基于IGS数据的电离层VR模型构建研究*
2017-11-20 10:45:20杨晓云刘代志何恒侯维君李义红
现代防御技术 2017年5期
杨晓云,刘代志,何恒,侯维君,李义红
(火箭军工程大学,陕西 西安 710025)
☞空天防御体系与武器
基于IGS数据的电离层VR模型构建研究*
杨晓云,刘代志,何恒,侯维君,李义红
(火箭军工程大学,陕西 西安 710025)
全球电离层模型的构建是描述地球近地空间环境的重要环节。IGS提供了全球电离层图GIMs,其时间和空间的分辨率较低。研究了BERN程序代码的GIMs插值方法和格网插值算法,对比了最邻近插值、三次样条插值和双线性插值不同插值算法间的差异。程序实现了全天任意时刻全球电离层模型的三维动态演示功能。为全球电离层分布变化研究提供了动态交互的三维电离层模型,为全球电离层模型的构建和电离层形态学研究提供了一种更为逼真、可交互的电离层三维演示平台。
IGS;GIM;VTEC;VRML;电离层模型;虚拟现实
0 引言
随着战场空间的拓展,“陆、海、空、天、电”五维空间已成为战场环境仿真中重要的环境仿真要素[1]。空间环境是航天器异常和故障的重要诱因。电离层是地球空间环境的重要组成部分,它对卫星通信、卫星导航系统有着重要的影响。
电离层复杂多变,它与太阳辐射、地球磁场的变化紧密相关,对其变化规律的研究尤为重要。在构建包含电离层信息的虚拟空间环境时,大量的电离层数据会导致虚拟仿真系统运行速度降低。如何提高虚拟仿真系统的运行速度以及快速构建逼真的全球电离层虚拟模型是当前需要解决的关键问题。国际GPS服务IGS(international GNSS service)提供了全球电离层格网地图,这些数据可在IGS的综合分析中心下载。IGS根据全球7个IGS分析中心给出的电离层VTEC(vertical total electron content)计算结果取加权平均值,求得最终的GIMs(global ionosphere maps )地图,最后将地图数据传送给全球资料中心和中央局的信息中心,免费的、公开的供用户使用[2]。本研究采用IGS提供的GIMs地图数据进行时间和空间插值计算并结合VRML(virtual reality modeling language)技术构建了全球电离层三维模型。
1 IGS电离层产品介绍
