压缩编码孔径成像重构算法
2017-11-14 01:41高宇轩孙华燕张廷华
兵器装备工程学报 2017年10期
高宇轩,孙华燕,张廷华,都 琳
(装备学院 光电装备系, 北京 101416)
【基础理论与应用研究】
压缩编码孔径成像重构算法
高宇轩,孙华燕,张廷华,都 琳
(装备学院 光电装备系, 北京 101416)
现有光测成像设备易受到目标特性、天气、成像系统等多种因素影响,传统成像体制下难以突破探测器和光学系统限制,无法实现目标场景的高分辨率成像以及图像的快速传输和实时处理。压缩编码孔径成像技术作为一种新型成像体制,可突破探测器成像极限,实现超分辨率成像。该成像体制主要利用图像的稀疏性,通过重构算法求解数学模型进而高分辨率恢复目标图像;重构算法是压缩编码孔径成像过程的关键步骤,在一定程度上决定了图像的重构精度以及重构速度;对现有的压缩编码孔径成像重构算法进行分类总结,并对典型算法进行仿真验证,可为该领域未来的研究提供借鉴。
压缩编码孔径;重构算法;超分辨率重构
传统的光学成像方式是通过构建光学系统,利用探测器直接成像。提升成像分辨率意味着增大光学系统焦距、口径或减少探测器像元尺寸、增加阵元数量,这就使得成像系统复杂度以及实现难度非线性增加。压缩感知(Compressive Sensing,CS)[1-2]理论的出现,为提高光学成像探测分辨率提供了一种新的思路。该理论充分利用图像的稀疏性和可压缩性,指出对目标场景进行多次低分辨率观测就可以精确重构出目标图像。因此,压缩编码孔径成像技术应运而生。该技术通过在光学系统的适当位置添加孔径编码器件,对图像信号进行线性投影,实现对目标的压缩采样,而后利用重构算法对多次观测后获取的混叠图像进行解码重构。这不仅减少了图像存储、传输和处理过程中的信息量,也极大地降低了对后端探测器的要求,可实现超分辨率重构。其重构精度与目标的稀疏特性、编码方式和重构算法有关,目标的稀疏特性决定了重构所需观测次数,也就是测量率;编码方式的选取决定了重构能否进行;重构算法则直接决定了成像精度与重构速度。
1 压缩编码孔径成像系统基本原理
压缩编码孔径(Compressive Coded Apertures,CCA)成像是[3-4]在编码孔径成像的基础上应用压缩感知原理提出的一种新型成像机制。当一幅图像在某变换域下能够稀疏表示时,可通过低分辨率观测值重构出高分辨率图像。与传统光学成像不同,光通过编码孔径模板多次压缩采样后在探测器上所成的是交错、混叠的二维模糊图像,需要利用重构算法进行反演重构,达到高分辨率恢复目标图像。理论上讲,压缩编码孔径成像方式可使探测器分辨率远小于编码孔径分辨率的情况下,重构出与编码孔径分辨率相同的图像信号[5]。其成像过程如图1所示。

图1 压缩编码孔径成像原理
