
轮-履式移动机器人履带转向运动
2017-11-22 08:21帅立国苏慧哲郑丽媛费燕琼
哈尔滨工程大学学报 2017年10期
帅立国,苏慧哲,郑丽媛,费燕琼
(1. 河南科技学院 机电学院, 河南 新乡 453003; 2.上海交通大学 机器人研究所, 上海 200240)
轮-履式移动机器人履带转向运动
帅立国1,苏慧哲1,郑丽媛1,费燕琼2
(1. 河南科技学院 机电学院, 河南 新乡 453003; 2.上海交通大学 机器人研究所, 上海 200240)
针对室内外不同工作环境对移动机器人的结构有不同的要求,本文设计了一种的模块化的轮-履式移动机器人,描述了该轮-履式移动机器人纯轮式、纯履带式及轮履混合式等不同的运动模式;基于该机器人模块化的履带式结构特性,依据刚体平面运动理论,分析了该机器人的转向运动条件;基于转向阻力矩模型,建立了该轮-履式移动机器人完成履带式转向运动的约束方程。仿真和实验证明,此种轮-履式移动机器人地形适应能力强,在履带运动模式下,采取大的转向半径及小的转向比可有效减少机器人的转向阻力矩,能很好地完成转弯运动。
轮履; 运动模式; 移动机器人; 转向运动; 模块化; 阻力矩; 转向半径; 转向比
移动机器人的移动机构主要有轮式及履带式等几种类型[1-3],该种机器人在侦察、巡视、警戒、扫雷排险等危险与恶劣环境中有着广阔的应用前景。轮式机器人具有机构简单、驱动和控制相对方便、行走灵活、工作效率高等优点,但其越障能力及地形适应能力差,一般用于平坦路面。典型的轮式机器人有iRobot公司推出的吸尘器机器人Roomba,美国的JPL(jet propulsion laboratory)研制的Sojourner[4]。履带机器人支撑面积大,牵引附着性能好,地形适应能力强,在陡峭地形、复杂环境下有较高的越障能力和良好的环境适应性,但其速度相对较低,在长距离、高速度运动过程中或者是转弯时其能耗很高。典型的履带机器人如加拿大谢布鲁克大学研制的AZIMUT机器人5[5]、美国的Packbot机器人[6]及利用对称布置的双曲柄滑块机构改变履带外形的履带越障机器人[7]。
基于不同结构机器人的性能有较大差异,李智卿等研制了一种对非结构环境具有自适应能力的轮—履复合变形移动机器人[8],郭文增等提出了一种小型轮/履变结构移动机器人[9],为了充分发挥这两种类型移动机器人各自的优点,为了使机器人既能适应平坦路面,又能在崎岖不平的路面实现直线运动、转弯运动,本文设计一种新颖的模块化的轮-履式移动机器人,可以实现纯轮式运动、纯履带运动及轮履混合运动的相互转换,在远距离平坦路面时,机器人只依靠轮子运动,充分发挥其速度快、能耗低的优点;而在台阶、斜坡等不平坦路面,机器人能转换运动模式,依靠模块化的履带结构,实现机器人的纯履带运动,特别是能完成机器人的转弯运动,以充分发挥机器人的地形适应性。
1 轮-履式机器人模块化结构
本移动机器人采用三节四履带的结构,机器人前、后、左、右结构对称,前后性能完全一样,由4个车轮、4条模块化的履带摆臂和中间车体组成,如图1所示。摆臂能够绕履带驱动轮的中心轴摆动,通过履带摆臂的摆动,机器人可以实现纯车轮运动、纯履带运动及轮履混合运动的切换。

图1 轮-履式机器人结构Fig.1 The structure of track-wheel robot
2 轮-履式移动机器人运动模式
当机器人处于平坦环境时,如图2所示,运动模式为纯轮式运动。此时的移动机器人运行阻力小、机动灵活、功耗低,可以实现高速长距离运动。

图2 轮式运动模式Fig.2 Wheel motion mode
当机器人处于爬台阶或崎岖不平运动环境时,本轮-履式移动机器人由轮式运动模式切换到纯履带运动模式,如图3所示。图3(a)中为双节式配置,与地面的接触面积大,机器人运动稳定;图3(b)中为三节式配置,转向灵活;图3(c)中运动模式类似于腿式移动机构,一方面能够越过一些较低较窄的障碍物,另一方面增加了车体与地面的间隙。
在移动机器人实现轮式运动和履带式运动之间的模式转换过程中,常常会处于轮履混合运动的过度过程,如图4所示。对应于图3(a)、(b)模式和轮式之间的转换过程,图4(a)、(b)分别为相应的过度状态,此时机器人地面适应能力介于纯轮式运动和纯履带运动之间。

