
无线遥控步行插秧机的设计与试验
2017-11-01 23:03陈训教吕志军薛向磊喻擎苍于友朋
农业工程学报 2017年17期
陈训教,吕志军,薛向磊,辛 亮,喻擎苍,于友朋,赵 匀
无线遥控步行插秧机的设计与试验
陈训教1,吕志军1,薛向磊1,辛 亮1,喻擎苍2,于友朋1,赵 匀1※
(1. 东北农业大学工程学院,哈尔滨 150030;2. 浙江理工大学信息学院,杭州 310018)
无线遥控步行插秧机有广阔的市场前景和应用价值,在不借助人力的情况下,田间地头原地180°转向是一大难题。为此,作者发明了一种具有升降功能的辅助行走机构,在田间地头借助大幅度升降功使浮板能够完全脱离泥面,减少转向阻力。在分析了该机构的结构特点及工作原理基础上,建立了机构的运动学模型,开发了基于Visual Basic6.0的计算机辅助优化设计与分析软件,并结合“参数导引”启发式优化算法快速优化求解得到满足辅助行走机构工作要求的一组参数,基于优化所得参数进行结构设计,并进行了物理样机加工试制与装配。同时,开发了末端气动执行系统和基于串口通信的无线遥控系统。在规格为10 m×20 m,泥脚深度为15~25 cm的水田中进行田间试验,将插秧机的行走速度设定为0.45和0.90 m/s,试验结果表明,在无线遥控状态下,该机型可以完成插秧、直线行驶、全自动90°转向和田间地头原地180°转向。辅助行走机构和控制系统满足无线遥控步行插秧机在田间正常作业要求,验证了机构和控制系统的可行性。
遥控;设计;试验;步行插秧机;辅助行走机构;参数导引启发式优化算法;气动执行系统;串口通信
0 引 言
科学技术的进步推动着现代农业生产向着自动化、信息化、规模化和精确化方向快速发展[1]。农机智能化研究特别是无人驾驶技术在现代农业技术上的研究越来越深入,逐渐成为农业工程技术智能化研究的重要组成部分[2],它包括:遥控和图像识别田间作业机器的直线、转向行驶、全自动90°转向、田间地头原地180°转向、核心作业部件的启动和终止。在整个作业过程中,确保机器等行距行驶。
步行插秧机是3种类型(高速、普通乘坐和步行插秧机)中唯一双脚与土地长时间接触的作业方式。由于北方寒地插秧季节气候寒冷,双脚与冰冷的土地接触,是一项非常艰苦的劳动,年复一年,很多农民患上了关节炎等疾病,但是,步行插秧机由于其轻便、操作灵活、过埂和防陷性能好,特别适用于泥脚深的小块水田,是一种不可或缺的机型。将步行插秧机配备无人驾驶技术,可以免去农民下田的生产环节,此外,该技术产业化成本低,而且可以充分发挥回转式分插机构的高效率作业。
日本是最早进行农业机械智能化相关方面研究的国家,在水稻插秧机无人驾驶研究方面也处于领先地位。日本插秧机只有2种机型:高速乘坐式和手扶步行式,30年前,步行插秧机进入市场,数量是高速插秧机的2倍,但由于其对农民身体的伤害(日本处于寒温带,与中国东北气候相同),目前步行插秧机已经萎缩到全部产量的1%,大多数都改为高速乘坐式,为了适应小田块的作业,过去的4行步行插秧机都变成高速乘坐式。日本的无人驾驶插秧机也没有达到产业化地步,其研究仅局限于乘坐式。日本国家农业研究中心的Nagasaka等针对乘坐式水稻插秧机的无人驾驶进行了系统研究[3-5],他们对操作机构进行改造,并在插秧机上安装了电脑、GPS和光纤陀螺仪,在50 m×10 m的稻田中用无线Modem对插秧机进行导航,试验显示,直线行走速度为0.7 m/s时偏差为5.5 cm,而转弯时偏差为10 cm。北海道大学的Kaizu等运用机器视觉理论进行了无人驾驶方面的研究[6-7],开发了双谱照相秧苗检测系统,有效消除水面反光及田边绿色倒映物等噪声影响,整体导航效果较好。