从图1可以看出,整个压缩编码孔径成像过程主要包含两个核心内容:压缩编码部分和解码重构部分。关键技术包括目标稀疏特性、孔径编码模式以及重构算法3个方面。对目标的稀疏特性进行分析是在该场景下选择更恰当的编码模式;良好的编码模式主要是为了确保对目标图像进行压缩采样的过程中,也就是原始信号投影到低维空间的过程中主要信息不丢失;重构算法主要负责从低维空间中精确重构原始信号。其中重构算法是压缩感知领域的核心内容,在压缩编码孔径成像过程中直接影响图像的重构精度、重构速度以及对噪声的鲁棒性等。
2 重构算法
重构是指从低维观测信号中恢复出高维信号的过程,目标图像的稀疏重构过程可以看成是求解优化问题。重构算法主要分为贪婪算法和凸优化算法[6]。贪婪算法是针对求解L0范数最小化提出的,算法重构精度相对较低、重构所需观测次数较高,应用范围广。凸优化算法是针对L1范数最小化模型提出的,此类算法重构精度较高,所需观测次数少,但是计算复杂度较大,当图像规模较大时处理较为困难。
2.1 贪婪算法
贪婪算法通过每次迭代过程中选择局部最佳匹配原子逼近信号,此类算法应用相对成熟。匹配追踪(MP)算法[7]每次迭代过程中只能选取与信号最匹配的一个原子进行稀疏逼近并求出余量,然后再选取与余量最匹配的原子。但是在迭代过程中无法保证选取的原子与残差值正交,且迭代次数较多,算法有较大的局限性。正交匹配追踪(OMP)算法[8]弥补了MP算法的不足,迭代过程中仍然只能选取一个原子,但是对已选择的原子进行Gram-Schmidt正交化以保证迭代的最优性,减少迭代次数。
由于MP算法和OMP算法每次迭代只能选取一个原子,算法的效率不高。采用阈值原则的分段正交匹配追踪(StOMP)算法[9]和正则正交匹配追踪(ROMP)算法[10]有效解决了这一问题。这两种算法的时间复杂度虽然有所降低,但需要很大的观测值才能较为精确的重构出目标图像。之后,有学者引入具有回溯思想的压缩采样匹配追踪(CoSaMP)算法和子空间追踪(SP)算法,此类算法的优势在于可以同时选取多个原子,并对选取的支撑集原子进行回溯以剔除错误原子,提高了算法的效率。
以上所有算法都是在稀疏度K已知的前提下进行的,实际应用中稀疏度K往往都是未知的。稀疏度自适应算法(Sparsity Adaptive Matching Pursuit,SAMP)[11]可在稀疏度未知的情况下重建出原始信号。该算法通过设置可变步长T来逐步逼近信号。如果步长T远小于稀疏度K,则需要大量的迭代次数;如果S取值过大,会导致稀疏度估计值与实际值相差较大,重构误差较大。除此之外,在迭代初始没有对原子进行筛选,可能会选择错误原子,降低重构精度。在以上算法的基础上,学者们又进行改进,提出了各种优化算法。表1为各贪婪算法性能对比。
2.1.1 典型贪婪算法的优化方法
1) 多候选集广义正交匹配追踪(MsGOMP)算法[12]