图3 履带运动模式Fig.3 Track motion mode
3 轮-履式移动机器人履带运动模式转向分析
对于本文中的轮-履式移动机器人在纯履带行驶状态下的转向运动作出如下假设[10]:
1)机器人在坚实平地上行驶,忽略履带下沉以及其他阻力的影响;
2)机器人的重量平均分配在4条履带上;
3)机器人转向速度较慢,可以忽略转向过程中离心力的影响。

图4 轮履混合运动模式Fig.4 Wheel-track motion mode
机器人履带运动模式转向示意图如图5,其中o′点为移动机器人的转向中心,o点为4条履带的几何中心,坐标系oxy为固连在移动机器人上的随动坐标系。v车为机器人速度,ω为移动机器人转向时相对于转向中心的角速度;RT为移动机器人的转向半径;b为单条移动机器人履带的接地宽度;IT为单条移动机器人履带的接地长度。
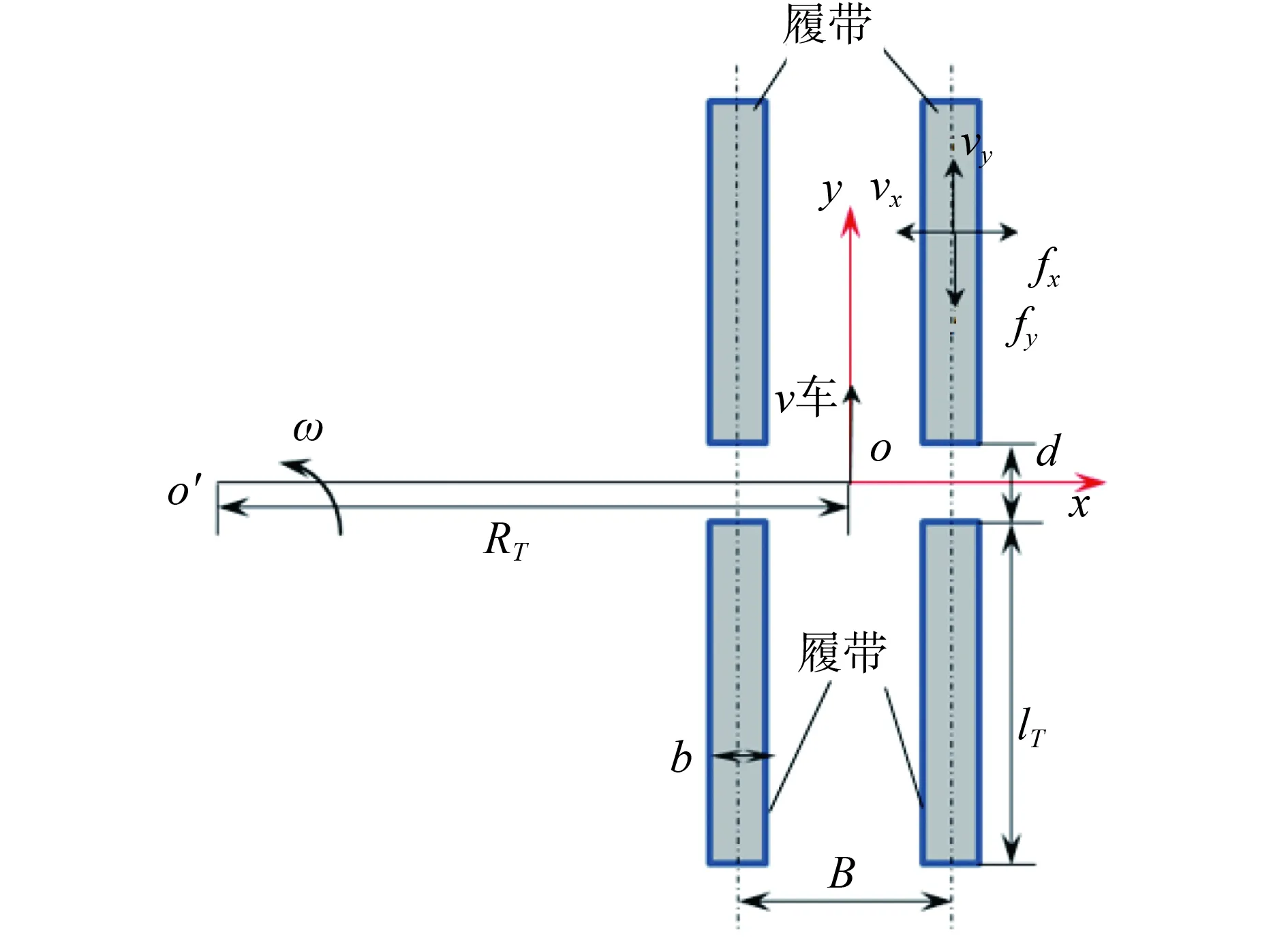
图5 履带运动模式转向示意图Fig.5 The steering diagram in track mode
履带运动模式转向时,移动机器人履带上牵连点的牵连速度vε为
vε=vxi+vyj
(1)
式中:vx、vy分别为牵连速度vε在坐标系oxy中沿x轴、y轴方向的投影分量;i、j分别为为坐标系oxy中x轴方向、y轴方向的单位矢量。
由刚体平面运动的相关知识和图5中的几何关系可知
(2)
式中:x、y分别为牵连点在坐标系oxy中的横坐标、纵坐标。
履带上与地面相接触的任意一点的滑动摩擦力df为
df=dfxi+dfyj
(3)
式中:dfx、dfy分别为滑动摩擦力df在坐标系oxy中沿x轴、y轴方向的投影分量。对于滑动摩擦力df的大小有

