西瓜基质栽培智能灌溉系统的研究
2017-11-06 00:32:59张清泉林卫国郑相周黄远徐张群
湖南农业大学学报(自然科学版) 2017年5期
张清泉,林卫国,郑相周*,黄远,徐张群
西瓜基质栽培智能灌溉系统的研究
张清泉a,林卫国a,郑相周a*,黄远b,徐张群a
(华中农业大学a.工学院;b.园艺林学学院,湖北武汉430070)
设计了一种基于ZigBee无线传感器网络的西瓜基质栽培智能灌溉系统。该系统由环境信息采集装置、信息处理系统和灌溉执行结构3部分组成。环境信息采集装置主要采集影响西瓜水分需求的基质相对湿度和空气相对湿度;信息处理系统对数据进行分析与处理,判断是否驱动灌溉执行机构对西瓜进行灌溉。综合考虑西瓜在不同生长阶段基质相对湿度、空气相对湿度对西瓜需水量的影响,建立了模糊控制规则库,利用MATLAB进行仿真,证明灌溉策略的有效性。结果表明,智能灌溉系统能根据智能灌溉策略适时、适量地进行灌溉,控制基质相对湿度与西瓜生长阶段相适应,伸蔓期将基质相对湿度控制在62.82%~67.25%,开花坐果期将基质相对湿度控制在68.05%~72.18%,膨瓜期将基质相对湿度控制在72.23%~77.15%,成熟期将基质相对湿度控制在58.36%~62.13%,所测得的基质相对湿度与最佳基质相对湿度之间的误差在2%左右,满足西瓜基质栽培的灌溉需求。
西瓜;基质栽培;智能灌溉;ZigBee;模糊控制
西瓜不同生育期的水肥组合[1]与不同频率的滴灌方式[2]对西瓜的产量、品质有明显影响。基质栽培是西瓜栽培的重要方式,通过控制基质中含水量的上限和下限来调节基质的相对湿度[3–4],智能化程度较低。近年来,ZigBee无线传感器网络技术与智能灌溉技术被应用到农业灌溉领域中,为智能灌溉提供了良好的思路与应用前景[5–9]。常用的智能灌溉控制是基于土壤水分偏差和偏差变化率的模糊控制[10–14]。由于西瓜对水分的需求不仅受生长发育的影响,还受基质相对湿度、空气相对湿度的影响较大[15]。笔者设计了一种基于ZigBee无线传感器网络的西瓜基质栽培智能灌溉系统。其中,ZigBee无线传感器网络实时监测西瓜生长的基质相对湿度和空气相对湿度,智能灌溉系统以西瓜定植时间为输入量,查询表格得出当前西瓜最佳基质相对湿度,以当前基质相对湿度与最佳基质相对湿度差值和本周期采集基质相对湿度与上周期采集的基质相对湿度差值为输入变量,建立模糊控制规则库,推理出灌溉时间,并判断当前空气相对湿度是否适合灌溉。现将结果报道如下。
1 系统总体结构及工作原理