针对贪婪类信号重构算法精度不高的问题,按照测量矩阵与残差内积的相关性选出多个候选集,降低了因相关性而错选原子的概率,提高重构精度。在迭代过程中分别将多个原子加入对应候选集,提高算法收敛速度,同时降低了算法的复杂度,最终从多个候选集中选出残差最小的作为最终支撑集。但是MsGOMP算法在重构时间上处于劣势,并且候选集数量越多,所需重构时间越长。
2) CoSaMP算法的优化方法
压缩采样硬阈值追踪(CoSaTP)算法[13]针对CoSaMP算法每次迭代选择与剔除原子的原则不同导致支撑集选取不精确的问题,在剔除原子时结合硬阈值追踪(HTP)算法的思想,保证选择与剔除的标准相一致。并且该算法同时具有CoSaMP算法和HTP算法的优势,可以更加准确的获取支撑集,重构精度较CoSaMP算法有较大提高,具有较好的鲁棒性和抗噪能力;改进的稀疏度自适应压缩采样匹配追踪(MACSMP)算法[14]针对CoSaMP算法需要稀疏度K已知的局限性,通过预先估计获得一个粗略的稀疏度值K0,结合变步长自适应思想,逐渐逼近真实值。因此,可以在稀疏度未知的情况下进行重构。并且在迭代过程将正则化思想引入进一步筛选原子,从而提升算法的重构精度。与SAMP、OMP、CoSaMP相比,计算量较低,运行时间较短,克服了CoSaMP、SAMP算法的不足。
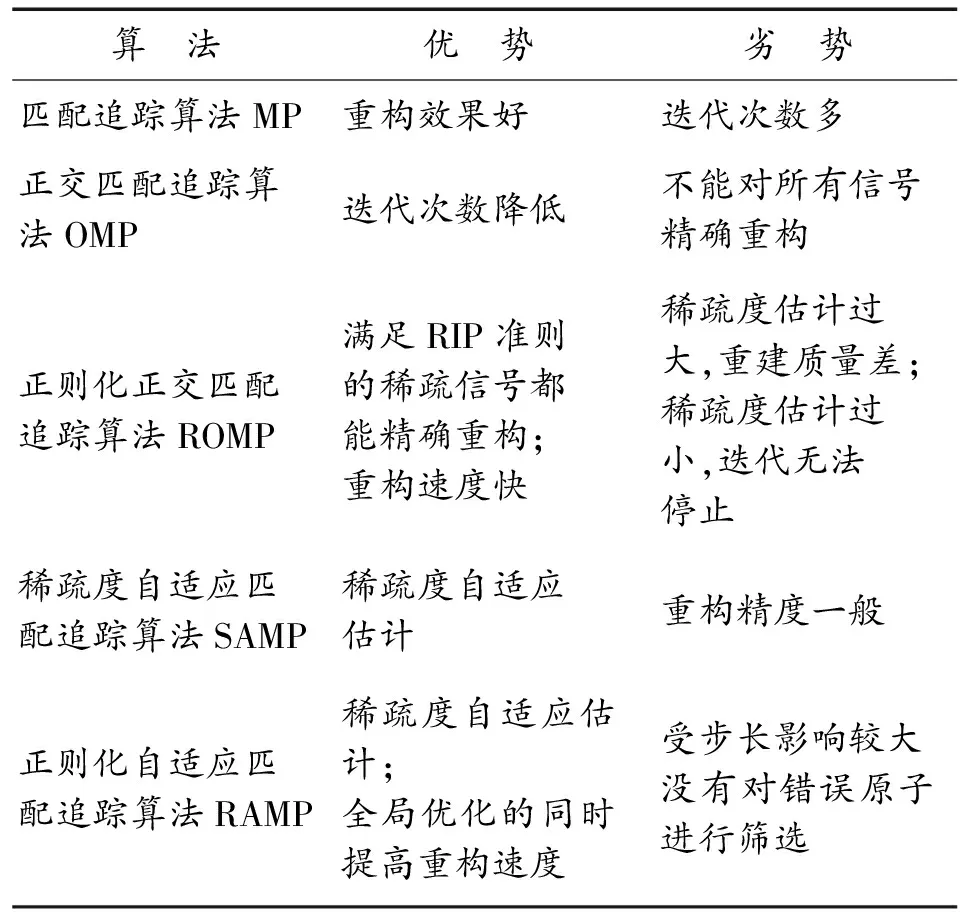
表1 各贪婪算法优劣势对比
3) DStOMP算法[15]
StOMP算法需要经验性的设置阈值和迭代次数,人为设置的参数值往往不可靠。针对此问题,利用粒子群算法对StOMP算法参数设置进行优化,提高StOMP算法的性能。粒子群算法(Particle Swarm Optimization,PSO)[16]是一种基于迭代的优化算法,具有收敛速度快、参数设置简单,是一种高效的寻优算法。
苍颉作书,史皇作图,容成作历,大挠作甲子,羲和作占日,恒羲作占月,后益作占岁,隶首作数,燧人氏钻木出火,黄帝作火食,神农作耒,古者垂作耒耜,黄帝作冕,神农作琴,蚩尤作兵……[注]孙冯翼:《世本八种》,北京:中华书局,2008年,第3页。
4) 基于抛物线变步长的稀疏度自适应正则回溯型匹配追踪(SAMP-PVRB)算法[17]
稀疏度自适应正则回溯型匹配追踪(SAMP-RB)算法将正则化原则选择和回溯思想引入SAMP算法中,可以剔除错误原子,提高重构精度。但是该算法步长不变,实际重构过程中会对重构效率造成影响。因为步长对于逼近稀疏度至关重要,步长选择过小,迭代次数增加,影响稀疏度的逼近过程。SAMP-PVRB算法利用抛物线步长初始阶段变化率大于对数步长这一性质引入变步长思想 可改善SAMP-RB算法采用固定步长而存在的初始阶段逼近速度较慢,后期阶段逼近程度差的问题。
5) 正则化稀疏度变步长自适应匹配追踪(RSVssAMP)算法[18]
