电动汽车CAN总线多渠道解析方法
2017-11-06 07:25张永生杨欣茹
汽车工程学报 2017年5期
张永生,关 静,杨欣茹
(中国汽车工程研究院,重庆 401122)
电动汽车CAN总线多渠道解析方法
张永生,关 静,杨欣茹
(中国汽车工程研究院,重庆 401122)
为了解电动汽车动力总成的工作特性,借鉴其控制原理,对比和掌握其整车控制策略,提出了CAN总线数据的多渠道解析思路和方法。基于该方法分析了某混合动力电动汽车的基本特征和工作模式,制定了特定解析工况和CAN总线数据之间的关联表,并验证了该解析方法的有效性和可行性,对实际电动汽车测试评价有一定的参考价值。
电动汽车;CAN总线;关键控制信号;多渠道解析
随着电动汽车的推广和普及,其动力总成的构型及电控系统变得越来越复杂,不同控制器间传输的数据量成倍增加。为减少控制器间线束的数量和种类,提升控制器间数据的传输效率,总线技术在电动汽车上得到了大规模应用。
混合动力汽车分为插电式和增程式。作为电动汽车的重要组成部分,整车控制系统需要根据不同的道路环境工况和驾驶意图,协调控制发动机、电机和电池等部件的工作状态,使它们在综合考虑能量经济性和整车动力性的控制策略下切换工作模式,实现节能与减排,这也对整车控制系统软硬件的开发提出了更高的要求[1]。
为了测试评价目前市场上主流的电动汽车,了解动力总成关键部件的工作特性,学习和借鉴其先进的控制原理以及对其整车控制策略进行对比分析,需要对目标车型的CAN总线拓扑和关键信号进行解析,以便为观测整车及部件的实时运行状况作铺垫。本文以某混合动力车型为例,利用CAN总线数据多渠道融合校核和验证方法,获取了相关关键信号,并验证了该解析方法的可行性。
引用格式:
1 某混合动力电动汽车概述
目前混合动力汽车主要可分为串联、并联和混联三种典型结构。某混合动力汽车采用并联式结构,是中度油电混合动力电动汽车,配置了1.3 L主动力发动机和15 kW辅助动力电机,且发动机和IMA电机同轴连接,其动力传动系统采用了CVT无级变速器结构。
该混合动力汽车与其它类型混合动力汽车相比,拥有自己的特色:(1)以汽油发动机为基础,电力发动机为辅。(2)相比较而言,该种结构对于车身的改动较小,比较容易实现产业化。其混合动力系统拓扑结构如图1所示。
