
窄条翼布局导弹摇滚特性及流动机理
2017-11-17 10:21冯黎明达兴亚吴军强赵忠良
航空学报 2017年4期
冯黎明, 达兴亚, 吴军强, 赵忠良
中国空气动力研究与发展中心 高速空气动力研究所, 绵阳 621000
窄条翼布局导弹摇滚特性及流动机理
冯黎明*, 达兴亚, 吴军强, 赵忠良
中国空气动力研究与发展中心 高速空气动力研究所, 绵阳 621000
钝头体窄条翼布局导弹在大攻角下拥有极为优异的纵向气动特性,但横向容易失稳,做快速机动时容易诱发非指令的横向不稳定运动。通过开展高速风洞自由摇滚试验和数值模拟,研究了窄条翼导弹自由摇滚特性和流动机理,试验与计算吻合较好。研究发现:较大迎角时,窄条翼面积中心距离尾舵前缘根部5~6倍直径时,模型会进入极限环摇滚,窄条翼位置对模型稳定性有显著的影响,去掉窄条翼或尾舵时,模型均不会进入摇滚;模型空间流场特性表明,气流经过窄条翼时形成的片涡,对背风舵产生强烈的干扰,抑制了尾舵涡的形成和发展,使背风舵动态失稳,导致模型进入极限环摇滚。
窄条翼; 导弹; 极限环摇滚; 动态; 流动干扰
“摇滚”是飞行器滚转方向的自激振荡,通常以极限环振荡形式出现[1-3],摇滚运动在一个周期内运动吸收的能量等于耗散的能量,形成等幅等周期振荡[4-9]。传统导弹的布局形式相对简单,飞行迎角不大,摇滚问题不突出。研究主要集中在机翼摇滚,例如,国内外对典型三角翼摇滚开展了大量研究[10-12]。已有文献表明,摇滚运动特性与飞行器布局密切相关[13-14],不同构型的摇滚运动机理差别很大。所以机翼摇滚的研究成果很难直接应用于细长体外形布局的导弹上,孙海生[14]在研究战斗机摇滚特性时,观察到了单独机身的摇滚现象,因此刘伟等[15]指出,现代导弹也应进行摇滚运动的研究。
窄条翼布局是高机动战术导弹采用的一种典型布局形式,其特点是在弹身中后部和尾舵的正前方布置极小展弦比窄条翼[16]。这种布局导弹纵向气动特性极为优异,在大迎角范围内(60°)法向力保持单调递增,但由于窄条翼和舵之间强烈的流动干扰,导致导弹横向气动特性非常复杂,导弹在做快速机动时,容易诱发滚转方向不稳定的运动。目前,还不清楚亚、跨声速范围内该类布局导弹的摇滚特性,更缺乏对摇滚运动产生机理的认识。因此迫切需求开展这方面的研究,能够给导弹飞行控制系统提供理论支撑。
小展弦比导弹的滚转气动阻尼相对很小,动态试验中轴承摩擦阻尼等干扰因素对摇滚特性具有显著的影响,目前也没有一种普适的修正方法,造成试验系统误差偏大的困难;摇滚数值模拟涉及气动和运动耦合问题,对耦合求解策略和计算任务量提出了很高的要求。本文拟在气动和运动高阶紧耦合计算方法的基础上,开展数值模拟,结合高速风洞自由摇滚试验,搞清窄条翼布局导弹自由摇滚特性,挖掘气动/运动耦合特性和摇滚运动产生的流动机理。
1 自由摇滚数值模拟方法
1.1 流场主控方程
研究对象属于三维非定常湍流流动,一般采用三维可压缩非定常雷诺平均Navier-Stokes方程[17],在贴体坐标系(ξ,η,ζ)可写为
(1)
式中:Q为守恒变量;F、G和H为无黏通量;Fv、Gv和Hv为黏性通量;t为时间。
1.2 飞行力学方程
弹体坐标系里导弹绕质心转动的动力学方程为[18]
(2)
运动学方程为
(3)
式中:ϑ、ψ和γ分别为导弹俯仰、偏航和滚转角;I为转动惯量;M为力矩;ω为角速度。
1.3 数值模拟方法
流场求解采用基于结构网格的有限体积法,时间推进采用双时间步法[19],黏性项采用Jameson中心差分,无黏项采用Roe格式[20],使用Venkat限制器,湍流模型采用Spalart-Allmaras模型。气动/运动耦合策略采用了文献[21]中提到的三阶Adams紧耦合方法,在保证一定的精度和流场收敛的前提下,能显著减小计算任务量。