IGS提供的电离层产品格式为IONEX 1.0格式。其下载地址为:ftp:∥cddis.gsfc.nasa.gov /gps/products/ionex/yyyy/ddd。其中yyyy为观测数据的年份,ddd为为观测数据的日期,以每年1月1日为起始的天累计数。在IGS的FTP下载文件为压缩包,文件名为 igsgDDD0YYi.z。 解压缩后文件名为igsgDDD0.YYi,其中DDD为观测数据的日期,以每年1月1日为起始的天累计数;YY为观测年份的后2位数。如igsg2060.15i表示2015年从1月1日起算的第206天电离层全球地图数据[3]。
全球电离层地图全天从0点开始,每隔2小时提供一幅地图,共有13幅地图。如下所示:
1.0 IONOSPHERE MAP MIX IONEX VERSION/
这段数据为文件头,1.0说明文件为1.0 IONOSPHERE MAPS MIX 格式,
2012 6 19 0 0 0 EPOCH OF FIRST
MAP
2012 6 20 0 0 0 EPOCH OF FIRST
MAP
7200 INTERVAL
13 # OF MAPS IN
FILE
COSZ MAPPING
这段数据表示观测开始和结束时刻。数据间隔为7 200 s,全文件含有13幅图,TEC投影为VTEC值的投影函数为COSZ。
图1这段数据表示:全球有426个观测站、32颗卫星的数据被使用;地球半径为6 371.0 km;地图为二维地图;电离层高度为海拔450 km;纬度范围为87.5°~-87.5°,经度范围-180°~180°,格网间距纬度为5°,经度为-2.5°。
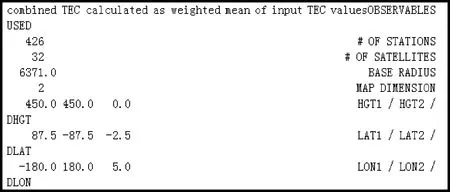
图1 IGS数据文件片段1Fig.1 IGS data file part 1
图2这段数据为电离层VTEC地图数据从2012-06-19T7:00:00开始的第1幅地图。该段数据纬度为87.5°,经度-180°~180°,海拔高度450 km处的格网电离层VTEC值[4-5]。
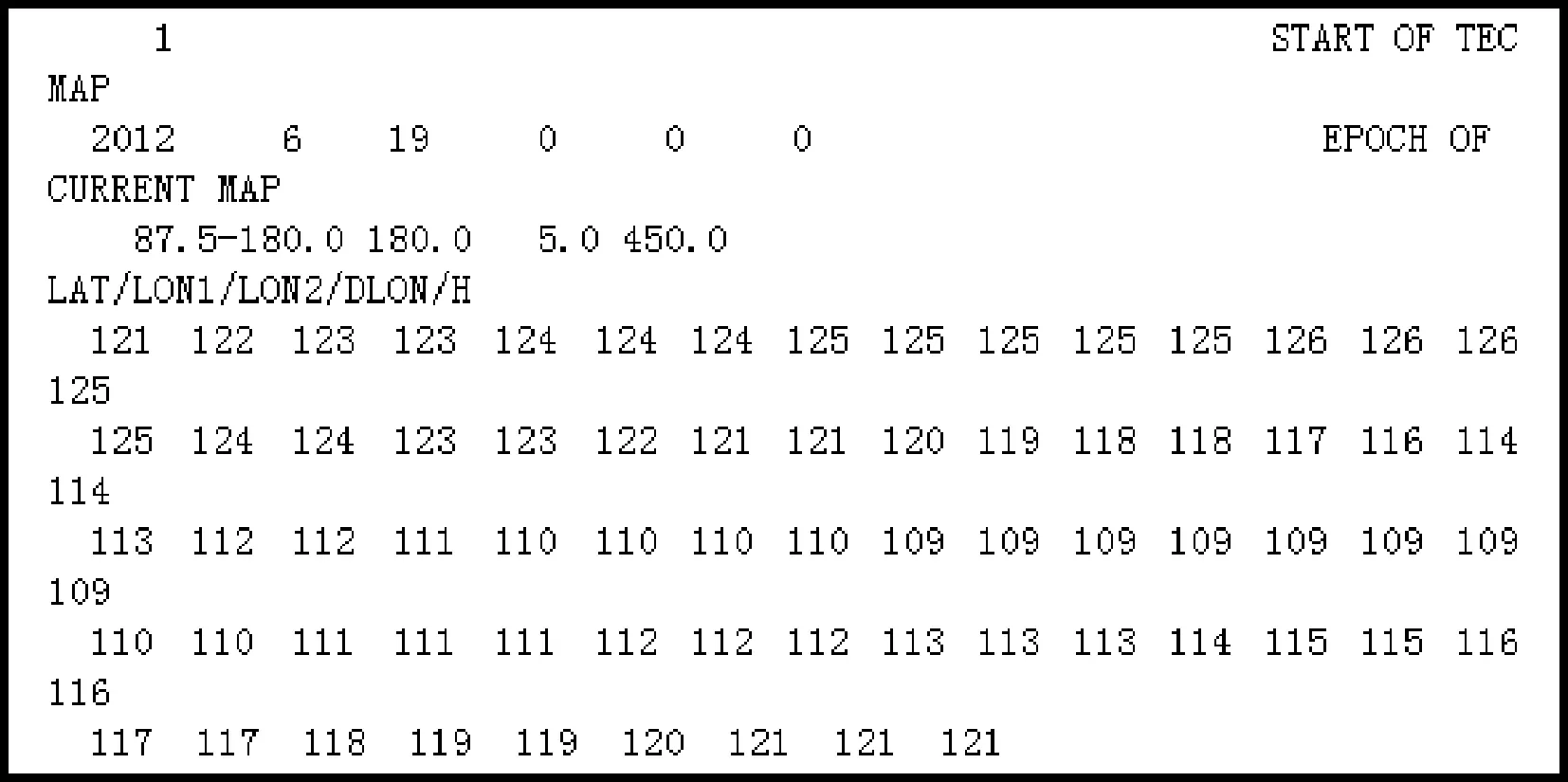
图2 IGS数据文件片段2Fig.2 IGS data file part 2
2 电离层VTEC地图插值方法研究
