振动力场提高牧草种子丸粒化包衣效果数值模拟与试验
2017-11-01 22:51侯占峰弭龙凯邵志威
农业工程学报 2017年19期
仇 义,陈 智,侯占峰,宋 涛,弭龙凯,邵志威
振动力场提高牧草种子丸粒化包衣效果数值模拟与试验
仇 义1,陈 智1※,侯占峰1,宋 涛2,弭龙凯1,邵志威1
(1. 内蒙古农业大学机电工程学院,呼和浩特 010018;2. 泰山学院机械与建筑工程学院,泰安 271000)
为提高牧草种子丸粒化包衣合格率,对振动力场作用下的小粒不规则牧草种子进行丸粒化包衣研究。运用Solid-Works和离散元仿真软件EDEM建立了包衣锅三维模型及仿真模型,研究了牧草种子丸粒化包衣过程的运动规律。引入振动后的仿真结果表明:在包衣锅转速为40 r/min,包衣锅振动频率为20 Hz,振幅为2 mm,包衣锅倾角为35°的条件下,种群能在不同的时间点、相同的空间区域分布较为离散,种群的运动剧烈加速种粉间的离散程度,促使种粉达到“沸腾”状态,使其进入彼此间隙,增大种粉间碰撞摩擦次数,达到丸粒包衣的理想效果。试验结果表明:随包衣锅振动频率的增加,单籽率及有籽率均略有提高,而当振动频率为20 Hz时,单籽率及有籽率可达到较理想的丸粒化效果;正交试验结果表明:当包衣锅转速为40 r/min,包衣锅振动频率为20 Hz,包衣锅倾角为35°,包衣时间为20 min时,单籽率达到82.08%,包衣合格率达到98.22%,研究结果可为小粒不规则种子包衣提供参考依据。
种子;丸粒化;试验;包衣;振动力场;仿真
0 引 言
近年来,随着牧区人口的快速增长,对草原的利用强度日益加大,使大面积的天然草原不断退化,生产力下降[1-3]。飞机散播和喷播机喷播是恢复草原植被的有效方法,然而不管是飞机散播还是喷播机喷播都要求对种子进行丸粒化包衣,以确保作业后种子的发芽率和成活率[4-5]。因此,研发牧草种子丸粒化包衣设备,对于采取工程措施恢复与重建退化草地植被,进一步改善草原生态环境,实现畜牧业可持续发展具有十分重要的意义。
从1926年美国科学家Thornton和Ganulee首先提出种子包衣问题后,直到20世纪80年代,发达国家种子丸粒化包衣技术基本成熟。而中国的丸粒化包衣技术始于20世纪80年代。近年来,国内科研院所加大对种子丸粒化包衣设备研究的投入。例如,农业部农业机械试验鉴定总站和农业部南京农业机械化研究所共同研制成功的5WH-150型种子丸粒化设备、中国农机院生产的5BW-50型种子丸粒化包衣一体机、上海交通大学研制的BY2150A型种子包衣机等[6-10]。虽然中国的种子丸粒化包衣技术取得了一定的进步,但仍存在许多问题。归纳起来主要有:所研发的丸粒化包衣设备较少,特别是小粒不规则牧草种子丸粒化包衣设备极少;丸化后的粉化率高,单籽率及包衣合格率低,丸粒化包衣品质差等问题[11-15]。
针对牧草种子丸粒化包衣存在的单籽率及包衣合格率低、丸粒化包衣品质差等问题,本文采用数值模拟与试验验证相结合的方法,将振动力场引入到牧草种子丸粒化包衣设备中,利用振动与旋转的复合运动来促进种子与种衣剂均匀且充分的混合,降低多籽率和无籽率,提高单籽率及包衣合格率。
1 试验设备
1.1 整机结构
该试验装置主要包括种子供料系统、供液系统、称量系统、丸粒化包衣系统、电磁激振器、控制系统、显示系统(图1)。设计的牧草种子丸粒化包衣机主要技术参数见表1。
1.2 包衣机的工作原理
试验时,种子和粉料经提升机提升喂入到种子进料口18和粉料进料口1内,通过调节进料口阀门2实现种粉定量供给。通过高压泵8将药液泵送到喷头15进行雾化,此时种子经过分流板16分流成单片幕状,在种子下落过程中与雾化的药液进行接触,使药液在种子表面成膜。成膜后的种子落入包衣锅14内,此时将粉料喷洒到包衣锅14内,包衣锅14在包衣锅电机11的带动下开始转动。同时电动激振器13通过调节变频器的频率来改变激振力的大小,将激振力施加在包衣锅14的主轴上,进而将振动传递给包衣锅14。在整个包衣过程中,电动激振器一直在提供振动,其目的是增强包衣锅内种粉混合程度以及丸粒化包衣后的牧草种子单子抗压强度。在振动的作用下,使粉料更加均匀、牢固粘附在种子表面,同时有效提高种子的丸粒化包衣合格率、单籽率及单籽抗压强度。丸粒化包衣后,包衣锅14在旋转步进电机10带动下进行旋转,将丸粒化后的种子倒入出料口12并由出料口排出,完成整个加工过程。