国内最早从事这方面研究的是华南农业大学的罗锡文院士,他针对乘坐式水稻插秧机的无人驾驶进行了系统研究[8-12],对插秧机操作机构进行改造,将计算机、传感器、GPS和数据通讯技术等集成融合开发出了多种自动控制系统,其中开发的基于CAN(controller area network)总线的分布式控制系统在久保田SPU-68型插秧机上进行了道路跟踪试验和田间作业试验,结果表明,道路直线跟踪偏差小于0.05 m,田间作业试验直线跟踪偏差不大于0.2 m,插秧机能够自主完成路径跟踪、转向、变速以及插秧等操作,满足水田插秧作业要求。南京农业大学的姬长英、周俊等以机器视觉为基础[13-18],并融入小波变换、卡尔曼滤波等理论构建了视觉导航实验平台,以农用轮式移动机器人载体进行了大量无人驾驶试验并取得良好的效果。中国农业机械化科学研究院的伟力国等以XDNZ630型水稻插秧机为试验平台,运用GPS技术,实现了插秧机的自动对行导航及地头转向[19]。并进行了插秧机路面与田间导航跟踪试验,结果表明,车辆行进速度不大于0.6 m/s时,对行跟踪偏差小于10 cm,基本满足插秧作业精度要求。此外,浙江大学的张方明博士在其博士论文中提出了几种有效的田间路径识别算法[20],并以乘坐式水稻插秧机为载体进行自动导航研究,取得了不错的效果。从以上研究现状看,目前的无人驾驶集中在GPS和机器视觉的应用上。该研究摒弃通常无人驾驶采用的GPS系统,转而借助无线遥控、图像处理和自动控制3种方式融合完成步行插秧机无人驾驶田间作业,并在田间作业过程中尽量减少无线遥控操作。
为实现步行插秧机无人驾驶作业,该研究完成了无线遥控部分和机械部分,并申请了机械部分的相关发明专利(专利号:CN201510648987.2)和软件著作权(登记号:2017SR379283),插秧机在无线遥控下可以完成直线行驶、转弯、插秧及田间地头原地180°转向等。步行插秧机田间地头180°原地转向可以借助人工辅助操作实现,但在无线遥控作业中,如果机器未被抬升至一定的高度,浮板就会壅泥壅水,无法完成原地转向动作。作者发明了一套具有大幅度升降功能的辅助行走机构,以保证插秧机无线遥控状态下顺利在田间直线行走、平稳升降和原地180°转向。为获得优化设计参数,自主开发辅助优化软件并结合“参数导引”启发式优化算法[21]进行快速优化求解,并进行了物理样机研制,同时开发了基于串口通讯的控制系统和将控制指令转换为插秧机动作的末端气动执行系统,最后进行田间试验,验证了机构和控制系统的可行性。
1 辅助行走机构的设计要求和工作原理
1.1 设计要求
步行插秧机在无人驾驶田间作业过程中,辅助行走机构须满足以下2个要求:
1)保证插秧机始终处于水平状态。为保证插秧效果,辅助行走机构应能使插秧机在插秧和升降过程中尽量保持水平状态,以保证达到平起平降效果及稳定的插秧角度和深度。
2)保证插秧机在直线、转弯行走过程中的等行距作业和田间地头原地180°转向。为保证插秧效果,方便后期管理和收割,插秧机需直线行走并保持等行距作业[19];在田间地头原地180°转向时,辅助行走机构应能使插秧机被抬升至最高状态时,浮板与泥面完全分离,达到不壅泥壅水的效果。
1.2 工作原理
根据设计要求,发明了一种辅助行走机构如图1所示(红色部分),该机构由摇杆滑道机构(推杆1、摆杆2、活塞杆和插秧机机体)、双摇杆机构(摆杆2、长拉杆4、下摆杆8和插秧机机体)和平行四杆机构(上摆杆6、支撑杆7、下摆杆8和插秧机机体)串联组合而成,且巧妙地运用了插秧机自身的动力装置,与插秧机携带的液压升降机构形成并联,协同完成插秧机的升降动作。当插秧机插秧时,尾轮9与驱动轮3的相对位置保证插秧机处于水平状态,以确保稳定的插秧深度和角度;当插秧机需要田间地头原地180°转向时,插秧机液压升降系统通过驱动自身升降机构使中间驱动轮3下降,同时液压升降系统中的活塞杆驱动推杆1向右运动,推杆1驱动摆杆2下端向左运动,摆杆2与长拉杆4相铰接,长拉杆4拉动由固定杆5固定在手扶架上的上摆杆6、支撑杆7和下摆杆8组成的平行四杆机构总成向左运动,从而带动尾轮9下降,由中间驱动轮3和尾轮9的下降运动使插秧机升至一定高度后,最终使插秧机浮板完全脱离泥面,顺利完成田间地头原地180°转向。

