
机器人智能碰撞传感器的设计与仿真*
2017-11-01 07:19林义忠黄冰鹏覃尚活姚建余
传感器与微系统 2017年10期
林义忠, 黄冰鹏, 李 盛, 覃尚活, 姚建余
(广西大学 机械工程学院,广西 南宁 530004)
设计与制造
机器人智能碰撞传感器的设计与仿真*
林义忠, 黄冰鹏, 李 盛, 覃尚活, 姚建余
(广西大学机械工程学院,广西南宁530004)
为了提高机器人手部发生触碰时的安全防护性能,在触碰的瞬间能实现急停,确保设备和人员的安全,设计了一种具有惯性检测的电磁伺服型高灵敏度碰撞传感器,主要采用“惯性感知+电磁伺服”的方式,动态剔除惯性力成分,使碰撞传感器仅对碰撞力反应,提高了机器人手部的触碰灵敏度。计算表明:碰撞触发力的阈值由24.73 N降低到了12.88 N;相比传统的碰撞传感器,其灵敏度大幅提高,进一步提高了机器人的安全防护性能,具有一定的理论价值与工程应用价值。
机器人; 碰撞传感器; 电磁伺服; 惯性感知
0 引 言
随着机器人应用领域不断扩展,对机器人安全防护性要求越来越高;尤其是在人机交互领域,安全性是首要的前提问题[1,2]。目前,用于机器人的防碰撞安全措施均无法确保机器人完全规避碰撞,在机器人实际工作中,难免存在一些柔性碰撞或者非常规碰撞。因此,外部碰撞传感器是机器人安全防护的最后一道防线,可以使机器人在发生碰撞的瞬间紧急停止,确保设备和人员的安全。
目前,机器人采用的外部碰撞传感器主要有:开关型碰撞传感器[3],无法克服手部及工具的惯性力,灵敏度较低;腕力传感器[4],碰撞时无法产生变形和缓冲,不能够形成较好的保护;皮肤感知碰撞传感器[5],材料强度低、抗干扰能力差,易产生误报信号;通过驱动电流检测方式判断碰撞的发生[6],该方法理论上可行,且无需加装传感器,但判断的准确率不高。
本文提出了一种机器人碰撞检测的新方法——电磁伺服型高灵敏度智能碰撞检测,可检测出机器人的微小碰撞,大幅度提高了机器人的安全系数。
1 智能碰撞传感器工作原理
碰撞传感器的电气系统主要由加速度传感器模块、数/模转换器模块、伺服电磁铁模块、控制器模块和驱动模块组成。其工作原理是:加速度传感器模块检测机器人末端的加速度并将加速度传给控制器模块→经过控制器处理输出给数/模转换器→数/模转换器将相应的数字信号转换成模拟信号并传给驱动模块→驱动模块输出伺服电磁铁模块需要的电流→伺服电磁铁输出电磁吸力平衡机械手的惯性力。由于伺服电磁铁的电磁吸力与加速度成比例关系,而机械手的惯性力与加速度也成正比关系,因此,可通过控制器的调节,使伺服电磁铁的电磁吸力与机械手的惯性力相平衡。
2 碰撞传感器结构与灵敏度分析
碰撞传感器主要由壳体、底板、输入轴、导力块、压力弹簧、滚珠、楔形机构及触点开关组成[3]。因所设计的碰撞传感器电磁吸力根据机器人末端加速度的变化而变化,故在碰撞传感器内加入伺服电磁铁模块和加速度传感器模块,并将楔形机构及触点开关设计成接触开关的形式。传感器的内部结构如图1所示。
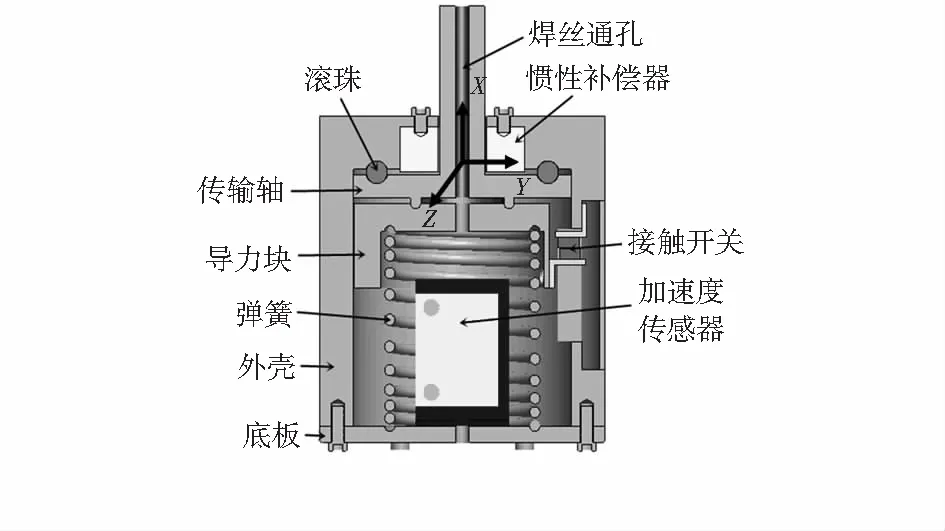
图1 碰撞传感器内部结构
弹簧安装在底板与导力块之间,其预紧力的大小与焊枪的重量有关。其预紧力由式(1)确定
F′×s=G×l
(1)
式中F′为弹簧的预紧力,N;s为弹簧轴线到滚珠中心的距离,取25.5mm;G为焊枪的重力,N;l为焊枪等效重力作用点到滚珠中心的距离,依据焊枪的形状以及其质量分布,取100mm。经计算,F′=31N。
由图1知,加速度传感器模块处于弹簧的内部,因此弹簧的中径D不易过小。取D=40mm。取弹簧旋绕比C=10,弹簧与导套间的间隙为2mm,以及弹簧的钢丝线径d=4mm。一般地,弹簧的螺旋升角α取5°~9°,根据弹簧升角公式[7]