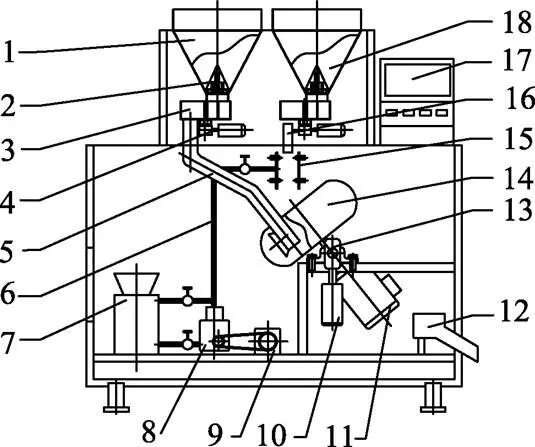
1. 粉料进料口 2. 进料口阀门 3. 称量系统 4. 步进电机 5. 粉料输送管道6. 药液管道7. 药液储存罐8. 高压泵9. 电机 10. 旋转步进电机 11. 包衣锅电机12. 出料口 13. 电动激振器 14. 包衣锅 15. 喷头 16. 分流板 17. 控制器 18. 种子进料口

表1 牧草种子丸粒化包衣机主要技术参数
2 数值模拟模型
2.1 模型参数
选取天然牧草种子为研究对象。根据牧草种子仿真的物理特性参数(表2),在离散元仿真软件EDEM中采用多球体重叠球模型[16-18],重叠球模型可以有效地延缓“自锁”现象的发生,并且对边界的拟合度更好[19-20]。
牧草种子外形是非球体,但统计学上可以用椭球体来近似,根据实际测量牧草种子的外形尺寸后,可将 其外形参数定义为椭球的长半轴=2.5 mm和短半轴=1.2 mm。而对于这样的轴对称椭球体单元在EDEM中进行多球体填充(图2),而参与填充的球体越多近似度越高,计算量也越大[21-22]。为了兼顾计算量,选取13个球体粘合到一起来近似牧草种子。

表2 牧草种子物理特性及仿真参数

图2 牧草种子仿真模型
2.2 牧草种子受力分析
牧草种子在包衣锅中受到重力、摩擦力、激振力、离心力等作用(图3),在合力的作用下随锅旋转,运动至包衣锅高度的2/3位置处,开始下落,落至最底处,如此往复运动。

注:G为重力,N;F1为激振力,N;F2为支持力,N;F3为种子间摩擦力,N;F4为离心力,N;F5为种子与包衣锅摩擦力,N。
2.3 颗粒模型运动方程

利用中心差分法对式(1)进行数值积分得到两次迭代时间步长的中间点表示的更新速度为

对式(2)进行积分,得到位移的等式

由此得到了颗粒新的位移值,如此反复循环实现跟踪每个颗粒在任意时刻的运动[23]。进而得到颗粒任意时刻的速度、加速度、位移及运动轨迹等。
3 颗粒群运动数值模拟
3.1 种粉运动过程仿真
将Solid-Works中建立好的包衣锅三维实体模型导入离散元仿真软件EDEM[24-25]中(图4),在离散元软件EDEM中的Dynamics模块下仿真出包衣锅振动频率、振幅及转速,同时选用Hertz-Mindlin(no slip)built-in接触模型进行数值模拟。数据采集时间间隔为0.02 s,仿真总时长为5 s(仿真过程中的种粉质量比为1∶4),包衣锅以转速为40 r/min的速度下匀速转动;牧草种子及包衣药粉以初速度为0,加速度为重力加速度的条件下进行数值模拟仿真。

1. 种子进料口 2. 药粉进料口 3. 包衣锅
为了探究振动力场的引入对种粉混合程度的影响,分别截取一个仿真周期5 s内的3个时间点1 s、2 s、5 s时的种粉运动状态图。图5为包衣锅转速= 40 r/min、无振动力场的条件下的颗粒运动状态分布图。由图5可以看出,在包衣锅未加振动的条件下,颗粒仅依靠包衣锅转动对牧草种子进行丸粒化包衣,一个供粉料的周期内种粉的混合程度并不理想,多数的牧草种子易形成团聚现象(图5),很难做到种粉充分接触混合,进而造成多籽率、无籽率较高,单籽率及包衣合格率的较低。
注:包衣锅转速n=40 r·min-1,包衣锅倾角为35°,包衣锅频率f=0,包衣锅振幅A=0;红色颗粒代表着色后的包衣药粉,绿色颗粒代表牧草种子。

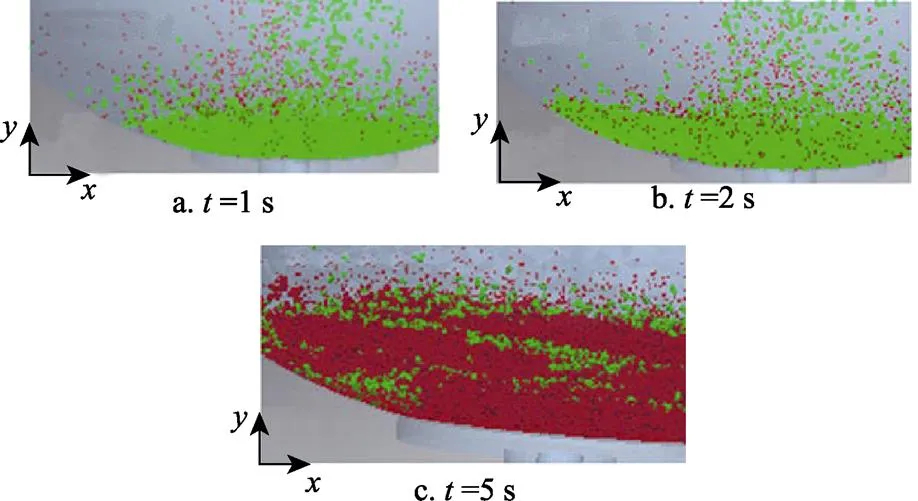
注:包衣锅转速n=40 r·min-1,包衣锅倾角为35°,包衣锅频率f=20 Hz,包衣锅振幅A=2 mm。