1.推杆 2.摆杆 3.驱动轮 4.长拉杆 5.固定杆 6.上摆杆 7.支撑杆 8.下摆杆 9.尾轮
2 辅助行走机构运动学模型建立
如图2所示为辅助行走机构简图,建立以液压升降机构中仿形臂铰链点为原点、水平方向为轴(向右为正)、竖直方向为轴(向上为正)的坐标系,并规定以逆时针方向为正[22]。
根据图2建立机构的封闭矢量方程




将矢量方程转换为解析形式,得出各运动点的位移方程,其中,固定铰链点的坐标(x,y)、固定铰链点的坐标(x,y)、固定铰链点的坐标(x,y)、固定铰链点的坐标(x,y)、焊接点的坐标(x,y)、焊接点的坐标(x,y)和活塞杆末端点的纵坐标1为已知常量。
活塞杆末端点的位移方程为

注:la为 A点横坐标;h1为 A点纵坐标;l1为杆AB的长度;l2为杆BC的长度;l3为杆CD的长度;l4为杆AE的长度;l5杆EF的长度;l6杆FG的长度;l7杆PJ的长度;l8杆JL的长度;l9为杆LK的长度;l10为杆IJ的长度;l11为杆IH′的长度;l12为杆H′H的长度;l13为杆GH的长度;l14为杆KM的长度;l15为杆NO的长度;α为 CB与CD夹角;β为CA的向量角;γ为CB与CA夹角;α1为 FE的向量角;β1为FA与FE夹角;γ1为FA的向量角;α2为GI与GE夹角;β2为GH与GI夹角;γ2为GE的向量角;α3为 HI与HH’夹角;γ3为HI的向量角;γ4为 NO与NM夹角;β3为KM的向量角;θ为手扶架倾角;θ1为H′I与H′H夹角;θ2为尾轮倾斜角;r为尾轮半径。
Note: la refers to abscissa of point A; h1 refers to ordinate of point A; l1 refers to length of rod AB; l2 refers to length of rod BC; l3 refers to length of rod CD; l4 refers to length of rod AE; l5 refers to length of rod EF; l6 refers to length of rod FG; l7 refers to length of rod PJ; l8 refers to length of rod JL; l9 refers to length of rod LK; l10 refers to Length of rod IJ; l11 refers to length of rod IH′; l12 refers to length of rod H′H; l13 refers to length of rod GH; l14 refers to Length of rod KM; l15 refers to length of rod NO; α refers to included angle of CB and CD; β refers to vector angle of CA; γ refers to included angle of CB and CA; α2 refers to vector angle of FE; β1 refers to included angle of FA and FE; γ1 refers to vector angle of FA; α1 refers to angle of GI and GE; β2 refers to included angle of GH and GI; γ2 refers to vector angle of GE; α3 refers to included angle of HI and HH′; γ3 refers to vector angle of HI; γ4 refers to included angle of NO and NM; β3 refers to vector angle of KM; θ refers to inclination angle of Hand-frame; θ1 refers to included angle of H′I and H′H; θ2 refers to inclination angle of tail-wheel; r refers to radius of tail-wheel.
图2 辅助行走机构简图
Fig.2 Simplified diagram of walking aided mechanism
液压升降机构中仿形臂与拉杆铰接,由此得出铰链点的位移方程为