(2)
式中 弹簧节距p=12mm。计算得到α=5.5°,符合弹簧升角要求。取弹簧的切变模量为8300MPa,则弹簧的弹性刚度为

(3)
则碰撞传感器所用弹簧的预紧压缩量为

(4)
传统的碰撞传感器,由于没有伺服电磁铁提供的吸力,故其弹簧的预紧力需要考虑机器人变速时所产生的惯性力对弹簧与接触开关的影响。经计算,焊枪的最大惯性力为11.85N,考虑焊枪如图2所示的形式发生碰撞。假设弹簧的形变增加2mm时,碰撞传感器的接触开关断开。
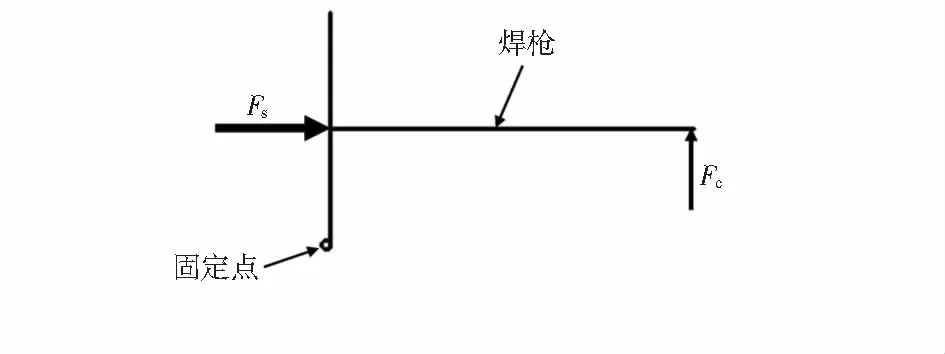
图2 碰撞示意
传统碰撞传感器在碰撞时需要克服焊枪的重力以及弹簧的预紧力,才能挤压弹簧带动接触开关断开,其碰撞力为

