40万t船舶乘潮进董家口港水深适应性
2017-10-30 08:13唐存宝刘敬贤刘传润李欢欢
中国航海 2017年2期
唐存宝,张 亮,刘敬贤,刘传润,李欢欢
(1.广州航海学院 海运学院,广州 510725; 2.武汉理工大学 航运学院,武汉 430063)
40万t船舶乘潮进董家口港水深适应性
唐存宝1,2,张 亮2,刘敬贤2,刘传润1,李欢欢2
(1.广州航海学院 海运学院,广州 510725; 2.武汉理工大学 航运学院,武汉 430063)
以董家口港为目标水域,计算40万t船舶抵港最大吃水,考虑航道较长、分段较多等特点,充分运用乘潮条件和潮汐规律,提出针对超大型船舶的富余水深应用方法。运用该方法分析航道水深、乘潮条件、船舶吃水和富余水深之间的关系,判定航道水深的适应性,提炼航速控制的边界值。应用结果表明:富余水深按照《海港总体设计规范》取值,航速控制在设定的范围内,董家口港航道水深适应40万t船舶满载乘潮进港。
40万t船舶;富余水深;应用方法;乘潮;航速控制
当前我国青岛、大连等多个港口已引入或正在引入巴西“淡水河谷”型40万t散货船,并已建成或正在建设配套的泊位和航道。然而,保障40万t超大型船舶在受限水域安全航行的关键技术还未得到有效解决,因此水深适应性问题一直制约着40万t船舶安全进出港。
近年来,针对超大型船舶受限水域航行条件的研究较多,主要包括富余水深(Under Keel Clearance,UKC)[1-4]、安全航速[5-6]及限定条件[7]等。文献[1]通过分析大型矿砂船(Very Large Ore Carrier,VLOC)在浅水域航行时影响富余水深的因素,指出静态富余水深和动态富余水深的计算方法;文献[2]分别根据《海港总平面设计规范》和经验公式计算富余水深,并分析2种方法的特点。文献[5]根据富余水深、航道尺度和交通流提出船舶安全航速三维限定数学模型。文献[7]研究渤海海域超大型油船(Very Large Crude Carrier,VLCC)航行安全保障关键技术,提出富余水深、航速控制及优化航路等方面的建议。文献[8]~文献[10]在富余水深预测和动态富余水深及其应用方面有较好的研究成果。目前,专门针对40万t船舶航行保障条件的研究较少,安全航行的关键技术指标尚未达成共识。