2 自由摇滚高速风洞试验
2.1 设备和模型
试验在中国空气动力研究与发展中心高速空气动力研究所1.2 m×1.2 m跨超声速风洞中进行。
试验模型为钝头体、窄条翼和梯形尾舵布局导弹,如图1中所示,模型弹径D=42 mm,全长L=19D,窄条翼根部长6D,窄条翼面积中心距弹头顶点11D,将该状态定义为基本状态模型。0° 迎角时的堵塞度约0.1%。摇滚特性通常用平均滚转角γ0,(°)、滚转角均方根σγ、频率f,Hz和振幅φ,(°)来表征。
平均滚转角:
(4)
滚转角均方根:

(5)
图1 窄条翼布局导弹外形
Fig.1 Shape of missile with strake wings
2.2 结果及讨论
图2 模型自由摇滚时间历程
Fig.2 History of free roll angle of model
试验马赫数Ma=0.6,迎角α范围为7°~40°,图2中给出了基本状态模型自由摇滚时间历程曲线。定义模型在滚转角等于0° 时,处于“×”字布局。模型在迎角为7°~15° 时稳定在“十”字布局;在15°~20° 之间转向“×”字布局;在20°~30° 时模型基本稳定在“×”字布局,但平衡滚转角与对称状态略有偏差,同时伴有微振,以25° 最为明显;在35°时模型形成“×”字布局准极限环摇滚,平均滚转角γ0=1.35°,频率f=13 Hz,滚转角均方根σγ=11.3°,振幅φ=16°;在40°迎角时,平均滚转角γ0=0.73°,频率f=14 Hz,滚转角均方根σγ=8.9°,振幅φ=12.6°。可见,基本状态模型随着迎角增大,先从“十”字稳定过渡到“×”字稳定,然后在35° 迎角出现摇滚,且摇滚的振幅随迎角增大而减小,频率基本保持不变。
在基本模型状态基础上,去掉窄条翼或尾舵时,模型均基本稳定在0°附近,即模型只有单独窄条翼或尾舵时不会发生摇滚。
3 自由摇滚数值模拟
3.1 基本状态自由摇滚特性
首先计算基本状态模型,图3中给出了模型计算网格。网格采用标准多块对接形式,弹身周向分布了223个网格点,将尾舵流向方向的网格进行了加密,网格总量约500万,其上游距头部10L,下游距后缘10L,远场边界距中心线7L。为提高并行计算效率,将网格分为140个块,保证每个计算核心分配到大致相等的计算量。使用了三重“W”型多重网格。
计算时,在平均滚转角γ0和初始角速度等于0的状态下启动。计算条件为:Ma=0.6,来流密度为1.225 kg/m3,基于弹径的雷诺数ReD=1×106,转动惯量为0.001 kg·m,计算迎角α=30°~40°;物理时间步长取0.001 s;导弹在初始滚转角释放。
表1中给出了不同迎角下的计算结果。当迎角小于35°时,模型处于动稳定,最终稳定在平衡滚转角处;当迎角增大到36°~40°时,模型进入极限环摇滚。迎角进一步增大时,气动力作用下极限环开始不稳定,出现连续翻滚等复杂的动态运动特性。
图3 模型计算网格
Fig.3 Computational grids of model
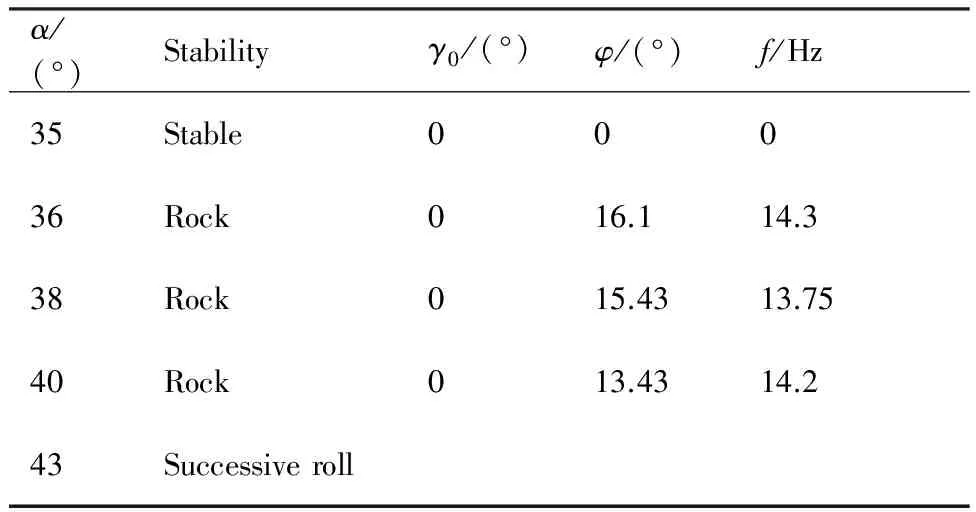
表1 基本状态模型仿真结果Table 1 Simulation results of basic model
图4中给出了α=35°、36° 时的摇滚特性曲线。Cmx为滚转力矩系数,α=35° 时,模型从γ= -5° 开始释放,滚转振幅一直在衰减,直到最终稳定在γ=0° 处;α=36° 时,滚转力矩随滚转角的迟滞曲线呈双“8”形,模型进入极限环摇滚,相图中前一个周期和下一个周期完全重合,摇滚振幅为16.1°,频率为14.3 Hz;此状态的风洞试验振幅为16°,频率为14 Hz。数值模拟与试验基本吻合。