该算法相比于传统的贪婪算法,除了可以自适应估计稀疏度之外,还可以重构的过程中正则化以更加精确的选取原子加入支撑集中,并利用双重阈值实现步长的自适应变化,达到大步长快速接近、小步长精确逼近。使重构信号与真实值更加逼近,进一步提高重构精度。RSVssAMP算法特别适用于对重构精度和重构速度要求较高的情况,具有非常重要的应用价值。
除了上述几种改进算法,正则化自适应匹配追踪(RAMP)算法[19]则是在ROMP算法正则化的基础上,结合了SAMP算法自适应思想,实现了在未知稀疏度的前提下步长逐步逼近K进而精确重建出原始信号的目的;基于分段正则化子空间追踪(SRSP)算法[20]综合StOMP算法的时间复杂度特性、ROMP算法重构速度和SP算法重构精度的优点,对图像重构效果比较理想,图像细节和图像的连续性都保持较好,与 MP、OMP、StOMP、CoSaMP和SP算法的重构性能相比,重构时间最低,重构图像的Match和PSNR值高于其他算法;分步子空间追踪的稀疏信号恢复方法(SSP)[21]则是结合了StOMP 算法的寻找支撑集原子的低时间复杂度和SP算法在重构信号时的高重构精度。
2.2 凸优化算法
基追踪(BP)算法具有全局最优的特征,因此算法的重构精度较高。但由于受到自身结构限制,重构时间较长,尤其在处理大尺寸结构时更为明显。梯度投影法是从可行性点出发,沿着下降方向进行可行性搜索,以此求出新的可行性点使目标函数值降低。梯度投影算法简单易用,图像重构效果比较好,尤其是对稀疏度较高的图像在较低的采样率下就可以较清晰的重构出目标图像,并且有着较快的运行速度。缺陷在于在较低测量率的情况下,重构的图像质量急剧下降。最小全变分法是从自然图像的离散梯度基本都是稀疏的角度出发,提出的一种更适合二维图像重构的算法。目前,在压缩编码孔径成像领域应用较广泛是事梯度投影法和最小全变分算法。
为了客观的分析比较各凸优化算法的性能,各类凸优化算法的优劣势如表2所示。
典型凸优化算法的优化方法:
1) 拟牛顿法引入投影算法(CGSR-QN)[27]
针对梯度投影法收敛速度慢、迭代次数多、对数据稀疏度过分敏感等问题。将拟牛顿法引入稀疏梯度投影算法以计算梯度下降方向,并利用拟牛顿法的估计校正机制以及全局超线性收敛性,通过对目标函数的校正,获得更精确的搜索方向,从而减少迭代次数,构成有效收敛的图像恢复算法。改进的算法在保证较好图像恢复效果的同时具有较好的抗噪性能,并且在减少迭代次数的基础上能有效降低重构误差,得到稳定收敛的重构结果。

表2 凸优化算法优劣势
2) TV minimization scheme based on augmented Lagranian and alternating direction algorithms算法[28]