为满足40万t船舶进港常态化的需要,交通运输部于2015年发布《40万吨散货船设计船型尺度及相关设计规定》作为现行《海港总体设计规范》[11](以下简称《规范》)的补充,对40万t船舶富余水深的取值给出标准,但该标准没有应用实例。40万t船舶在航道内航行受潮位和潮位历时的双重限制,从而影响航速和富余水深的取值;同时,在有多段航道时,富余水深不应取固定值,可采用类似于“动态富余水深”的方法分析乘潮条件和潮汐规律作用下的水深适应性。
这里以青岛董家口港航道为目标,运用乘潮条件和潮汐规律研究40万t船舶满载吃水条件下基于《规范》的多航段富余水深应用方法,运用该方法分析航道水深的适应性,提炼航速控制的边界值。
1 40万t船舶抵港最大吃水
这里所指的40万t船舶为巴西“淡水河谷”型散货船,满载吃水为23.0 m,从马德拉港出发航行至董家口附近水域,抵港满载吃水(抵港最大吃水)d0=22.8 m。计算过程为
1) 耗油量=航行距离(12 523 n mile)×日油耗(75 t)/(航速(12 kn)×24 h)=3 261 t;货物水分排量约1 500 t(航行中从货舱污水井内排出的货物水分);到港时的排水量减少值=耗油量+货物水分排量=4 761 t。
2) 满载时每厘米吃水吨数=214.4 t/cm,即到港吃水会减少约22.2 cm。
3) 船舶离港时的满载海上吃水=23.02 m。
4) 到港预计吃水=船舶离港时的满载海上吃水-到港吃水减少量=22.8 m。
2 董家口港航行环境
2.1航道
40万t船舶进港航道PC由PA,AB和BC等3段组成(见图1),PA段、AB段、BC段及BC段后接制动段CD的长度分别为10.8 n mile,4.7 n mile,3.1 n mile和1.08 n mile,航道设计底高Z=-23.2 m(以理论最低潮面为基准面,下同)。