基于ZigBee无线传感器网络西瓜基质栽培智能灌溉系统由环境信息采集装置、灌溉策略及上位机信息处理系统和灌溉执行机构3部分组成,如图1所示。

图1 系统的总体结构
环境信息采集装置通过ZigBee无线传感器网络由终端节点、路由节点、协调器节点完成信号的传递,实现环境信息的实时采集;信息处理系统由灌溉策略和上位机组成,对环境信息采集系统采集的数据进行分析和处理;灌溉执行机构由电磁阀组成,当西瓜需要补充水分时,信息处理系统驱动电磁阀对西瓜进行灌溉。
ZigBee无线传感器网络拓扑结构分为星型拓扑结构、树型拓扑结构、网状拓扑结构。为了增加系统的稳定性,加大信号的传输距离,采用网状网络拓扑结构。将少量传感器节点充当路由,完成数据采集并接收其他传感器节点采集的数据发送给协调器,大部分传感器作为终端节点,只采集数据并发送给附近的路由或协调器,降低节点的能耗和节约成本。
2 环境信息采集装置
选用JZH–004采集基质相对湿度;JZH–021采集空气相对湿度;无线控制模块为JZH–211,4路继电器输出,控制电磁阀的通断;协调器为KL–H1100,管理由各传感器组成的ZigBee无线传感器网络。JZH–021有路由功能,采集空气相对湿度,同时接收附近其他传感器采集的数据并发送给协调器。JZH–004、JZH–021、JZH–211和KL–H1100共同完成基质相对湿度和空气相对湿度数据的采集。
终端节点和路由节点模块由8051处理器和无线通信等模块组成,如图2所示。CC2530内置有业界标准的增强型 8051CPU,系统内可编程闪存。在网络节点硬件平台中,CC2530需要通过A/D转换控制传感器模块进行数据采集,控制无线 RF 模块并完成数据收发。
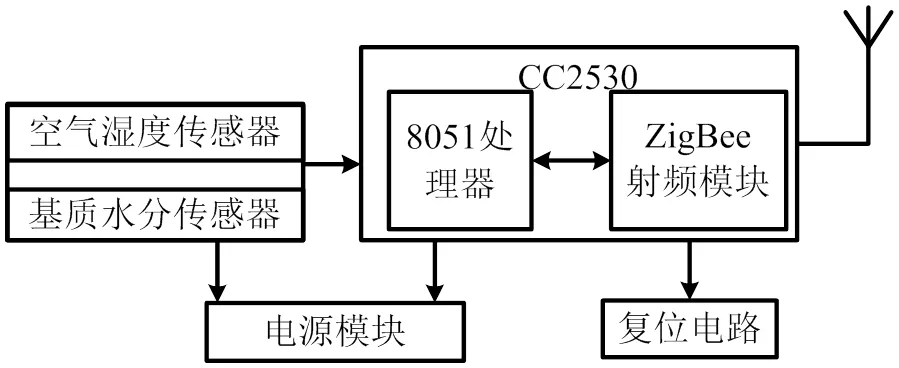
图2 终端节点和路由节点
协调节点由CC2530射频模块和S3C2416处理器组成。CC2530芯片作为协调节点的微控制器,配置相应的ZigBee射频模块,通过建立网络管理终端节点,同时接收终端节点和路由节点发送的数据。S3C2416 处理器负责显示、存储、控制算法的执行及通讯功能,协调器通过Modbus TCP协议与上位机通讯。
3 信息处理系统的设计
3.1 智能灌溉的结构设计