图6为将振动力场引入到牧草种子丸粒化包衣机时颗粒运动状态分布图,数据采集的时间间隔为0.02 s,仿真总时长为5 s,包衣锅同样以转速=40 r/min匀速转动,而此时在离散元仿真软件EDEM中的Dynamics模块下仿真出包衣锅振动频率为20 Hz,振幅为2 mm时的颗粒运动状态。同样截取=1 s、=2 s及=5 s的颗粒运动状态进行对比,由对比图可以明显看出在振动力场的作用下,种粉能够达到“沸腾”状态,且种群能在不同的时间点、相同的空间区域分布的较为离散,促使种粉能更好的进入彼此的间隙中,增大种粉的接触机会、碰撞摩擦次数以及碰撞力,有利于牧草种子丸粒化包衣。而当=5 s时,由图5、图6对比可以看出,振动力场的引入(图6)包衣丸化效果更好,包敷在种子表面上的面积更大。因此,将振动力场引入到牧草种子丸粒化包衣机是可行的。
图7为仿真周期(5 s)内颗粒群的速度分布及轨迹流线矢量表示图,红色代表速度最快,蓝色代表速度最慢[26]。当包衣机达到稳定工作状态时(图7),此时包衣锅内种粉的速度从顶部到底部逐渐增加,在包衣锅最底部种粉的速度反而有所降低。牧草种子掉入包衣锅的过程中,受重力加速度作用,速度在到达包衣锅底部时达到最大,与包衣锅碰撞后速度减小,速度降低后有利于种粉的局部混合接触,增大种粉间的局部碰撞接触机会,有利于牧草种子丸粒化包衣。

注:当包衣锅转速为40 r·min-1,包衣锅振动频率为20 Hz,包衣锅倾角为35°,仿真时间为5 s时的包衣机运动仿真图。图中红色代表包衣药粉,绿色代表牧草种子。
3.2 振动力场作用下仿真结果分析
基于以上分析仿真可知:图5、图6能观察出振动力场引入后,种群的局部混合特性。而图7可观察出整个粒子群的宏观运动规律,同时在振动力场作用下的牧草种子、粉料与无振动力场作用的牧草种子、粉料的运动轨迹和速度均有很大的差别。振动力场作用下的牧草种子在包衣锅中受到重力、支持力、摩擦力及振动的综合作用,随包衣锅匀速转动,并沿其内壁上升,且当牧草种子在包衣锅内运动到最大高度时,种子开始做抛射运动[27-28],该牧草种子在与其他种子的相互碰撞、与包衣锅内壁的摩擦、以及种粉间的摩擦力作用下,速度降低。整个运动过程能促使牧草种子在包衣药粉中充分接触摩擦,达到牧草种子丸粒化效果,提高牧草种子的丸粒化程度。而当时间为0.61及0.81 s时(图8),种粉的碰撞力达到最大,说明此时种粉粘结到一起的可能性最大,粘结效果最好,此时为牧草种子一个周期内的包衣较 佳阶段。
图9为全部种粉平均速度与平均位移随时间变化关系曲线,由曲线的走势可知,0.36 s时为平均速度与平均位移随时间变化曲线的极值点,以0.36 s为界,前后两段的速度位移有着明显的差异。说明0.36 s前为种粉下落阶段,种及粉自上到下,在重力的作用下,种粉速度变化趋势在逐渐增大,而种粉的位移处于先增大后减小的趋势。由种粉速度位移随时间变化曲线图9可知,0.36 s后种粉速度在逐渐降低而位移在逐渐变大,说明此阶段为种粉包衣阶段,此时的种粉在离心力与振动力场的双重作用下进行丸粒化包衣;当0.81 s后的种粉位移增幅趋势变化不大而速度曲线在逐渐变小,此时的种粉在受到粒子间的碰撞与摩擦力的作用下,开始降速包衣,此时的种粉数量增多,碰撞摩擦次数变大,可推断此时段为丸粒化包衣较佳阶段。

图8 种粉质心所受合力图

图9 全部种粉平均速度和平均位移与时间的关系曲线
4 试验验证
4.1 振动力场作用下的对照试验
为了进一步验证仿真的准确性,即研究引入振动后对牧草种子丸粒化包衣机的有籽率及单籽率的影响。选用同一批次丸化后的牧草种子,随机抽出200粒,人工碾碎丸化后的种子,统计有籽的颗粒数,用有籽的颗粒数重复取样10次,取其平均值,将有籽的颗粒数除以颗粒总数,即为有籽率。同样选用同一批次丸化后的牧草种子,随机抽出200粒,人工碾碎丸化后的种子,统计单籽的颗粒数,重复取样10次,取其平均值,将单籽的颗粒数除以颗粒总数,即为单籽率。保持包衣锅转速为40 r/min、包衣锅倾角为35°、包衣时间为20 min不变的条件下,以有籽率及单籽率为性能检测指标,分别在包衣锅振动频率为0、15、20、25 Hz的条件下,进行单因素试验,每组性能试验进行3次,试验结果取平均值见表3。