其中

摆杆与推杆铰接与点,与长拉杆铰接于,由固定铰链点推出铰链点和点的位移方程为
其中


其中


其中


其中
由支撑杆铰链点的位移方程推导尾轮轮心的位移方程为
3 辅助行走机构多目标参数优化
3.1 变量与优化目标分析
根据辅助行走机构的结构特点和无线遥控步行插秧机作业要求,优化时,需考虑以下优化目标:
3)机构运动过程中与插秧机不发生运动干涉,即推杆与插秧机箱架、秧盘托架底板不发生碰撞;长拉杆与秧门不发生碰撞。
4)插秧机在田间作业时处于水平状态,当插秧机初始状态时为水平状态时,尾轮与中间驱动轮的升降高度尽可能相等,且插秧机被抬升至最高位置时浮板应脱离泥面。
5)尾轮半径不宜过小,应大于平均泥脚深度(200 mm),防止轮子陷入泥中而增加行驶阻力。
6)驱动轮与尾轮的升降速度在竖直方向上尽可能相等,使插秧机达到平起平降的效果。
辅助行走机构优化模型的已知变量为液压升降系统的液压行程170 mm及点横坐标l;优化设计变量有:杆长4、杆长5、杆长6、杆长7、杆长8、杆长9、杆长10、杆长11、杆长12、杆长13、杆长14、杆长15、尾轮半径、与夹角1和尾轮倾斜角2。
3.2 辅助行走机构优化设计与分析软件开发
通过分析变量与优化目标,辅助行走机构的优化属于多目标(9个目标)、多参数(16个参数)、强耦合性复杂优化问题[22,24-27]。该研究采取课题组提出的“参数导引”启发式优化算法进行优化求解,其基本原理如图3所示。根据辅助行走机构数学建模所得运动学方程,开发了基于VB可视化编程平台的辅助行走机构优化设计与分析软件,如图4所示,并将“参数导引”启发式优化算法嵌入软件中,同时将优化目标转换为数学方程,再将数学方程转换为目标函数,并在优化软件中数字化显示,通过进度条的形式直观地显示优化效果,红色显示条越长,表明优化目标越接近理想值[21],同时结合农艺要求,为优化出满足要求的参数提供依据[28-30]。需要注意的是,待优化的机构设计参数初始值的选取必须满足机构运动条件,否则,无法进行优化计算。例如,选取辅助行走机构中推杆1(图2中的杆)和摆杆2上部分(图2中的杆)长度值的时候,需要满足当活塞杆末端点运动至任何位置时,杆和杆长度之和大于活塞杆末端点与铰链点之间的距离,否则,机构将无法运动。

图3 “参数导引”启发式优化算法程序框图

图4 优化软件界面
3.3 优化结果与分析
根据以上分析,借助专家经验,运用优化设计与分析软件并结合“参数导引”启发式优化算法进行快速优化求解,当目标值显示区域的所有进度条均呈现为红色时,此时,优化软件中参数输入区域中的参数满足优化目标要求,即为满足辅助行走机构工作要求的参数。此外,红色的进度条越长,说明目标函数值越靠近预设的理想值,所对应的参数也就越好,该组参数为结构设计、装配图及零件图绘制提供依据,优化完毕的一组机构参数值和所对应的函数目标值分别如表1和表2所示。
在软件参数栏中输入优化参数,经分析计算后得到活塞杆伸出长度与插秧机的升降高度和在升降过程中整机倾斜度变化关系如图5所示。当活塞杆伸出长度最大时(170 mm),中间驱动轮下降高度为244 mm,后端尾轮下降高度为229 mm,插秧机整机倾斜度小于2°,最大值为1.2°,且辅助行走机构与插秧机机体不发生干涉,满足3.1节所述的相关优化目标要求。

表1 辅助行走机构优化模型的参数初始值与优化值

表2 辅助行走机构优化模型的目标初始值与优化值

图5 升降高度和倾斜度理论变化曲线
4 控制系统设计与田间试验
4.1 气动执行模块设计
气动执行模块作为控制系统的终端,是将控制指令转换为插秧机的实际动作实现自主作业。如图6所示为气动执行模块原理图,DC为24 V稳压电源,V为电压表,F为逆变器,将24 V直流电转换为供电动机(气泵)M所用的220 V交流电,H为空气滤清器,G为压力表,C1~C7为气缸,E1~E7为控制气缸通断的电磁阀,电磁阀的编号与气缸编号一一对应。为了稳定系统压力,在气泵与气缸之间安装减压阀D和压力继电器K(设定压力值为0.7 MPa),并安装压力开关S1(初始状态为闭合状态),当系统压力超过设定值,压力继电器发送信号,将压力开关S1断开,停止供压,同时减压阀D开启,降低系统气压。当系统压力低于设定值,压力继电器再一次发出信号,将压力开关闭合,启动供压,从而保证系统的正常工作且节约能源。当插秧机档位操作杆放在中立位置时,气缸通断组合与对应的插秧机动作如表3所示,其中“√”代表气缸被接通,“×”代表气缸被切断。
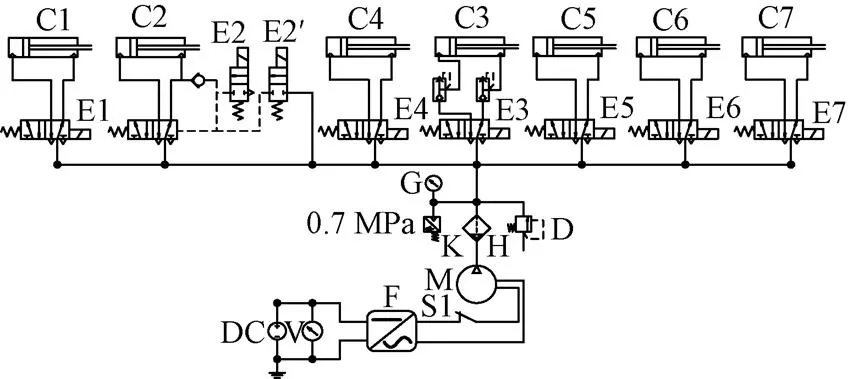
注:C1~C7为气缸;E1~E7为电磁阀;D为减压阀;K为压力继电器;S1为开关,下同。