为了获得任意时间的全球电离层VTEC地图,需要对IGS提供的每隔2 h一幅的电离层VTEC地图进行时间域的插值,以期获得全天任意时刻t对应的GIM地图。
本文采用了BERN程序源代码中的插值方法,它提供了4种内插算法,其算法公式分别为[2,6-7]
E(β,λ,t)=Ei(β,λ),
(1)

(2)
(3)
(4)

根据上面的4个公式,可以得到一天中任意时刻的全球电离层地图。图3为IGS电离层地图数据经过最近邻插值得到的当日0时的GIM图。本文采用了式(3)进行了GIM图插值计算,然后再采用最邻近插值进行格网插值,计算结果见图3。图3为当日1时的GIM图。图3~6中,tec轴为格网电离层VTEC值,单位TECU;lat轴为格网纬度,单位(°);lon轴为格网经度,单位(°)。
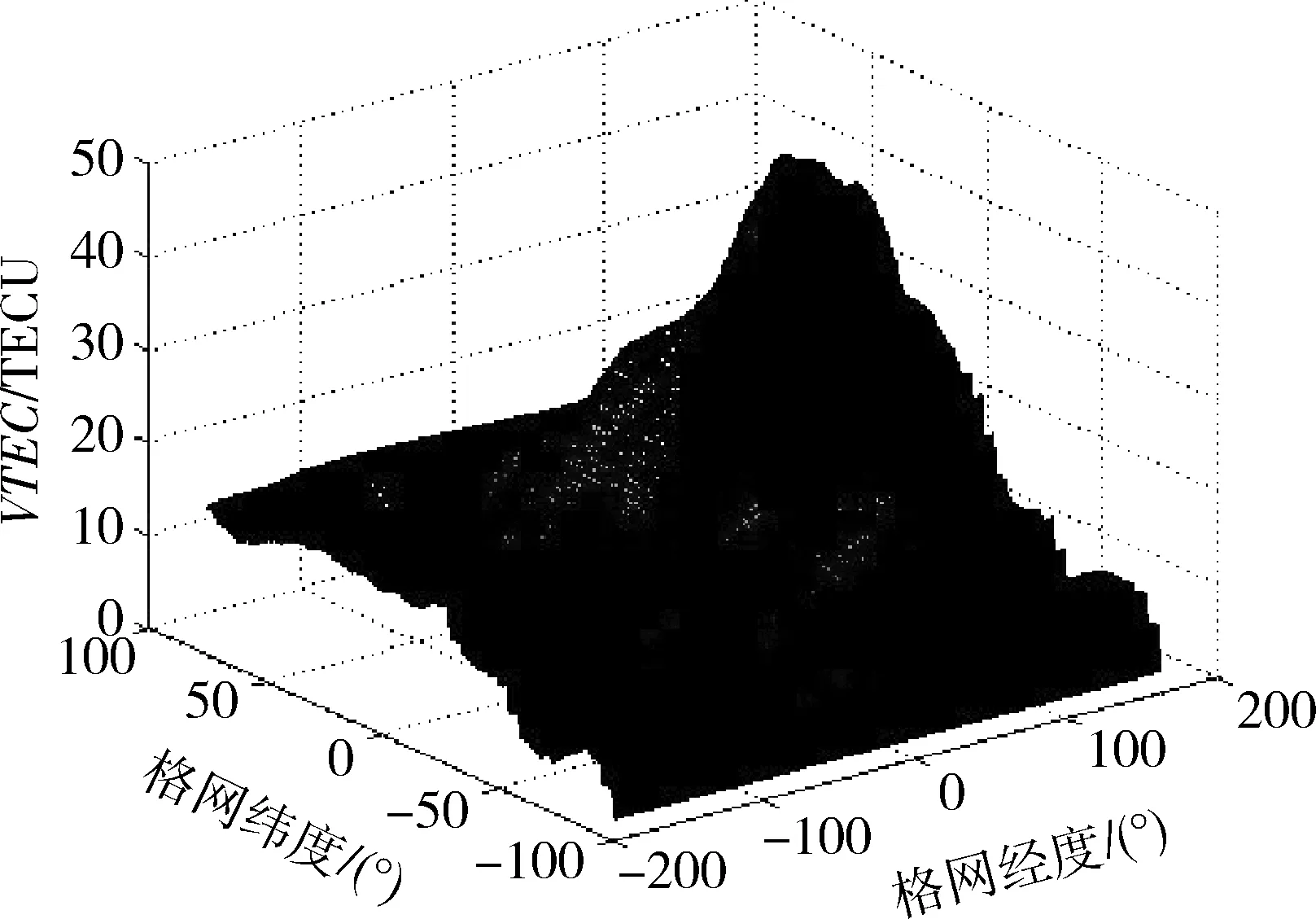
图3 当日1时的GIM图Fig.3 GIM Map at 1:00 am
本文还考察了采用式(3)与式(2)2种插值算法的差值,即由式(3)计算当日1时GIM图和式(2)计算当日1时GIM图差值见图4。从图4中可以看出考虑了地球自转和时间延迟的地图插值结果与仅考虑时间延迟的插值结果最大偏差在±7TECU。由于GIM地图格网较大,要得到全球任意位置的VTEC数据,还需对插值得到的GIM地图进行格网插值。本文采用了基于最邻近插值、线性插值、样条插值3种方法对格网地图进行插值,见图5邻近插值减去双线性插值结果。本文采用Matlab软件生成了格网为1°×1°的插值结果图。

图4 2种插值算法差值Fig.4 Deviation of two methods
设插值格网为数组[x,y],VTEC插值为数组Z1,脚本文件插值函数语句为
[x,y]=meshgrid(lons,lats);%lons为数组(-180:5:180) ,lats为数组(87.5:-2.5:-87.5);z为GIM地图中读取的VTEC数组
TecMap=[x,y,z];%加密格网
[X,Y]=meshgrid(-180:1:180,87.5:-1:-87.5);
%格网插值:最邻近插值(可选用样条插值、线性插值、三次样条插值)
Z1=interp2(x,y,z,X,Y,‘nearest’);%最邻近插值
Z1=interp2(x,y,z,X,Y,‘spline’);%样条插值