最小全变分模型可以有效的解决图像压缩重构问题,重构结果精确并且鲁棒性较好,问题是重构速度较慢。为了弥补TV算法的不足,在最小全变分算法的基础上,加入增广拉格朗日和交替最小化方法提出TV minimization scheme based on augmented Lagranian and alternating direction algorithms算法,简称TVAL3算法。该算法使用增广拉格朗日形式对压缩感知图像复原问题进行转化,并采用交替方向方法寻找最优解。由于TVAL3算法利用图像的二维梯度求解,能较好的保持图像原来的轮廓,而可以得到较好的图像重建效果。同时,为了加快重构速度,TVAL3算法采用一步梯度下降方法迭代,理论上大大减少算法运行时间。
3) 二维梯度投影算法及其优化算法
二维梯度投影追踪(2-Dimensional Projected Gradient,2DPG)[29]是一种基于全变分正则化的压缩感知重构算法,由迭代投影和双变量阈值收缩两部分构成,是建立在二维观测模型下对图像直接进行压缩重构的新型算法,与一维压缩重构算法相比可以更好的保留图像细节信息。该算法利用两个互不相关的观测矩阵同时对图像信号的行与列观测,很好的保留了图像块之间的结构相似性,有利于提高重构质量。针对2DPG算法受阈值参数影响较大提出自适应二维梯度投影重构算法(A-2DPG)[30],阈值参数可以随着图像特征的不同进行自适应调整;针对2DPG算法中利用梯度下降法估计最小TV解时需要人工设置步长提出基于回溯线搜索的2DPG追踪 2DPG-BTLS算法[31];针对梯度下降法线性收敛速度较慢、鲁棒性差的问题,提出基于BB[32]步长搜索的二维梯度投影追踪算法[31]。
目前,贪婪算法中应用较为广泛的是OMP算法及其改进算法,其优势在于降低了重构算法的计算复杂度,缺点在于需要较多的观测次数,对维数较低的小尺度信号重构问题重构速度较快[33]。对于存在噪声的大尺度信号所需的观测次数较多,并且随着稀疏度的降低重构速率也不断下降,重构精度较差;凸优化算法重构图像所需观测次数较少,重建图像的能力较强,但计算复杂度相对较高、耗时较长。其中梯度投影算法应用较多,虽然该算法在重构速度上优势明显,但重构精度有所欠缺。最小全变分算法重构精度高,对图像轮廓的恢复效果较好,并且对噪声具有较高的鲁棒性。 为了更好的说明各算法的重构性能,选用典型的SP算法、OMP算法和最小全变分算法进行仿真实验分析。
3 性能分析
上文中对各种重构算法进行了介绍,为了直观说明各算法的性能,本节针对贪婪算法中的OMP算法、SP算法和凸优化算法中的TVAL3算法性能进行仿真分析。以MATLAB 2012a作为仿真实验平台,高斯随机矩阵作为测量矩阵,选取256*256的 Lena、Cameraman和Barbara图像作为测试图像,其中Lena图像纹理结构较为简单,Barbara图像纹理结构较复杂,Cameraman图像介于两者之间。实验通过在不同测量率下对3幅测试图像进行重构,以重构错误率、峰值信噪比PSNR值以及重构时间作为衡量标准。SP算法、OMP算法和TVAL3算法在测量率为0.1、0.3和0.5时对Lena图像的重构结果如图2、图3和图4所示。