(4)
式中:μ为移动机器人履带与地面间的滑动摩擦系数,G为移动机器人的重量。
由于滑动摩擦力的方向与牵连速度的方向相反,于是有

(5)
联立式(4)与式(5)可得
(6)
将式(2)与(4)代入式(6),可得
(7)
对每一微元面积的阻力矩进行积分,可得移动机器人在转向时的转向阻力矩为

(8)
式中:d为同侧的前后两履带间的距离;B为左右两侧履带中心线间的距离。可推得


(9)
由式(9)可以计算出本移动机器人在转向时的阻力矩大小。现取G=180 N,lT=0.27 m,b=0.03 m,B=0.31 m,d=0.06 m,μ=0.47,将这些参数代入式(9)可得在不同转向半径RT时的转向阻力矩,如图6所示。

图6 履带运动模式时转向阻力矩与转向半径的关系Fig.6 The relationship between resistance moment and steering radius in track mode


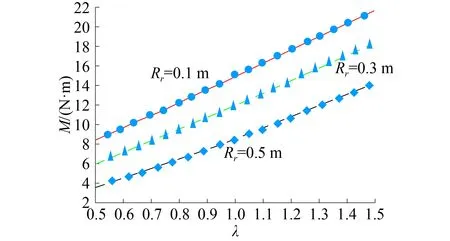
图7 履带运动模式时转向阻力矩与转向比的关系Fig.7 The relationship between resistance moment and steering rate in track mode
4 轮-履式移动机器人转向运动能力测试
移动机器人处于轮式运动模式时,让其两驱动轮以大小相等、方向相反的速度运行,移动机器人可以在原地实现180°的转向。当只有一侧驱动轮转动时,也可以非常顺利的实现掉头。
移动机器人处于双节式配置履带运动模式时,两侧的履带摆臂以方向相反、大小相同的速度运行可以实现原地180°的转向。同理,移动机器人处于三节式配置履带运动模式下时,也可以实现良好的原地转向,转向过程如图8所示。当移动机器人只有一侧履带摆臂转动时,三节式配置下的转向半径约为双节式配置下转向半径的1.5倍。
综上可得,移动机器人在轮式与履带式下都具有良好的转向性能,但在履带运动模式下应注意选择转向方式,避免采用单侧履带驱动转向的方法。