Z1=interp2(x,y,z,X,Y);%线性插值
Z1=interp2(x,y,z,X,Y,‘cubic’);%三次样条插值
不同插值算法输出的结果差异分布不均匀。总体看来,对比表明邻近插值减去双线性插值结果最大偏差小于±8.5TECU,见图5;三次样条减去双线性插值结果最大偏差小于±8TECU,见图6;各种插值算法偏差较大的区域分布在TEC变化剧烈的区域。

图5 邻近插值与双线性插值偏差Fig.5 Deviation between neighbor interpolation and bilinear interpolation
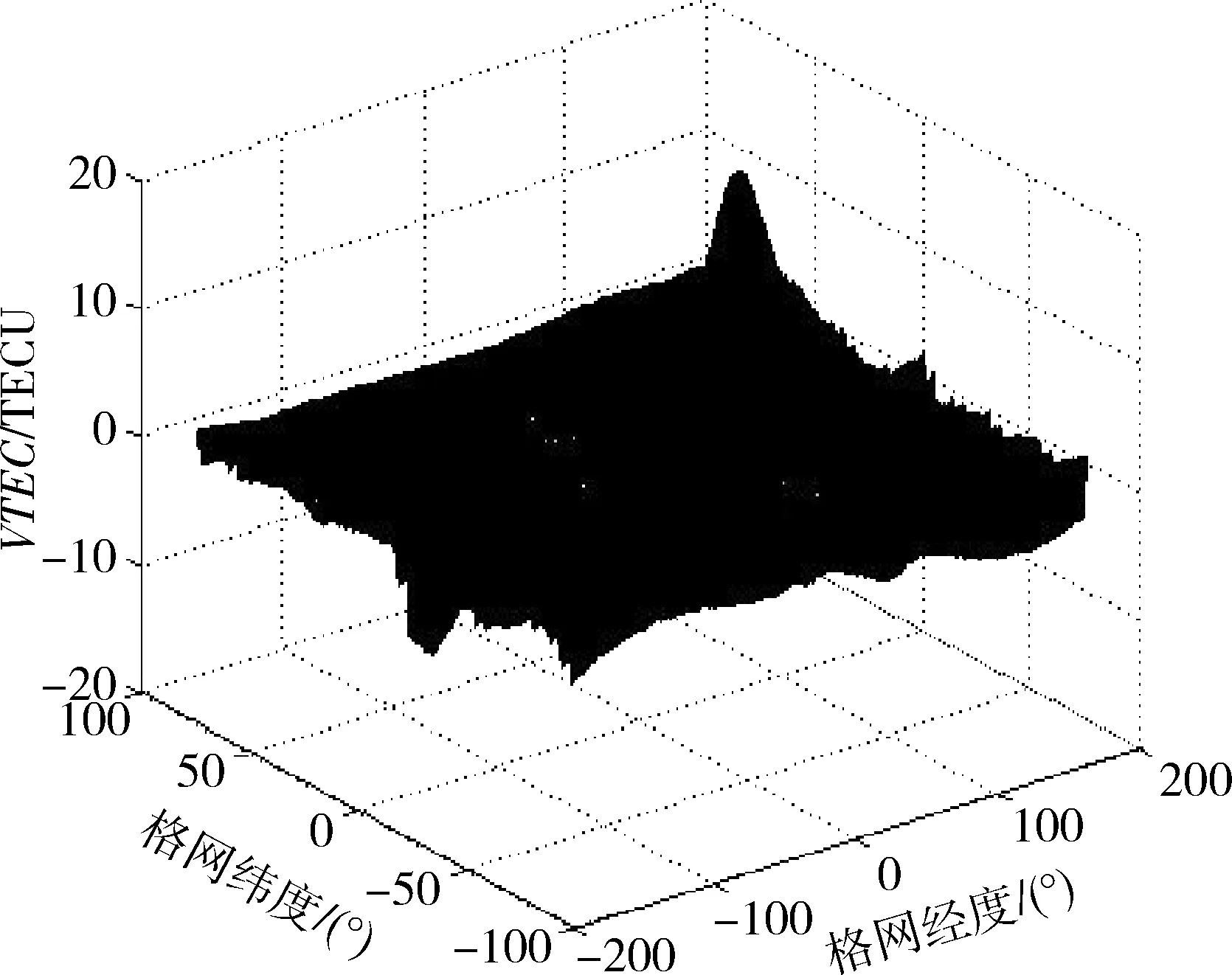
图6 三次样条插值与双线性插值偏差Fig.6 Deviation between cubic spline interpolation and bilinear interpolation
3 全球电离层三维VR模型的构建
为了更好展现全球电离层变化情况,并且减少虚拟仿真系统处理的数据量,将电离层数据转换为图形并作为纹理加入到虚拟仿真系统是一种有效的方法[8-9]。本文首先将插值好的全球电离层地图生成等VTEC值线图。对应的Matlab脚本为
contour(X,Y,Z1);
然后,再采用VRML语言构建了地球3D建模。其主要方法是生成一个球体模型,然后添加地球纹理。
其思路是先制作一个球体,然后选择一幅地球大陆图片earth.JPG,作为纹理贴在球体上[10-12]。VRML代码如下:
#VRML V2.0 utf8
DEF Sphere01 Transform {
translation 0 0 0
children [
Shape {
appearance Appearance {
material Material {
diffuseColor 0.5882 0.5882 0.5882
ambientIntensity 1.0
specularColor 0 0 0
shininess 3
}
texture ImageTexture {
url "earth.JPG"
}
}
在此基础上,再制作一个大小与上一个地球一样大小的透明球并使其与地球模型重合然后将插值模型得到的电离层等直线图作为纹理添加在透明球模型上。在添加等直线图时注意要使得2幅图位置相对应,本文采用的地图文件左边界为经度0°,所制作的VTEC等直线图左边界也为经度0°。否则贴图没有对应到一起会使得VTEC图与真实对应的地球位置错位偏移。