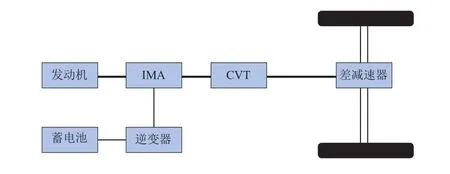
图1 某混合动力系统拓扑结构
分析某混合动力汽车的结构特点,以及查阅相关说明文件,了解到该混合动力汽车除具备实现怠速启停、加速助力、制动能量回收等3大混合动力系统标志性功能外,还可实现短暂的IMA巡航功能,即在保持一定驾驶速度的状态下,汽油发动机“滑行”,车辆仅由IMA电机提供动力[2-4]。其整车工作模式如图2所示。

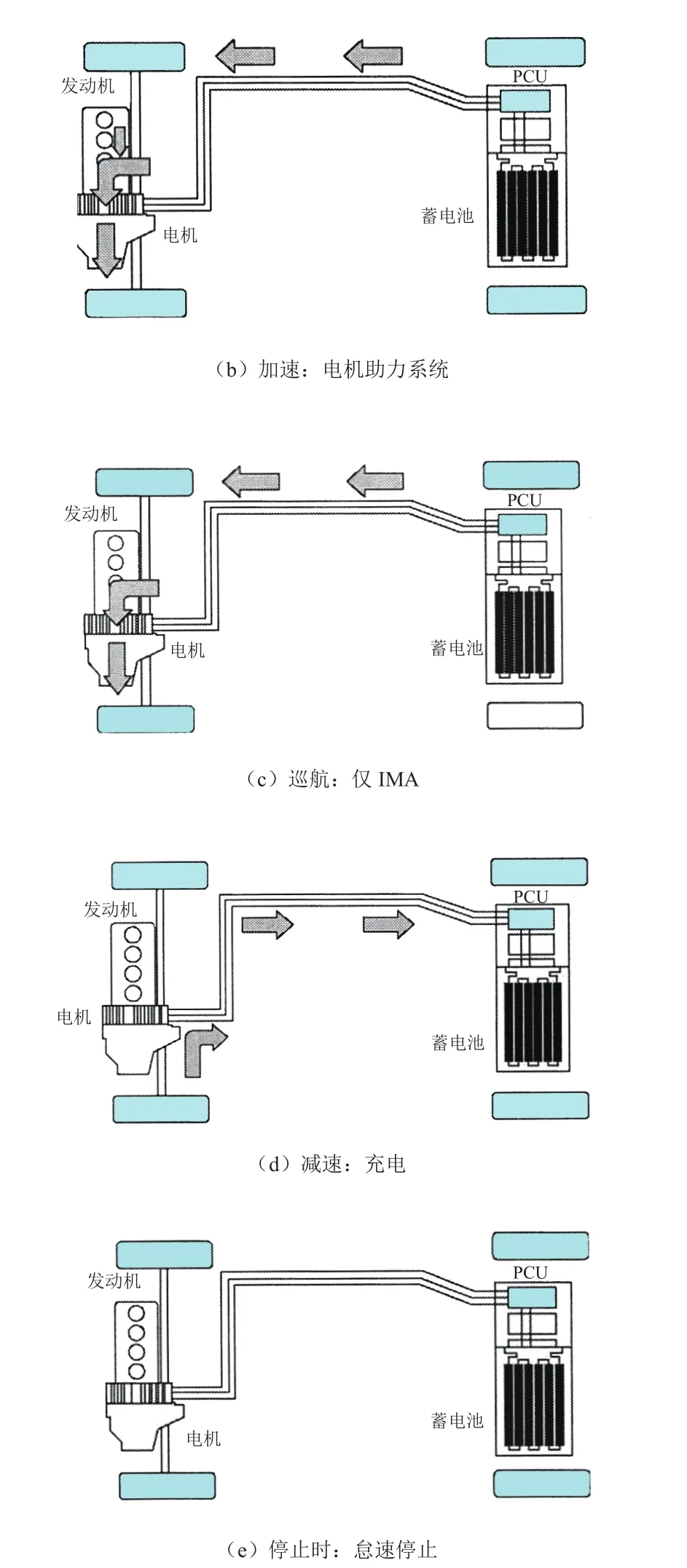
图2 混合动力整车工作模式示意图
2 混合动力系统CAN总线多渠道解析方法
分析某混合动力汽车整车以及关键零部件的工作模式,搭建包含混合动力汽车、随车诊断仪、CANoe分析软件[5]、多路数据采集系统[6]、以及必要的测试道路条件等试验环境的CAN总线分析平台。某混合动力系统CAN总线多渠道解析技术路线如图3所示。
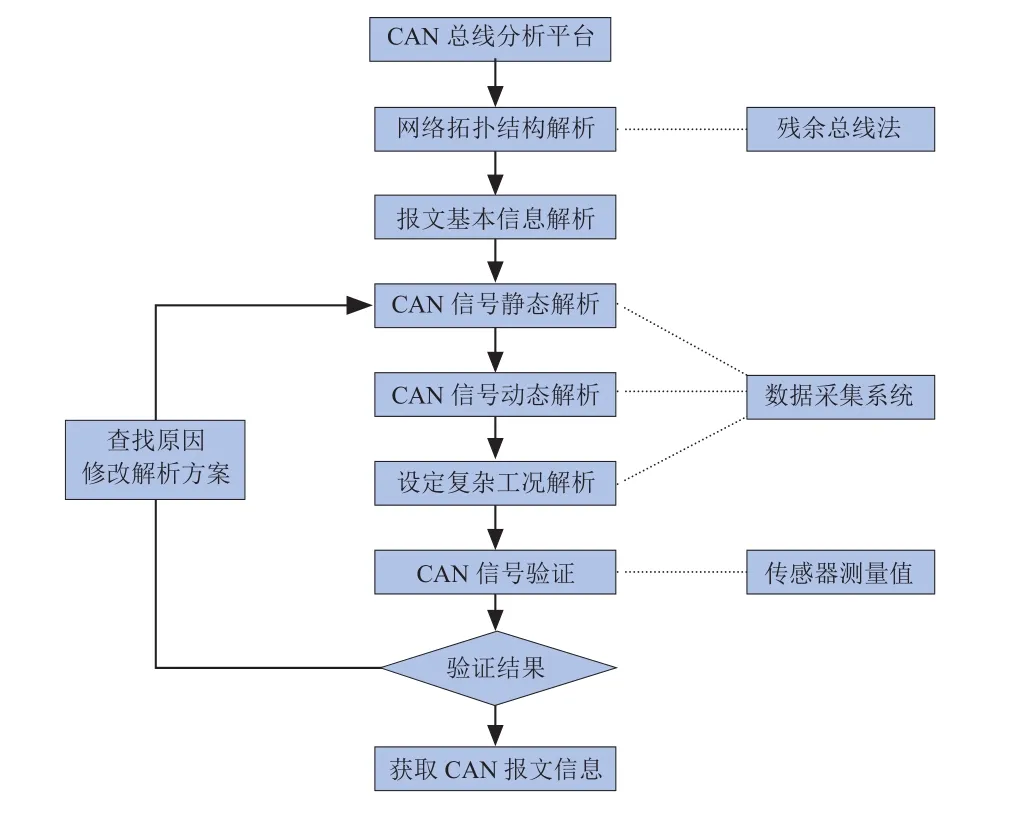
图3 混合动力系统CAN总线多渠道解析技术路线
2.1 网络拓扑结构解析
分析网络结构和网络节点。应用残余总线法,将一个完整的网络中部分节点连接断开或者采用其它可控方式进行模拟,对网络中“残余”部分进行操作,可以验证网络结构,分析出网络节点。该阶段解析的主要内容包括CAN总线节点布局、网络通讯速率和终端电阻分布等信息。
2.2 报文基本信息解析
分析报文的基本属性,初步遴选出关键报文。该阶段解析的主要内容包括报文格式、报文标识符(ID)规则、报文数据长度和报文的传输(ECU地址、源地址、目的地址、收发方式、发送周期等)等信息。
2.3 CAN信号解析
该阶段解析的主要内容包括信号结构、信号特征描述、数据长度、参数类型,信号的数值范围、比例系数和偏移量等。根据CAN信号解析的难易程度,分为静态解析和动态解析。
静态解析:在CAN总线分析平台上,控制混合动力汽车点火开关对整车及各控制ECU上电,对车辆静态下及简单驾驶员操作条件下的报文进行解析,主要针对踏板信号、挡位信号、电机电压和电池电压等易于解析的信号进行解析。
动态解析:控制混合动力汽车进行道路模拟试验,通过CAN总线分析平台对其工作状态下通讯的报文进行解析,主要针对车速信号、转速信号、电机电流、电池电流以及部分转矩信号等不易直接解析的信号进行解析。