图4 摇滚运动特性
Fig.4 Rock motion characteristics
3.2 窄条翼和尾舵对摇滚特性的影响
对去掉全部窄条翼(No strake wings)或去掉全部尾舵(No tailfins)状态进行了数值模拟,计算得到的结果均是动态稳定的,即如果弹体上只有窄条翼或只有尾舵时,导弹均不会进入极限环摇滚,这一结果与试验结果一致,也从侧面说明窄条翼和尾舵之间存在强烈的流动干扰,对导弹摇滚特性有显著影响。
3.3 窄条翼位置对摇滚特性的影响
以基本状态模型的窄条翼位置为基准,远离尾舵的方向移动D,记作Strake+D,靠近尾舵的方向移动D,记作Strake-D,表2中给出了计算结果,只有Strake-D模型进入了极限环摇滚,且摇滚起始迎角提前到33°,振幅相对于基本状态显著增大,即动不稳定性增强了;同时,Strake+D模型动态稳定,这一结论进一步验证了窄条翼与尾舵的干扰特性,且作用强度随距离的减小而增强。第4节将详细讨论摇滚中窄条翼与尾舵之间的干扰。

表2 不同窄条翼位置模型仿真结果
4 窄条翼导弹摇滚的流动机理分析
4.1 部件稳定性分析
以基本状态模型在迎角等于36°的状态为例,由于模型的轴对称性,可将模型分解为弹体、迎风和背风窄条翼以及迎风和背风尾舵。计算时,利用网格分块可以很方便的对某一块物面区域单独积分,输出气动力和力矩等。图5中给出了部件滚转力矩迟滞曲线。
弹身的迟滞环面积几乎等于0,处于中立动稳定;迎风和背风窄条翼的迟滞环都是逆时针,处于动稳定;迎风尾舵和背风尾舵迟滞环都是顺时针,处于动不稳定,但背风尾舵的迟滞环面积相对比迎风尾舵大很多。背风尾舵在平衡滚转角附近迟滞环面积非常大,在两头相对较小,窄条翼则分布比较均匀。结合前面的窄条翼对模型尾舵动稳定性影响的结论,可以直观地得到摇滚运动的动力特性:
1) 在小滚转角范围,由于窄条翼产生的动稳定性不足以抵消背风尾舵产生的动不稳定性,模型整体会吸收能量,导致了模型在滚转方向的运动发散。
图5 部件滚转力矩迟滞曲线
Fig.5 Roll moment time-lag of part
2) 当滚转角逐渐增大,背风尾舵的动不稳定性逐渐减弱(对应图中迟滞环缩小),在“8”字环交叉点后模型又重新进入动稳定状态,此后模型不断耗散能量,角速度开始减小。
3) 在最大滚转角处,模型的动能被全部耗散,速度减小到零,在尾舵的静态滚转力矩(窄条翼和弹身提供的滚转力矩很小)作用下,模型重新开始向平衡点加速。
4) 在从最大滚转角向平衡点加速的过程中,尾舵依然在吸收能量,但吸收的能量不足以抵消窄条翼耗散的能量,模型处于动稳定,经过“8”字环交叉点后模型又重新进入动不稳定状态,模型吸收能量加速经过平衡位置。
4.2 窄条翼对尾舵的流场干扰分析
4.2.1 静态干扰
首先对基本状态模型开展了静态数值模拟,图6中给出了在迎角为36°时有/无窄条翼模型的流线和压力云图。
对于窄条翼导弹,较大迎角时涡系对导弹气动特性有着至关重要的影响,因此有必要对涡系的形成、发展和相互作用的过程开展详细的研究,图6 中分别给出了基本状态模型和去窄条翼模型,在迎角等于36°时的静态流场特性,Cp为压力系数,观察方向为由后向前。