据宋羽等[16]的研究结果,以西瓜品种‘早佳8424’为例,各生长阶段最佳基质相对湿度分别是苗期70%~80%,伸蔓期60%~70%,开花坐果期65%~75%,膨瓜期70%~80%,成熟期55%~65%。西瓜基质栽培灌溉管理是一个复杂的过程[17],如图3所示。西瓜基质栽培智能灌溉系统设计为二级推理机制:第一级推理以西瓜定植时间为输入量,输出量为最佳基质相对湿度;第二级推理以当前基质相对湿度与最佳基质相对湿度差值和本周期采集的基质相对湿度与上周期采集的基质相对湿度差值为输入变量,经过模糊推理,输出灌溉时间,通过控制灌溉时间来调节基质相对湿度。由于西瓜生长要求空气相对干燥,适宜的空气相对湿度为60%左右,若空气相对湿度超过80%,则西瓜生长瘦弱,坐果率低,品质差[18–20]。当空气相对湿度过高时灌溉,会诱发多种病虫害,严重影响西瓜的产量和品质,因此空气相对湿度高于80%时不适合灌溉。
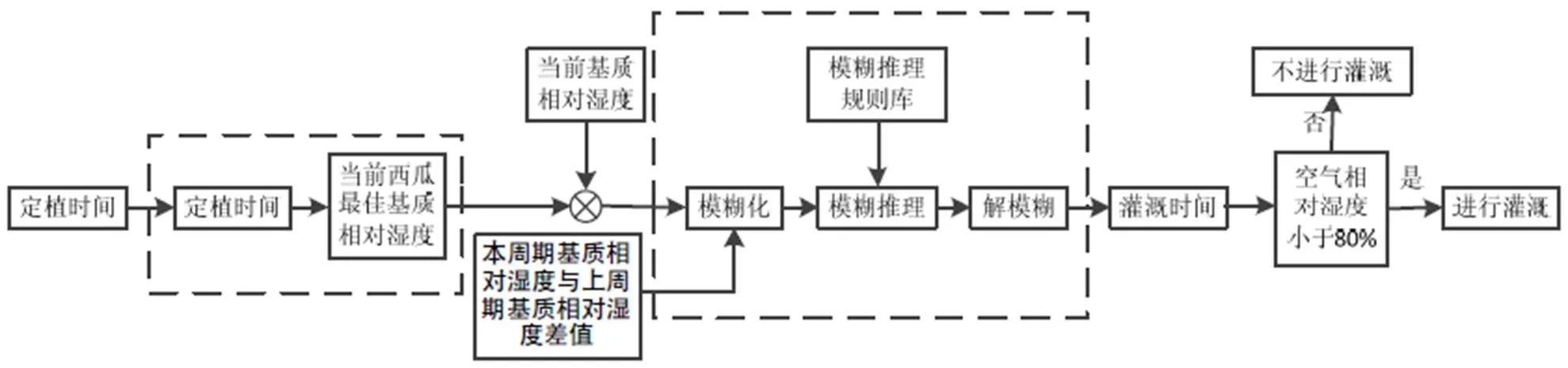
图3 西瓜智能灌溉系统结构框图
3.2 第一级推理
西瓜在不同生长阶段的基质相对湿度是一个较大的范围,定义最佳基质相对湿度为此范围的中间值,故西瓜在苗期、伸蔓期、开花坐果期、膨瓜期、成熟期所对应最佳基质相对湿度分别为75%、65%、70%、75%、60%。西瓜苗期在温室集中培养,定植当天记为第1天,西瓜进入伸蔓期,根据西瓜不同生长阶段的生长周期推理出当前最佳基质相对湿度。
3.3 第二级推理
第二级推理以当前基质相对湿度与最佳基质相对湿度差值()和本周期采集的基质相对湿度与上周期采集的基质相对湿度差值()为模糊输入变量,经过模糊推理,输出灌溉时间。西瓜在不同生长阶段适合生长的基质相对湿度上限与下限的差值均为10%,最佳基质相对湿度为上限与下限的中间值,故选取的实际论域为[–5%,5%],使得基质相对湿度的实际变化范围在适合西瓜生长的基质相对湿度范围内。通过多次试验测得本周期采集的基质相对湿度与上周期采集的基质相对湿度的差值均在5%以内,所以选取的实际论域为[–5%,5%]。西瓜整个生育期基质相对湿度的变化范围为[55%,80%],由试验测得基质相对湿度从55%增大到80%大约需要30 min,故的实际论域为[0,30]。
在模糊控制中,输入、输出变量用模糊语言描述,系统用来描述输入变量和的语言变量相同,均为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB) 7个语言变量,量化论域为{–3,–2,–1,0,1,2,3}。由于灌溉时间为非负数,的语言变量为不灌溉(ZO)、短时间灌溉(PS)、中等时间灌溉(PM)、长时间灌溉(PB),量化论域为{0,1,2,3}。
量化因子k和k及比例因子k由输入、输出变量的实际论域和量化论域[21]确定。经计算,k=0.6,k=0.6,k=600。考虑到计算方便,输入变量、和输出变量的隶属度函数均采用对称三角形[8,22]。
