
基于CUDA的导航雷达P显多要素显示技术∗
2017-11-28 01:58嵇亮亮
舰船电子工程 2017年10期
徐 勇 嵇亮亮
(中国电子科技集团公司第二十八研究所 南京 210007)
基于CUDA的导航雷达P显多要素显示技术∗
徐 勇 嵇亮亮
(中国电子科技集团公司第二十八研究所 南京 210007)
鉴于导航雷达视频P显显示需求不断提高,论文提出了一种基于CUDA的P显多要素显示方式,通过此方式,可以将雷达视频、电子海图以及ARPA信息进行叠加显示,并具有较强的显示灵活性;此外,论文采用了“分层绘制”和“整体更新”的机制,按需更新P显显示内容,降低了其更新频率,提高了P显绘制的效率,文章最后给出了应用效果。
导航雷达;电子海图;P显显示;ARPA;并行处理;软件化显示
1 引言
船用导航雷达的主要作用是用于保障船舶的航行安全,尤其是在能见度低的雾天、雨天以及黑夜等情况下,其作用更为突出,通常情况下,导航雷达必须配备显控终端协同工作[1~2]。操作员一方面可以通过终端显示的雷达回波判断船舶周围的航行情况,另一方面,导航雷达的显控终端一般也会提供强大的即自动雷达标绘仪(Automatic Radar Plotting Aid,ARPA)功能[3],实时提供各种辅助信息,协助操作员做出正确的规避判断。操作员通过PPI显(Plan Position Indicator,即P显)观察雷达回波及ARPA指示,两者叠加后呈现在终端显示屏上[4]。有时候为了观察的需要,还会叠加电子海图,并随着船舶位置、航向的改变实时更新显示。
2 主要工作流程
导航雷达的主要工作流程如图1所示,显控终端采集雷达原始视频,经过检测跟踪处理之后,产生目标点航迹等信息,显示软件将雷达视频与ARPA信息叠加后在P显显示。一般情况下,显示软件具有雷达操控、雷达状态显示、目标告警、辅助标绘以及电子海图叠加显示等功能[5]。
3 P显显示需求
3.1 雷达视频实时显示
导航雷达虽然作用距离短,但是采样率很高、天线扫描周期短、方位精度高,因此对其P显显示而言,单位时间内处理的数据量非常大[6],而且,为了达到较好的观察效果,还要求导航雷达视频显示具有回波平滑、增强以及尾迹显示等效果。

图1 导航雷达主要工作流程
3.2 ARPA相关信息显示
ARPA功能有助于操作员更好地判断本船的航行状态,通常情况下,ARPA显示交互的内容包括:跟踪目标信息,含图符、标牌、矢量线、监视标志、历史航迹点等;测量标志信息,含距标环、电子方位线、活动距标环、平行指引线等;本船标志,含船艏线、矢量线、安全轮廓线、航向线等;告警标志,含目标CPA告警、锚位监视告警、不良回波告警、目标进入警戒区告警等;AIS信息显示,含AIS图符、历史航迹点、激活或者休眠状态、AIS与雷达航迹关联结果等[7]。
3.3 电子海图显示
在单P显显示模式下,电子海图一般同雷达视频叠加显示,基本显示要求包括:多种海图显示要素的显示及切换;不同光照环境下的颜色切换;安全等深线、指北针、比例尺等显示;海图放大、缩小、旋转以及漫游功能等;航路设置以及偏航告警功能;海图自定义标绘及标绘属性设置等[8]。
4 传统显示处理方式
导航雷达的P显显示通常采用两种实现方式,一种是基于专用硬件平台实现雷达回波显示,辅助以软件绘图实现二次信息显示,两者叠加后显示整个P显画面;另外一种是基于纯软件化的方式实现雷达视频及二次信息显示。
基于专用硬件平台的P显显示雷达回波显示方面效率较高,但需专用的显示处理电路予以实现,并且应用方式不够灵活[9~10],譬如在与二次信息叠加时,需要二次信息绘制时采用的颜色与之匹配,会影响到电子海图的显示效果,另外,由于运算寄存器的限制,无法实现无极缩放以及任意漫游等。