为了达到更好的仿真效果,使得浏览者能够既看到地球大陆轮廓又能看到VTEC等直线图,将已制作的等高线地图透明度设置为0.5,以便它贴在三维地球模型上时能够透出地球自然地貌,Shape节点只是增加transparency节点,设置为0.5;纹理的url设置为已制作的等直线图contour.JPG[13-15]。对应代码为
DEF Sphere02 Transform {
translation 0 0 0
children [
Shape {
appearance Appearance {
material Material {
diffuseColor 0.5882 0.5882 0.5882
ambientIntensity 1.0
specularColor 0 0 0
shininess 3
transparency 0.5
}
texture ImageTexture {
url "contour.JPG"
}
}
运行效果见图7。
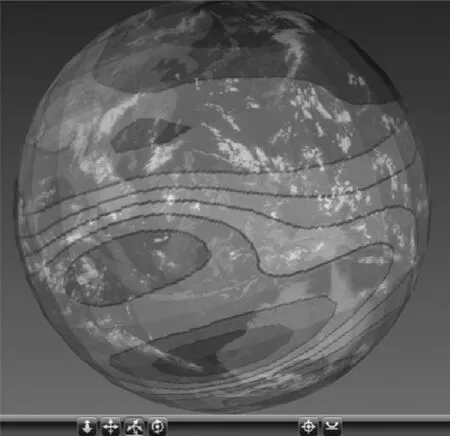
图7 全球电离层VR模型Fig.7 Global ionosphere VR model
4 结束语
本文首先研究了IGS电离层VTEC地图插值方法,在时间域和空间域对GIM地图进行插值。通过研究表明文章中的方法适合于构建全球电离层插值地图。通过对比不同插值算法,发现不同插值方法差异较大的地区主要分布在电离层VTEC值较大的区域,通常最大差异值达到±8TECU左右。本文将插值结果生成等直线图,将其应用在三维VR地球模型中,得到了具有交互、动态演示功能的全球电离层模型。使用该方法可以制作全球任意时刻全球电离层VR模型,为全球电离层形态学、电离层与地球磁场研究以及电离层与太阳活动研究提供了交互式的三维仿真演示平台。
[1] 王洁.面向服务的复杂电磁环境态势可视化[D].南京:南京理工大学,2015.
WANG Jie.Service Oriented Visualization of Complex Electromagnetic Environment Situation[D].Nanjing:Nanjing University of Science and Technology,2015.
