
变重心潜器操控性能
2017-11-20 01:53:56刘可峰李家旺邹心宇沈文锋
造船技术 2017年5期
柯 力, 刘可峰, 李家旺, 邹心宇, 沈文锋
(1.江苏科技大学 船舶与海洋工程学院, 江苏 镇江 212003;2.宁波大学 海运学院, 浙江 宁波 315211)
变重心潜器操控性能
柯 力1, 刘可峰1, 李家旺2, 邹心宇1, 沈文锋1
(1.江苏科技大学 船舶与海洋工程学院, 江苏 镇江 212003;2.宁波大学 海运学院, 浙江 宁波 315211)
由于无人遥控潜水器(Remote Operated Vehicle, ROV)航速普遍较低,舵效较差,操纵控制较为困难。通过引入变重心系统实现高性能的矢量推进,可减少潜器需要配制的推进器数量。应用Simulink仿真软件建立变重心潜器水下运动模型并进行操纵控制仿真研究,结果表明变重心潜器具有较好的矢量推进性能。
无人遥控潜水器(Remote Operated Vehicle, ROV);变重心;矢量推进;操纵仿真
0 引 言
人类对各类自然资源的需求越来越多,陆地资源面临着巨大压力,对资源的迫切需求促使人类对海洋资源的开发。深海环境危险,受自身身体构造的限制,人类只能活动于有限深度的水中。为向深海进发,人们进行了多种潜水器的研究和开发,无人遥控潜水器(Remote Operated Vehicle, ROV)是各类潜水器中的一种重要形式,在进行海洋工程作业时,ROV具有作业时间长、实时性好等特点。
在海洋开发作业中,对潜器的操控性能有很高的要求。由于航行速度低、舵效差,为实现矢量推进的优秀性能,ROV等低速潜器一般采用多个推进器矢量布置的方法。重载作业型ROV为了满足高强度的作业需求,需配备更多推进器,如国内先进的“海马”号ROV[1]总共采用8套液压推进器,推进器数量多使得系统复杂且功率较大。
为满足低速操控方面的要求而又避免传统矢量布置方法推进器数量较多的缺点,人们对许多新颖的推进设备进行广泛的研究。国外的CAVALLO等[2]研发了1台应用3自由度矢量推进器的潜水器;国内的方世鹏等[3]研发了1种采用锥齿轮系统传动矢量推进器的水下载运器;侯家怡等[4]采用了倾转螺旋桨这种矢量推进器来达到较好的操控性能。潜器采用矢量推进器这一新颖的推进设备后,需要配置的推进器数量可以大为减少,但是将问题转到了矢量推进器的推力控制上,机构也比较复杂,在应用时对于控制系统的要求也较高。
受到水下滑翔机和潜艇变深系统的启发,在潜器上应用变重心机构和推进器固定的传统布置形式,在应用较少推进器的情况下,实现矢量推进良好的操纵性和可靠性。基于此目的,在传统潜水器上移植1套水下应用于滑翔机的变重心机系统,重点研究变重心机构的控制策略和变深机动性能,通过数值仿真验证,整个系统具有良好的操控性能。
1 变重心ROV运动方程
为简化设计,研究使用的变重心、自纵倾ROV耐压舱直接采用简单的圆柱体外形,两端配置的导流罩采用透明材料制成,可直接作为观察窗使用,以便降低加工难度。在耐压舱两侧分别布置1台水下推进器以便满足ROV航行的推进需求,采用高转速、小尺寸的导管螺旋桨作为推进器,以便满足ROV所需推力较大且布置空间较小的需求[5]。在耐压舱电气平台下方设置丝杠螺母机构,并在螺母上装设重块,可与螺母一起前后移动,组成ROV变重心机构。变重心ROV外形如图1所示。该ROV的运行特点是依靠变重心机构改变潜器的纵倾浮态,将推进器推力在纵向和垂向进行推力分量分配,使潜器具有垂直面机动能力,水平面机动则由2个推进器推力差形成的力矩实现,从而实现转艏运动。由于该ROV的研究重点为垂直面变深和水平面转艏机动,因此在数值仿真研究中变重心ROV的运动方程可以根据研究重点做一些简化。