由专家经验可知,当前基质相对湿度与当前最佳基质相对湿度的差值较大时,西瓜需水量大;本周期采集的基质相对湿度比上周期采集的基质相对湿度较高或较低时,西瓜的需水量也受到影响。输入变量和均有7个语言变量,通过排列组合得到49条控制规则,列于表1。

表1 第二级推理规则

4 MATLAB仿真与试验分析
4.1 MATLAB仿真
采用MATLAB语言编制程序,在模糊逻辑编辑中添加已定义输入输出语言变量,以及它们的模糊子集,完成各个变量的隶属度函数的编辑。打开曲面观测器,观察输入输出控制曲面,如图4所示。控制曲面呈非线性,说明模糊控制本身也是非线性的。当和的值越小时,西瓜的需水量就越大;和值越大时,西瓜的需水量越小。当2个输入变量取不同的值时,系统根据重心法求出输出变量的值,比如当=–2.58,=–1.63时,相应的输出结果=2.17,乘以比例因子600,则输出的灌溉时间为1 302 s。
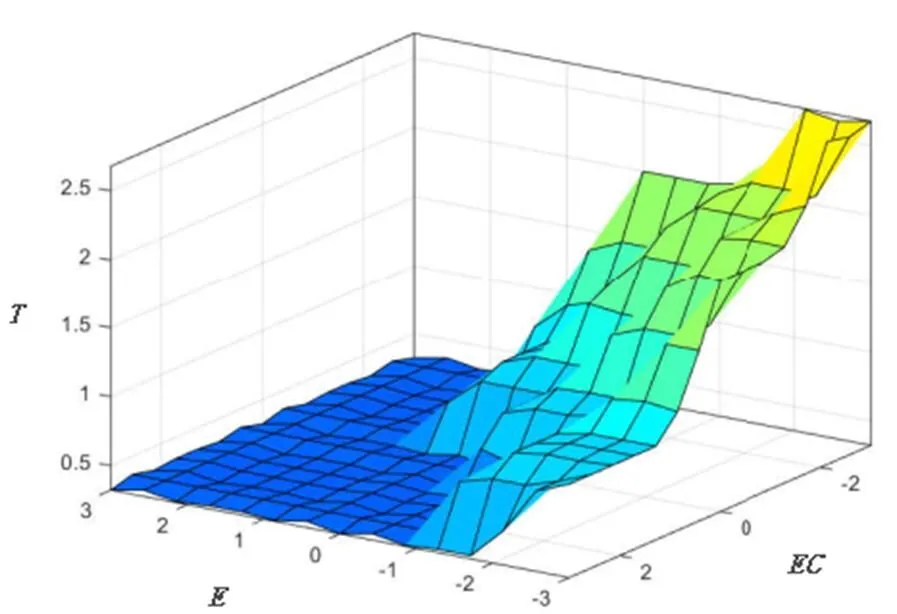
图4 输入输出控制曲面
4.2 试验验证
为了测定智能灌溉系统的稳定性,在华中农业大学国家蔬菜改良中心华中蔬菜分中心大棚进行试验。将基质相对湿度传感器、空气相对湿度传感器和协调器安装到大棚中,每5 min采集1次数据。上位机接收协调器发送的数据,通过设计的灌溉策略推理出电磁阀的通断时间,从而调节基质相对湿度。测试智能灌溉系统在西瓜不同生长阶段的基质相对湿度,协调器将接收到的数据发送给上位机,绘制其数据曲线,如图5所示。
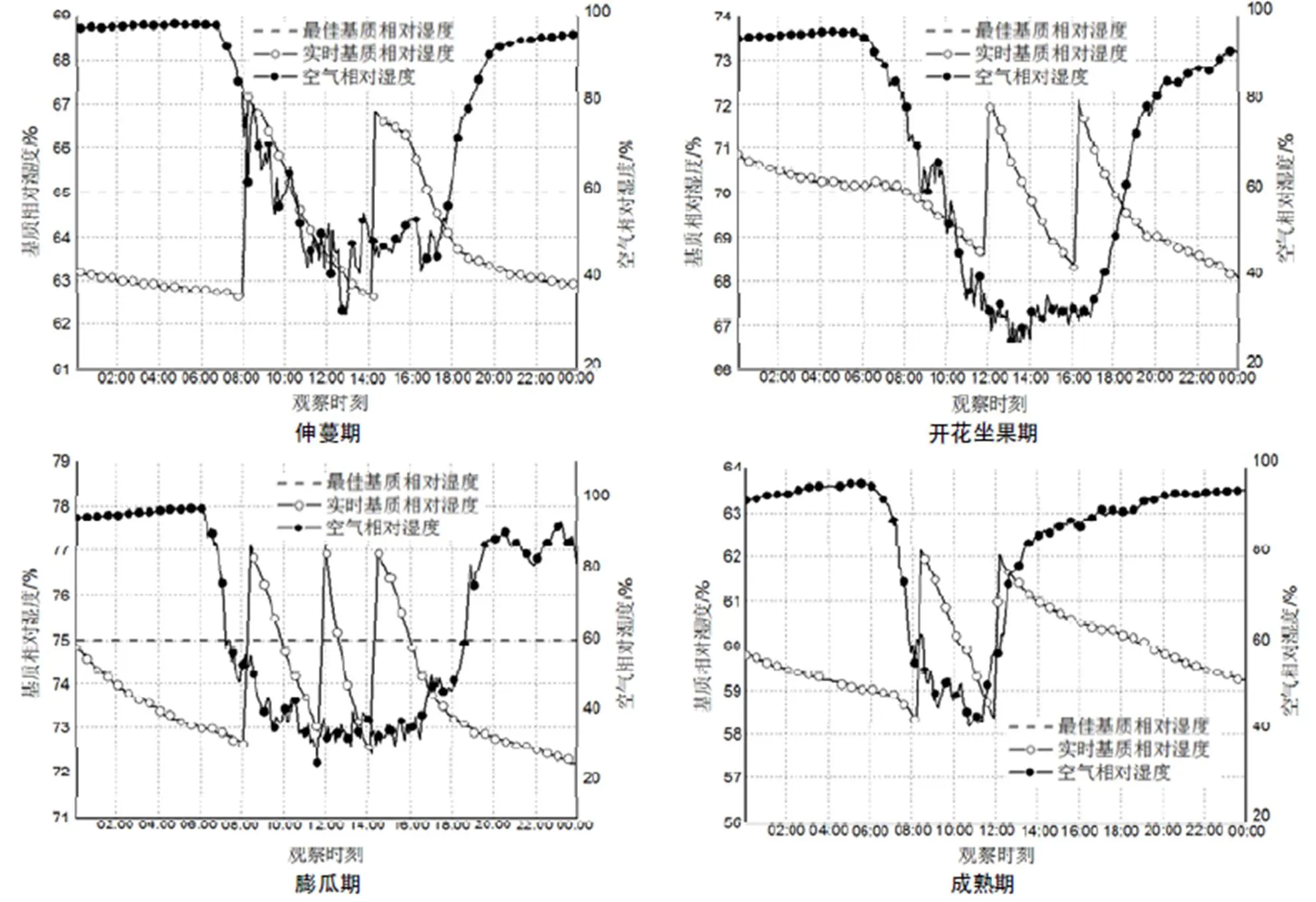
图5 西瓜不同生长阶段的基质相对湿度
图5表明,西瓜伸蔓期最佳基质相对湿度为65%,当天灌溉2次,在08:05时基质相对湿度最大,为67.25%,在14:20时,基质相对湿度最小,为62.85%。开花坐果期最佳基质相对湿度为70%,当天灌溉2次,在16:15时基质相对湿度最大,为72.18%,在00:00时基质相对湿度最小,为68.05%。膨瓜期最佳基质相对湿度为75%,当天灌溉3次,在08:20时基质相对湿度最大,为77.15%,在00:00时基质相对湿度最小,为72.23%。成熟期最佳基质相对湿度为60%,在08:10时基质相对湿度最大,为62.13%,在11:55时基质相对湿度最小,为58.36%。当空气相对湿度高于80%时,即使基质相对湿度较低,灌溉系统也未对西瓜进行灌溉。试验结果表明,智能灌溉系统能根据智能灌溉策略控制灌溉时间,及时调节西瓜基质相对湿度,控制基质相对湿度与西瓜生长阶段相适应,所测得的基质相对湿度与最佳基质相对湿度之间的误差约为2%,可满足西瓜基质栽培的需求。