根据以上仿真实验结果,直观上看,TVAL3算法的重构效果更好,并且在较低的测量率下就可较为清晰的重构出目标图像。为了量化表达结果,客观的分析各算法的重构性能,在不同测量率下个图像的重构图像PSNR值和重构错误率和重构时间如表3所示。
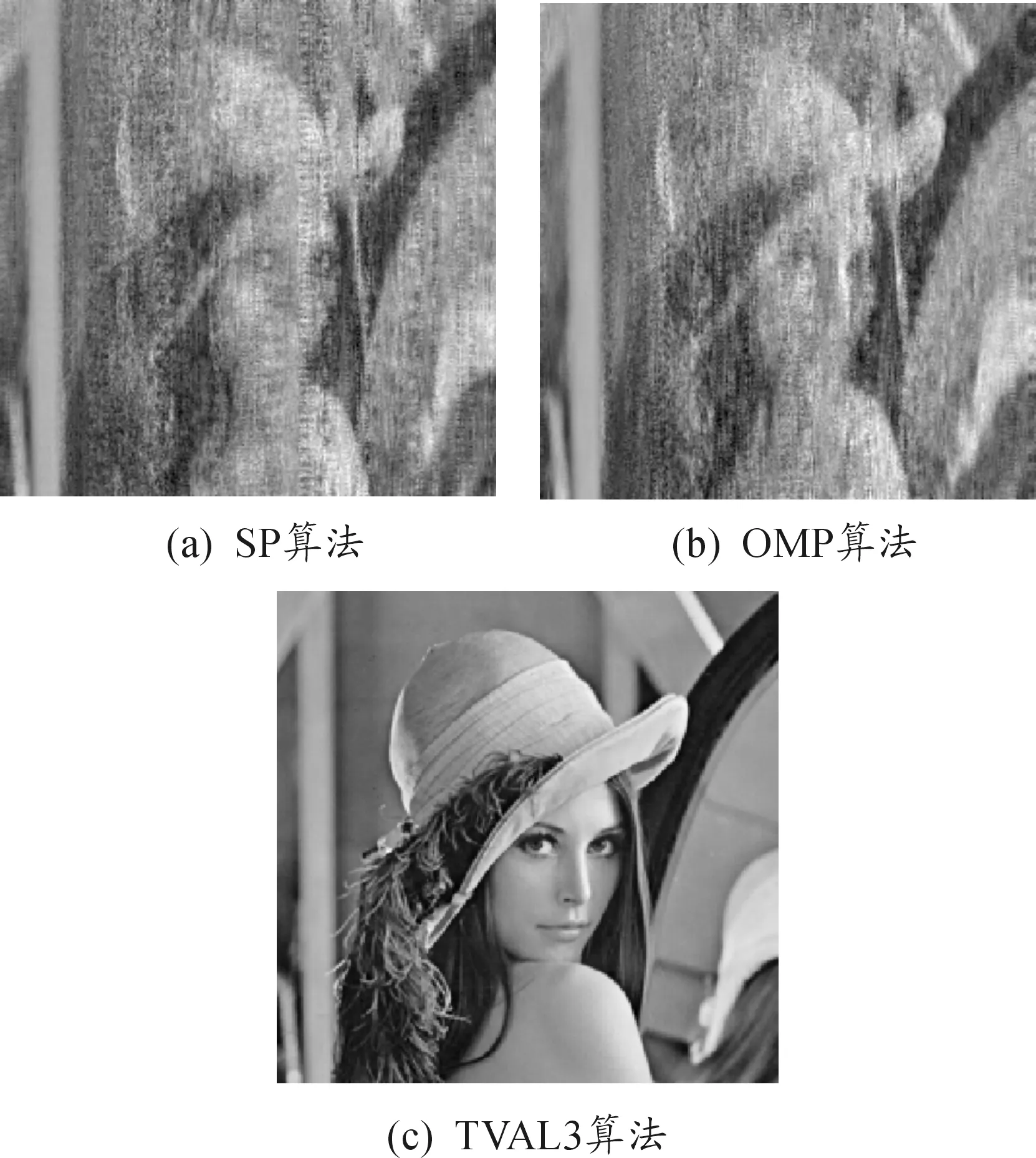
图2 测量率为0.1时重构结果
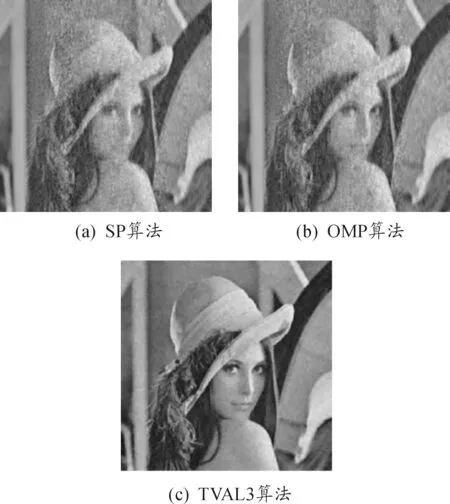
图3 测量率为0.3时重构结果

测量率SPPSNR错误率/%时间/msOMPPSNR错误率/%时间/msTVAL3PSNR错误率/%时间/ms0.120.3716.721.0020.6315.450.2531.145.034.520.325.1710.014.6825.299.871.3732.164.479.830.528.776.6112.5427.757.432.1132.314.4015.83
通过分析对比SP、OMP、TVAL3算法在不同测量率下的重构图像峰值信噪比以及重构错误率可知:在相同测量率下TVAL3算法的重构图像PSNR值最高,并且错误率最低,重构图像的效果最好,而且在测量率为0.1时就可以较清晰的重构出目标图像。而SP算法和OMP算法在低测量率下PSNR值非常低,重构错误率较高。随着测量率的提高,PSNR值有较大的提升,错误率有较大的降低。而TVAL3算法重构性能较为稳定,随着测量率提高,PSNR值增加幅度较小,在测量率为0.5左右时,SP算法与OMP算法重构结果与TVAL3算法较为接近。总而言之,TVAL3算法重构效果更好,优势较为明显,可作为重构算法的研究重点。
4 结论
压缩编码孔径成像技术,是国内外研究的热点。尤其在军事上对目标识别、景象记录、高分辨率成像以及图像的快速传输和实时处理等方面具有重要的应用价值。无论是贪婪算法还是凸优化算法,各算法的稳定性和适应性较差,重构结果受编码方式和目标特性的影响较大,只有在特定的目标场景和观测条件下才能获得较好的重建效果。如何构造更稳定、计算复杂度低且需要较少观测次数的重构算法是一个重要的研究方向。另外,现有的重构算法其数学模型都是在无噪声场景构建的[34],但在实际观测过程都会引入噪声。因此,在考虑噪声的情况下以及针对不同噪声类型构建不同的重构方法,对提高重构图像的分辨率具有重大的现实应用价值。
[1] BARANIUK R.Compressive Sensing[J].IEEE Signal Proc Mag,2007,24(4):118-121.
