
基于改进模糊免疫PID的变频空调低速域控制研究
2017-11-03 15:55付光杰李新鹏乔永娜牟海维
自动化仪表 2017年10期
付光杰,李新鹏,乔永娜,牟海维
(1.东北石油大学电气信息工程学院,黑龙江 大庆 163318;2.东北石油大学电子科学学院,黑龙江 大庆 163318)
基于改进模糊免疫PID的变频空调低速域控制研究
付光杰1,李新鹏1,乔永娜1,牟海维2
(1.东北石油大学电气信息工程学院,黑龙江 大庆 163318;2.东北石油大学电子科学学院,黑龙江 大庆 163318)
针对家用变频空调压缩机工作于低速域时其转速波动大的问题,以内埋式永磁同步电机(IPMSM)的最大转矩电流比控制系统为平台,设计了改进的模糊免疫PID智能转速控制器。优化的转速控制器利用免疫算法对隶属函数和控制规则进行分阶段优化,大大降低了计算复杂度;同时,引入加权因子,实现了控制器在模糊控制和模糊免疫PID控制之间的控制模式转换。改进的模糊免疫PID控制器克服了传统模糊免疫PID只针对比例系数进行免疫优化的缺点,可实现比例、积分、微分参数的免疫智能实时并行优化。为验证改进控制器的有效性,以MATLAB为平台,以纯滞后系统为控制对象,对改进后和传统的模糊免疫PID控制器的单位阶跃响应控制效果进行对比。对比结果表明前者具有更高的控制精度和更短的上升时间。利用改进的模糊免疫PID代替控制系统中传统的转速控制器,可使压缩机低速域的响应速度和稳态精度得到明显改善。
变频技术; PID控制器; 永磁同步电机; 低速域控制; 模糊免疫算法; 优化; 控制模式
0 引言
随着电力电子技术、自动控制理论的不断发展,变频技术在交通运输、家用电器等领域的应用愈发广泛[1]。变频技术解决了传统定频开/关模式转换所导致的大量能耗、强大冲击电流以及强烈振动引起的噪声等问题[2]。然而,当压缩机在低速区运转时,由于没有高速运转送风声音的掩盖,低速工况下压缩机因较大的转速脉动而产生的噪声将在很大程度上成为影响用户休息的主要干扰源。同时,压缩机作为变频空调的核心,具有多输入/多输出的强耦合、非线性和时滞性的特点,致使压缩机的调速系统无法依靠简单的PID控制器甚至单一的智能算法实现有效的实时调节[3]。因此,系统的动态响应能力、转速控制精度以及控制系统的智能化程度亟需改善。
20世纪90年代,日本着手将模糊控制应用于空调控制器领域。目前,日本及欧洲诸国已研究出基于遗传算法的空调控制器,并欲将混沌理论应用于该领域[4]。由此可见,引入智能算法是变频空调控制系统研究的主流趋势。而免疫是生物机体的一种能识别“自己”与“非己”,并自发采取精确应答的特征性生理反应[5]。生物免疫系统的强大学习与记忆能力使其具有很强的鲁棒性和自适应能力,以及较快的响应速度[6]。根据上述特性,将基于免疫系统对入侵异物(即误差)的快速反应和迅速镇定原理的免疫算法,应用于变频空调压缩机的低速域转速控制中,力求减小压缩机低速域运行过程中的超调量,使转速更加平稳、响应速度更快,以减小伴随较大转速脉动引起的噪声。
1 变频空调压缩机控制系统
1.1内埋式永磁同步电机数学模型
内埋式永磁同步电机(interiorpermanentmagnetsynchronousmotor,IPMSM)以其高性能和高效率等优点而被广泛应用于诸多工业领域,如空调压缩机驱动系统[7]。内埋式永磁同步电机的气隙分布是不均匀的,会导致等效励磁电感不断变化。为避免电枢反应磁场的复杂定量计算,运用坐标变换对同步电动机定子的三相静止abc坐标轴系中的基本方程进行线性变换,从而建立同步旋转dq轴系下的IPMSM数学模型,实现IPMSM数学模型的解耦。令us为定子电压、is为定子电流、ψs和ψf分别为定子磁链和转子磁链、θr为转子角位置、δ为转子的电机转矩角。