(5)
本文设计的智能碰撞传感器,由于加入了加速度传感器模块以及伺服电磁铁模块,剔除了惯性力成分,其碰撞力为

(6)
对比式(5)和式(6)可知,本文设计的智能碰撞传感器灵敏度大幅提高。
3 电磁伺服模块设计与仿真
根据麦克斯韦电磁学可知电磁吸力公式[8]为
(7)
式中F为电磁吸力,J/cm;B为气隙的磁感应强度,Wb/cm2;S为伺服电磁铁磁极的表面积,cm2;μ0为空气导磁系数,H/cm,μ0=1.25×10-4H/cm。磁路的模型如图3。

图3 磁路模型
根据磁路欧姆定律
IW=Φm×(R0+R1+R2)×10-8
(8)
式中IW为磁路的磁动势(I为线圈的电流,W为线圈的匝数);Φm为磁路的磁通;R0为空气的磁阻;R1为内外圆环的总磁阻;R2为衔铁的磁阻。
由于空气的磁阻较衔铁与铁芯大得多,因此,考虑磁路的磁通全部消耗在空气气隙上。考虑漏磁通等其他因素的影响,磁通为
Φ0=IW×G0×108(1-5%)
(9)
式中G0为气隙的磁导,其表达式为
(10)
式中δ为气隙长度;S1为伺服电磁铁外圆环相对截面积;S2为内圆环相对截面积。由式(7)、式(9)与式(10)得

(11)
式中D1为伺服电磁铁外圆环大径;D2为外圆环小径;D3为内圆环大径;D4为内圆环小径。
将δ=0.5mm,D1=40mm,D2=37mm,D3=20mm,D4=15mm,F=46.5N 代入式(11)并整理得IW=424A·匝。取W=2050匝,则线圈中的电流I=0.207A。
根据所得的伺服电磁铁参数在Maxwell中建立模型,并对其进行电磁吸力仿真。其电磁吸力如图4,纵轴为电磁吸力,N;横轴为时间,ms。

图4 电磁吸力随时间变化
由图4知,仿真的最大电磁吸力靠近46.5N。因此,所设计的伺服电磁铁参数合理。
4 智能碰撞传感器控制
根据智能碰撞传感器的工作原理,所需的电气元件包括:加速度传感器模块、控制器模块、数/模转换模块以及驱动模块。利用加速度传感器测量机器人末端的加速度,通过控制器模块实现加速度信号的传递和处理。数/模转换模块将处理过的数字信号转换成模拟信号并传送至驱动模块,最后由驱动模块输出与加速度信号对应的电流。信号间的传输流程如图5。