表3 不同振动频率下丸化包衣试验表
注:数据为“均值±标准差”;包衣锅转速为40 r·min-1、包衣锅倾角为35°、包衣时间为20 min。
Note: The data are expressed in the form of mean and standard deviations. Coating pan speed is 40 r·min-1, the dip angle of the coating pot is 35°, the coating time is 20 min.
由所设计试验装置(图1)工作过程可知,在牧草种子落入包衣锅前,种子就开始与雾化的药液进行接触,使药液在种子表面成膜,增加牧草种子的质量。与此同时牧草种子在落入包衣锅后开始随包衣锅转动,在包衣锅转速为40 r/min,振动频率为20 Hz的条件下,牧草种子在包衣锅内被旋转起的最大高度仅有包衣锅的高度的2/3。因此,在整个包衣的过程中振动对牧草种子运动的影响远远大于空气对其影响,即空气的影响可以忽略不计。
由表3可知,包衣锅振动频率为20 Hz时为牧草种子丸粒化包衣的较理想状态,此时有籽率及单籽率的均值分别为93.8%和81.5%。而当包衣锅振动频率为25 Hz时,此时的包衣锅振动频率过快容易将已包好的种子外表面的粉料振动下来,因此会造成有籽率及单籽率的下降。综上可知,随着振动力场的引入牧草种子有籽率及单籽率均有明显的提高,能够达到丸粒化包衣的目的,进一步验证了仿真结果的真实性与可行性。
4.2 正交试验
为了确定牧草种子丸粒化包衣机最优工作参数组合,以单籽率和包衣合格率为性能检测指标,以包衣锅转速、包衣时间、振动频率、包衣锅倾角为试验因素,每个因素分别取3个水平进行正交试验[29]。每组性能试验进行3次,试验结果取平均值见表4,试验中的牧草种子的数量大于50 000粒/次。根据前期预试验得到的影响包衣合格率的各参数范围。按照要求进行丸粒化包衣,完成一次包衣过程后,从每份试验样品中分别取出200粒包衣后的牧草种子,采用5倍放大镜观察每粒试样,根据中华人民共和国机械工业局推荐标准JB/T 7730—2011,以包衣剂包敷在牧草种子上的面积大于80%的牧草认定为包衣合格,按照下式计算包衣合格率

式中为包衣合格率(%),Z为种衣剂包敷牧草种子面积大于80%的牧草种子粒数,Z为包衣不合格牧草种子粒数。
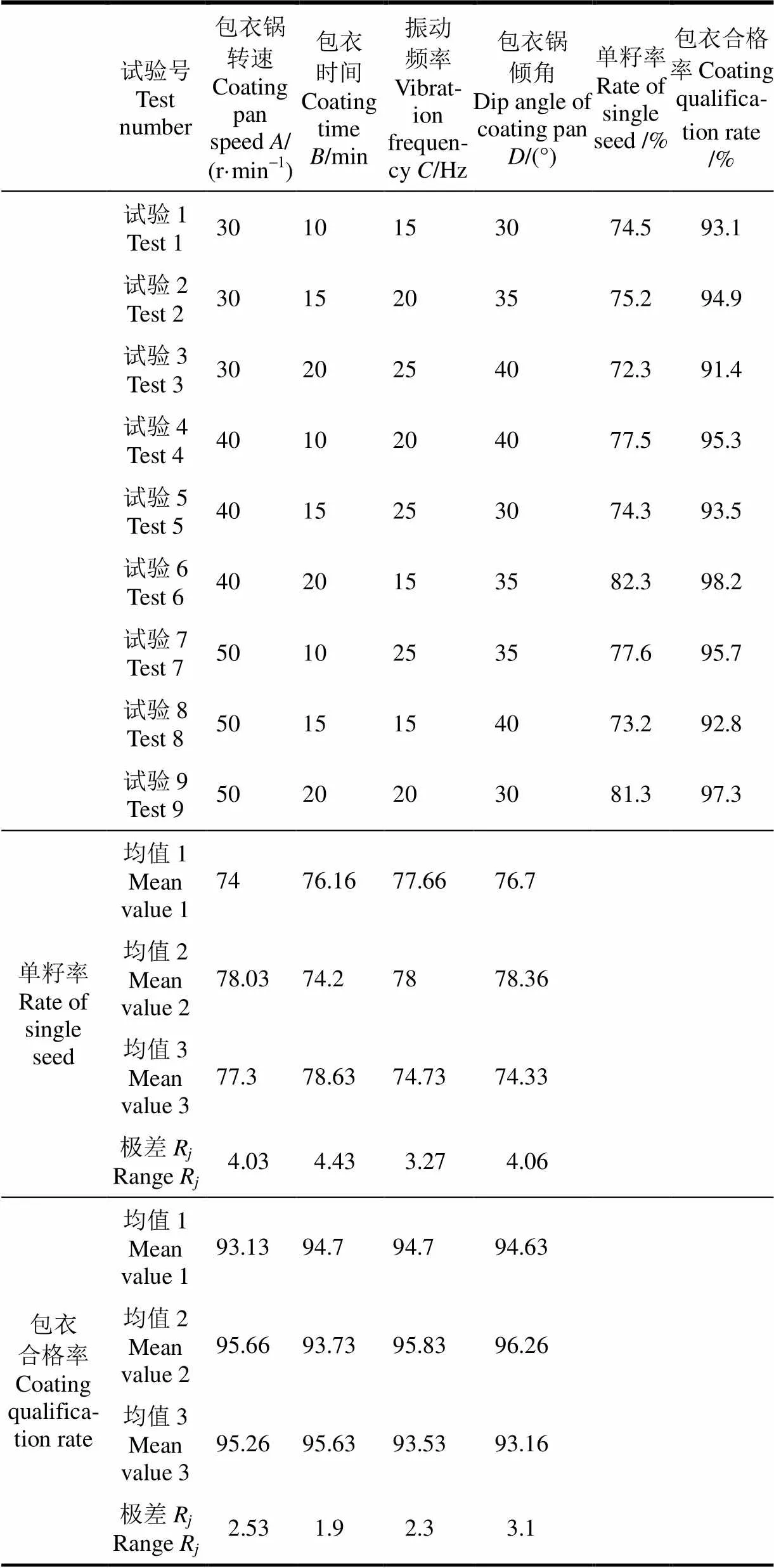
表4 正交试验方案及试验结果
4.3 极差分析及最优组合参数确定
极差的计算结果见表4。由表可知各列的极差值不相等,说明各列水平改变对试验结果的影响是不相同的。极差越大,说明因素水平的改变对试验结果影响越大,极差水平最大的那一列因素就是最主要因素[30]。因此,根据极差大小排出4个因素分布对3个指标影响的重要性的主次顺序,如下:
单 籽 率:>>>
包衣合格率:>>>
在本例中试验指标均越大越好,所以应该挑选每个因素最大的水平。因此可得如下结论:
对单籽率,最优方案为:2322
对包衣合格率,最优方案为:2322
由极差分析可知:影响单籽率及包衣合格率的最优组合相同均为2322,对该组合做试验验证分析,每组试验重复5次,试验结果取平均值。
当包衣锅转速40 r/min,包衣时间为20 min,包衣锅振动频率20 Hz,包衣锅倾角为35°时,单籽率为82.08%,包衣合格率为98.22%。因此,振动频率为20 Hz时牧草种子丸粒化包衣效果较好。
5 结 论
1)将振动力场引入到牧草种子包衣机的丸化过程中,利用振动加旋转复合运动来促使牧草种子快速丸化成型,增大种粉的接触机会及碰撞摩擦次数,提高牧草种子的包衣质量。同时通过仿真与试验验证可知,引入振动力场来提高牧草种子包衣合格率及单籽率是真实有效的。