2.4 设定复杂工况解析
在已经解析和验证了部分CAN总线关键控制信号的前提下,针对性地设计测试工况,对不易直接解析的特定信号进行解析和验证,这也是本文的核心部分。例如对于电机转矩信号的解析(图4),根据某混合动力汽车可以实现汽油发动机“滑行”,车辆仅由IMA电机提供动力的特点,设计进入一个只有IMA电机驱动的匀速试验工况,记录车速以及IMA电机转速、电流等信息。此外,根据车辆滑行试验曲线对应车速条件下的减速度数值,计算车辆在对应车速下的阻力功率,该阻力功率应该与电机的驱动功率近似相等,并据此计算出电机在该转速和电流条件下的转矩,与电机在静态条件下的0转矩进行比较,可以解析出电机转矩的信息(比例系数和偏移量等)。
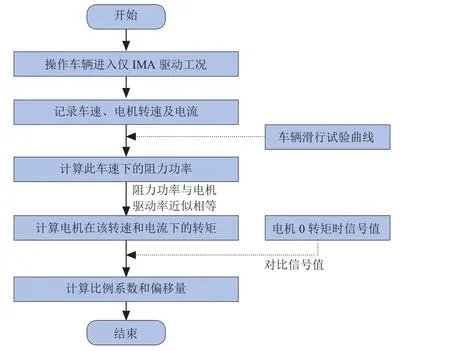
图4 电机转矩信号解析示意图
2.5 CAN信号验证
在CAN总线信号解析的过程中,通过将CANoe采集的信息与数据采集系统采集的信息,以及随车诊断仪或仪表显示的信息等进行对比,分析不同渠道采集数据的关联性,可以加快信号解析的进程,并对部分解析结果进行验证。以发动机转速信号为例,通过反复启动发动机,对报文的数据变化规律进行分析,初步确定,在ID为0x17D报文的bytes0-1位置对应的是发动机转速信号,计算发动机转速信号的公式为:

其中b0和b1分别为总线上传输的报文0x17D中第0字节和第1个字节的数值(转换为十进制),factor为比例系数,offset为该信号的偏移量。经过比对,确认发动机转速信号的比例系数为1,偏移为0,单位为r/min。
1.3.3 疗效判定 (1)痊愈标准:受损频率听阀重新回到患病前水平,或达到健耳水平,或恢复为正常;(2)显效标准:受损频率听力均值提升超过30 dB;(3)有效标准:受损频率听力均值提升15~30 dB;(4)无效标准:受损频率听力均值改善为15 dB以下。显效率为痊愈和显效患者合计数量与总入组数之比;有效率为痊愈、显效与有效三者患者合计数量同总入组数之比。
为了加快CAN总线关键控制信号解析和验证的进度,有必要建立各关键控制信号之间的关联度分析表,了解CAN信号之间的关系,尤其对于发动机转速和电机转速这种强相关信号,根据某混合动力汽车的结构型式,建立各关键控制信号之间的关联度分析表,见表1~3。