基于软件化的P显显示通常是基于CPU实现雷达视频的扫描变换,在显示雷达视频的同时将二次信息叠加,然后定时刷新显示。相比较硬件实现而言,软件化方法通用性好,如基于DirectX、OpenGL等技术手段。但是由于其采用的视频绘制以及刷新机制,使得效率上有所欠缺,很难满足高实时性要求[11~12]。
因此,本文考虑采用英伟达GPU强大的并行计算功能实现雷达视频扫描变换[13],并通过“分层绘制+整体更新”的方式实现整个P显画面的更新显示。
5 基于CUDA的P显实现
5.1 P显分层机制
按照导航雷达显控终端P显显示要素的特点及刷新周期的差异性,将P显上绘制内容自下而上分为电子海图、雷达视频、测量标绘、AIS信息、点航迹信息等,如图2所示。

图2 P显显示图层
5.2 雷达视频扫描变换
导航雷达视频显示处理数据量非常庞大,但是逻辑运算却非常简单,本文采用英伟达GPU强大的并行计算能力代替CPU实现扫描变换,将雷达视频按方位拷贝进显存,在显存中计算完成并输出雷达回波显示图层。基于CUDA的雷达视频扫描变换如图3所示,GPU依据CPU输入的雷达参数、P显显示画面分辨率以及雷达视频等信息,经过多线程并行计算后,输出雷达视频图层供P显显示叠加使用。
5.3 P显显示更新方法
P显“分层绘制+整体更新”机制,其主要步骤如下:
步骤一:按照5.1分层方式,在GPU内部为各种显示要素单独开辟了图层,为各个图层设置叠加信号量、叠加顺序;
步骤二:在CPU中分配多个绘图HDC(设备描述表的句柄),与GPU中的绘图图层与之一一匹配对;
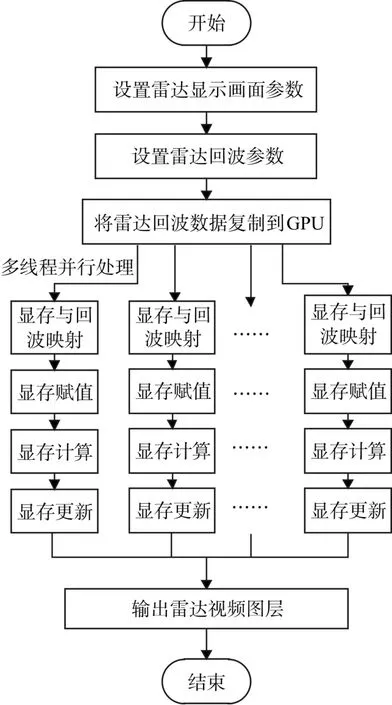
图3 基于CUDA的雷达视频扫描变换
步骤三:当某一图层需要更新时(譬如目标位置改变时,则需要更新其对应显示图层),在CPU端完成相应绘图HDC改变;
步骤四:CPU完成绘图HDC改变后,改变对应GPU图层的叠加信号量状态,通知GPU进行图层更新;
步骤五:GPU依据图层叠加顺序,将当前更新完成的图层同雷达回波进行叠加;
步骤六:采用显示更新函数,将更新后显示显存中的数据通过显卡显示输出。
P显多种要素叠加显示处理流程如图4所示。
6 应用效果
图5和图6给出了采用本文所述方法的导航雷达P显显示画面,其中图5为整个P显画面的显示,图6为局部放大后的P显画面。
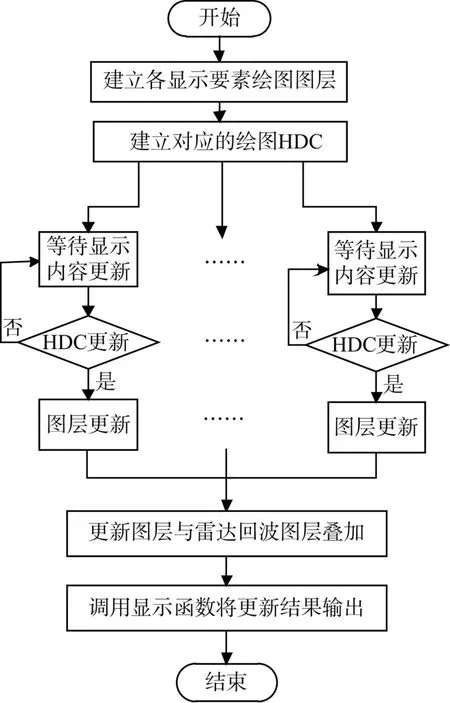
图4 P显多种要素叠加显示处理
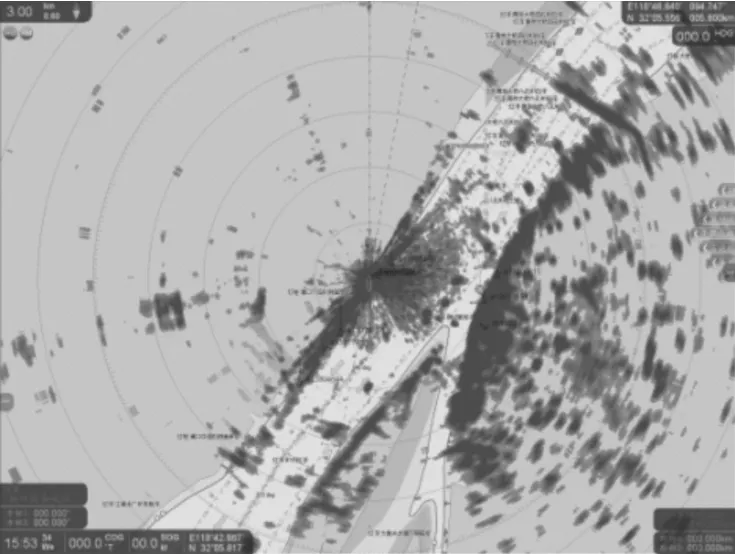
图5 P显多要素叠加显示

图6 P显多要素叠加显示(放大)
7 结语
本文基于当前流行的CUDA并行处理技术,实现了导航雷达P显的雷达视频、电子海图以及ARPA信息等多种显示要素叠加显示,相比较传统的基于硬件的扫描变换以及软件化方法,本文的方法更加灵活高效,该方法已在多个项目中推广应用,效果显著。
[1]姜波.现代导航雷达的应用[J].天津航海,2016,(1):48-49.
[2]徐学发.嵌入式导航雷达显控终端的研究与设计[D].镇江:江苏科技大学,2012.2-9.
[3]王斌.基于ARPA算法的航海应用研究[J].舰船电子工程,2012,32(4):57-58.
[4]厉静.船用导航雷达显示系统的设计与实现[D].西安:西安科技大学,2014.1-20.
[5]叶玲,王远斌.导航雷达目标告警技术研究[J].江苏科技信息,2016,(15):50-51.
[6]刘羽,曾杰辉,刘晓阳.一种船舶雷达导航回波数据压缩算法的设计[J]. 计算机测量与控制,2014,22(8):2512-2514.