图5 信号传递流程
本文采用GY—2913轴加速度传感器模块[9],分辨率高,输出格式为16位补码形式。数/模转换器采用集成PCF8591转换芯片的YL—40转换模块,通过该芯片的I2C串口控制数/模转换器的输入数字量,即可控制其模拟输出量,从而控制驱动器的输出电流。智能碰撞传感器需要采集机器人末端的加速度,加速度信号的传输与转换。因此控制程序分为3部分:加速度信号采集程序、信号传输程序、信号转换程序。
5 智能碰撞传感器实验
智能碰撞传感器如图6。可以看到,接触开关的一个触点安装在碰撞传感器的侧面,另一触点安装在导力块上,随导力块运动。当碰撞力大于某一设定值时,接触开关断开,机器人停止工作。
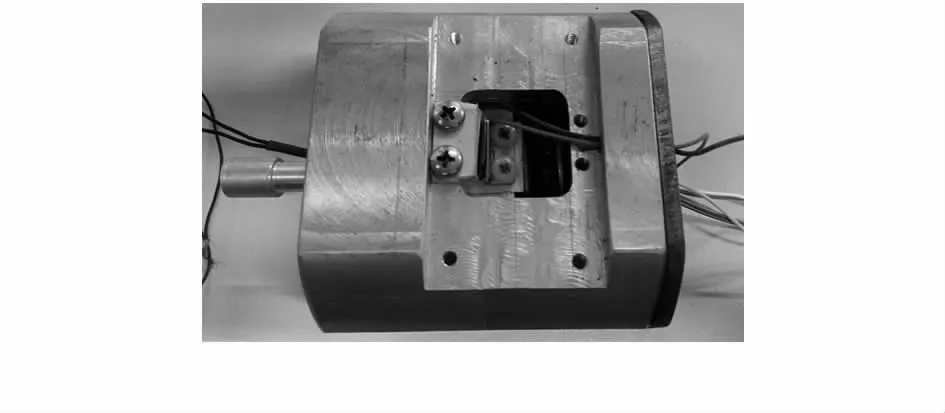
图6 碰撞传感器实物
伺服电磁铁作为智能碰撞传感器的关键部件,其性能决定了碰撞传感器工作的可靠性。现对伺服电磁铁的电磁吸力进行实验,相应的数据如表1。可知:电磁吸力随电流变化而变化,电磁吸力最大值与理论所需的最大值相差不大,因此,伺服电磁铁符合要求。
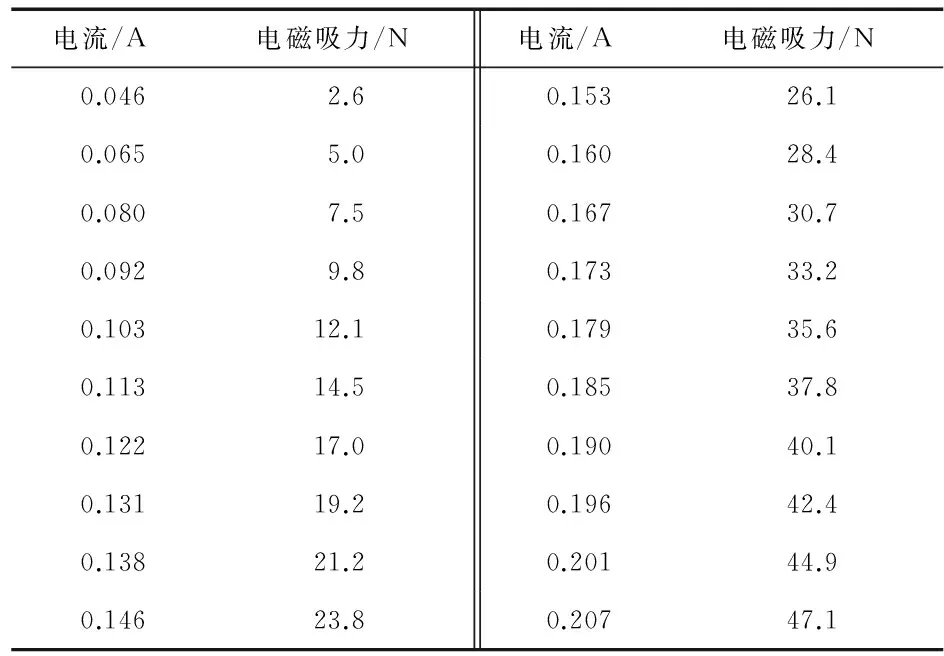
表1 电磁吸力与电流关系表
将碰撞传感器安装在机器人末端,检测其在不同方位下,使接触开关断开所需的碰撞力。所得的碰撞力趋势如图7。可知,离滚珠中心越远,使接触开关断开的碰撞力越小。此外,不同方向在同一位置的碰撞力也不尽相同,这与接触开关的安装位置和碰撞传感器加工精度有关。