2.2潮汐与靠泊时机
董家口港的潮汐类型为正规的半日潮,每天约12 h有1次高潮和1次低潮。40万t船舶需乘较大的潮位航行,根据正规半日潮的特征和董家口港潮汐的统计数据,借鉴已通航的30万吨级船舶的乘潮经验,可利用的乘潮时间应限制在高潮前后各3 h,乘高潮频率统计表(见表1)给出最高6 h的乘潮历时。由于受风流的影响较大,因此要求40万t船舶在转流前的高平潮靠泊,靠泊完成的最后时间(转流时间)可推迟到高潮后1 h(见图2),即在6 h的乘高潮历中,只能利用4 h来完成航道内航行、转向、制动和靠泊过程(顺靠码头不计旋回时间),其中制动和靠泊段乘潮历时见表2。
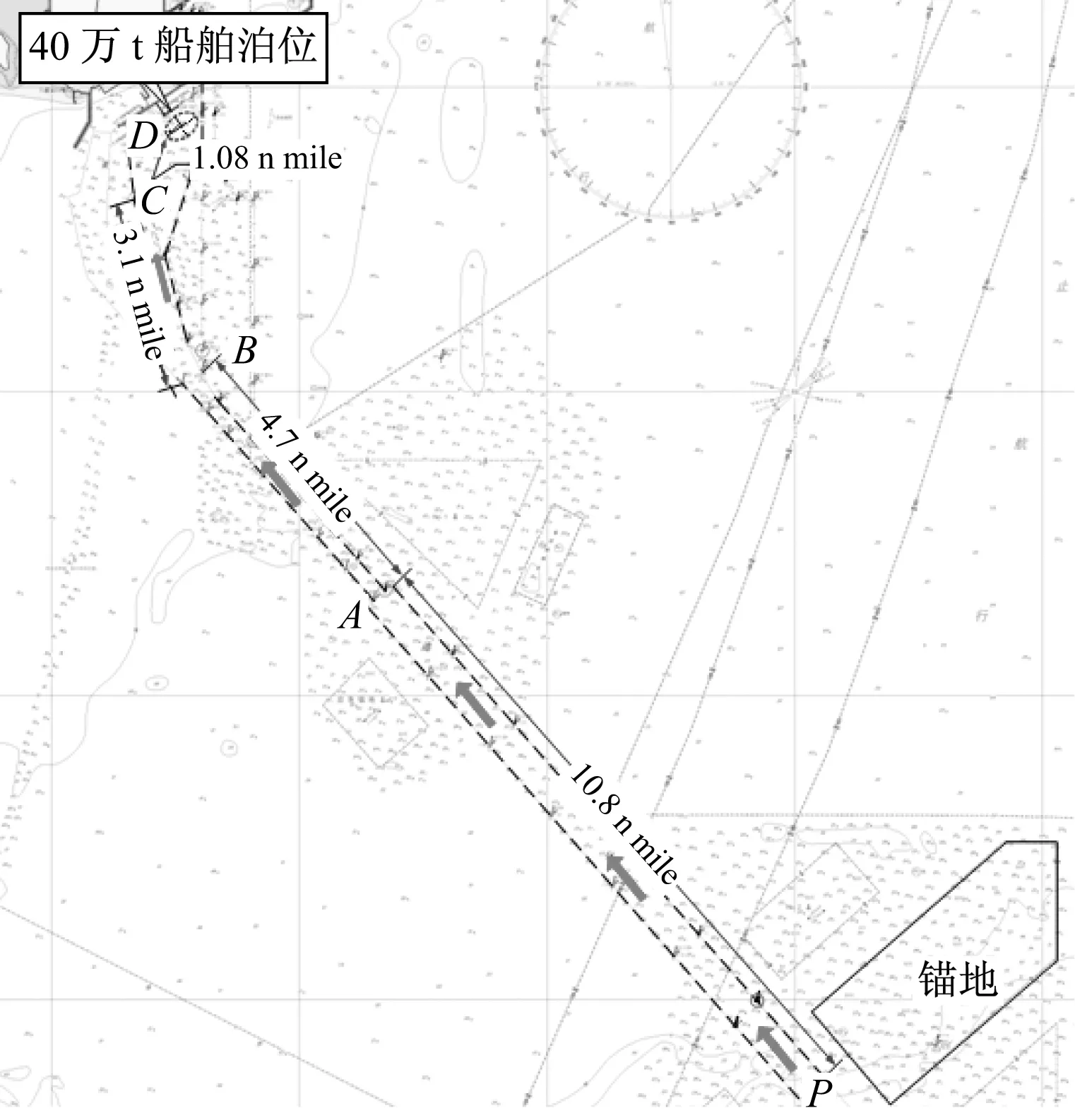
图1 40万t船舶进港航道
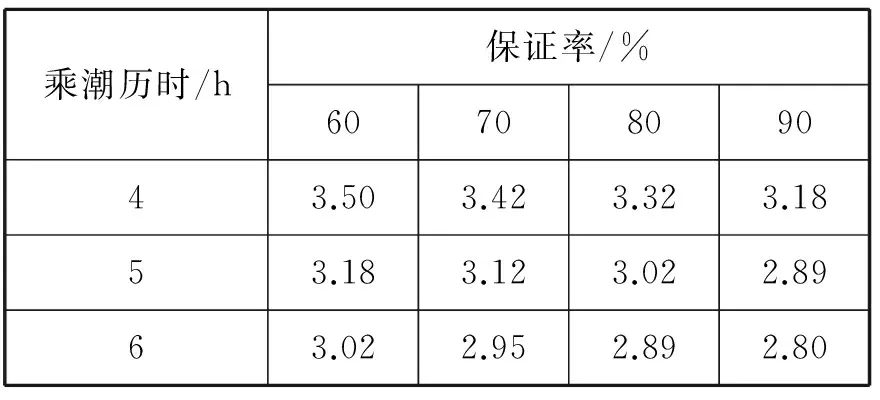
表1 董家口港乘高潮频率统计表 m

图2 乘潮进港历时4 h经过各点时刻示意

表2 制动和靠泊段乘潮历时
3 多航段航行富余水深的取值与应用
3.1富余水深取值
参照《规范》,富余水深dUKC,所需通航水深D0,航道设计水深D,实际通航水深D1及乘潮历时ts的计算式分别为
式(1)~式(5)中:Z0为航行下沉量,与航速有关;Z1为龙骨下最小富余深度,与海底底质有关;Z2为波浪富余深度;Z3为装载纵倾富余深度;Z4为备淤水深;d为吃水;H为乘潮潮位;dep为海图水深(航道设计底标高Z的相反数);Kt为时间富余系数,取1.1~1.3;t1为航道航行时间;t2为船舶在港内转头的时间;t3为船舶靠离码头的时间。
根据航速、船舶吃水、波浪条件和航道底质特征,通过式(1)~式(3)可求得所需通航水深,通过式(4)可求得现有乘潮条件下的实际通航水深。此外,式(1)反映出dUKC随航速的变化而变化,这是确定航速控制的主要依据之一。根据《规范》,下沉量与航速的关系见图3,由此求得40万t船舶(d0=22.8 m)在董家口港航行时所需的dUKC和D0见表3。