表3 气缸通断组合与对应的插秧机动作表
由表3可以看出,插秧机的大部分动作(左右转弯、离合、前进、倒退和插秧)都需要C3气缸的配合,所以必须使C3气缸能快速接通与切断,因此,在C3气缸和换向阀之间设有快速排气阀,以保证动作响应及时。气缸C2为插秧机自身的液压升降系统提供辅助,控制插秧机的升降动作,为防止插秧机升至一定高度后在一定时间内由于插秧机自身液压系统压力不稳定等问题而导致高度发生变化,从而影响系统稳定性,在C2气缸与换向阀之间设置自锁式回路,当电磁阀E2通电后,换向阀右位接通,此时断开电磁阀E2,气缸不会换向,且能保证气压相对稳定,只有当接通电磁阀E2′后,气缸才能换向。
4.2 电控部分设计
为利用无线遥控手段实现对插秧机的实时控制,该研究以型号为STC80C52的单片机芯片,设计信号传输和处理系统。系统之间采用无线串口通讯模式,无线发送和接收串口模块为433mHz,型号为E13-TTL;应用C语言对单片机开发板进行二次开发变为信号传输模块,使具有控制指令发送功能;以单片机最小系统作为车载信号处理模块,信号传输模块和信号处理模块如图7、8所示。

1.无线串口模块 2.矩阵键盘 3.单片机

1.电磁阀 2.电源 3.继电器 4.信号接收模块 5.单片机
信号传输模块首先执行UART()函数将串口初始化,使E13-TTL可用,然后利用单片机开发板自带的矩阵键盘,通过周期性扫描函数KEYSCAN()扫描被按下的键,按下的键的组合对应于表3中的插秧机动作,再通过SEND()函数发送按键组合对应的动作指令。信号传输模块的按键一次只发送一个动作指令,但可以在极短的时间间隔内按下不同的按键,快速实现插秧机动作及动作切换所对应的按键组合。
信号处理模块使用字符变量接收存储信号传输模块发送来的指令。气缸编号与电磁阀、继电器、单片机引脚一一对应,根据对字符变量的判断结果。信号处理模块中单片机的对应引脚值为1时,气缸处于断开状态,反之,则为接通状态,以实现表3中气缸的通断组合,进而对应插秧机动作。
4.3 田间试验与结果分析
为验证辅助行走机构和控制系统的可行性,基于3.3节中得到的优化参数,对辅助行走机构进行结构设计和加工试制,并装配至富来威2Z-455型步行插秧机上,同时将气动执行系统和信号处理模块安装在插秧机托架上,并用拉丝将汽缸活塞末端与控制插秧机动作的相关执行机构相连。水田规格为10 m×20 m,经测量泥脚深度为15~25 cm,将插秧机的行走速度设定为0.45和0.90 m/s,田间试验如图9所示。

