基于视频的双模型卡口触发算法
2017-10-24 12:04谭中慧
上海船舶运输科学研究所学报 2017年3期
刘 俊, 谭中慧
(中远海运科技股份有限公司,上海 200135)
基于视频的双模型卡口触发算法
刘 俊, 谭中慧
(中远海运科技股份有限公司,上海 200135)
地磁感应线圈是一种传统的卡口触发信号源,该信号源原理简单,性能稳定可靠,但其施工不便、容易损毁等诸多问题在现代交通中逐渐凸显。随着视频监控的高清化、数字化程度逐渐提高及数字图像处理技术的进步,出现了以视频图像本身为信号源的牌照识别卡口触发和基于多级分类的车辆模型触发等新的卡口触发方式。前者对于车牌污损和无牌车辆不能提供较好的解决方案,后者不仅计算量大,且较难提取出通用性较好的车辆分类器。提出利用视频图像虚拟线圈技术,利用视频灰度时序实现车辆目标触发,并通过车辆平面模型编码特性消除遮挡误差。该算法运算速度快,可自适应地动态调整检测参数,具有环境适应性强和鲁棒性高等优点。
卡口;线圈;视频;灰度;遮挡
0 引 言
交通卡口抓拍系统在国内推行时间较早,应用较为广泛。传统卡口抓拍系统的设备主要以一种纯物理接触式的地磁感线圈触发为主,该系统原理简单、使用时稳定可靠。然而,线圈铺设需开挖路基,影响交通,且因长时间受到车辆碾压而容易损毁。近年来,随着交通压力的逐步加大,线圈的弊端逐渐显露。
目前,已有部分国内外科研机构、设备厂商将牌照识别和Haar分类器等技术应用到最新的产品中。牌照识别触发是一种视频有源触发,将牌照作为目标源,在图像目标区域内不断进行扫描、搜索,定位牌照从而实现精确触发,但牌照识别触发方式对于牌照污损的车辆和无牌车辆不能提供很好的解决方案。Haar分类器技术则是根据目标的边缘、线条、中心对称及对角线等Haar特征,利用Adaboost分类算法创建一系列分类器,通过计算目标特征参数,判定目标类别,但该算法计算量大,很难训练出通用程度较高的分类器,算法检测准确率仍有待提高。
为解决传统线圈触发式的缺陷,采用基于视频的虚拟线圈触发算法,同时为弥补牌照识别技术和Haar分类器算法的不足,利用视频图像灰度分布时间和空间特性,提取目标时间模型和空间模型,提出视频、图像双模型触发算法。该算法具有效率高、通用性好和抗干扰性强等优点。
1 触发模型建立
虚拟线圈检测算法即按照实际线圈的布设模式,在视频图像中每个车道的适当位置划定一个实际线圈大小的检测区域,在该线圈内对视频图像进行分析计算,判定有无车辆进出。与实际地感线圈相似,虚拟线圈以外部分不用计入分析范围。