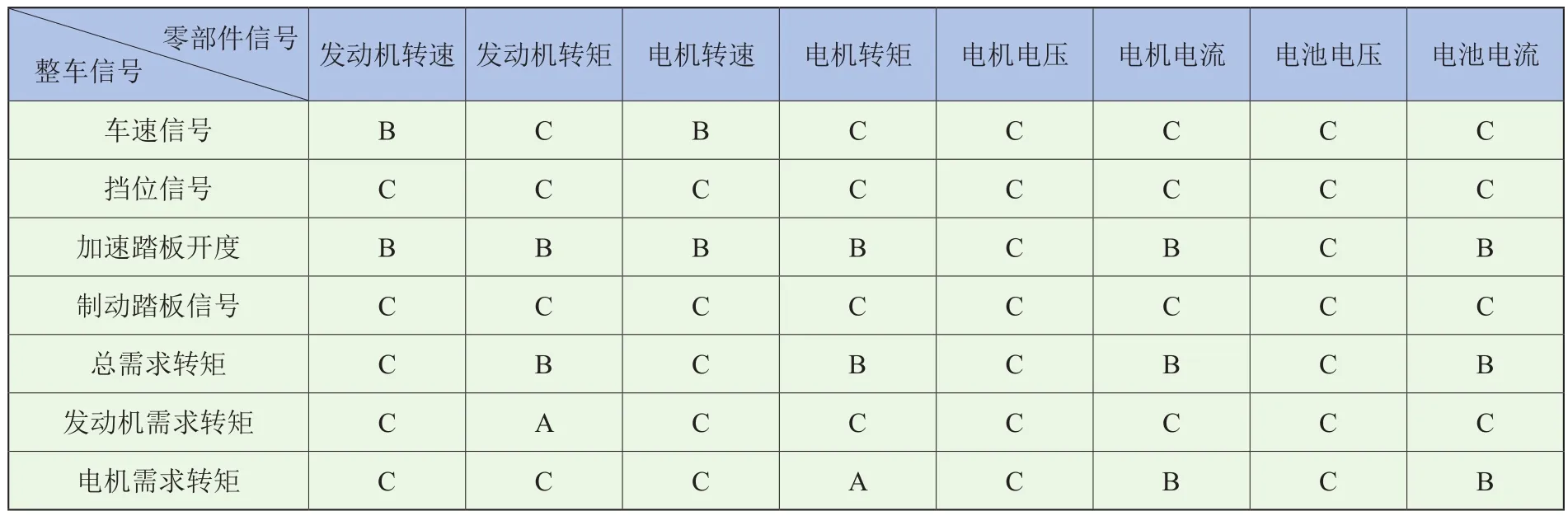
表1 整车控制信号与关键零部件控制信号的关联度分析表
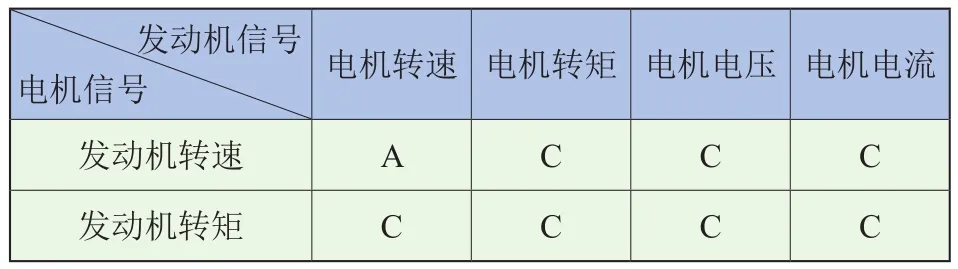
表2 发动机控制信号与电机控制信号的关联度分析表
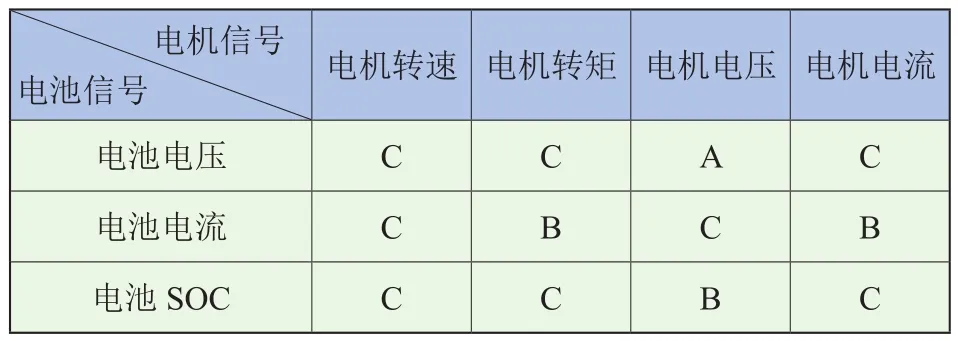
表3 电池管理信号与电机控制信号的关联度分析表
根据各关键控制信号之间的关联度分析表,可以找出CAN总线中有关联的控制信号,尤其是强相关信号,它们的信号变动方向和变动幅度基本一致,如电池电压与电机电压、发动机转速与电机转速等信号。还有一些看似弱相关的信号,但其中两个数的和值与另一个数是强相关信号,如整车总需求转矩与发动机需求转矩+电机需求转矩的和,电池电流与电机电流+DC/DC等电流的和。了解到关键控制信号之间的这些关联关系,可以加快CAN总线解析工作的进度,并对各关键控制信号的来源、传输路径、信号特征和信号用途等信息有了总体的把控。
3 某混合动力系统CAN总线解析结果
运用本文所述的CAN总线多渠道解析方法,经过多轮CAN总线结构及关键控制信号解析,并设计特定的试验验证工况,将解析后的CAN总线信号与数据采集系统、随车诊断仪以及仪表板显示数值等多渠道采集的信息进行比对和相互验证,得到了下一步混合动力系统控制策略解析需要的关键控制信号的CAN总线信息,圆满完成了CAN总线解析工作。图5为某混合动力汽车CAN网络拓扑结构的解析结果,图6为车辆起步-加速-制动过程CAN信号数据的分析结果。其中,图6b中发动机与电机转速曲线重合。由图可知,该类CAN信号与车辆实际行驶工况中相关信号的物理值和信号变动幅度与变动方向等趋势相吻合。
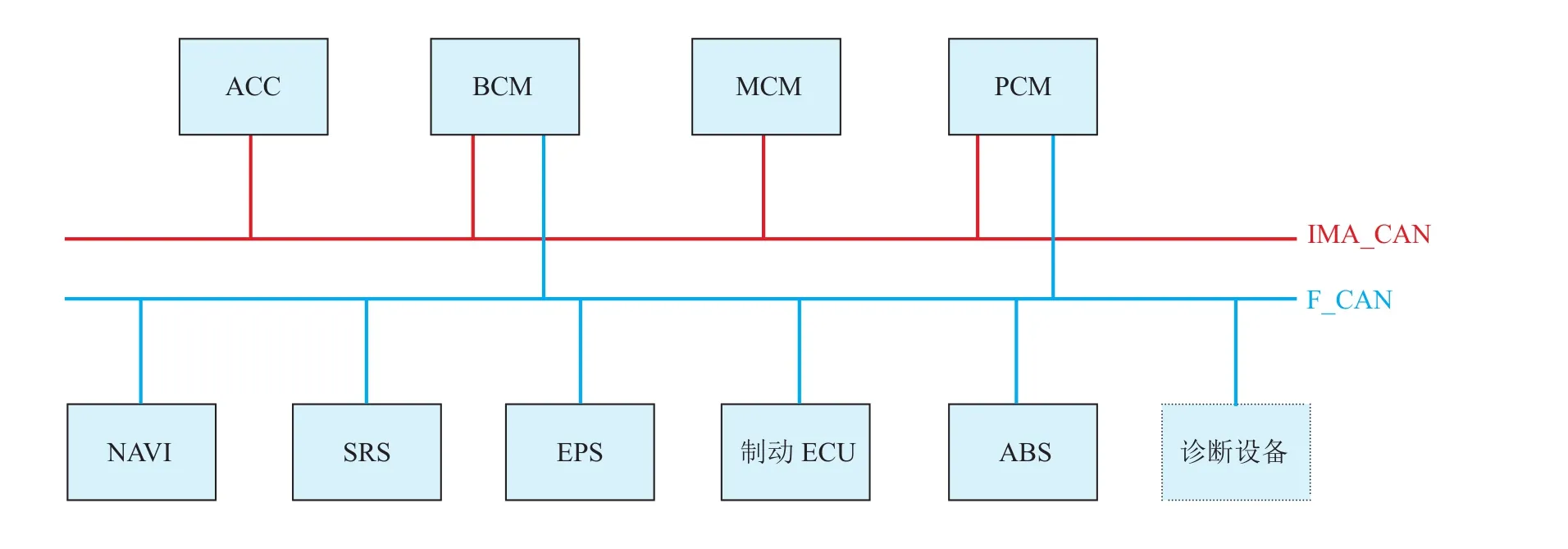
图5 混合动力汽车CAN网络拓扑结构图
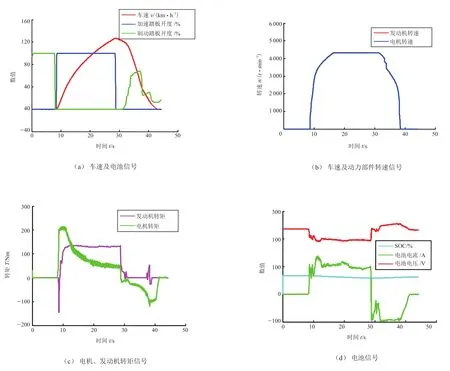
图6 车辆起步-加速-制动过程CAN信号数据
4 结论
(1)以诊断仪、多路数据采集系统及必要的测试道路等为外在条件,按照“分析工作模式-拓扑结构解析-CAN信号动静态解析-设定复杂工况解析-信号验证”的顺序,提出了CAN总线数据的多渠道解析思路和解析方法。