图9 田间试验
在0.45和0.90 m/s 2种情况下,手持遥控器分别对插秧机进行直行、插秧、转弯及田间原地180°转向等操作,插秧机均能完成相应操作,信号传输及时,气动执行系统响应及时,动作切换顺畅且无干扰现象,插秧机在田间地头原地180°转向过程中,浮板与泥面完全分离,不存在壅泥壅水现象,验证了辅助行走机构和控制系统的可行性。
5 结 论
该研究的最终结果是希望开发1种基于无线遥控、图像处理和自动控制3种方式融合来完成全自动无人驾驶田间作业的小型插秧机,由于时间和精力有限,作者未能完成图像识别部分,只完成了机械部分和无线遥控部分。
1)根据无线遥控步行插秧机运动要求发明了1套具有升降功能的辅助行走机构,并阐述了机构组成及工作原理,建立了相应的运动学模型。
2)针对辅助行走机构的工作特点,结合农艺要求,制定了辅助行走机构的优化目标与设计变量,并将目标数字化。
3)开发了计算机辅助优化设计与分析软件,并运用“参数导引”启发式优化算法优化出一组满足工作要求的机构设计参数。
4)开发了气动执行系统和无线遥控系统,根据优化参数进行辅助行走机构加工试制,并进行田间试验,验证了机构和控制系统的可行性。
[1] 姬长英,周俊. 农业机械导航技术发展分析[J]. 农业机械学报,2014,45(9):44-54.
Ji Changying,Zhou Jun. Current situation of navigation technologies for agricultural machinery[J]. Transactions of the ChineseSociety for Agricultural Machinery, 2014, 45(9): 44-54. (in Chinese with English abstract)
[2] 李建平,林妙玲. 自动导航技术在农业工程中的应用研究进展[J]. 农业工程学报,2006,22(9):232-236.
Li Jianping, Lin Miaoling. Research progress of automatic guidance technologies applied in agricultural engineering[J]. Transactionsof the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2006, 22(9): 232-236. (in Chinese with English abstract)
[3] Nagasaka Y, Umeda N, Kanetai Y, et al. Autonomous guidance for rice transplanting using global positioning and gyroscopes[J]. Computers and Electronics in Agriculture, 2004, 43(3): 223-234.
[4] Weise G N, Nagasaka Y, Taniwaki K. An investigation of the turning behaviour of an autonomous rice transplanter[J]. J Agric Engng Res, 2000, 77(2): 233-237.
[5] Nagasaka Y, Saito H, Tamaki K, et al. An autonomous rice transplanter guided by global positioning system and inertial measurement unit[J]. Journal of Field Robotics, 2009, 26(6/7): 537-548.
[6] Kaizu Y, Imou K. Vision-based navigation of a rice transplanter[C]//GIGR International Conference. Beijing: [S.n.], 2004.
[7] Kaizu Y, Imou K. A dual-spectral camera system for paddy rice seedling row detection[J]. Computers and Electronics in Agriculture, 2008, 63(1): 49-56.
[8] 张智刚,罗锡文,周志艳,等. 久保田插秧机的GPS导航控制系统设计[J]. 农业机械学报,2006,37(7):95-98.
Zhang Zhigang, Luo Xiwen, Zhou Zhiyan, et al. Design of GPS navigation control system for rice transplanter[J]. Transactions of the ChineseSociety for Agricultural Machinery, 2006, 37(7): 95-98. (in Chinese with English abstract)
[9] 胡炼,罗锡文,赵祚喜,等. 插秧机电控操作机构和控制算法设计[J]. 农业工程学报,2009,25(4):118-122.
Hu Lian, Luo Xiwen, Zhao Zuoxi, et al. Design of electronic control device and control algorithm for rice transplanter[J]. Transactionsof the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2009, 25(4): 118-122. (in Chinese with English abstract)
[10] 苗峻齐,罗锡文,张智刚,等. 无人驾驶水稻精量穴直播机的自动控制系统设计[C]//中国农业工程学会2011年学术年会论文集,2011.
[11] 罗锡文,王坤,张智刚,等. 插秧机自动转向控制的PD参数整定[C]//中国农业工程学会学术年会,2005.
[12] 张智刚,罗锡文,李俊岭. 轮式农业机械自动转向控制系统研究[J]. 农业工程学报,2005,21(11):77-80.
Zhang Zhigang, Luo Xiwen, Li Junling. Automatic steering control system of wheeled model farming machinery[J]. Transactionsof the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2005, 21(11): 77-80. (in Chinese with English abstract)
[13] 周俊,姬长英. 基于机器视觉的轮式移动机器人横向最优控制[J]. 机器人,2002,24(3):209-212.
Zhou Jun, Ji Changying. Lateral optimal control for wheeled mobile robot navigated by machine vision[J]. Robot, 2002, 24(3): 209-212. (in Chinese with English abstract)
[14] 周俊,姬长英. 视觉导航轮式移动机器人横向预测模糊控制[J]. 农业机械学报,2002,33(6):76-79.
Zhou Jun, Ji Changying. Lateral predictive fuzzy logic control for wheeled mobile robot navigated by machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2002, 33(6): 76-79. (in Chinese with English abstract)
[15] 周俊,姬长英. 智能车辆横向控制研究[J]. 机器人,2003,25(1):26-30.
Zhou Jun, Ji Changying. Lateral control of intelligent vehicle[J]. Robot, 2003, 25(1): 26-30. (in Chinese with English abstract)
[16] 周俊,姬长英. 基于知识的视觉导航农业机器人行走路径识别[J]. 农业工程学报,2003,19(6):101-105.
Zhou Jun, Ji Changying. Road recognition for agricultural robot guided by machine vision[J]. Transactionsof the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2003, 19(6): 101-105. (in Chinese with English abstract)
[17] 周俊,姬长英. 农业机器人视觉导航中多分别率路径识别[J]. 农业机械学报,2003,34(6):120-123.