2)运用离散元仿真软件EDEM建立牧草种子包衣机仿真模型,确定了牧草种子包衣规律,由牧草种子位移、速度随时间变化曲线可知,0.36 s前为种粉下落阶段,0.36 s后为种子包衣阶段。而当0.81 s时,种粉的碰撞力达到最大且种子在药粉中运动位移最大,粘结时间最长,粘结效果最好,说明此时为包衣的最佳阶段。
3)对影响单籽率及包衣合格率的因素进行正交优化试验;当包衣锅转速40 r/min,包衣时间20 min,包衣锅振动频率20 Hz,包衣锅倾角为35°时,单籽率为82.08%,包衣合格率为98.22%。
[1] 王多伽,高阳,徐安凯. 不同改良措施对退化羊草草地的影响[J]. 草业与畜牧,2015(6):22-24. Wang Duoga, Gao Yang, Xu Ankai. The effect of different improving measures ongrassland[J]. Prataculture & Animal Husbandry, 2015(6): 22-24. (in Chinese with English abstract)
[2] 桂花,乌仁其其格. 呼伦贝尔草原不同程度退化下羊草群落特征[J]. 南方农业学报,2012,43(12):2035-2039. Gui Hua, Wuren Qiqige. Characteristics of Leymus chinensis community under different extend of degradation in Hulun Buir Grassland[J]. Journal of Southern Agriculture, 2012, 43(12): 2035-2039. (in Chinese with English abstract)
[3] 张文军,张英俊,孙娟娟. 退化羊草草原改良研究进展[J]. 草地学报,2012,20(4):603-608. Zhang Wenjun, Zhang Yingjun, Sun Juanjuan. Leymus Chinensis grassland improvements (Review)[J]. Acta Agrestia Sinica, 2012, 20(4): 603-608. (in Chinese with English abstract)
[4] 王皓田. 内蒙古草原生态环境退化的调查与思考[J]. 北方经济,2011(11):44-46.
[5] 张新时,唐海萍,董孝斌. 中国草原的困境及其转型[J].科学通报,2016(2):165-177. Zhang Xinshi, Tang Haiping, Dong Xiaobin. The dilemma and its transformation of grassland in China[J]. Chinese Science Bulletin, 2016(2): 165-177. (in Chinese with English abstract)
[6] 赵正楠,张西西,王涛. 种子丸粒化技术研究进展[J]. 中国种业,2013(5):18-19.
[7] 程广宇,陈云,付斌军. 新疆种子丸粒化技术发展探析[J].种子技术,2015(7):55-56. Cheng Guangyu, Chen Yun, Fu Binjun. Development of granulation technology of seed pills in Xinjiang[J]. Seed technology, 2015(7): 55-56. (in Chinese with English abstract)