定子磁场在dq轴方向上的分量ψd与ψq如式(1)所示。
(1)
式中:Ld和Lq分别为直轴同步电感和交轴同步电感。
dq轴系下的电压分量方程可通过对abc轴系中的定子电压进行矢量变换获得,如式(2)所示。
(2)
式中:Rs为定子电阻;ωr为转子的电角速度。
由于内埋式永磁同步电机的直轴磁阻大于交轴磁阻而表现出凸极电机的特性[8],因此dq坐标系中IPMSM的电磁转矩方程如式(3)所示。

(3)
式中:pn为电机极对数。
1.2单位电流最大转矩控制
从内埋式永磁同步电机电磁转矩式(3)可以看出,对于表贴式永磁同步电机,有Ld=Lq,即由id产生的磁阻转矩分量为0。而对内埋式永磁同步电机而言,若亦将id近似为0,会给内埋式永磁同步电机转速控制带来一定的转矩损失[9]。在变频空调压缩机低速域控制中,希望在达到期望的转矩时消耗的电流最小,因此引入了最大转矩电流比(maximumtorqueperampere,MTPA)控制策略[10]。
单位电流最大转矩控制的原理是根据最大转矩对电流id和iq进行合理分配。IPMSM运行包含2个限制条件:最大电压限制和最大电流限制[11],如式(4)所示。
(4)
式中:Us和Is分别为定子电压幅值和电流幅值;Usmax为PWM逆变器的最大输出电压;Ismax取决于IPMSM的定子额定电流。
忽略电阻压降,则式(4)可简化为:
(5)
当负载转矩一定时,若要降低电机定子电流幅值,可将该问题转化为如式(6)所示的动态优化问题。
(6)
(7)
对式(7)中的id、iq、λ分别求偏导,并令偏导数为0,组成方程组如式(8)所示。
(8)
在MTPA控制策略下,有id<0,因此解方程组(8)可得:
(9)
2 模糊免疫PID控制器的优化
2.1免疫控制器原理及优化
定义TH(k)为辅助细胞TH在抗原刺激下的输出,TS细胞抑制B细胞的作用结果为TS(k),则免疫系统受到刺激后由B细胞产生的输出如式(10)所示。
S(k)=TH(k)-TS(k)
(10)
式中:TS(k)=k2f[ΔS(k)]×φ(k);TH(k)=k1φ(k),φ(k)为第k代抗原数量。
将免疫应答过程对应于控制器的输入和输出。其中,φ(k)对应转速偏差,作为转速调节系统的输入。由B细胞产生的输出S(k)作为控制器的输出u(k)。则控制器的控制表达式为:
u(k)={k1-k2f[Δu(k)]}×φ(k)
(11)
若令K=k1、η=k2/k1,则可进一步将式(11)化为式(12)。
u(k)=K{1-ληf[Δu(k)]}×φ(k)
(12)
式中:K为控制免疫应答的速度;η为控制系统稳定的系数;λ为-1、1或0,分别表示免疫过程中的3个不同阶段,即促进状态、抑制状态和免疫稳定状态。
式(12)表明,该控制器实质上是一个比例系数随控制器输出的变化而变化的非线性比例控制器。
但是该控制器无法有效地实现对高阶控制系统的控制,同时抗噪声等干扰的能力也无法满足实际需求。因此,需在免疫控制的基础上加入积分和微分环节,如式(13)所示。
u(k)=K{1-ληf[Δu(k)]}×
(13)
当0<ληf[Δu(k)]≤1时,控制器实现负反馈;当ληf[Δu(k)]>1时,控制器实现正反馈。

(14)
(15)
(16)

图1 改进的并联型模糊免疫控制器结构图
2.2模糊免疫控制器的设计
