
改进泰森多边形的UWB危化品仓储定位技术
2017-11-03 15:55安海洋李志超刘学君
自动化仪表 2017年10期
戴 波,安海洋,,李志超,,刘学君
(1.北京石油化工学院信息工程学院,北京 102617;2.北京化工大学信息科学与技术学院,北京 100029)
改进泰森多边形的UWB危化品仓储定位技术
戴 波1,安海洋1,2,李志超1,2,刘学君1
(1.北京石油化工学院信息工程学院,北京102617;2.北京化工大学信息科学与技术学院,北京100029)
我国危化品仓储库房大多采用人工码垛堆放的存储方式。安全监察部门对于货物堆垛五距(垛距、墙距、顶距、柱距和通道距)虽然有明确要求,但缺乏有效的监管手段。利用超宽带(UWB)技术手段可以较好地对库房中危化品货物进行定位,从而监测堆垛间距。但目前UWB定位精度不能很好地满足危化品仓储监管要求,需要一定的校正手段。泰森多边形矢量校正法可以提高危化品仓储中货物的定位精度,但也存在一定局限性。在分析并通过试验验证其局限性的基础上,提出了改进的泰森多边形矢量校正法。结合危化品仓储实际环境,选取不等距的参考点,同时设立虚拟参考点,构建更多的泰森多边形,能够实现更精准的危化品仓储货物定位。试验证明,改进的泰森多边形矢量校正法能有效提高定位精度,适用于危化品仓储的货物监管。
危化品仓储; 无线通信; 定位技术; 泰森多边形法; 误差分析
0 引言
因危险化学品具有易燃性、毒性、腐蚀性等特点[1],我国《常用危险化学品贮存通则》对危化品贮存的五距(垛距、墙距、顶距、柱距和通道距)给出了明确的规定:隔开贮存、隔离贮存和分离贮存的安全距离限制均为0.3~0.5m。但是对于五距的监测,尚缺少有效的技术手段[2]。通过室内跟踪定位技术,结合货箱自身尺寸参数实现仓储堆垛的三维重构,就可以得到危化品箱体的五距参数,并实现监管。
目前,很多无线定位技术,如WiFi、RFID、红外线等,并不能很好地克服干扰并满足定位精度要求[3]。与此相比,超宽带(ultra-wideband,UWB)技术采用时间间隔极短的脉冲进行通信,具有定位精度高、穿透力强、抗干扰能力强等优势[4-7],能够相对容易地进行室内精确定位[8],更加适用于危化品仓储环境。但UWB定位系统在遮挡物较多的非视距(nonlineofsight,NLOS)环境中,定位精度会明显恶化[9]。而危化品仓储环境易受到遮挡和干扰,加大定位误差。针对此类问题,文献[10]提出了一种基于矢量补偿的校正算法,以提高UWB定位精度。该算法虽取得了一定效果,但依然有局限性。试验表明,与原算法相比,本文提出的改进算法,能更有效地提高危化品仓储中堆垛货物的定位精度。
1 泰森多边形法UWB定位误差分析
1.1UWB定位原理
UWB是一种无载波通信技术,它利用ns至μs级的非正弦波窄脉冲传输数据,因此所占的频谱范围很宽[11]。目前主要的UWB定位技术方法为基于到达角度(angleofarrival,AOA)的估计算法[12]和基于到达时间(time/timedifferenceofarrival,TOA/TDOA)的估计算法。基于类似危化品仓储等复杂环境,AOA在功耗需求上要大于TOA/TDOA,同时AOA不适用于经过强反射的多径UWB信号。由此,对TOA/TDOA技术的应用是研究UWB定位技术的关键[13-15]。在目前的TOA估计算法中,多径检测是最为常用的方法之一,即通过检测多径分量中的直射路径(directpath,DP)来确定收发两端的TOA,从而达到测距定位的目的[16]。因为检测过程中总会产生其他多径信号的干扰,使得DP的检测受到影响,即使传感器和标签之间存在视距传播,多径效应也会引起测量误差[17],所以,多径检测是引起各种信号测量值出现误差的主要原因之一。影响UWB定位精度的另一个主要因素是UWB信号的非视距传播。当传播信道中有障碍物遮挡时,DP到达时间不能代表TOA的真实值,即存在非视距误差。
为解决DP的检测精度和非视距传播问题,学者们作了大量研究,在检测TOA估计算法方面,文献[18]、文献[19]基于能量检测的TOA非相干估计算法,对DP块检测门限进行动态优化,提高了DP检测成功率,但采样频率较低,定位精度不理想;文献[20]、文献[21]基于匹配滤波的相干TOA估计算法较多采用的采样频率,能够很大程度地提高UWB精确测距能力,但是在多径效应较严重的非视距环境中,很难实现峰值搜索。在非视距误差方面,文献[22]用过TOA测量值标准差对LOS/NLOS传播环境进行判断,利用误差统计信息降低最小二乘法中NLOS测量值权重来调节测量值,但是在多变的实际环境中,信号的传播容易受到信道陷入严重衰落等不可控因素的干扰,定位精度很难达到预期。因此,这些方法不适用于危化品仓储等复杂环境。对此,一些学者将协同定位思想作为提升定位精度的手段。文献[23]讨论了协同定位的应用及其存在的不足。文献[24]基于协同定位思想,提出四参考点矢量补偿定位算法。通过测算参考点定位误差偏移矢量,经过计算补偿相关区域内待测点定位误差,避免了检测TOA估计算法和消除非视距误差等难点,从整体上提高了定位精度,但是部分待测点定位精度不够理想。
本文采用英国Ubisense7000UWB定位系统,搭建危化品仓储堆垛五距监测试验平台。该系统由电池供电的UWB标签、位置固定的传感器和信息综合软件平台3个部分构成[25]。Ubisense系统工作时,将UWB标签绑定在待监测危化品货物箱体上,就能实现对货物箱体的定位;将定位信息与货物箱体尺寸信息整合,便可实现对箱体的三维重构,真实还原其在仓库中的空间位置、摆放状态以及五距信息等。
危化品仓储UWB定位系统如图1所示。