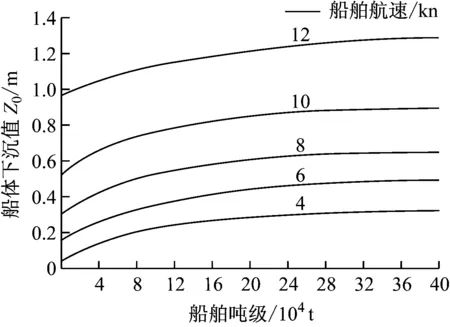
图3 下沉量与航速的关系
3.2富余水深应用方法
已知乘高潮频率统计表和满载吃水d0,探求40万t船舶在吃水为d0时安全航行的水深适应性及航速控制的边界值。
3.2.1求解原理
由于航速、乘潮及所需富余水深相互制约,无法同时确定三者的取值,因此假设船舶在每段航道内的航速为某个经验值范围[12],取其中的某个值,求得富余水深、满载航行所需通航水深及乘潮历时。
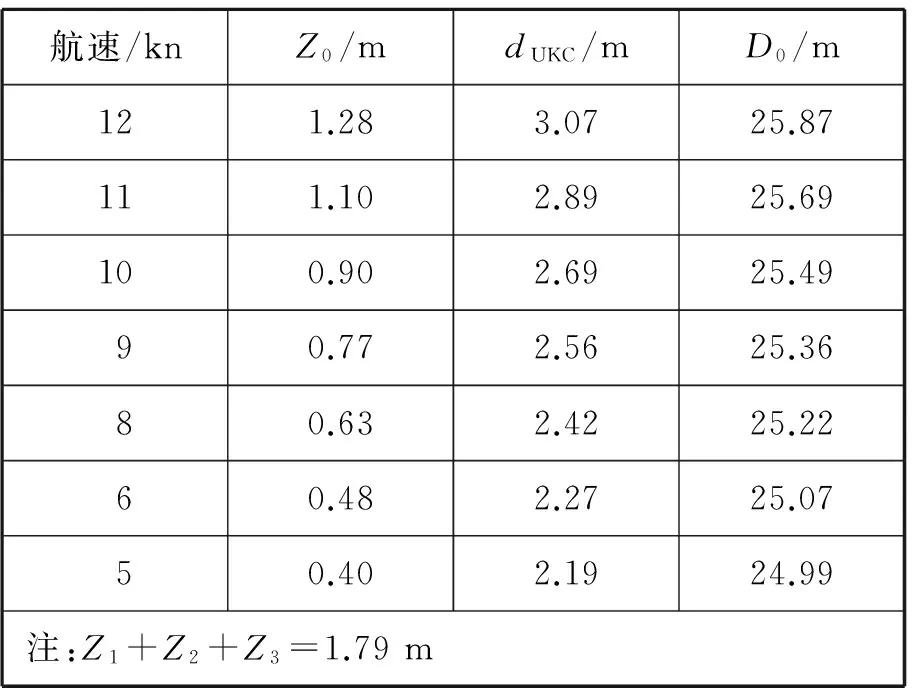
表3 dUKC和D0取值
根据乘潮历时选择乘潮保证率(尽量选择≥90%的保证率)的潮位,计算实际通航水深。当所需通航水深小于实际通航水深时,说明该水深适应安全进港,所选择的经验航速符合要求。该原理考虑乘潮潮位和乘潮历时双重限制因素,即
(6)
式(6)中:T为航道内航行至靠泊完成允许的最大时长。
3.2.2求解过程
(1) 根据各段航道的长度及距泊位的距离确定每段的经验航速范围v,选取其中一个速度对v1,例如PC段速度对可记为v=(vPA,vAB,vBC)。
(2) 根据v1确定dUKC和D0(如表3所示)。
(3) 根据t=S/v计算航道乘潮时间和,S为航道长度。
(4) 根据式(5)计算从航道开始至靠泊完成所用时间ts。
(5) 根据靠泊时机,从乘高潮频率统计表中选择历时t′。若在高平潮时靠泊,则t′=2[ts];若在满足潮位时对靠泊时机无要求,则t′=[ts]。[]为>ts的最小整数。
(6) 从乘高潮频率统计表中选择历时t′及保证率≥90%对应的潮位H(若90%的保证率对应的潮位不适应满载进港,则可适当降低保证率以提高选择的潮位)。
(7) 根据式(4)计算实际通航水深D1。
(8) 判断D0≤D1是否成立。若不成立,则根据dmax=D1-dUKC计算出可通航的最大吃水;若成立,则吃水为d0的满载船舶可安全航行,所选择的航速对符合要求。随后选择一对航速,转至步骤(1),最终求得可通航最大吃水和航速控制边界值。