图1 变重心ROV外形
在潜器的运动仿真研究中,通常采用ITTC国际水池会议推荐的坐标系、名词和符号形式,以便对比研究。变重心ROV的运动方程采用经典的格特勒标准运动方程[6]。格特勒标准运动方程具有6个自由度,分成3个轴向线性方程和3个轴向转动方程。根据变重心ROV的研究重点做相应简化修改,忽略一些高阶非线性项和环境载荷等影响,得到适宜变重心ROV的4自由度运动方程,其动力学方程为

设2个推进器的推力分别为T1和T2,用矩阵形式可以表示为Tp=[T1T2]T,ROV所需推力的矢量矩阵为Fp=[XTZTNT]T,他们之间的关系可表示为
式中:A为推力转换矩阵,其与推进器的位置和角度有关,可表示为
式中:θ为潜器的纵倾角度;a为推力作用力臂,是推进器推力轴线和中纵平面的距离。
采用矢量推进时,ROV实际控制的是各推进器所发出的推进力。变重心ROV还需控制重块移动量来实现需要的纵倾角度,因此需要引入上述转换矩阵A的伪逆矩阵A+,从ROV运动所需的各运动方向矢量的力和力矩反算出各推进器推力和重块移动量的控制量,可表示为
应用矩阵形式Tp,加入推进器推力后, ROV运动方程的状态方程可表示为

由于可移动重块可沿着潜器纵向来回移动,故潜器重心纵向位置可发生变化,其位置可表示为
式中:G为潜器重量;Gb为移动重块重量;XG0为潜器初始重心纵向位置;Xb为重块的纵向移动量。由于之前定义的潜器重心在中心处,故原来的XG0为0,因此上述公式可以简化为
2 变重心ROV仿真实例
经过浮力和设备重量的多次配平,将所研究的ROV主要尺度定为0.4 m ×0.29 m×0.16 m(长×宽×高),为拥有较大的转艏力矩,推进器推力轴线与耐压舱圆柱轴线距离取较大的0.12 m。整个ROV几何模型应用3D设计软件SolidWorks装配建成,经计算得其总质量为7.8 kg,绕z轴的转动惯量为0.08 kg·m2,可移动重块重量为1.5 kg,可移动距离为前后0.2 m。应用潜器操作性经验公式进行相关水动力系数计算,并根据使用规范换算得到标准形式,如表1所示。

表1 变重心ROV水动力系数
以上述ROV运动方程为基础,加入表1中的相关水动力参数,在仿真软件Simulink中建立变重心ROV运动模型,并应用工程上可靠的比例-积分-导数(Proportion,Integral, Derivative, PID)方法[7]对推力矢量、航速、重块移动量进行控制,形成潜器控制模型,并进行控制策略研究。变重心ROV在水平面直线航行时,变重心机构重块移动量为0,需要控制左右2个推进器输同样大小的力;当ROV在水平面转向时,变重心机构重块移动量保持不变,需要的转艏力矩由2个推进器发出不同的推力形成;当ROV需要改变深度机动时,需要控制重块移动,使潜器发生纵倾,推力在水平面和垂直面进行分配形成相应的推进力。
3 仿真结果分析
典型变深工况仿真采用上述操控策略进行。ROV一类的低速潜水器的航行速度一般为2 kn(1.028 8 m/s)左右,首先控制ROV到达该航行速度并进入稳定航行工况。在20 s时向系统发出深度增加1 m的操控指令,变重心机构重块接到指令开始移动使ROV纵倾角发生变化,ROV的深度到达设定值后重块移动到质心位置,ROV在新的深度上继续保持原定速度巡航。
图2和图3分别表现了深度改变过程中ROV深度变化和重块移动量变化情况,研究曲线变化可以发现,变重心系统运用于ROV变深机动时,变深指令的响应速度较快,重块移动运动平稳,证明应用变重心机构进行潜器变深机动的方法有效。在进行变深机动时,推进器推力在水平面和垂直面2个正交面进行投影分配,虽然ROV的水平面航行速度此时有一个降低和振荡的过程,但是ROV艏向速度不会发生改变,当变深机动结束时,纵倾角度逐渐恢复为0,ROV艏向和水平面前行速度方向一致,ROV航行速度逐步恢复到原设定值,如图4所示。