图1 UWB定位系统示意图
1.2泰森多边形法误差分析
泰森多边形矢量校正算法是基于协同定位的思想所提出的。协同定位是利用各节点参数、状态更新、位置计算在定位系统中交互关系,得到目标节点定位信息。根据UWB定位原理,距离相近的UWB标签发出信号后会由相同的传感器检测并测距,DP检测、信道环境及其TOA估计算法相同,从而导致其距离误差和坐标偏离趋势相似。因此,可以以某一标签作为参考点,以其测量位置与实际位置的矢量差来替代其周围区域的所有标签的偏移矢量趋势,将偏移矢量补偿给测量位置处在该区域的待测的箱体(标签),并由此推算出其实际位置。参考点所代替的区域通过泰森多边形法求得。由泰森多边形法划分的区域有3个特性:①每一个泰森多边形内仅包含1个参考点;②泰森多边形区域内的待测点到相应区域参考点的距离最近;③位于泰森多边形边上的待测点到其两边的参考点的距离相等。因此,基于协同定位思想的泰森多边形矢量补偿方法,是解决UWB定位精度问题较好的选择。
原泰森多边形矢量校正法通过搭建模拟危化品仓库进行试验研究。该方法以仓库内一点为原点O建立参考坐标系,将3.6m×3.6m的正方形视为仓库中被监控区域,并以0.6m为步距对该区域进行二维网格划分;选择每个网格节点作为参考点,并以此为基点构建泰森多边形对被监控区域进行划分,通过事先确定某个参考点的实际坐标(真实值)和UWB定位系统得到的测量值,来计算得到该参考点的误差矢量,即作为该参考点所属区域的误差矢量。
通过多组试验验证,泰森多边形矢量补偿法提高了定位精度。但是该方法也存在一定局限性:①选择参考点位置为等距的方形阵列较为理想,搭建的模拟危化品仓库未能很好地还原实际仓储中复杂堆垛环境;②以等距阵列分布的参考点作为基点构建的泰森多边形区域,均为全等的正方形,分析多组试验数据发现,处于正方形区域边、角的待测点定位校正效果普遍稍差。由此分析,待测点与参考点距离越大,其误差矢量与参考点误差矢量相差越多。因此,该算法对于距参考点较远测点的校正效果并不理想。
1.3泰森多边形法误差检测
为验证上述分析,首先对正方形区域中处于不同位置的待测点进行了对比试验。搭建模拟危化品仓库并建立参考坐标系,随机取4个相邻泰森多边形区域作为研究区域,区域内4个参考点坐标分别为(1.80,1.80)、(2.40,1.80)、(1.80,2.40)、(2.40,2.40);同时,测得参考点测量值并得到误差矢量Am,坐标分别为(0.04,-0.07)、(0.11,-0.03)、(-0.05,-0.07)、(0.05,0.03)。
将正方形区域分成2部分:位于圆内(S区)的点视为距离参考点较近的点;位于圆外(L区)的点视为距离参考点较远的点。将待测点随机放置于4个正方形区域内进行试验,在每个正方形区域随机抽取6个待测点,得到待测点校正情况如图2所示。
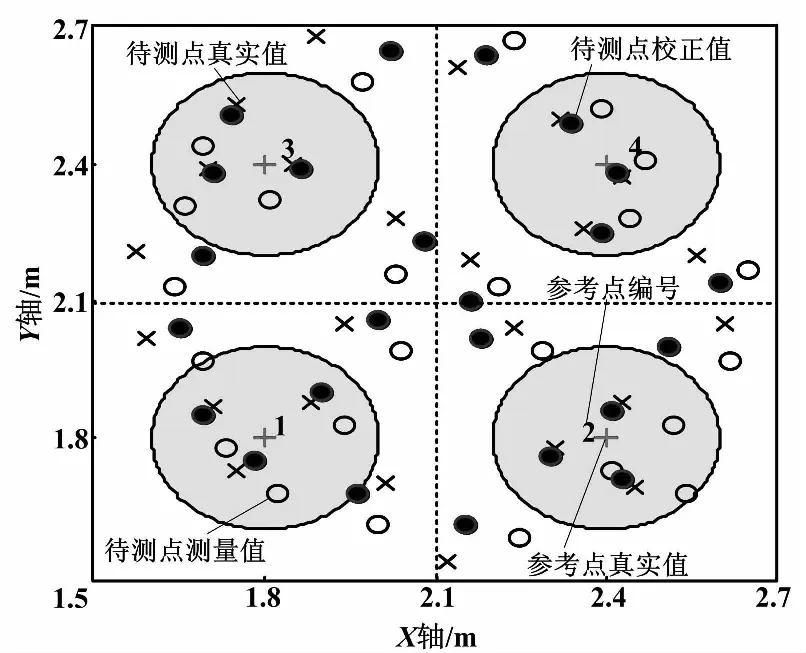
图2 待测点校正情况示意图
S区和L区部分待测点校正情况如表1所示。