求解简要流程见图4。
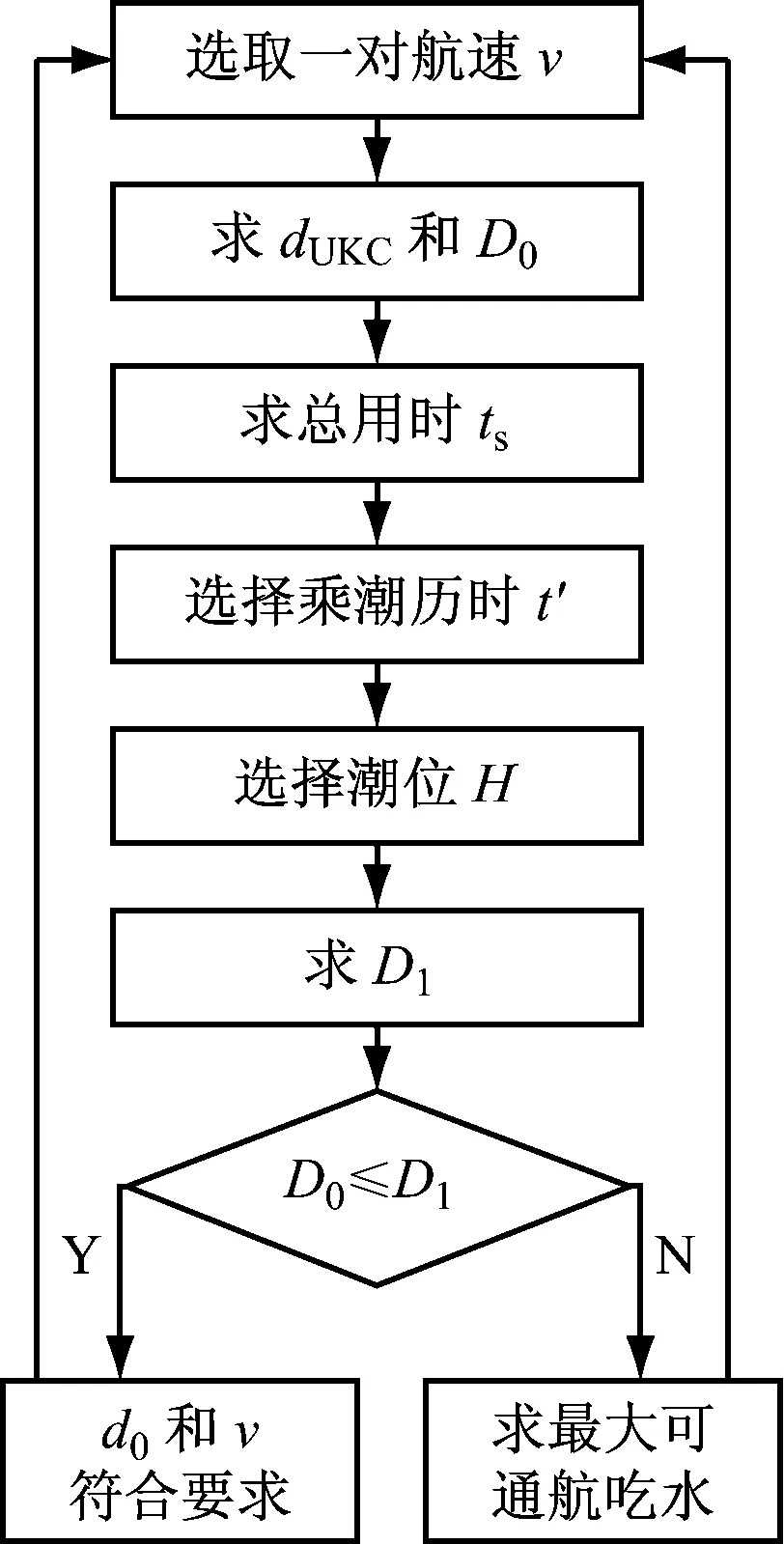
图4 富余水深应用流程
3.3潮汐规律的运用
上述富余水深应用方法根据总用时ts选择乘潮历时t′,虽然每段航速都可求出控制的边界值,但这种边界值并不严格,即指定航段的航速可选择其他航段的较大航速(仅考虑不触底)。若考虑到从乘潮开始潮位呈逐渐上涨的趋势(如图2所示),随着船舶的航行,潮位越来越高,潮位利用价值越来越大,则在富余水深应用过程中,可将潮位按航段作离散变化处理,水深和富余水深是离散变化的。
以董家口港航道PC为例,高潮前可利用的乘潮历时为3 h,在PA段航行时应选潮位历时t′=6 h。假设在PA段航行1 h,则航至A点时水位处于高潮前2 h的位置,可选4 h的乘潮历时,而不是6 h。这样充分利用潮汐规律,有可能提高可通航的最大吃水。然而,这种方法对航速控制的要求较严格,即在每段的用时不能超过预期值。假设在PA段航行1.2 h,航行至A点时未达到乘潮历时t′=4 h的潮位,则在AC段继续选择t′=4 h的潮位有可能在A点稍后发生触浅。
示例:根据董家口港航道的乘潮条件,判断航速对v=(vPA,vAB,vBC)=(9,8,5) kn时水深是否适应40万t满载船舶(d0=22.8 m)安全航行。
原理:根据式(6)得到航道水深适应40万t船舶安全航行的限定条件,即
(7)
式(7)中:SPA为PA段的长度;SBC为BC段的长度;Kt取1.1。
计算过程如下:
根据表3求得dUKC=(2.56,2.42,2.19) m,D0=(25.36,25.22,24.99) m;ts=(SPA/vPA+SPA/vAB+SBC/vBC+t靠泊+t制动)Kt=3.87 h<4 h。
由于高平潮靠泊且靠泊后可利用的时间为1 h,因此选择乘潮历时t′=[(ts-1)×2]=6 h。
应选历时6 h,保证率=90%对应潮位H=2.8 m。考虑PA段为天然航道,备淤0 m;AC段为人工开挖航道,备淤0.4 m。由此可得