作为控制器输出变化量的Δu(k)在免疫算法中担任抗体浓度的角色,而T细胞的调节作用与抗体浓度密切相关[12]。因此在选取非线性函数f(·)时应充分考虑T细胞的调节作用,本文选取的非线性函数表达式如式(17)所示。
f[Δu(k)]=1-exp{-α[Δu(k)]2}
(17)
式中:α为抗体浓度作用系数。
由式(17)可知,作用系数α的选取将直接影响免疫控制的程度,而作用系数α的人为设定将导致控制器不具有普遍性和推广性。因此,采用具有很强适应能力的模糊控制近似逼近函数f(·)。
模糊控制器的输入为u(k)和Δu(k),输出为免疫反馈的抑制量f(·)。其中,输入变量u(k)、Δu(k)分别用量化因子ke和kec进行量化,映射到模糊集合论域,以增加控制的灵敏度,同时也便于模糊规则的应用。模糊决策的输出量f(·)由正模糊集(P)、零模糊集(Z)和负模糊集(N)进行模糊化,并依靠比例因子ku将其从模糊论域映射到基本论域。模糊规则的设计原则为:细胞接受的刺激与其抑制能力成反比,即细胞接受的刺激越大,其抑制能力反而越小。其中,模糊推理逻辑规则采用以下4条。
Rule1:IFu(k) IS P AND Δu(k) IS P THENf[Δu(k)] IS N
Rule2:IFu(k) IS P AND Δu(k) IS P THENf[Δu(k)] IS Z
Rule3:IFu(k) IS N AND Δu(k) IS P THENf[Δu(k)] IS Z
Rule4:IFu(k) IS P AND Δu(k) IS P THENf[Δu(k)] IS P
2.3模糊免疫控制器设计优化
2.3.1控制模式切换
单纯的模糊控制器相当于1个PD控制器,因此模糊控制器可以提高动态响应特性并有效抑制超调,但积分环节的缺失使其无法达到令人满意的稳态精度。虽然本文将免疫控制用于积分环节的参数优化,但是免疫算法的计算量较大,3个免疫控制器的同时使用更增加了计算复杂程度。对此,提出智能切换的控制模式。其主体思想为:引入加权因子φ,使控制器的控制模式可在模糊控制和模糊免疫PID之间平滑转换。以变频空调压缩机MTPA控制系统为例,当系统前期或受干扰后导致转速误差较大时,由模糊控制器单独作用,通过较大的比例系数使转速迅速跟踪给定转速;当误差较小时,将控制模式切换到模糊免疫PID控制器,以进一步减小稳态误差。
控制模式转换原理图如图2所示。
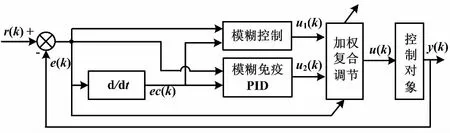
图2 控制模式转换原理图
u(k)=φu1(k)+(1-φ)u2(k)
(18)
由式(18)可知,当误差较大时,φ→1,u(k)≈u1(k),主要由模糊控制进行系统调节;当误差较小时,φ→0,u(k)≈u2(k),即控制器的输出主要取决于模糊免疫PID控制。由此,实现了模糊控制的粗调和模糊免疫PID的细调这2个衔接紧密的阶段,使得控制系统的动态响应和控制精度都有显著提升;同时,2种智能算法的融合进一步提高了控制器的鲁棒性。
2.3.2模糊控制器的阶段优化
在用免疫算法对模糊控制进行优化时,隶属函数和控制规则是免疫算法进行模糊控制器优化的主要对象,传统的模糊免疫算法大都采用同步优化的方式。考虑到同步优化时搜索的复杂性,本文提出模糊控制的阶段优化方法。对于模糊控制器而言,输出比例因子的变化将直接影响控制器的增益;而输入比例因子的改变本质上是模糊控制规则论域的变化。因此,比例因子对系统性能具有更大的影响,故将比例因子视为全局变量,隶属函数作为局部变量。免疫算法优化的第一阶段的对象为受全局变量影响的控制规则,第二阶段为隶属函数的优化。其中,隶属函数的寻优又可细分为2个部分:①在比例因子和量化因子的作用下,将输入输出变量映射到对应的模糊论域;②在该论域中进行参数寻优,确定各模糊子集。