[2] GOYAL V,FLETCHER A,RANGAN S.Compressive Sampling and Lossy Compression[J].IEEE Signal Proc Mag,2008,25(2):48-56.
[3] MARCIA R,WILLETT R.Compressive Coded Aperture Superresolution Image Reconstruction[C]//Proc of IEEE Int Conf Acoust.Speech,Signal Processing,2008.
[4] MARCIA R F,HARMANY Z T,WILLETT R M.Compressive Coded Apertures for High-resolution Imaging[J].Proceedings of SPIE-The International Society for Optical Engineering,2010,7723(1):32-35.
[5] 钟宬.光学压缩编码超分辨率成像方法研究[D].西安:西安电子科技大学,2013:21-23.
[6] 李博.压缩感知理论的重构算法研究[D].长春:吉林大学,2013.
[7] MA J,LE DIMET F X.Deblurring From Highly Incomplete Measurements for Remote Sensing[J].IEEE Transactions on Geoscience and Remote Sensing,2009,47(3):792-802.
[8] CANDES E J,TAO T.Near-optimal Signal Recovery from Random Projections:Universal encoding strategies?[J].IEEE Transactions on Information Theory,2006,52(12):5406-5425.
[9] DONOHO D L,TSAIG Y,DRORI I,et al.Sparse Solution of Underdetermined Systems of Linear Equations by Stagewise Orthogonal Matching Pursuit[J].IEEE Transactions on Information Theory,2012,58(2):1094-1121.
[10] NEEDELL D,VERSHYNIN R.Signal Recovery from Incomplete and Inaccurate Measurements Via Regula-rized Orthogonal Matching Pursuit[J].IEEE Journal of Selected Topics in Signal Processing,2010,4(2):310-316.
[11] DO T T,GAN L,NGUYEN N,et al.Sparsity Adaptive Matching Pursuit Algorithm for Practical Compressed Sensing[C]//IEEE 42nd Asilomar Conference on Signals,Systems and Computers,2008:581-587.
[12] 田金鹏,刘小娟,刘燕平,等.多候选集广义正交匹配追踪算法[J].应用科学学报,2017,35(2):233-243.
[13] 牛亚坤,玉振明,李陶深,等.一种压缩采样硬阈值追踪压缩感知重构算法[J].计算机应用研究,2015,32(8):2286-2288.
[14] 倪加明,孙钦者,陆家明.一种改进的稀疏度自适应压缩采样匹配追踪算法[J].通信技术,2016,49(8):992-996.
[15] 陈艳良,战荫伟.贪婪重构算法StOMP及其改进[J].计算机应用与软件,2016,33(4):258-261.
[16] KENNEDY J,EBERHART R.Particle Swarm Optimization[M].Springer US,2011.
[17] 杜秀丽,胡兴,顾彬彬,等.基于变步长的正则回溯SAMP压缩感知重构算法[J].计算机应用研究,2016,35(4):21-25.
[18] 刘浩强,赵洪博,冯文全.基于CS的正则化变步长自适应匹配追踪算法[J].北京航空航天大学学报,2017(11):112-116.
[19] 刘亚新,赵瑞珍,胡绍海,等.用于压缩感知信号重建的正则化自适应匹配追踪算法[J].电子与信息学报,2010,32(11):2713-2717.
[20] 杨柳.基于压缩感知图像重构算法研究[D].湘潭:湘潭大学,2016:37-38.
[21] 谢井雄.压缩感知关键技术及其在图像处理中的应用研究[D].湘潭:湘潭大学,2015:43-46.
[22] 陈善培.压缩感知及其算法的研究[D].南京:南京邮电大学,2014.