(2)以某混合动力汽车为例,在已获取必要信号的前提下,根据某信号特征设计测试工况,结合道路试验数据,利用能量守恒定理,计算某信号物理值,从而解析出信号详细信息,完成不易直接解析信号的解析和验证。
(3)该方法可应用于混合动力汽车CAN总线解析工作中,有益于提高解析工作效率、增加信号准确度。为后续全面解析混合动力汽车控制策略奠定了基础,为开发、改进及完善混合动力系统控制策略提供了新思路。
[1]荆新超, 敖国强, 朱建新,等. 混合动力汽车动力总成硬件在环仿真系统开发[J]. 车用发动机,2006(6):20-23.JIN Xinchao,AO Guoqiang,ZHU Jianxin,et al. The Development of Hardware-in-the-loop Simulation System of Hybrid Vehicle[J]. Vehicle Engine,2006(6):20-23. (in Chinese)
[2]本田思域混合动力汽车技术培训材料[Z]. 本田技研工业株式会社,2005.Technical Training Materials for Honda CIVIC Hybrid Vehicle[Z]. Honda Giken Industry Co.,Ltd,2005.(in Chinese)
[3]李新华, 吴小江, 周彦, 等. 雅阁和思域混合动力车ISG比较分析[J]. 汽车电器, 2013(5): 33-35.LI Xinhua,WU Xiaojiang,ZHOU Yan,et al. Comparative Analysis of ISG on ACCORD and CIVIC Hybrid Vehicles[J]. Auto Electric Parts,2013(5):33-35.(in Chinese)
[4]于潮, 张林涛, 陈红涛, 等. 本田IMA混合动力系统分析[J]. 汽车零部件, 2012(1): 73-75.YU Chao,ZHANG Lintao,CHEN Hongtao,et al.Analysis on IMA Hybrid System of Honda Motor[J].Automobile Parts,2012(1):73-75.(in Chinese)