表1 部分待测点校正情况
由试验数据分析,位于S区待测点校正后的最大误差在4cm以内,平均误差为2.4cm,平均提升精度为6.4cm,取得了良好的校正效果;位于L区待测点校正后的平均误差为8.2cm,平均提升精度为2.3cm,部分待测点校正后误差依然很大,个别待测点达到13cm,其定位精度不能满足要求。基于原校正方法的2个不足,提出了一种改进泰森多边形矢量校正算法。
2 改进泰森多边形矢量校正法的UWB定位研究
2.1改进泰森多边形法误差检测
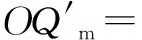
随机选择2个区域作为研究区域,记为G1、G2。每个区域分别包含4个参考点,分别记录OPm和ONm的值,并计算得到其误差矢量Am=ONm-OPm,如表2所示。

表2 参考点误差矢量情况
在模拟的危化品仓库内建立直角坐标系,选择4.6m×3.6m的区域作为被测区域。考虑到仓库中存在尺寸不同堆垛货物和未知宽度的通道,试验中将被监测区域进行不等距二维网络的划分,选择每个网络节点作为参考点,并在每个参考点上放置标签。参考点分布的横坐标分别为0.3、0.9、1.9、3.3、4.5;纵坐标分别为0.3、0.8、2.0、2.6、3.5。以由这些参考点为基点构建的泰森多边形对区域进行划分,其中一些参考区域的面积更大。由上节内容可知,当待测点测量值处在泰森多边形边角位置时,多数待测点校正精度不能满足要求。因此,猜测本次参考点设置会面临同样问题,并进行了如下试验。
在每个泰森多边形区域内随机放置若干待测点 (UWB标签)进行试验,与参考点距离较远(处于泰森多边形区边角处)的区域记为L′区,与参考点距离较近的区域记为S′区。在每个泰森多边形S′区和L′区内各随机抽取1个待测点得到真实值、测量值以及计算得到校正值并显示其分布情况。
待测点矢量校正情况如图3所示。