[23] CHEN S S,DONOHO D L,SAUNDERS M A.Atomic Decomposition by Basis Pursuit[J].SIAM Review.2001,43(1):129-159.
[24] SEUNG-JEAN K,KOH K,LUSTIG M,et al.Gorinevsky D..An Interior-Point Method for Large-Scale l1-Regularized Least Squares[J].IEEE Journal of Selected Topics in Signal Processing,2007,1(4):606-617.
[25] FIGUEIREDO M A T,NOWAK R D.Wright.Gradient Projection for Sparse Reconstruction:Applicationto Compressed Sensing and other Inverse Problems[J].IEEE Journal of Selected Topics in Signal Processing.2007,1(4):586-598.
[26] CANDES E J,ROMBERG J,TAO T.Robust Uncertainty Principles:Exact Signal Reconstruction from Highly Incomplete Frequency Information[J].Information Theory,IEEI Transaction on,2006,52(2):489-509.
[27] 史久根,吴文婷,刘胜.基于压缩感知的图像重构算法[J].计算机工程,2014(2):229-232.
[28] 曾潇.基于压缩感知的单像素视频采样关键技术研究及实现[D].广州:华南理工大学,2015.
[29] CHEN G,LI D,ZHANG J.Iterative Gradient Projection Algorithm for Two-dimensional Compressive Sensing Sparse Image Reconstruction[M].Elsevier North-Holland,Inc,2014.
[30] 万成宏.图像压缩感知重构算法研究[D].广州:华南理工大学,2016:12-20.
[31] 潘金凤.压缩感知重构技术研究[D].北京:中国科学院研究生院(西安光学精密机械研究所),2015:36-42.
[32] 汪峰坤,张婷婷.一种改进的关联规则并行算法[J].重庆工商大学学报(自然科学版),2016,33(3):47-50.
[33] 许晓锋.光学压缩编码成像及其复原算法研究[D].西安:西安电子科技大学,2011:18-21.
[34] 王星元.改进的匹配追踪类算法研究[D].北京:中国科学技术大学,2015:74.
CalibrationofReconstructionAlgorithmforCompressiveCodedApertureImaging
GAO Yuxuan, SUN Huayan, ZHANG Tinghua, DU Lin
(Institute of Photo-Electricity Equipment, Academy of Equipment of PLA, Beijing 101416, China)
The existing optical imaging equipment is susceptible to target characteristics, weather, imaging system and other factors. Compressive coding aperture technology, as a new type of imaging system, could break through the imaging detector limit, and realize the super-resolution imaging. The imaging system mainly uses the sparseness of the image, and reconstructs the mathematical model by reconstructing the algorithm, and then reverts the target image with high resolution. The reconstruction algorithm is a critical step in compressed coded aperture imaging to a certain determines the quality of the reconstructed image. The existing compression coding aperture imaging reconstruction algorithm is classified and summarized, which can provide reference for research of this field for the future.
compressive coded aperture; reconstruction algorithm; super-resolution imaging
2017-05-25;
2017-06-20
高宇轩(1993—),女,硕士研究生,主要从事压缩编码成像技术研究。
10.11809/scbgxb2017.10.039
本文引用格式:高宇轩,孙华燕,张廷华,等.压缩编码孔径成像重构算法[J].兵器装备工程学报,2017(10):191-196.
formatGAO Yuxuan,SUN Huayan,ZHANG Tinghua,et al.Calibration of Reconstruction Algorithm for Compressive Coded Aperture Imaging[J].Journal of Ordnance Equipment Engineering,2017(10):191-196.
TN911.73
A
2096-2304(2017)10-0191-06
(责任编辑唐定国)
猜你喜欢
农业工程学报(2022年10期)2022-08-22
福建师范大学学报(自然科学版)(2022年2期)2022-03-16
成都信息工程大学学报(2021年5期)2021-12-30
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
西安邮电大学学报(2021年1期)2021-04-19
南京大学学报(数学半年刊)(2020年1期)2020-03-19
舰船电子对抗(2019年5期)2019-12-04
无线电通信技术(2019年4期)2019-06-25
上海师范大学学报·自然科学版(2018年3期)2018-05-14