设视频图像分辨率为M×N,每条车道虚拟线圈沿车道横截面方向设置,则虚拟线圈检测模型见图1。图1a)中设置3条白色车道横截线表示虚拟线圈;图1b)中对应的白色区域为虚拟线圈所包含的图像范围,其内部像素即为检测分析对象;其他黑色区域在灰度特征提取过程中不必纳入分析范围。
灰度特性提取模型为
(1)
式(1)中:m(i)表示图像中第i个像素是否需要检测;1表示该像素在线圈内,需要检测;0表示不在线圈内;集合φ表示线圈所包含的像素集合。
2 线圈灰度特性提取及时间建模
线圈内某像素点灰度值(Y分量)时间分布曲线见图2。图2b)中,下面为Y分量时间分布曲线,上面为像素点前后相邻帧对应Y值的差值曲线,竖直分割线表示当前帧所在位置。线圈内没有车辆通过时,灰度值在路面灰度上下小范围波动,总体趋向路面灰度值,前后相邻帧灰度差值趋向0。车辆通过该像素点位置时,灰度值上下大幅度波动,灰度差异值成倍增大。车辆经过之后,像素灰度值再次回归路面灰度值。因此,像素灰度值在时间序列上具有较好的收敛性和鲁棒性,满足以路面灰度为对称中心的正态分布。
设灰度时间分布函数为Yt,灰度差时间分布函数为Dt,则单位像素灰度特性曲线为
(2)
式(2)中:a为正态分布分布均值,代表路面灰度值;δ1t为灰度值随机波动;δ2t为灰度差值随机波动。a值为一个常数,可通过平均法或统计法计算,以一定时间间隔为周期,可实现自适应更新。
设F(i)t为对应像素点目标检测函数,有车通过时其值为1,无车时其值为0,则其计算式为
(3)
式(3)中:σ1为灰度时间函数置信区间阈值;σ2为帧差函数置信区间阈值。
综合线圈所有像素点量化结果,即可得到线圈时间序列模型函数为
(4)
式(4)中:Φ(i)t为某时刻某线圈有无车辆状态值;Σ(1)为F(i)t=1的像素点个数总和;T为常量,代表线圈状态统计高通滤波阈值。
线圈内车辆目标点数及线圈状态曲线结果见图3,其中,N表示线圈内正在通过的目标所占的像素点的个数,线圈状态中矩形方波表示有车通过。
3 基于车辆平面建模的遮挡和跟车问题解决方法
若摄像机照射角度与车道成一定夹角(见图4),大车通过时可能遮挡临近车道,造成临近车道误判。遮挡是视频交通检测中的普遍现象,这里提出通过车辆平面建模解决临近车道遮挡问题。
选取进入检测线圈的2个目标(见图5)。对比图5a)和图5b)不难发现:图5b)中实际车辆车头前方有明显黑色阴影,且具有普遍性;图5a)中虽然由于车身造成视觉遮挡,压碰最左侧车道虚拟线圈,但明显不具有实际车辆特征。
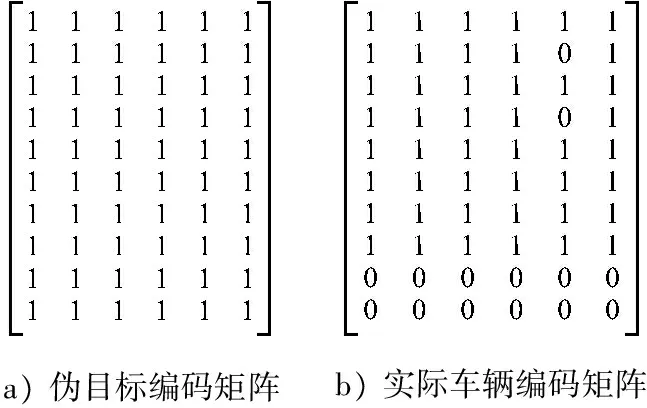
a)伪目标编码矩阵b)实际车辆编码矩阵
图6伪目标和实际车辆模型矩阵