Zhou Jun, Ji Changying. Multi-resolution road recognition for vision navigation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2003, 34(6): 120-123. (in Chinese with English abstract)
[18] 周俊,姬长英,刘成良. 农用轮式移动机器人视觉导航系统[J]. 农业工程学报,2004,36(3):90-94.
Zhou Jun, Ji Changying, Liu Chengliang. Visual navigation system of agricultural wheeled-mobile robot[J]. Transactionsof the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2005, 36(3): 90-194. (in Chinese with English abstract)
[19] 伟利国,张权,颜华,等. XDNZ630型水稻插秧机GPS自动导航试验[J]. 农业机械学报,2011,42(7):186-190.
Wei Liguo, Zhang Quan, Yan Hua, et al. GPS automatic navigation system design for XDNZ630 rice transplanter[J]. Transactions of the ChineseSociety for Agricultural Machinery, 2011, 42(7): 186-190. (in Chinese with English abstract)
[20] 张方明. 田间路径识别算法和基于立体视觉的车辆自动导航方法研究[D]. 杭州:浙江大学,2006.
[21] 赵匀,赵雄,代丽,等. “参数导引”启发式优化算法及应用[C]//第10届中国机构与机器科学应用国际会议(2013CCAMMS)论文集,2013-07-01.
[22] 赵匀. 农业机械分析与综合[M]. 北京:机械工业出版社,2009.
[23] 孙桓,陈作模,葛文杰. 机械原理[M]. 北京:高等教育出版社,2011.
[24] 陈建能,黄前泽,王英,等. 钵苗移栽机椭圆齿轮行星系植苗机构运动学建模与分析[J]. 农业工程学报,2012,28(5):6-12.
Chen Jianneng, Huang Qianze, Wang Ying, et al. Kinematics modeling and analysis of transplanting mechanism with planetary elliptic gears for pot seedling transplanter[J]. Transactionsof the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2012, 28(5): 6-12. (in Chinese with English abstract)
[25] 赵雄,陈建能,王英,等. 水稻钵苗“D形”静轨迹移栽机构逆向设计与分析[J]. 农业工程学报,2012,28(8):92-97.
Zhao Xiong, Chen Jianneng, Wang Ying, et al. Reverse design and analysis of rice seedling transplanter with D-shape static trajectory[J]. Transactionsof the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2012, 28(8): 92-97. (in Chinese with English abstract)
[26] 叶秉良,俞高红,陈志威,等. 偏心齿轮-非圆齿轮行星系取苗机构的运动学建模与参数优化[J]. 农业工程学报,2011,27(12):7-12.
Ye Bingliang, Yu Gaohong, Chen Zhiwei, et al. Kinematics modeling and parameters optimization of seedling pick-up mechanism of planetary gear train with eccentric gear and non-circular gear[J]. Transactionsof the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2011, 27(12): 7-12. (in Chinese with English abstract)
[27] 代丽,孙良,赵雄,等. 基于运动学目标函数的插秧机分插机构参数优化[J]. 农业工程学报,2014,30(3):35-42.
Dai Li, Sun Liang, Zhao Xiong, et al. Parameters optimization of separating-planting mechanism in transplanter based on kinematics objective function[J]. Transactionsof the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2014, 30(3): 35-42. (in Chinese with English abstract)
[28] 武传宇,赵匀,陈建能. 水稻插秧机分插机构人机交互可视化优化设计[J]. 农业机械学报,2008,39(1):46-49. Wu Chuanyu, Zhao Yun, Chen jianneng. Optimization design of rice transplanter separating-planting mechanism with visualization human-computer interaction method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(1): 46-49. (in Chinese with English abstract)
[29] 钱孟波,俞高红,蒋晨骁,等. 非圆齿轮水稻钵苗抛秧机构运动机理与参数优化[J]. 农业机械学报,2014,45(6):64-69.
Qian Mengbo, Yu Gaohong, Jiang Chenixao, et al. Work principle and parameter optimization of rice-seedling transplanter with non-circular gears[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 64-69. (in Chinese with English abstract)
[30] 俞高红,谢仁华,赵匀,等. 椭圆齿轮传动后插旋转式分插机构运动分析与实验[J]. 农业机械学报,2008,39(5):45-48.
Yu Gaohong, Xie Renhua, Zhao Yun, et al. Kinematic analysis and experiment of backward rotary transplanting mechanism with elliptical gears transmission[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(5): 45-48. (in Chinese with English abstract)
Design and performance experiment of wireless remote control walking rice transplanter
Chen Xunjiao1, Lü Zhijun1, Xue Xianglei1, Xin Liang1, Yu Qingcang2, Yu Youpeng1, Zhao Yun1※
(1.,,150030,;2.310018,)