从图6所示的基本状态模型流线图可以看出,气流向下游运动,在到达x/L=0.2截面时已经分离(记作前体涡),并在模型表面诱导分离出二次涡;当气流到达窄条翼后,前体涡已经飘得很高,并从窄条翼上方掠过,同时吸收了背风面窄条翼上方产生的涡量。上下窄条翼之间由于气流受阻,黏性作用增大,产生了一对新的分离涡(记作片涡),但受背风窄条翼的影响,空间发展受到制约。气流经过窄条翼之后,在x/L=0.75 截面,由于片涡不再受窄条翼阻挡,逐渐抬高,又受到主流的横向挤压,最后与前体涡合并。到达x/L=0.85时,已经合并成了一对新的自由涡(依然将其称作片涡)。气流到达尾舵截面x/L=0.91时,形成了一对远离背风舵、高高飘起的自由涡,上下尾舵之间产生了一对分离涡,但背风面没有产生新的涡,这与窄条翼截面的流场结构具有相似性。
无窄条翼的情况下(图6(b)),分离涡结构在尾舵附近发生了显著的变化。无窄条翼时前体涡向下游发展,不断吸收弹身表面产生的涡量,导致前体涡一直贴近弹体,同时保持较高的强度。到达x/L=0.91时,前体涡依然保持较低的高度,此时背风舵也产生了分离涡(在x/L=0.95清晰可见)。尾舵涡的产生也导致背风舵表面形成了大面积的低压区。显然带窄条翼模型背风舵上下表面压差小很多,使得舵面横向稳定性减弱。
以上静态流场分析表明,窄条翼片涡对背风尾舵的影响最大,直接导致背风舵表面不再产生尾舵涡,从而减弱了导弹的横向稳定性。这与前文力矩迟滞曲线得到的结论是一致的。
图6 不同截面静态流线及压力分布
Fig.6 Steady streamline and pressure distribution of different sections
4.2.2 动态干扰
图7给出了基本状态模型在迎角等于36°、极限环摇滚时,一个周期内窄条翼和尾舵截面的流场特性。
在模型顺时针经过0°时(ω>0,图7(a)),尾舵上方左涡接近舵面,而右涡高高飘起,这直接导致了左侧背风舵表面产生很大的压差,形成顺时针的滚转力矩(力矩大于0),而右侧背风舵的压差相对小很多,所以背风舵总体产生了顺时针滚转力矩。在模型逆时针经过0°时(ω<0,图7(c)),涡结构刚好相反,进而导致背风舵产生逆时针滚转力矩(力矩小于0)。可见,模型处于平衡滚转角附近时,背风舵总是会产生使模型偏离平衡位置的力矩,即模型动不稳定。模型顺时针到达极限位置16.1° 时(ω>0,图7(b)),右侧尾舵背风面上方压力呈负值,产生逆时针滚转力矩,当模型逆时针到达极限位置-16.1° 时(ω>0,图7(d)),则在左侧尾舵背风形成低压区,产生顺时针滚转力矩。极限位置时,力矩会阻止模型偏离平衡点,模型又处于动稳定。
对于无窄条翼模型,由于自由涡靠近弹体表面,很难像带窄条翼模型那样使自由涡在空间非对称运动,因此也就没有进入摇滚。
图7 截面流线及压力云图
Fig.7 Streamline and pressure countour of sections
5 结 论
1) 窄条翼面积中心距离尾舵前缘根部5~6倍直径、在迎角等于33° 到40° 时,模型会进入极限环摇滚;去掉窄条翼或尾舵后,模型均不会进入极限环摇滚;而改变窄条翼的位置,也会使模型从不稳定转变为稳定。
2) 导致模型进入摇滚的直接原因是背风尾舵的动不稳定性;随着滚转角的增大,背风尾舵的动不稳定性减弱,整个模型又重新进入动稳定状态,最终导致模型进入极限环摇滚。
3) 从稳态和动态流场中都可以看出,摇滚与窄条翼片涡对尾舵的干扰密切相关,其中最显著的是片涡抑制了尾舵涡的产生和发展。
[1] NGUYEN L T, YIP L P, CHAMBERS J R. Self induced wing rock of slender delta wings: AIAA-1981-1883[R]. Reston: AIAA, 1981.