[5]CAI Qijin,XU Yong,FU Junkun,et al. Study on Development and Testing of Vehicle CAN Network Platform Based on CANoe[J]. Applied Mechanics and Materials,2014,687-691:56-59.
[6]杨欣茹,关静,尹华钢, 等. 基于信息融合技术的混合动力汽车测试平台研究[C]//中国汽车工程学会第二届汽车测试技术年会,天津,2017.YANG Xinru,GUAN Jing,YIN Huagang,et al. Research of Hybrid Vehicle Testing Platform Based on Signal Integration Technique[C]// The 2nd Annual Conference of Auto Testing Technology of SAE-China,Tianjin,2017. (in Chinese)
An Approach to Analyze Electric Vehicle CAN Messages
ZHANG Yongsheng,GUAN Jing,YANG Xinru
(China Automotive Engineering Research Institute,Chongqing 401122,China)
In order to understand the characteristics and control strategy of electric vehicles, this paper puts forward a multi-channel method to analyze the CAN bus data, based on which the basic features and working modes of a hybrid electric vehicle are discussed. And then the association tables between the specific operating modes and CAN bus data are developed. Finally the effectiveness and feasibility of this analysis method are validated, and its reference value on actual testing and evaluation of EVs are proved.
hybrid electric vehicle;CAN bus;key control signal;multi-channel analysis
U469.72
A
10.3969/j.issn.2095-1469.2017.05.08
2017-08-08 改稿日期:2017-08-25
张永生,关静,杨欣茹. 电动汽车CAN总线多渠道解析方法 [J]. 汽车工程学报,2017,7(5):368-373.
ZHANG Yongsheng,GUAN Jing,YANG Xinru. An Approach to Analyze Electric Vehicle CAN Messages [J]. Chinese Journal of Automotive Engineering,2017,7(5):368-373. (in Chinese)
作者介绍

责任作者:张永生(1972-),男,重庆大足人。硕士,中级工程师,主要从事电动汽车控制技术、测试评价方法等研究。
Tel:15923258031
E-mail:zhangyongsheng@caeri.com.cn

关静(1981-),女,湖南澧县人。硕士,中级工程师,主要研究方向为新能源汽车车载网络开发及解析。
E-mail:guanjing@caeri.com.cn
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
网络安全与数据管理(2022年2期)2022-05-23
科学家(2021年24期)2021-04-25
中国外汇(2019年11期)2019-08-27
雷达与对抗(2019年4期)2019-03-10
东方教育(2016年12期)2017-01-12
商业经济研究(2016年22期)2016-12-27
新教育时代·教师版(2016年30期)2016-12-05
现代电子技术(2009年14期)2009-09-05