2.3.3模糊免疫控制器设计流程
模糊控制器免疫优化流程如图3所示。
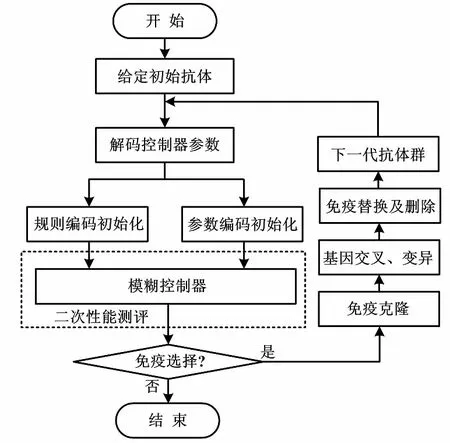
图3 模糊控制器免疫优化流程图
首先,依据现有的知识形成初始规则集,对输入输出空间进行初步划分,在设定的模糊论域中粗略地确定隶属函数。在已有的模糊控制器隶属度函数的前提下设定比例因子的初始值,并应用免疫算法对其优化。优化时,计算每次变异所得B细胞的亲和力,并选择群体中个最优B细胞进行克隆复制,生成新的临时群体。然后,对该群体执行交叉、变异操作,变异的概率与亲和度大小成反比,从而形成一个逐渐成熟的群体,并对原有群体中亲和度较低的个体进行替换或删除。对每一部分都进行免疫寻优的操作直至满足寻优要求。选定最优比例因子所对应的隶属函数为当前值,并准备下一次优化时进行隶属函数的更新,最终得到精确的隶属函数。最优个体保留策略能够确保群体的最优进化曲线呈现单调递增的特性,该特性确保比例因子和隶属函数优化的过程中个体的评价值也是单调递增的。免疫算法反复寻优直至达到迭代的终止条件,以此确定最优解。
3 低速域转速控制试验研究
3.1模糊免疫PID仿真分析
干扰或噪声的存在势必对控制精度产生较大的影响,空调压缩机受到温度场的影响,而温度系统特有的滞后性、多变性、复杂性使传统PID控制器很难实现稳定控制,且其参数的设定也需要反复的试验,甚至不能较好地保证常规模糊免疫控制精度。
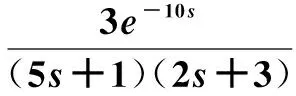

图4 阶跃响应曲线图
从图4可以看出,优化后的模糊免疫PID控制具有更快的响应速度,稳定时间更短,波动也更小。
3.2电机转速控制仿真分析
为进一步验证优化的模糊免疫PID控制器作为速度调节器在压缩机转速控制系统低速域脉动抑制中的优越性,以MATLAB/SIMULINK为平台搭建仿真模型。IPMSM仿真参数如表1所示。

表1 IPMSM仿真参数
为验证优化模糊免疫PID速度调节器对低转速的有效控制,将压缩机的给定转速设置为30r/min,并当仿真时间为0.3s时,将给定转速值设定为35r/min。图5为应用模糊免疫PID和优化的模糊免疫PID控制算法的压缩机转速控制波形图。
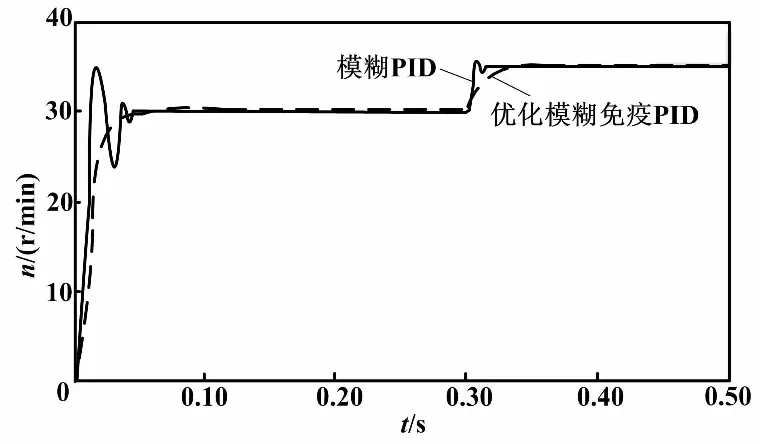
图5 转速控制波形图
从图5可以看出,优化后的转速虽然在前期上升速度略逊于优化前,但是在优化模糊免疫PID控制下,压缩机在更短的时间内达到给定转速,且有效消除系统超调量,使稳态精度更精确。同时,当给定转速发生变化时,其跟踪转速给定值的动态响应速度也较快。在优化的模糊免疫PID速度调节器控制下,当给定转速为30r/min时,输出转速范围为30.12~29.93r/min,转速误差仅为0.4%,远高于2%的工业精度。
4 结束语
本文在传统模糊免疫算法的基础上,对该算法进行模式切换、并行寻优和阶段优化3方面的改进,设计了基于优化的模糊免疫PID智能转速调节器,并将其应用于变频空调压缩机的低速域转速控制系统。通过仿真,验证了控制器可以有效控制二阶纯滞后系统,较大程度地提高了控制精度;同时,转速控制的仿真结果充分说明了基于优化的模糊免疫PID转速调节器在转速控制上所具有的可行性和优越性。该研究为变频空调压缩机的低速域控制研究提供了新的解决思路,具有一定的应用价值。
[1] 陈灏.变频调速系统电磁兼容研究[J].自动化仪表,2015,36(9):57-60.