[1] 杨小振,张显,马建祥,等.滴灌施肥对大棚西瓜生长、产量及品质的影响[J].农业工程学报,2014,30(7):109–118.
[2] 刘炼红,莫言玲,杨小振,等.调亏灌溉合理滴灌频率提高大棚西瓜产量及品质[J].农业工程学报,2014,30(24):95–104.
[3] 李萍萍,刘志刚,王纪章.一种基质栽培作物的灌溉决策方法及灌溉系统:中国,103329780A[P].2013– 10–02.
[4] 杨平,陈锐,李杰,等.不同灌溉下限与营养液浓度对基质栽培番茄的影响[J].江苏农业科学,2017,45(5):126–129.
[5] DURSUN M,OZDEN S.A wireless application of drip irrigation automation supported by soil moisture sensors[J].Scientific Research & Essays,2011,6(7):1573–1582.
[6] SINGH S N,JHA R,NANDWANA M K.Optimal design of solar powered fuzzy control irrigation system for cultivation of green vegetable plants in Rural India[C]// International Conference on Recent Advances in Information Technology.IEEE,2012:877 – 882.
[7] 张伟,何勇,裘正军,等.基于无线传感网络与模糊控制的精细灌溉系统设计[J].农业工程学报,2009,25(S2):7–12.
[8] 张伶鳦,王润涛,张长利,等.基于调亏理论和模糊控制的寒地水稻智能灌溉策略[J].农业工程学报,2016,32(13):52–58.
[9] 牛寅,张侃谕.轮灌条件下灌溉施肥系统混肥过程变论域模糊控制[J].农业机械学报,2016,47(3):45–52.
[10] 谢守勇,李锡文,杨叔子,等.基于PLC的模糊控制灌溉系统的研制[J].农业工程学报,2007,23(6):208–210.
[11] 匡迎春,沈岳,段建南,等.模糊控制在水稻节水自动灌溉中的应用[J].农业工程学报,2011,27(4):18–21.