[7]王德生,彭勇.ARPA系统与舰船导航雷达显示[J].中国雷达,1998,(2):20-24.
[8]张剑,席红艳.雷达在电子海图导航系统中的应用研究
[J].雷达与对抗.1996,(4):9-12.
[9]张国兵,赵严冰.基于FPGA的雷达回波信号设计与实现[J].雷达科学与技术.2010,(1):87-90.
[10]毕红葵等.用于光栅扫描雷达显示系统的坐标变换方法[J].无线电工程.2001,(S1):50-52.
[11]郭敏.Windows下利用DirectX进行PPI显示程序的开发[J].火控雷达技术.2002,31(2):48-55.
[12]彭劲松,秦永元,严恭敏.OpenGL在雷达图像实时显示中的应用[J].武器装备自动化.2006,25(1):5-6.
[13](美)Shane Cook.CUDA并行程序设计[M].北京:机械工业出版社.2016.16-23.
Multi Factor of P Display for Navigation Radar Based on CUDA
XU Yong JI Liangliang
(The 28th Research Institute of China Electronics Technology Group Corporation,Nanjing 210007)
In consideration of the requirements of the P display for navigation radar,a method with CUDA is proposed in this paper.With this method,the radar video,electronic chart,and ARPA message can be superimposed and displayed,and it has more flexibility.In addition,this paper adopts the mechanism of layered rendering and overall updating,update the display as needed,so it can reduce the frequency,and improve the rendering efficiency.In the end of this paper,the effect of the method is present.
marine navigation radar,electronic chart,P Display,ARPA,Compute Unified Device Architecture(CUDA),parallel processing,software for display
TN957
10.3969∕j.issn.1672-9730.2017.10.021
Class Number TN957
2017年4月9日,
2017年5月28日
徐勇,男,高级工程师,研究方向:雷达总体技术。嵇亮亮,男,高级工程师,研究方向:雷达数据处理。
猜你喜欢
科教新报(2022年2期)2022-02-21
艺术品鉴(2021年2期)2021-04-26
照相机(2021年11期)2021-02-03
航海(2020年4期)2020-08-17
读者·校园版(2019年21期)2019-10-18
少林与太极(2018年9期)2018-09-28
摄影之友(影像视觉)(2018年1期)2018-03-22
航海(2017年3期)2017-06-09
航海(2016年5期)2016-10-11
科学启蒙(2015年11期)2015-11-28