1)PA段:D1=H+dep=26.0 m。
2)AC段:D1=H+dep=25.6 m。
故D1=(26.0,25.6,25.6) m。
由于D0≤D1,因此在乘潮潮位和乘潮历时的双重限制下,40万t满载船舶采用航速对(9,8,5)kn时富余水深符合安全航行的要求,即水深适应船舶进港。
此外,在航行至A点时,已用时Kt(SPA/vPA)=1.32 h,考虑潮位逐渐上升对船舶航行更有利。由于ts-tPA=2.55 h,t′=[(ts-tPA-1)×2]=4 h,因此AC段也可选择4 h的潮位,同样符合要求(见表4)。
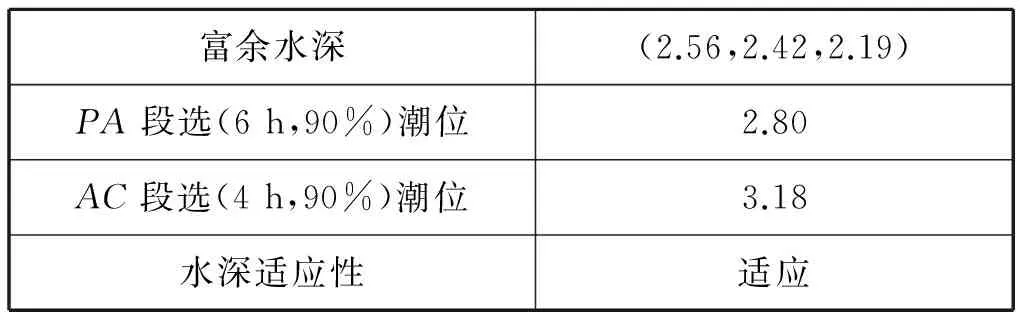
表4 速度对取(9,8,5) kn时水深适应性 m
类似地,可验证v=(8,7,5) kn时水深不适应安全航行,因为乘潮历时ts=4.13 h>4 h。
4 航速控制边界值
由上述分析可知,航道水深适应40万t船舶进董家口港,但要求航速控制在合理范围内。受制于潮位和潮位历时,航速既不能过快(防止触底),也不能太慢(不超过允许的乘潮历时)。根据富余水深应用方法,参照示例,可求得符合条件的经验航速对v=(vPA,vAB,vBC),用矩阵R表示为

(8)
得出航速控制边界值见表5,进而在模拟试验和专家咨询的基础上得到建议航速。船舶按建议航速航行,乘潮进港和靠泊历时4.0 h经过各点时刻的示意如图2所示。

表5 航速控制边界值
5 结束语
通过分析得到水深适应性结论:董家口港航道长18.6 n mile,航道设计底标高-23.2 m,40万t船舶抵港最大吃水22.8 m,若航速控制在边界值以内,则航道水深适应40万t船舶满载进港,乘潮保证率达90%。
该富余水深应用方法以《规范》作为参考取值,对其他理论取值法或经验取值法同样适用。研究结果对超大型船舶受限水域安全航行关键指标的确定具有重要意义。
[1] 戴涛,何志水.VLOC船舶航行在浅水域中的富余水深[J].航海技术,2014(2):8-11.