[12] 李聪聪,高立艾,李云亮.基于物联网技术和模糊控制的智能节水灌溉系统[J].节水灌溉,2013(12):83–86.
[13] 梁月云,崔天时,何亚非.温室节水灌溉系统模糊控制器设计及 MATLAB 仿真[J].农机化研究,2014,36(6):202–205.
[14] 钱稷,周娟,张广华,等.基于模糊控制的温室内土壤湿度智能监控系统设计[J].华中农业大学学报,2015,34(5):121–126.
[15] 孙静.基于模糊控制的智能灌溉系统的研究[D].济南:山东大学,2014.
[16] 宋羽,卢青成,王浩.适合新疆戈壁地区甜瓜穴盘育苗的基质相对含水量的探究[J].北方园艺,2014(9):53–55.
[17] 杜军志,张会梅,杨绒会.环境条件对西瓜生长发育的影响[J].中国瓜菜,2004(5):15–17.
[18] 张冬梅.大棚微型西瓜定植后的管理及病虫害综合防治[J].吉林蔬菜,2016(7):5–6.
[19] 陈亮.早熟西瓜大棚栽培温湿度特点及其管理技术[J].福建农业科技,2011(1):23–24.
[20] 汤谧,别之龙,张保才,等.西瓜、甜瓜果实品质及调控研究进展[J].长江蔬菜,2009(4):10–14.
[21] 孙增圻,邓志东,张再兴.智能控制理论与技术[M].2版.北京:清华大学出版社,2011.
[22] KASHIWAGI T,MADOKA Y,HIROTSU N,et al.Locus prl5 improves lodging resistance of rice by delaying senescence and increasing carbohydrate reaccumulation[J].Plant Physiology and Biochemistry,2006,44(2):152–157.
责任编辑:罗慧敏
英文编辑:吴志立
Study on the intelligent irrigation system of watermelon substrate cultivation
ZHANG Qingquana, LIN Weiguoa, ZHENG Xiangzhoua*, HUANG Yuanb, XU Zhangquna
(a.College of Engineering; b.College of Horticulture and Forestry Sciences, Huazhong Agricultural University, Wuhan 430070, China)
A watermelon cultivation of intelligent irrigation system was designed based on ZigBee wireless sensor network. The system is composed of environment information acquisition device, information processing system and irrigation implementation structure. The environmental information collection device collects the substrate relative humidity and air relative humidity of the watermelon moisture demand, and analyzes and processes the data in the information processing system to judge whether the irrigating agency is driving the irrigation. Considering the influence of substrate relative humidity and air relative humidity on the water demand of watermelon at different growth stages, a fuzzy control rule was established to test the validity by MATLAB simulation. The results showed that the intelligent irrigation system could be irrigated according to the intelligent irrigation strategy, and the substrate relative humidity of the substrate was compatible with the growth stage of watermelon. The substrate relative humidity was controlled at 62.82%–67.25% during the period of sprouting stage. The substrate relative humidity was controlled at 68.05%–72.18% during the period of flowering stage. The substrate relative humidity was controlled at 72.23%–77.15%during the period of expanding stage. The substrate relative humidity was controlled at 58.36%–62.13% during the period of maturing stage. An error of 2% was obtained between the measured optimum substrate relative humidity at a substrate relative humidity, which meet the needs of watermelon cultivation substrate.
watermelon; cultivation substrate; intelligent irrigation; ZigBee; fuzzy control
S274.2
A
1007-1032(2017)05-0560-05
2017–02–20
2017–06–28
国家自然科学基金项目(51305152);中央高校基本科研业务费专项基金(2662015PY078);青海省重点研发与转化计划科技合作专项(2016–HZ–818);湖北省科技支撑计划项目(2015BKA349)
张清泉(1991—),男,湖南娄底人,硕士研究生,主要从事农业电气化与自动化研究,zhqingquan1992@163.com;*通信作者,郑相周,副教授,主要从事农业电气化与自动化研究,zhxhzcn@163.com
投稿网址:http://xb.hunau.edu.cn
猜你喜欢
湖北农机化(2020年4期)2020-07-24 09:07:14
小天使·一年级语数英综合(2019年3期)2019-04-19 01:36:34
电子制作(2018年23期)2018-12-26 01:01:10
通信电源技术(2018年3期)2018-06-26 08:06:18
小天使·一年级语数英综合(2017年6期)2017-06-07 00:02:16
文理导航·趣味课堂(2016年6期)2016-09-09 16:43:12
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38