[8] 孙正,李树君,苑严伟. 番茄种子包衣丸粒化装置的设计与试验[J]. 农机化研究,2017,39(6):162-169. Sun Zheng, Li Shujun, Yuan Yanwei. Design and experiment of seed pelleting apparatus for tomato seed[J]. Journal of Agricultural Mechanization Research, 2017, 39(6): 162-169. (in Chinese with English abstract)
[9] 华伟,杨红光,张福瑞. 一种新型种子包衣装置的设计[J]. 农业工程,2016,6(1):79-82. Hua Wei, Yang Hongguang, Zhang Furui. Design of a new kind of seed coating equipment[J]. Agricultural Engineering, 2016, 6(1): 79-82. (in Chinese with English abstract)
[10] 王丽维,赵武云. 种子包衣机械的研究现状与进展[J]. 湖南农业科学,2009(3):94-96. Wang Liwei, Zhao Wuyun. Research status and progress in seed-coating machine[J]. Hunan Agricultural Sciences, 2009 (3): 94-96. (in Chinese with English abstract)
[11] 杨婉霞,赵武云,杨梅. 基于专家系统的智能化种子包衣机控制系统研制[J]. 中国农机化学报,2014,35(1): 216-219. Yang Wanxia, Zhao Wuyun, Yang Mei. Development of an intelligent seed coating machine control system based on expert system[J]. China Agricultural Mechanization, 2014, 35(1): 216-219. (in Chinese with English abstract)
[12] Zhu Ming, Chen Hajun, Li Yonglei. Retrospect and prospect of seed processing industry in China[J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(2): 1-6. (in English with Chinese abstract)
[13] 桑杰,赵春宇,朱成刚. BY-150型种子包衣机检测控制系统设计[J]. 农机化研究,2015,37(3):83-86. Sang Jie, Zhao Chunyu, Zhu Chenggang. Detection control system design of BY-150 seed coating machine[J]. Journal of Agricultural Mechanization Research, 2015, 37(3): 83-86. (in Chinese with English abstract)
[14] 何祖欣,毛培胜,孙彦. 草类种子包衣技术现状综述[J].草地学报,2016,24(2):270-277. He Zuxin, Mao Peisheng, Sun Yan. Review of the current situation of seed coating technology[J]. Journal of grassland, 2016, 24(2): 270-277. (in Chinese with English abstract)
[15] 李少杰. 种子包衣机械研究现状与进展[J]. 农机使用与维修,2013(10):99-100.