以常量B为灰度阈值,对伪目标和实际车辆进行二值矩阵编码,灰度值>B编码为1,否则编码为0。伪目标和实际车辆对应的平面模型分别见图6a)及图6b)。
当车辆从远往近进入虚拟线圈时,从下往上逐行扫描图6的目标矩阵。因此,统计线圈内像素点在时间序列上编码为0的像素点个数,便可得到线圈阴影时间序列曲线,进而判断是否为实际车辆通过。
由于临近车道遮挡造成车道状态为1时(见图7),相应的线圈0编码时序图中对应找不到有效的输出脉冲,证明对应实际目标不满足车辆平面模型关系,据此可排除遮挡误判。

a)车道遮挡实际效果图b)车辆平面模型伪目标消除
图7车辆平面模型去除车道遮挡误判示意
临近车道同时有目标车辆经过(见图8),近车道大车遮挡远车道车辆,但远车道车辆前方阴影仍可见,故远车道仍能有效地检测车辆。

a)车道遮挡实际效果图b)车辆平面模型伪目标消除
图8部分遮挡车辆有效触发示意
流量较大时,跟车容易造成遮挡,车辆平面特征减弱,车辆分割难度加大,导致很难区分单车特性,为解决该问题,在跟车现象密集路段从2方面进行改进。一方面,适当加大摄像机安装俯角,使摄像机主要聚焦在较近处,有效增加目标成像间距;另一方面,将卡口触发虚拟线圈设置在图像近端,有助于拉开目标成像间距,降低跟车影响,其原理见图9。
4 基于车道方向及线圈状态的触发点判定
为实现车头或车尾位置精确抓拍,根据图7所示线圈状态曲线图,结合车道方向实现目标精确触发。
设定车道方向为来向,车辆由远及近行驶,需抓拍车头特写图片,因此在车辆刚进入线圈,即线圈状态曲线上升沿进行触发;若车道方向为去向,则情况相反,只能对车尾特写图片进行抓拍,应该在车尾离开线圈,即线圈状态曲线下降沿触发。线圈状态曲线矩形方波持续时间为目标通过卡口时间,可用于计算车型。
车道为来向,车头触发时机、车尾位置计算式为
(5)
式(5)中:T(t)为触发时间;L(t)为离开时间;Φ(i)t1-1和Φ(i)t1+1为t时刻前后线圈状态值。
车辆通过i线圈所用时间计算式为
F(i)=t2-t1
(6)
式(6)中:F(i)为车辆通过线圈的时间。
车道方向为去向,相应的目标到达线圈位置时间计算式为
(7)
F(i)=t2-t1
(8)
式(7)中:C(t)为车辆到达线圈时刻。
以车道来向为例,车辆触发时序及对应实际触发效果见图10。

a)车道状态时序b)触发效果
图10车道状态时序及实际触发效果
5 算法试验
以沪嘉高速公路监控视频录像为测试样带,环境为普通监控视角、夜间路灯照明、无补光,视频图像分辨率为1 920×1 080,视频格式为H.264。分别对阴天及雨天早、中、晚和夜间视频进行测试,结果见表1。
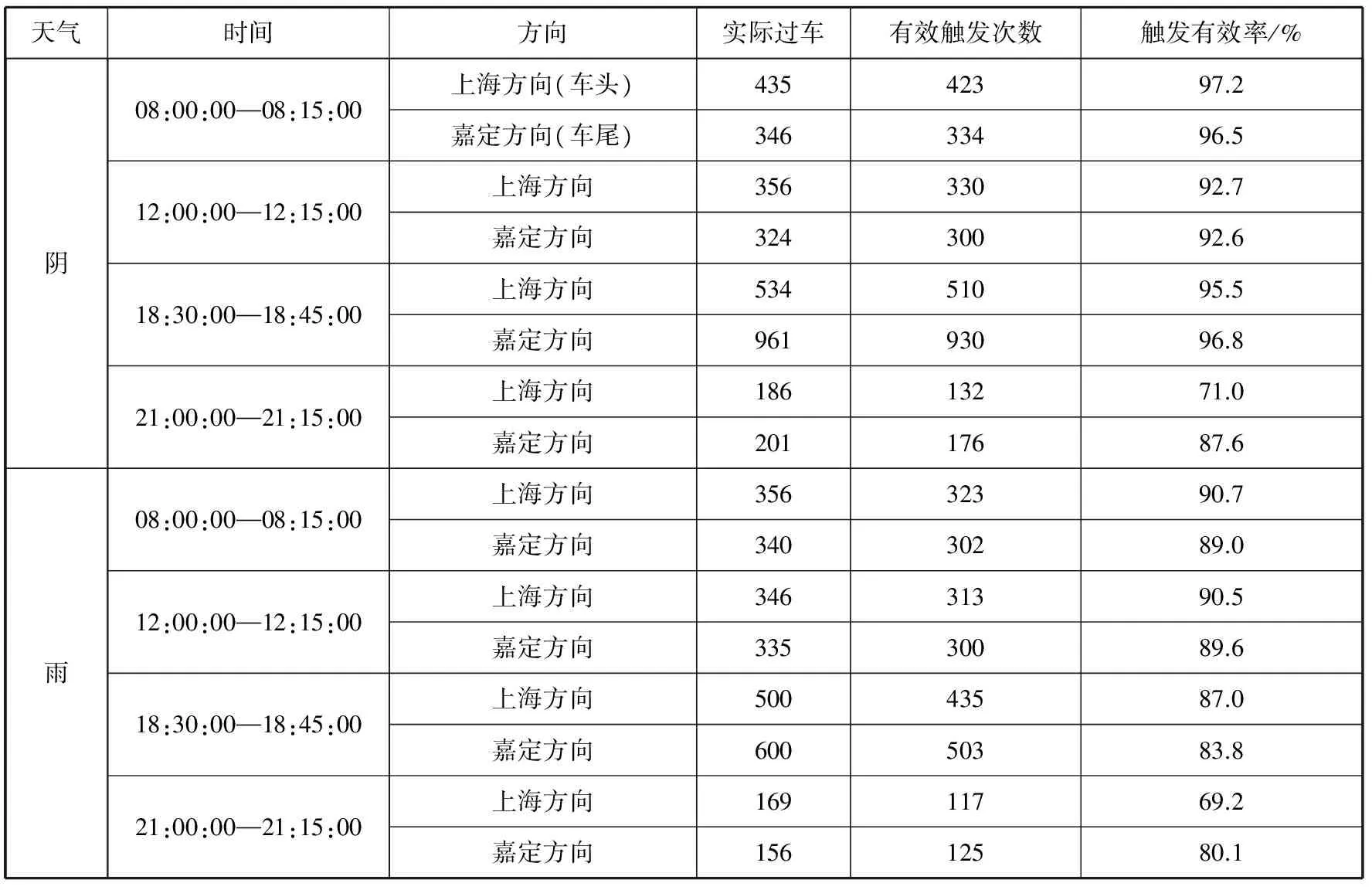