图8 移动机器人转向过程实验Fig.8 The steering process of the mobile robot
5 结论
1)设计了一种新颖的模块化轮-履式移动机器人,它能够实现纯轮式、纯履带式及轮履混合式运动模式的转换。
2)基于轮-履移动机器人的结构特点和转向阻力矩模型,建立了该轮-履式移动机器人完成履带式转向运动的约束方程。
3)实现该移动机器人转弯实验,由实验可知此种轮-履式移动机器人能完成轮式转弯和履带转弯,且在履带运动模式下,机器人三节配置的转向半径要比双节配置的转向半径大。
[1] BRUZZONE L, QUAGLIA G. Review article: locomotion systems for ground mobile robots in unstructured environments [J]. Mechanical sciences, 2012,3(2): 49-62.
[2] 曲杰,钟伟斌.轮履复合式变形车轮的设计与越障性能分析[J]. 华南理工大学学报,自然科学版, 2013, 41(5); 119-124.
QU Jie, ZHONG Weibin. Design and obstacle-surmounting performance analysis of wheel-track transformable wheel[J]. Journal of South China University of Technology:natural science, 2013,41(5): 119-124.
[3] SONG G M. A wheel-legged robot with active waist joint: design, analysis, and experimental results[J]. Journal of intelligent and robotic systems: theory and applications, 2016, 83(3-4): 485-502.
[4] WEISBIN C R, RODRIGUEZ G. NASA robotics research for planetary surface exploration [J]. Robotics & automation magazine,IEEE, 2000, 7(4): 25-34.
[5] MICHAUD F, LETOURNEAU D, ARSENAULT M, et al. Multi-modal locomotion robotic platform using leg-track-wheel articulations[J].Autonomous robots, 2005, 18(2): 137-156.
[6] YAMAUCHI B. PackBot: A versatile platform for military robotics[C]∥Proc Spie, Conference on Unmanned Ground Vehicle Technology VI. Orlando, 2004, 5422: 228-237.
[7] 孙智勇,左方印,朱洪俊,等. 双曲柄滑块机构变形履带机器人越障机构设计和分析 [J].机械传动, 2014, 38(6): 91-94.
SUN Zhiyong,ZUO Fangyin, ZHU Hongjun,et al. Design and analysis of barrier-crossing mechanism of double crank slider mechanism deformation tracked robot [J]. Journal of mechanical transmission, 2014, 38(6): 91-94.
[8] 李智卿,马书根,李斌,等. 具有自适应能力轮一履复合变形移动机器人的开发[J]. 机械工程学报, 2011, 47(5): 1-10.
LI Zhiqing,MA Shugen,LI Bin,et al. Development of a transformable wheel-track robot with self-adaptive ability [J]. Journal of mechanical engineering, 2011, 47(5): 1-10.
[9] 郭文增,姜世公,戴福全,等. 小型轮/履变结构移动机器人设计及越障分析[J]. 北京理工大学学报, 2015, 35(2): 144-148.
GUO Wenzeng, JIANG Shigong, DAI Fuquan, et al. Design of a small wheel-track mobile robot and obstacle-surmounting analysis [J]. Transaction of Beijing Institute of Technology, 2015, 35(2): 144-148.
[10] 周君,王殿龙,徐伟,等.履带车辆硬地面转向阻力矩算法的研究[J].起重运输机械, 2010, 20(5): 20-23.
ZHOU Jun, WANG Dianlong, XU Wei, et al. Research on algorithm of steering resistance moment of tracked vehicle on hard ground [J]. Hoisting and conveying machinery, 2010, 20(5): 20-23.
本文引用格式:帅立国,苏慧哲,郑丽媛,等. 轮-履式移动机器人履带转向运动研究[J]. 哈尔滨工程大学学报, 2017, 38(10): 1630-1634.
SHUAI Liguo, SU Huizhe, ZHENG Liyuan, et al. Study on steering movement of track-wheel mobile robot[J]. Journal of Harbin Engineering University, 2017, 38(10): 1630-1634.
Steeringmovementofcaterpillartrackofatrack-wheelmobilerobot
SHUAI Liguo1, SU Huizhe1, ZHENG Liyuan1, FEI Yanqiong2
(1.School of Mechanical and Electrical Engineering, He′nan Institute of Science and Technology, Xinxiang 453003, China; 2.Research Institute of Robotics, Shanghai Jiaotong University, Shanghai 200240, China)
Different operational environments have different requirements for the structure of mobile robots. This paper designed a new modular track-wheel mobile robot and described different motion modes, including pure wheel motion mode, pure track motion mode, and wheel-track motion mode. On the basis of the modular caterpillar structure of the robot and the plane motion theory of rigid body, the condition for steering movement was analyzed on the basis of the steering resistance moment model, and a constraint equation for the wheel-track mobile robot to complete the caterpillar steering movement was established. Experiments and simulations show that this type of mobile robot can adapt to various terrains. With the track motion mode, the steering resistance moment can be effectively reduced by adopting a large steering radius and a small steering ratio. Thus, the steering motion can be properly completed.
track-wheel; motion mode; mobile robot; steering movement; modular; resistance moment; steering radius; steering ratio
10.11990/jheu.201606006
http://www.cnki.net/kcms/detail/23.1390.U.20170816.1445.004.html
TP242.6
A
1006-7043(2017)10-1630-05
2016-06-01. < class="emphasis_bold">网络出版日期
日期:2017-08-16.
国家自然科学基金项目(51075272,61175069).
帅立国(1968-),男,教授,博士生导师.
帅立国, E-mail:liguo.shuai@126.com.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
军民两用技术与产品(2021年10期)2021-03-16
石油化工建设(2019年6期)2020-01-16
制造技术与机床(2018年8期)2018-10-09
中国军转民(2018年1期)2018-06-08
现代农机(2018年1期)2018-02-11
制造技术与机床(2017年3期)2017-06-23
橡胶工业(2015年4期)2015-02-23
筑路机械与施工机械化(2014年7期)2014-03-01
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
