语
1)论文提出的滤波算法能够实现原位标校,实测数据表明满足现场标校的需要。
2)滤波算法在驻排状态可以准确估计加速度计零偏误差,有效降低姿态误差。
[1]张伦东.船用激光陀螺惯导系统旋转调制与误差标校技术研究[D].长沙:国防科技大学,2013:8-12.
[2]Jizhou Lai,Ling Zhang,Jianye Liu,et al.Improved environmentfunction to separate andcompensate the errors in rotating SINS[J]. 中国惯性技术学报,2013,21(1):16-21.
[3]高钟毓.惯性导航系统技术[M].北京:清华大学出版社,2012:11-15.
[4]许江宁,查峰,李京书,等.单轴旋转惯导系统“航向耦合效应”分析与补偿[J].中国惯性技术学报,2013,21(1):26-30.
[5]查峰,许江宁,黄寨华,等.单轴旋转惯导系统旋转性误差分析及补偿[J]. 中国惯性技术学报,2012,20(1):11-17.
[6]赖际舟,吕品,张玲,等.旋转惯导系统中的圆锥误差分析及其补偿[J].南京航空航天大学学报,2012,44(2):159-164.
[7]Xudong Yu,Yu Wang,Guo Wei,et al.NovelTemperature modeling and compensation method for bias of ring laser gyroscopebased on LS-SVM[J].Chinese Optics Letters,2011,9(5):05-12.
[8]袁保伦,饶谷音,廖丹.旋转式惯导系统的标度因数误差效应分析[J]. 中国惯性技术学报,2010,18(2):160-164.
[9]于旭东,王宇,张鹏飞,等.单轴旋转惯导系统在晃动基座上的建模及误差分析[J].传感技术学报,2009,22(2):289-292.
[10]陈永冰,钟斌.惯性导航原理[M].北京:国防工业出版社,2007:1-5.
Accelerometer Bias Error Calibration Filter Algorithm for INS with Single Axis Rotation
YIN Weiwei1LI Fangneng2
(1.Chinese PLA 902 Factory,Shanghai 200030)
(2.College of Electrical Engineering,Naval University of Engineering,Wuhan 430033)
Due to the azimuth rotation,the attitude error is modulated into a sine or cosine signal.The platform tilt-angle is caused by the accelerometer bias residual error in levelling loop.The roll and pitch are typical sine or cosine signal in static status.In order to calibrate accelerometer bias error in situ,the project utilizes attitude error,and proposes accelerometer bias error calibration algorithm of inertial navigation system.The effectiveness of proposed algorithm is verified and evaluated understatic conditions.The experimental results shows attitude error can be reduced to 0.15 arc-min.
single axis rotation,calibration,accelerometer bias error,in situ
U666.1
10.3969∕j.issn.1672-9730.2017.10.010
Class Number U666.1
2017年4月4日,
2017年5月25日
国家自然科学基金(编号:41274013)资助。
尹伟伟,男,硕士,高级工程师,研究方向:导航技术。李方能,男,博士,副教授,研究方向:导航技术。
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06 05:09:08
科学技术创新(2021年11期)2021-05-25 10:04:18
电子制作(2019年7期)2019-04-25 13:17:42
测控技术(2018年2期)2018-12-09 09:00:56
宇航计测技术(2018年3期)2018-09-08 02:21:32
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41
计算机工程(2015年4期)2015-07-05 08:28:57