Wireless remote control walking rice transplanter has broad market prospects and a high application value. Its 180° turning without manual assistance in the paddy field is a difficult problem. Based on the analysis of the operations of the walking transplanter in the paddy field, a kind of walking assist mechanism that can be lifted and descended was invented. Thanks to the substantial lifting and descending functions, the floating plate can be fully lifted away from the mud surface in the paddy field, and the resistance to turning can be reduced. A kinematics model was established for this mechanism on the basis of the analysis of the structural characteristics and working principles of this mechanism, while the multi-objective and multi-parameter optimized model was proposed for the walking assist mechanism according to its structural characteristics as well as operating requirements of wireless remote control walking rice transplanter in the paddy field. The computer-aided design and analysis software based on Visual Basic 6.0 was developed, and the “parameter-guided” heuristic optimization algorithm invented by the researcher team was embedded in this software for quick optimal solutions in order to get a group of parameters meeting the working requirements of the walking assist mechanism. Based on the optimized parameters, the structural design of the walking assist mechanism was carried out, and the trial physical prototype was manufactured. At the same time, C Language was applied to carry out the re-development of the microcontroller development board, which was used as signal transmission module for sending the control commands (remote control function). The minimum system of the single-chip microcomputer was used as the vehicle-based signal processing module. The end pneumatic actuator system was developed in order to convert the control commands into the actual actions of the rice transplanter and to realize the automatic operation. The signal processing module used the character variables to receive the commands from the storage signal transmission module. The cylinder numbers respectively correspond to the solenoid valves, the relays, and the single-chip microcomputer pins, so that the “on” and “off” of the cylinders with the corresponding number can be controlled according to the judgment results on the character variables. By this way, different cylinders’ “on/off” acting as a group realized the actions of the rice transplanter. Finally, the physical prototype of the walking assist mechanism, signal processing module and end pneumatic actuator system were fitted to the walking transplanter, and the test was carried out in paddy field with the specifications of 10 m×20 m and the mud depth of 15-25 cm, and the walking speed of the transplanter was set as 0.45 m/s and 0.90m/s. The test results showed that, in the wireless remote control state, the machine successfully completed the operation of planting, straight driving, automatic 90° turning and 180° turning in the paddy field. The walking assist mechanism and control system meet the requirements of the field operation of the wireless remote control walking rice transplanter, that proves the feasibility of the mechanism and the control system.
remote control; design; experiments; walking rice transplanter; walking aided mechanism; parameter-guided heuristic optimization algorithm; pneumatic actuator system; serial communication
10.11975/j.issn.1002-6819.2017.17.002
S223.91+2
A
1002-6819(2017)-17-0010-08
2017-03-06
2017-08-10
黑龙江省应用技术研究与开发计划重大项目(GA16B302)。
陈训教,研究方向为机构创新与优化。哈尔滨 东北农业大学工程学院,150030。Email:herr_chen@qq.com
赵 匀,教授,博士生导师,研究方向为机构创新、数值分析与综合。哈尔滨 东北农业大学工程学院,150030。Email:zhaoyun@neau.edu.cn
猜你喜欢
南方农机(2022年23期)2022-12-01
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
农民致富之友(2020年10期)2020-05-11
现代营销·理论(2019年10期)2019-09-10
汽车维护与修理(2019年1期)2019-07-09
模具制造(2019年4期)2019-06-24
数学大王·低年级(2017年9期)2017-09-18
青年文学家(2016年34期)2017-03-31
科技创新导报(2016年9期)2016-05-14
- 农业工程学报的其它文章
- 网链式花生地残膜回收机设计与试验
- 差速水稻钵苗Z字形宽窄行移栽机构设计
- Design and evaluation of PID electronic control system for seed meters for maize precision planting
- 玉米花生间作播种施肥一体机研制与试验
- Design and test of semi-feeding test-bed for peanut pod picking
- Relationship between frequency spectrum characteristics and vibration responses of Ginkgo biloba trees during mechanical harvesting operation