[2] CDDE AC TEAM.Global Ionosphere Maps Product by CODE[DB].International GNSS Service.USA.2012.ftp:∥ftp.unibe claiub/ionev/soura.
[3] SCHAER S,GURTER W,FELTENS J IONEX.The Ionosphere Map Exchange Format Version[S].Proceedings of the IGS AC Workshop,1998:233-247.
[4] Ionex Data Format[DB].International GNSS Service.USA.2016.ftp:∥igs.org/ igscb/ data /format /ionex1.ps
[5] Ionex Data[DB].International GNSS Service.USA.2016.ftp:∥cddis.gsfc.nasa.gov / gps/ products/ ionex/
[6] 王五魁,刘长建,吴洪举.IGS电离层VTEC产品内插算法解析[J].全球定位系统,2013,38(6):18-19.
WANG Wu-kui,LIU Chang-jian,WU Hong-ju.Interpolating Algorithm Analysis of IGS Ionosphere VTEC Product[J].GNSS World of China,2013,38(6):18-19.
[7] 杨晓云,何恒,刘凯,等.IGS电离层VTEC地图内插模型研究[C]∥西安:国家安全地球物理丛书(十一),2015:15-16.
YANG Xiao-yun,HE Heng,LIU Kai,et al.Interpolating Algorithm Analysis of IGS Ionosphere VTEC Product[C]∥The 11thGeophysics and National Security(The Application of Geophysical Front),Xi’an,2015:15-16.