[2] 朱应煌.变频器在空气压缩机恒压控制中的应用[J].自动化仪表,2009,30(1):66-69.
[3] 彭道刚,张浩,杨平,等.基于灰色预测的汽温模糊免疫PID控制[J].动力工程学报,2007,27(1):72-75.
[4] 张小鸣,龙仕玉.基于DSP直流电机模糊免疫PID控制器研究[J].电气传动,2013,43(2):65-68.
[5] 樊立萍,马怀通,刘义.基于模糊免疫PID的轧机液压位置自动控制[J].电气传动,2015,45(2):58-62.
[6] 焦竹青,屈百达,徐保国.基于PID模糊免疫的永磁同步电机调速系统[J].电气传动,2007,37(12):49-52.
[7] 史宇超,孙凯,黄立培,等.内埋式永磁同步电机宽调速范围运行控制策略[J].清华大学学报(自然科学版),2012,52(11):1565-1570.
[8] 刘芳,曹江涛,李平.水箱液位的模糊免疫PID控制[J].自动化仪表,2013,34(8):46-49.
[9] 汪兆栋,文小琴,游林儒,等.IPMSM宽速域范围无位置传感器高性能控制[J].华南理工大学学报(自然科学版),2015,43(9):1-7.
[10]刘其堂.内埋式永磁同步电机控制方法研究[D].武汉:华中科技大学,2012.
[11]夏长亮,刘丹,王迎发,等.基于模糊规则的无刷直流电机免疫PID控制[J].电工技术学报,2007,22(9):68-73.
[12]史婷娜,张典林,夏长亮,等.基于遗传整定的永磁交流伺服系统模糊免疫PID控制器[J].电工技术学报,2008,23(7):45-50.
ResearchontheSpeedControlBasedonImprovedFuzzyImmunePIDforInverterAir-ConditionerinLowSpeedDomain
FU Guangjie1,LI Xinpeng1,QIAO Yongna1,MU Haiwei2
(1.Department of Electrical Engineering and Information,Northeast Petroleum University,Daqing 163318,China;2.Department of Electronics Science,Northeast Petroleum University,Daqing 163318,China)
Considering the problem of high fluctuation of speed of the compressor in inverter air conditioner running in low speed domain,the improved fuzzy immune PID intelligent speed controller is designed with the maximum torque current ratio control system of interior permanent magnet synchronous motor(IPMSM)as the platform.The optimized speed controller uses immune algorithm to carry out staged optimization for membership function and control rules,thus the complexity of calculation can be greatly reduced.In addition,the weighting factor is introduced to realize the control mode transformation between fuzzy control and fuzzy immune PID control.The improved fuzzy immune PID controller will overcome the shortcomings of traditional fuzzy immune PID which only optimizes the proportional coefficient;it can realize the real-time optimization of the immune system with proportional,integral and differential parameters.In order to verify the effectiveness of the improved controller,with MATLAB as the platform and the dead time system as the control object,the control effects of improved and traditional fuzzy immune PID controllers for step response are compared,the result shows that the improved controller has higher control precision and less rise time.By adopting the improved fuzzy immune PID controller to replace the traditional speed controller in control system,the response speed of the compressor in low speed domain and the steady state accuracy are obviously improved.
Frequency conversion technology; PID controller; Permanent magnet synchronous motor(PMSM); Low speed domain control; Fuzzy immune algorithm; Optimization; Control mode
TH7;TP29
A
10.16086/j.cnki.issn1000-0380.201710001
修改稿收到日期:2016-12-06
国家自然科学基金面上资助项目(51374072)、东北石油大学研究生培养创新基地创新科研项目(YJSCX2015-028NEPU)、东北石油大学培育基金项目(py120219)
付光杰(1962—),女,博士,教授,博士生导师,主要从事电力电子技术与控制方向的研究工作。E-mail:fgjmhw@163.com。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
科技视界(2017年8期)2017-07-31
科技创新与应用(2017年6期)2017-03-23
消费者报道(2015年6期)2015-01-04