图7 碰撞力趋势
分别使智能碰撞传感器的输入轴处于铅直和水平方向,检测接触开关在机器人突然启动或停止时是否断开。当输入轴处于铅直方向时,加速度最大值为0.405gn(1gn=10 m/s2,下同),接触开关未断开;当输入轴处于水平方向时,加速度最大值为0.295gn,接触开关未断开。因此,该智能碰撞传感器在机器人突然启动或停止时能可靠工作。
6 结束语
采用“惯性感知+电磁伺服”的方式,动态剔除惯性力成分,使碰撞传感器只对碰撞力做出反应,相对传统的碰撞传感器,其灵敏度得到提高的同时也保证了设备和人员安全;在机器人突然起、停而造成惯性力突变时,传感器不会发生误判反应;为机器人防碰撞领域的研究提供了一定参考价值。
[1] 吴海彬,杨剑鸣.机器人在人机交互过程中的安全性研究进展[J].中国安全科学学报,2011,11:79-86.
[2] 胡 政.机器人安全性工程研究综述[J].中国机械工程,2004(4):90-95.
[3] 陈海初.焊接机器人三维防碰撞力传感器的设计[J].林业机械与木工设备,2007,35(3):30-31.
[4] Lu Shujun,Chung J,Velinsky S.Human-robot collision detection and identification based on wrist and base force/torque sensor-s[C]∥IEEE International Conference on Robotics and Automation,Barcelona,Spain,2005:3796-3801.
[5] 卢朝洪,梅 涛,骆敏舟,等.一种用于机器人手爪的PVDF接触力传感器设计[J].压电与声光,2006(3):311-313.
[6] Yamada Y,Suita K,Imai K,et al.A failure-to-safety robot system for human-robot coexistence[J].Robotics and Autonomous Systems,1996,18:283-291.
[7] 曹宝林.园柱螺旋弹簧计算法[J].山东工学院学报,1963(2):55-64.
[8] 陈兴达.新型盘式比例电磁铁的研究[D].杭州:浙江大学,2009.
[9] 李兴法,尹冠飞.数字式加速度传感器ADXL345的原理及应用[J].黑龙江科技信息,2010(36):2-14.
Designandsimulationofintelligentcollisionsensorforrobot*
LIN Yi-zhong, HUANG Bing-peng, LI Sheng, QIN Shang-huo, YAO Jian-yu
(CollegeofMechanicalEngineering,GuangxiUniversity,Nanning530004,China)
In order to improve safety protection performance of robot hand when the collision happens,at the moment of the touch can achieve emergency stop,to ensure the safety of equipment and personnel,design an electromagnetic servo type high sensitivity impact sensor with inertial measurement,mainly uses the "inertia perception+electromagnetic servo"mode,dynamically eliminate inertial force components,which make collision sensor only responses to the collision force,improve the touch sensitivity of robot hand.Calculation result shows that the collision force is reduced from24.73N to12.88N;compared to traditional collision sensor,its sensitivity is greatly improved.Further improve the safety protection performance of the robot,and has a certain theoretical value and engineering application value.
robot; collision sensor; electromagnetic servo;inertia perception
2016—10—28
广西科技攻关项目(1348012—10)
10.13873/J.1000—9787(2017)10—0070—03
TH 122
A
1000—9787(2017)10—0070—03
林义忠(1964-),男,工学博士,教授,研究方向为工业机器人技术、机电计算机控制,E—mail:xautlyz@163.com。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
小猕猴智力画刊(2022年10期)2022-11-02
化工管理(2022年11期)2022-06-03
锻压装备与制造技术(2021年2期)2021-07-19
防爆电机(2021年2期)2021-06-09
机械工程师(2020年12期)2020-12-23
中学物理·高中(2019年8期)2019-09-20
时代农机(2019年5期)2019-08-17
少年科学(2015年7期)2015-08-13
微特电机(2013年3期)2013-06-19