[8] 关卓威.基于临近空间平台的立体信息获取及可视化技术研究[D].哈尔滨:哈尔滨工业大学,2014.
GUAN Zhuo-wei.Stereo Information Acquisition and Visualization Technology Studies Based on Near Space Platform[D].Harbin:Harbin Engineering University,2014.
[9] 何英英.基于WEB的三维场景建模和漫游技术研究[D].哈尔滨:哈尔滨工业大学,2013.
HE Ying-ying.Research on Model and Roam Technology of 3D Scene Based on WEB[D].Harbin:Harbin Engineering University,2013.
[10] 莫雨帆.虚拟现实漫游系统的研究和实现方法[D].武汉:武汉科技大学,2012.
MO Yu-fan.Research and Implementation of Virtual Reality Roaming System[D].Wuhan:Wuhan University of Technology,2012.
[11] 李翔宇.基于VRML的交互式虚拟漫游场景的应用研究[D].天津:天津大学,2013.
LI Xiang-yu.VRML-Based Interactive Virtual Roaming Scenario Application and Research[D].Tianjin:Tianjin University,2013.
[12] 曾子力.基于VRML的虚拟现实中三维建模技术的研究[J].电脑编程技巧与维护,2016(6):78-79.
ZENG Zi-li.Research on VRML 3D Technology[J].Computer Programming Skills & Maintenance,2016(6):78-79.
[13] 夏明锦.基于Web 3D的VRML的三维造型及动画技术探讨[J].信息与电脑,2016(5):130-131.
XIA Ming-jin.VRML 3D Model and Animation Technology Research Based on Web 3D[J].China Computer & Communication,2016(5):130-131.
[14] 杨欢,刘小玲.虚拟现实系统综述[J].软件导刊,2016(4):36-37.
YANG Huan,LIU Xiao-ling.Summary of Virtual Reality System[J].Software Guide,2016(4):36-37.
[15] 王辉,宋昌统.基于X3D的虚拟现实技术建模[J].电脑知识与技术,2016(5):238-239.
WANG Hui,SONG Chang-tong.Virtual Reality Technology Modeling Based on X3D[J].Computer Knowledge and Technology,2016(5):238-239.
IonosphereVRModelConstructionBasedonIGSData
YANG Xiao-yun, LIU Dai-zhi, HE Heng, HOU Wei-jun,LI Yi-hong
(Rocket Force University of Engineering,Shaanxi Xi′an 710025,China)
The construction of global ionosphere model is an important element of the near-earth space environment. IGS presents GIMs, but it has a low-resolution in time and space. The interpolating algorithms of BERN program and interpolation algorithms are used and the difference between nearest, spline and cubic interpolation algorithms are presented. The program outputs a 3D ionosphere VR model. The platform has a function to show a dynamic and mutual 3D ionosphere model at anytime and anywhere. Moreover, the 3D ionosphere demo platform is realistic and exact for the construction and morphologic research of the ionosphere.
international GNSS service (IGS); global ionosphere maps (GIM); vertical total electron content (VTEC); virtual reality modeling language (VRML); ionosphere model; virtual reality
2016-09-08;
2017-02-20
杨晓云(1980-),女,陕西三原人。讲师,博士生,主要研究方向为电离层闪烁。
通信地址:710025 陕西省西安市灞桥区洪庆街道同心路2号2906分队E-mail:yangxiaoyun303@126.com
10.3969/j.issn.1009-086x.2017.05.002
TP391.4
A
1009-086X(2017)-05-0007-05
猜你喜欢
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
空间科学学报(2021年4期)2021-08-30 08:31:16
空间科学学报(2021年2期)2021-07-21 08:43:28
空间科学学报(2020年6期)2020-07-21 05:36:46
制造技术与机床(2017年7期)2018-01-19 02:30:00
软件(2017年6期)2017-09-23 20:56:27
计算机测量与控制(2017年6期)2017-07-01 16:24:14
雷达学报(2017年6期)2017-03-26 07:53:02
江西理工大学学报(2015年3期)2015-12-22 05:26:18
导航定位学报(2015年2期)2015-06-05 09:27:34