[16] 石林榕,吴建民,孙伟. 基于离散单元法的水平圆盘式精量排种器排种仿真试验[J]. 农业工程学报,2014,30(8):40-48. Shi Linrong, Wu Jianmin, Sun Wei. Simulation test for metering process of horizontal disc precision metering device based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(8): 40-48. (in Chinese with English abstract)
[17] 刘彩玲. 基于三维激光扫描的水稻种子离散元建模及试验[J]. 农业工程学报,2016,32(15):294-300. Liu Cailing. Experiment and discrete element method model of rice seed based on 3D laser scanning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(15): 294-300. (in Chinese with English abstract)
[18] 刘凡一,张舰,李博. 基于堆积试验的小麦离散元参数分析及标定[J]. 农业工程学报,2016,32(12):247-253. Liu Fanyi, Zhang Liang, Li Bo. Simulation test for metering process of horizontal disc precision metering device based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(12): 247-253. (in Chinese with English abstract)
[19] 邱白晶,姜国微,杨宁. 水稻籽粒流对承载板冲击过程离散元分析[J]. 农业工程学报,2012,28(3):44-49. Qiu Baijing, Jiang Guowei, Yang Ning. Discrete element method analysis of impact action between rice particles and impact-board[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(3): 44-49. (in Chinese with English abstract)
[20] 李水乡,赵健. 非球体填充的组合球模型及松弛算法[J].计算物理,2009(3):454-460. Li Shuixiang, Zhao Jian. Sphere assembly model and relaxation algorithm for packing of non-spherical particles[J]. Computational Physics, 2009(3): 454-460. (in Chinese with English abstract)
[21] Dziugys Algis, Peters Bernhard. An approach to simulate the motion of spherical and non-spherical fuel particles in combustion chambers[J]. Granular Matter, 2001, 3(4): 231-266.
[22] 赵述敏,胡志刚. 椭球颗粒随机紧密堆积实验研究[J]. 西安交通大学学报,2016(9):140-145. Zhao Shumin, Hu Zhigang. Sphere assembly model and relaxation algorithm for packing of non-spherical particles[J]. Journal of Xi’an Jiao Tong University, 2016(9): 140-145. (in Chinese with English abstract)
[23] 闫银发,孟德兴,宋占华. 槽轮式补饲机颗粒动力学数值模拟与试验[J]. 农业机械学报,2016,47(增刊1):249-253. Yan Yinfa, Meng Dexing, Song Zhanhua. Particle kinetic simulation and experiment for flute-wheel feeding machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(S1): 249-253. (in Chinese with English abstract)
[24] 王金武,唐汉,王奇. 基于EDEM软件的指夹式精量排种器排种性能数值模拟与试验[J]. 农业工程学报,2015,31(21):43-50. Wang Jingwu, Tang Han, Wang Qi. Numerical simulation and experiment on seeding performance of pickup finger precision seed-metering device based on EDEM[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(21): 43-50. (in Chinese with English abstract)
[25] 廖庆喜. 基于EDEM的离心式排种器排种性能数值模拟[J]. 农业机械学报,2014,45(2):109-114. Liao Qingxi. Numerical simulation on seeding performance of centrifugal rape-seed metering device based on EDEM[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(2): 109-114. (in Chinese with English abstract)
[26] 胡国明,颗粒系统的离散元素法分析仿真[M]. 武汉:武汉理工大学出版社,2010:295-298.
[27] 马荣朝. 轻小型种子包衣机的研制及最佳滚筒转速的研究[J]. 中国农机化,2003(4):25-27. Ma Rongchao. Study on the development of the light and small seed coating machine and the optimal rotational speed of roller[J]. China Agricultural Mechanization, 2003(4): 25-27. (in Chinese with English abstract)
[28] 刘晓辉. 小粒径作物气力滚筒式精量集排器设计与试验研究[D]. 武汉:华中农业大学,2013.Liu Xiaohui. Design and Experimental Study of Pneumatic Drum-type Precision Collect and Exhaust Implement for Small Grain Crops[D]. Wuhan: Huazhong Agricultural University, 2013. (in Chinese with English abstract)
[29] 迟全勃. 试验设计与统计分析[M]. 重庆:重庆大学出版社,2015:280-282.