图3 待测点矢量校正情况示意图

由表3、表4可知,S′区内待测点校正前平均定位误差为14.1cm,校正后为5.4cm,平均提升精度8.7cm,取得较为理想的效果,达到预期要求;L′区内待测点校正前平均定位误差为12.5cm,校正后为8.2cm,平均提升精度4.3cm,总体分析虽然达到了提高定位精度的目的,但是校正效果明显不够理想,并且个别待测点定位精度提升不大,误差依然较高,不能满足定位精度要求。该结果验证了前文中对处于边角位置待测点校正效果不理想的猜测。

表3 距参考点较近待测点(S′区)校正情况

表4 距参考点较远待测点(L′区)校正情况
2.2增加虚拟参考点泰森多边形法定位研究
为克服上节中处于泰森多边形边角处待测点校正精度差的缺陷,在原参考点分布的基础上增加了虚拟参考点。选择每个网络中心点作为虚拟参考点,其横坐标分别为0.6、1.4、2.6、3.9;纵坐标分别为0.55、1.4、2.3、3.05。由UWB定位原理可知,在一片较小区域内,不同待测点的真实值和测量值的距离误差和偏移趋势相似。即某个待测点误差矢量和以其为圆心的某圆上所有待测点的误差矢量存在相似分布,将小圆化为多边形,那么多边形上所有点矢量差的加权平均值会与该待测点十分接近[24]。
虚拟参考点的定位偏移误差矢量由包围其四边形4个顶点上参考点的误差矢量计算得到。这样可以在不增加新的标签进行参考点误差矢量测算的同时,使构建的泰森多边形面积更小,对区域划分更为合理,进而达到提高泰森多边形边、角待测点校正效果的目的。以原参考点和虚拟参考点为基点构建泰森多边形,含虚拟参考点误差矢量图如图4所示。
图4 含虚拟参考点误差矢量图
对试验区域重新划分形成的泰森多边形区域为形状不同的多边形,较之前的划分方式,新的泰森多边形区域面积更小,参考点在区域内的位置更为居中;同时,新的划分方式在保证与参考点较近的区域内待测点校正效果的同时,提高了与参考点较远区域的校正效果。

虚拟参考点误差矢量如表5所示。

表5 虚拟参考点误差矢量
在新算法下,含虚拟参考点矢量校正情况如图5所示。

图5 含虚拟参考点矢量校正情况示意图
为直观地对比本次算法对提高待测点定位精度的有效性,选取图3中16个待测点(UWB标签)作为研究对象,即待测点位置真实值不变。由于2次试验的周围环境未发生改变,所以UWB系统得到的待测点测量值不变,因此各待测点校正前原始定位误差不变。
分析对比图5和图3发现:图3中S′区域内的待测点由于距离参考点较近,本次试验依然处于原参考点泰森多边形区域中,2次的矢量校正效果相同,提升精度情况见表3;图3中L′区内待测点处于边角位置,距离参考点较远,在本次试验中,所在区域的参考点发生了改变,改由虚拟参考点误差矢量进行校正,因而得到了不同的校正效果。
虚拟参考点矢量校正情况见表6。

表6 虚拟参考点矢量校正情况
由表6可得,虚拟参考点区域内待测点校正前平均定位误差为12.5cm,校正后为4.9cm,且最大值未超过8cm,平均提升精度为7.6cm。相比于由原参考点校正得到的定位提升精度为4.3cm(见表4),证明本次试验取得了良好的校正效果,并达到预期的定位精度提升要求。
为进一步验证增加虚拟参考点的泰森多边形算法能有效提高处于不同位置待测点定位精度,在试验区域内随意放置待测物体并捆绑标签,按照上述方法进行多组试验并记录数据。
验证组待测点定位误差对比如图6所示。