[2] DIMITRIADIS G, COOPER J E. Limit cycle oscillation control and suppression[J]. Aeronautical Journal, 1999, 103(1023): 257-263.
[3] NELSON H C, ANDREW S A. Experimental investigation of wing rock of slender wings and aircraft configurations, fluid dynamics of high angle of attack[M]. Berlin: Springer-verlag,1992: 413-422.
[4] ANANTHKRISHNAN N, SUDHAKAR K. Characterization of periodic motions in aircraft lateral dyanmics[J]. Journal of Guidance, Control, and Dynamics, 1996, 19(3): 680-685.
[5] PLANEAUX J B, BECK J A, BAUMANN D D. Bifurcation analysis of a model fighter aircraft with control augmentation: AIAA-1990-2836[R]. Reston: AIAA, 1990.
[6] EVANS C. An investigation of large amplitude wing-rock[J]. The Aeronautical Journal, 1984, 38(873): 55-57.
[7] CHADERJIAN N M. Navier-Stokes prediction of large-amplitude delta-wing roll oscillations[J]. Journal of Aircraft, 1994, 31(6): 1333-1340.
[8] NELSON R C, ARENA A S, THOMPSON S A. Aerodynamic and flow field hysteresis of slender wing aircraft undergoing large-amplitude motions: AGARD CP-498 [R]. Neuilly: AGARD,1992.
[9] BRANDON J M, NGUYEN L T. Experimental study of effects of forebody geometry on high angle of attack static and dynamic stability: AIAA-1986-331[R]. Reston: AIAA, 1986.
[10] ROSS A J. Investigation of nonlinear motion experienced on a slender-wing research aircraft[J]. Journal of Aircraft, 1972, 9(9): 625-631.
[11] LIEBST B S. The dynamics, predicition, and control of wing rock in high-performance aircraft[J]. Philosophical Transactions of Royal Society, 1998, 356(1745): 2257-2276.
[12] ORLIKRUCKEMANN K J. Aerodynamic aspects of aircraft dynamics at high angles of attack[J].Journal of Aircraft, 1983, 20(9): 737-752.
[13] ERICSSON L E. Various sources of wing rock[J]. Journal of Aircraft, 1990, 27(6): 488-494.
[14] 姜浴标, 孙海生, 张钧, 等. 不同部件对机翼摇滚特性影响的风洞试验研究[J]. 飞行力学, 2002, 20(4): 39-43.
JIANG Y B, SUN H S, ZHANG J, et al. Investigation on wing rock in a low speed wind tunnel for fighter with different configurations[J]. Flight Dynamics, 2002, 20(4): 39-43 (in Chinese).
[15] 刘伟, 刘小亮, 张涵信, 等. 大攻角运动时的机翼摇滚问题综述[J]. 力学进展, 2008, 38(2): 214-228.
LIU W, LIU X L, ZHANG H X, et al. A review on investigations of wing rock problems under high angles of attack[J]. Advances in Mechanics, 2008, 38(2): 214-228 (in Chinese).
[16] ALLEN J M. Aerodynamics of an axisymmetric missile concept having cruciform strakes and in-line rail fins form Mach 0.60 to 4.63: NASA/TM-2005-213541[R]. Washington, D.C.: NASA, 2005.