[30] 孙正. 番茄种子包衣丸化关键技术研究与装备开发[D]. 北京:中国农业机械化科学研究院,2016. Sun Zheng. Study on the Key Technology and Equipment Development of Tomato Seed Pelleting[D]. Beijing: Chinese Academy of Agricultural Mechanization Sciences, 2016. (in Chinese with English abstract)
仇 义,陈 智,侯占峰,宋 涛,弭龙凯,邵志威. 振动力场提高牧草种子丸粒化包衣效果数值模拟与试验[J]. 农业工程学报,2017,33(19):86-93. doi:10.11975/j.issn.1002-6819.2017.19.011 http://www.tcsae.org
Qiu Yi, Chen Zhi, Hou Zhanfeng, Song Tao, Mi Longkai, Shao Zhiwei.Numerical simulation and experiment on improving pelleted coating of forage grass seeds by vibration force field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(19): 86-93. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.19.011 http://www.tcsae.org
Numerical simulation and experiment on improving pelleted coating of forage grass seeds by vibration force field
Qiu Yi1, Chen Zhi1※, Hou Zhanfeng1, Song Tao2, Mi Longkai1, Shao Zhiwei1
(1.010018,2.271000,)
In order to improve the rate of coating and pelleting of forage grass seeds, our team is researching the pellet coating of small-particle irregular forage grass seeds under the action of vibration force field. Besides, we establish the three-dimensional model and simulation model of coating pan by using Solid-Works and EDEM (enhanced discrete element method). At the same time, the movement law of seed pelleting coating process is studied for forage grass seed. Simulation results show that when the coating pan speed is 40 r/min, the vibrating frequency of coating pan is 20 Hz, and the amplitude is 0.02 mm, the particle swarm can be dispersed at different time points and in the same spatial region. In addition, the movement of particle swarm accelerates the dispersion degree of the particles. The forage grass seed and powder can reach a boiling state immediately. Meanwhile, by observing the simulation graph, we can see that the forage grass seed and powder can enter each other’s gap easily to increase the collision times between seeds and powder, and achieve the ideal effect of pellet coating eventually. According to relation curve of average velocity and average displacement of all forage seeds and powder with time, we can notice that the seed and powder fall into the coating pan before 0.36 s, while the seed and powder is pelleted and coated after 0.36 s. The reason is that this time point is the extreme point of the curve. After this point, the displacement of seed and powder is gradually becoming larger, while the velocity is gradually becoming lower. We can easily draw a conclusion that forage grass seeds will come into contact with the powder more frequently during the long distance of the movement; the longer the bonding time, the better effect the bonding. However, when the coating time is 0.81 s, the trend of the increase amplitude of the powder displacement has little change, but the velocity is becoming smaller. At this time, the speed of powder and forage grass seed begins to slow down and be coated under the influence of particle collision and friction. This is the best time for the pellet coating of forage grass seed and powder. Otherwise, through the force analysis diagram of the powder and forage grass seed, we can notice that the collision force reaches the maximum at 0.61 and 0.81 s. It shows that the bonding effect of the powder and forage grass seed is the best, and it is easy to seed pelleting. The conclusions are consistent with the velocity and displacement curves. Furthermore, the results of experiment show that when the coating pan speed is 40 r/min, the vibrating frequency of the coating pot is 20 Hz, the dip angle of the coating pot is 35°, the coating time is 20 min, the single seed rate of pelleting coating can be reached 82.08%, the coating qualified rate can be reached 98.22%. The results can provide references for the coating of small irregular seeds.
seeds; granulation; experiments; coating; vibration force field; simulation
10.11975/j.issn.1002-6819.2017.19.011
S223.1
A
1002-6819(2017)-19-0086-08
2017-05-25
2017-08-06
国家自然科学基金资助项目(41661058);国家自然科学基金资助项目(41361058)
仇 义,内蒙古呼伦贝尔人,博士生,主要从事环境测控技术与装备智能化研究。Email:qyi0508@163.com
※通信作者:陈 智,内蒙古察右前旗人,教授,博士生导师,主要从事环境测控技术与装备智能化研究。Email:sgchenzhi@imau.edu.cn
猜你喜欢
农机科技推广(2022年7期)2022-08-16
中国音乐学(2022年1期)2022-05-05
湖北农机化(2021年15期)2021-12-07
中国现代中药(2021年7期)2021-09-06
今日农业(2021年10期)2021-07-28
河南农业·综合版(2020年11期)2020-11-17
河南农业科学(2020年7期)2020-07-22
广西农学报(2019年4期)2019-11-26
农民致富之友(2018年9期)2018-06-27
教学与管理(理论版)(2017年7期)2017-08-11