图6 验证组待测点定位误差对比图
分析验证组数据,所有待测点原平均定位误差为13.2cm,校正后的平均误差为5.3cm,平均提升精度为7.9cm。加入了虚拟参考点的改进泰森多边形算法,可有效提高所有待测点定位精度,并能达到预期要求。但是由于UWB定位技术受多径效应、非视距传播或者某些未知因素影响,造成定位误差的不确定性,试验过程中会出现一些特殊情况,如个别待测点原定位误差很小,或者同一泰森多边形区内可能出现不同的偏移趋势等,都会导致对其没有校正效果,甚至降低其定位精度。但这些误差均在误差允许范围。
3 结束语
UWB室内定位技术对危化品仓储五距监测有着重要意义。对比其他室内定位技术,UWB具有较高的带宽,以及很强的时间分辨能力,因此会产生较小的定位误差。而危化品仓储的复杂环境会对UWB定位产生严重影响,使得定位精度达不到预期。
本文结合危化品仓储实际环境,基于已有文献提出的泰森多边形矢量校正算法进行了误差分析并提出改进算法;同时,依托Ubisense7000UWB定位系统进行大量试验。试验结果表明,改进的算法结合实际复杂仓储环境,能够提高危化品堆垛货物定位精度,达到了预期效果。
[1]LIUJN,CHENT,FANDL,etal.RankingandscreeninghazardouschemicalsforhumanhealthinsoutheastChina[J].OrganicChemistryCurrentResearch,2014,3(1):2161-0401.
[2] 柴保身.我国危险品仓储业发展现状与展望[J].物流工程与管理,2009,31(12):19-23.
[3]ABU-MAHFOUZAM,HANCKEGP.Anefficientdistributedlocalisationalgorithmforwirelesssensornetworks:basedonsmartreference-selectionmethod[J].InternationalJournalofSensorNetworks,2013,13(2):94-111.
[4]WINMZ,SCHOLTZRA.Characterizationofultra-widebandwidthwirelessindoorchannels:Acommunicaitonstheoreticview[J].IEEEJournalonSelectedAreasinCommunications.2002,20(9):1613-1627.
[5]CHOIJD,SCHOLTZRA.Performanceofultra-widebandcommunicaitonswithsubpotimalreceiversinmulti-pathchannel[J].IEEEJournalonSelectedAreasinCommunicaitons.2002,20(9):1754-1766.
[6]WINMZ,SCHOLTZRA,BARNESMA.Ultra-widebandwidthsignalprogagationforIndoorWirelesscommunications[C]//ProceedingsofICC97-InternationalConferenceonCommunicationsMontreal,1997:56-60.
[7]ROSSGF.Trasnmissionandreceptionsystemforgenerationandreceivingbase-banddurationpulsesingalswithoutdistortionforshortbase-bandpulsecommunicationsystem:3728632[P].1973-04-23.
[8]WYMEERSCHH,MARANS,GIFFORDWM,etal.AmachinelearningapproachtorangingerrormitigationforUWBlocalization[J].IEEETransactionsonCommunications,2012,60(6):1719-1728.
[9]XIAOZ,WENH,MARKhHAMA,etal.Non-line-of-sightidentificationandmitigationusingreceivedsignalstrength[J].IEEETransactionsonWirelessCommunications,2015,14(3):1689-1702.
[10]戴波,李志超,刘学君,等.基于泰森多边形的UWB危化品堆垛仓储货物定位技术[J].化工学报,2016,67(3):878-884.
[11]AZARIA,ISMAILA,SALIA,etal.Anewsuperwidebandfractalmonopole-dielectricresonatorantenna[J].IEEEAntennasandWirelessPropagationLetters,2013,12(5):1014-1016.
[12]LEEJY,SCHOLTZR.RanginginadensemultipathenvironmentusinganUWBradiolink[J].IEEEJournalonSelectedAreasinCommunications,2002,20(9):1677-1683.
[13]VENKATESHS,BUELLERRM.NLOSmitigationusinglinearprogramminginultrawidebandlocation-awarenetworks[J].IEEETransactionsonVehieularTechnology,2007,55(5):3182-3198.
[14]MIAOHL,YUK,JUNTTIMJ.PositioningforNLOSpropagation:Algorhthmdeviationsandcramer-raobounds[J].IEEETransactionsonVehicularTechnology,2007,56(5):2568-2580.
[15]SEOWCK,TANSY.Non-line-of-sightlocalizationinmultlpathenvironments[J].IEEETransactionsonMobileComputing,2008,7(5):647-660.
[16]CASSIOLID,WINMZ,VATALAROF,etal.Lowcomplexityrakereceiversinultra-widebandchannels[J].IEEETransactionsonWirelessCommunications,2007,6(4):1265-1275.
[17]贺鹏飞. 超宽带无线通信关键技术研究[D].北京:北京邮电大学,2007.
[18]GUVENCI,SAHINOLUZ.ThresholdselectionforUWBTOAestimationbasedonkurtosisanalysis[J].IEEECommunicationsLetters,2005,9(12):1025-1027.