[2] 吴卫兵,谢黎明.富余水深的2种确定算法[J].航海技术,2014(4):37-38.
[3] 洪碧光,于洋.船舶在浅水中航行下沉量的计算方法[J].大连海事大学学报(自然科学版),2003,29(2):1-5.
[4] 刘敬贤,高纬杰.基于大风浪影响的船舶安全通航水深计算方法[J].交通标准化,2009(1):92-95.
[5] 徐言民,晏林,许鹏,等.渤海海域超大型船舶安全航速限定标准研究[J].中国安全科学学报,2013,23(1):95-100.
[6] 肖潇,邵哲平,纪贤标,等.基于AIS信息的船舶进出港航速控制模型[J].上海海事大学学报,2014(4):11-14.
[7] 曲径,韩晓宝,陈伟.渤海超大型油轮安全保障研究[J].中国航海,2010,33(2):51-55.
[8] BRIGGS M J,SILVER A W L,KOPP P J.Probabilistic Model for Predicting Ship Under Keel Clearance:Field and Laboratory Validation[J].Coastal Engineering Journal,2014,56(2):107-108.
[9] SZYCA G.Comprehensive Methods of the Minimum Safe Under Keel Clearance Valuation to the Restricted Tidal Waters[J].Transnav the International Journal on Marine Navigation & Safety of Sea Transportation,2012(6):63-68.
[10] BRIGGS M J,KOPP P J,SILVER A L,et al.Probabilistic Model for Predicting Deep-Draught Channel Design:Savannah,GA Entrance Channel[J].Ocean Engineering,2015,108:276-286.
[11] 交通运输部.海港总体设计规范:JTS 165—2013[S].
[12] 郭国平,王红兵.超大型油轮过马鞭洲航道时安全航速的探讨[J].中国水运(学术版),2006(6):38-40.
WaterDepthInvestigationforDongjiakouPortReceiving400000tCarrierbyTide
TANGCunbao1,2,ZHANGLiang2,LIUJingxian2,LIUChuanrun1,LIHuanhuan2
(1.Navigation Department,Guangzhou Maritime Institute,Guangzhou 510725,China;2.School of Navigation,Wuhan University of Technology,Wuhan 430063,China)
Whether Dongjiakou Port is suitable for receiving 400 000 t carriers from the angle of water depth is investigated.The arrival maximum draft of the 400 000 t carrier is calculated.Because the channel is long and is composed of a few sections of different characteristics,the analysis takes the tide condition and pattern into consideration and making full use of the Under Keel Clearance (UKC).Thorough investigation of the relationship among water depth,tidal height,draft,and UKC leads to maximized effective water depth.The boundary value of speed control is also determined.The results of the analysis show that the water depth of Dongjiakou Port channel satisfies the requirements of full load entry of 400 000 t carrier,under the condition that the ship speed is limited within the boundary,and the UKC is to be kept according to the “Design Code of General Layout for Sea Ports”.
400 000 t carrier; UKC; application method; tide-taking; speed control
U658
A
2017-01-15
国家自然科学基金(51479156);交通运输部建设科技项目(2015318J34090);广州航海学院创强工程科研项目(2014E063;2017E20)
唐存宝(1983—),男,山东菏泽人,讲师,博士生,从事交通信息工程及控制研究。E-mail:hellon@qq.com
刘敬贤(1967—),男,湖北孝感人,教授,博士,从事水上交通环境与安全保障技术研究。E-mail:ljxteacher@ sohu.com
1000-4653(2017)02-0060-05
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07
气象水文海洋仪器(2022年2期)2022-07-08
汉字汉语研究(2021年1期)2021-06-11
汉字汉语研究(2021年1期)2021-06-11
小雪花·小学生快乐作文(2020年2期)2020-10-23
Plasma Science and Technology(2020年5期)2020-06-14
红楼梦学刊(2019年5期)2019-04-13
海外星云(2015年15期)2015-12-01
中国水运(2015年10期)2015-11-09
大众考古(2014年2期)2014-06-26