[17] 阎超. 计算流体力学方法及应用[M]. 北京: 北京航空航天大学出版社, 2006: 18-23.
YAN C. CFD method and applications[M]. Beijing: Beihang University Press, 2006: 18-23 (in Chinese).
[18] 钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2008: 36-41.
QIAN X F, LIN R X, ZHAO Y N. Missile flight mechanics[M]. Beijing: Beijing Institute of Technology Press, 2008: 36-41 (in Chinese).
[19] DUBUC L, CANTARITI F, WOODGATE M, et al. Solution of the unsteady Euler equations using an implicit dual-time method[J]. AIAA Journal, 1998, 36(8): 1417-1424.
[20] ROE P. Approximate Riemann solvers, parameter vectors, and different schemes[J]. Journal of Computational Physics, 1981, 43(2): 357-372.
[21] 达兴亚, 陶洋, 赵忠良. 基于预估校正和嵌套网格的虚拟飞行数值模拟[J]. 航空学报, 2012, 33(6): 977-983.
DA X Y, TAO Y, ZHAO Z L. Numerical simulation of virtual flight based on prediction-correction method and chimera grid[J]. Acta Aeronautica et Astronatica Sinica, 2012, 33(6): 977-983 (in Chinese).
Rockmotionandflowmechanismofmissileconfigurationwithstrakewings
FENGLiming*,DAXingya,WUJunqiang,ZHAOZhongliang
HighSpeedAerodynamicsInstitute,ChinaAerodynamicsResearchandDevelopmentCenter,Mianyang621000,China
Bluntforebodymissileconfigurationwithstrakewingshasexcellentlongitudinalaerodynamiccharacteristics,buthasseriousproblemsinlateralstabilitytoinduceuncommandedmotioninunsteadilylateraldirectionwhenthemissilemaneuversrapidly.Free-to-rollaerodynamicsandflowmechanismofmissilewithstrakewingsarestudiedthroughhighspeedwindturnelfree-to-rolltestsandnumericalsimulation.Resultsofsimulationsagreewellwithwindtunneltestresults.Studyshowsthatmodelentersintolimitcyclerockwhenthedistancebetweenthecenteroftheareaofstrakewingsandleadingedgeoftailfinsis5to6diameters.Positionofstrakewingshassignificanteffectonthestabilityofmodel.Themodelwillnotenterintolimit-cyclerockwhenstrakesortailfinsareremoved.Spacialflowcharacteristicsshowthatthewingvorticesgeneratedbystrakewingscanstronglyinterfereleewardfinstoaffecttheformationanddevelopmentoffinvortices.Thisleadstothelossofdynamicstabilityofleewardfins,andmodelthusenterslimit-cyclerock.
strakewing;missile;limit-cyclerock;dynamic;flowinterference
2016-05-09;Revised2016-08-02;Accepted2016-08-24;Publishedonline2016-09-260950
URL:www.cnki.net/kcms/detail/11.1929.V.20160926.0950.004.html
s:NationalNaturalScienceFoundationofChina(11372336,91216203,11532016)
2016-05-09;退修日期2016-08-02;录用日期2016-08-24; < class="emphasis_bold">网络出版时间
时间:2016-09-260950
www.cnki.net/kcms/detail/11.1929.V.20160926.0950.004.html
国家自然科学基金 (11372336,91216203,11532016)
*
.E-mailfenglm8201@163.com
冯黎明, 达兴亚, 吴军强, 等. 窄条翼布局导弹摇滚特性及流动机理J. 航空学报,2017,38(4):120410.FENGLM,DAXY,WUJQ,etal.RockmotionandflowmechanismofmissileconfigurationwithstrakewingsJ.ActaAeronauticaetAstronauticaSinica,2017,38(4):120410.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2016.0252
V211.3
A
1000-6893(2017)04-120410-09
(责任编辑: 鲍亚平, 张晗)
*Correspondingauthor.E-mailfenglm8201@163.com
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
小资CHIC!ELEGANCE(2019年20期)2019-07-02
空气动力学学报(2019年2期)2019-05-08
汽车实用技术(2018年22期)2018-12-08
中国建筑金属结构(2018年4期)2018-05-23
山东青年(2016年12期)2017-03-02
专用汽车(2015年1期)2015-03-01
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