[19]WUSH,ZHANGQY,ZHANGNT.Novelthreshold-basedTOAestimationalgorithmforIR-UWBsystems[J].JournalonCommunications,2008,29(7):7-13.
[20]WANGYY,CHENJT,FANGWH.TST-MUSICforjointDOA-delayestimation[J].SignalProcessing,2001,49(4):721-729.
[21]DINGR,QIANZH,WANGX.JointTOAandDOAestimationofIR-UWBsystembasedonmatrixpencil[C]//InternationalForumonInformationTechnologyandApplications,2009:544-547.
[22]丁锐. 基于UWB信号时延估计的无线定位技术研究[D].长春:吉林大学.2009.
[23]SHENY,MAZUELASS,WINMZ.Cooperativenetworknavigation:fundamentallimitanditsgeometricalinterpretation[J].IEEEJournalonSelectedAreasinCommunications,2012,30(9):1823-1834
[24]戴波,吕昕,刘学君,等.基于UWB四参考点矢量补偿的危化品仓储堆垛货物定位方法[J].化工学报,2016,67(3):871-877.
[25]BENEDETTOMGD,GIANCOLAG.Understandingultrawidebandradiofundamentals[M].London:PreticeHall,2004:2273-310.
UWBPositioningTechnologyBasedonImprovedThiessenPolygonforStackingofHazardousChemicals
DAI Bo1,AN Haiyang1,2,LI Zhichao1,2,LIU Xuejun1
(1.College of Information Engineering,Beijing Institute of Petrochemical Technology,Beijing102617,China;2.College of Information Science & Technology,Beijing University of Chemical Technology,Beijing100029,China)
Currently,manual palletizing stacking mode is mostly used in the storage warehouses of hazardous chemicals in our country.Although explicit requirements about five-distance (stacking distance,distance from the wall,distance from the top,distance from the column,and distance of aisles) are issued by security administration department,there are no effective measures provided.The goods in hazardous chemicals warehouse can be well located by using ultra-wideband(UWB) technical measures to monitor the distance between stacks.Because the positioning accuracy of UWB cannot meet the administration requirement for hazardous chemicals warehousing at present,the correction method is needed.The Thiessen polygon vectors compensation method may improve the positioning accuracy of hazardous chemicals in the warehouse,while still some limitations exist.On the basis of analysis and experimental verification of these limitations,the improved Thiessen polygon vector correction method is proposed.Combining with the actual environment of hazardous chemicals warehouse,the not-equidistant reference points are selected,and the virtual reference points are setup to establish more Thiessen polygons,thus more accurate positioning of the goods is implemented.The tests show that the improved Thiessen polygon vector correction method can improve the positioning accuracy further;it is applicable to the regulatory of goods in hazardous chemicals warehousing.
Dangerous chemicals storage; Wireless communication; Positioning technology; Thiessen polygon method; Error analysis
TH-3;TP2
10.16086/j.cnki.issn1000-0380.201710015
修改稿收到日期:2016-11-30
国家重点研发计划基金资助项目(2016YFC0801502)、北京市教育委员会科技能力提升计划基金资助项目(PXM2016_014222_000041)
戴波(1962—),男,硕士,教授,主要从事危化品仓储安全距离监测方向的研究。E-maildaibo@bipt.edu.cn。
猜你喜欢
江苏安全生产(2022年8期)2022-11-01
江苏安全生产(2022年4期)2022-05-23
上海计量测试(2022年1期)2022-03-24
水上消防(2021年5期)2022-01-18
湖北农机化(2020年22期)2021-01-18
水上消防(2020年4期)2021-01-04
好日子(下旬)(2020年6期)2020-08-04
民间故事选刊·上(2019年8期)2019-08-22
消费导刊(2019年3期)2019-01-28
公务员文萃(2016年10期)2016-10-31