图2 变重心ROV深度变化曲线
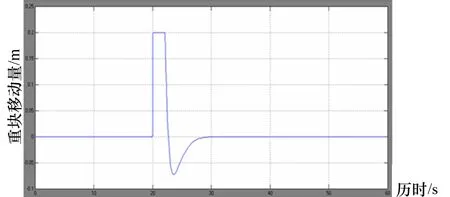
图3 变深时ROV重块移动变化曲线

图4 变深时ROV前进速度变化曲线

图5 变重心ROV转艏30°的艏向角变化曲线
当ROV进行水平面转向机动时,变重心机构重块在ROV重心处保持不动,这时变重心ROV和推进器固定布置的常规ROV完全一致,可以控制2个推进器产生大小相等方向相反的推力,形成1个较大的转艏力矩。图5中曲线展示了变重心ROV在20 s时开始转艏的过程,艏向角变化较快,到达设定值后很快趋于稳定。
4 结 论
通过以上数值仿真研究发现,潜器应用变重心系统后水平面转艏过程与常规潜器响应情况一致,在深度机动时展现出良好的操控性能,变深机动响应快速,变重心机构重块运动平稳,达到变重心潜器的设计应用目标。
通过采用变重心机构,潜器在使用较少推进器的情况下建立一个更为简洁的系统,同时降低潜器结构的复杂性和动密封方面的工艺要求,降低潜器的建造成本和控制系统的复杂性,对潜器的设计优化工作和工程实践具有重要参考价值。
[1] 陶军,陈宗恒.“海马”号无人遥控潜水器的研制与应用[J].工程研究:跨学科视野中的工程,2016,8(2):185-191.
[2] CAVALLO E,MICHELINI R C,FILARETOV V F. Conceptual design of an AUV equipped with a three degree of freedom vectored thruster[J]. Journal of Intelligent & Robotic Systems,2004,39(4):365-391.
[3] 方世鹏, 潘存云, 徐海军.水下载运器矢量推进螺旋桨传动系统设计与分析[J].机械制造,2009,47(1):22-26.
[4] 侯家怡, 刘可峰, 常琦,等. 倾转螺旋桨潜器操控研究[J]. 造船技术, 2015, 327(5): 83-87.
[5] 刘可峰, 姚宝恒, 连琏. 深潜器等厚导管螺旋桨敞水性能计算分析[J]. 船舶工程, 2014, 36(1): 37-40.
[6] 施生达.潜艇操纵性[M].北京:国防工业出版社, 1995.
[7] 刘可峰,连琏,姚宝恒,等. 潜艇垂直面舵桨联合操控仿真[J]. 舰船科学技术,2015, 37(6): 52-56.
ManeuverabilityofROVwithVariableCenterofGravity
KE Li1, LIU Kefeng1, LI Jiawang2, ZOU Xinyu1, SHEN Wenfeng1
(1.School of Naval Architecture and Ocean Engineering, Jiangsu University of Science and Technology,Zhenjiang 212003, Jiangsu, China; 2.Faculty of Maritime and Transportation,Ningbo University, Ningbo 315211, Zhejiang, China )
The low speed of Remote Operated Vehicle(ROV) would cause weak steerage, which results in the difficulty to the maneuverability. A variable center of gravity is appiled to ROV with low speed to reach the high performance of vectored propulsion and the number of thrusters is reduced. A model of the ROV is established by Simulink software. The simulation on maneuverability of ROV under low speed is studied and the simulation results show the excellent capacity of vectored propulsion by the ROV with variable center of gravity.
ROV(Remote Operated Vehicle); variable center of gravity; vectored propulsion; manoeuvring simulation
国家自然科学青年基金项目(51309133)
柯 力(1993-),男,本科,主要研究方向为海洋结构物设计制造
1000-3878(2017)05-0033-04
U661
A
猜你喜欢
作文周刊·小学六年级版(2023年32期)2023-08-17 21:11:50
舰船科学技术(2022年22期)2022-12-13 03:36:42
数字海洋与水下攻防(2022年2期)2022-04-26 09:09:24
中国船检(2019年6期)2019-11-29 17:05:54
中国军转民(2017年9期)2017-12-19 12:11:30
舰船科学技术(2017年5期)2017-06-19 19:18:59
中学数学杂志(高中版)(2016年6期)2017-03-01 18:51:01
中学生数理化·高一版(2016年2期)2016-05-30 10:48:04
船舶标准化工程师(2015年5期)2015-12-03 11:00:18
新高考·高一物理(2014年1期)2014-09-18 15:33:33