表1 卡口触发算法测试数据
由表1可知:该算法在晴好天气下准确率高,在雨天稍低;同一天内白天准确率较高,夜间稍低。对数据进行分析可知,该算法与传统线圈触发相比主要具有以下优劣点:
1)纯视频触发,不需增加额外装置,可做到监、抓共用;
2)传统方式地感线圈容易损毁,安装维护时需开挖路面,施工成本高,该算法方案硬件设施不易损毁,施工成本小;
3)该算法由于采用非接触式视频触发方式,易受到光线、天气和角度等影响,易使成像质量等发生变化,算法在抗干扰方面还有较大提升空间。
6 结 语
通过研究基于视频的卡口触发算法,运用虚拟线圈技术,根据线圈内图像总体灰度时间分布特性和目标车辆在平面空间的规律性灰度分布特性,提出基于时间和空间双重模型的卡口触发算法。试验结果表明,该算法的触发准确率高,能有效消除遮挡影响;该算法关键参数不依赖具体车辆、车型,具有较好的通用性和稳定性。该算法不仅能实现精确触发,还能确定目标车辆的车头和车尾,计算车长,对进一步识别目标车型、提取其他交调参数具有较好的辅助作用,应用价值较高。
[1] 谭中慧,张勇. 视频图像目标侦测及改进算法[J].上海船舶运输科学研究所学报,2016,39(4):67-72.
[2] 甘玲,李瑞. 基于自适应虚拟线圈的多车道车流量检测算法[J].自动化学报,2016,36(12):3511-3514.
[3] 袁彬,张勇. 基于图像纹理分析的交通拥堵检测算法研究[J].上海船舶运输科学研究所学报,2015,38(4):77-79.
[4] 汪国强. 基于背景差分法的视频目标检测算法研究[J].黑龙江大学工程学报,2014(5):64-68.
[5] 徐钲,贺波涛. 虚拟卡口系统的设计[J].电子测试,2014(24):6-9.
[6] 张海燕. 高清卡口系统设计[J].中国交通信息化,2012(12):137-139.
[7] 曲宝珠,曹国,刘宇,等.基于多特征集成的卡口图像前车窗的定位算法[J].信息技术,2016(12):19-24.
[8] 邝先验,朱磊,吴赟,等. 基于Adaboost算法和颜色特征的公交车辆视频检测[J]. 广西师范大学学报(自然科学版),2016,34(1):9-18.
[9] 杨丽琴. 高速公路车道高清卡口系统实施方案[J]. 中国交通信息化,2015(6):107-108.
[10] TAN Z H,ZHANG Y,SONG J F. A Regional Rotation Algorithm of Video Images[C]//2012 5th International Congress on Image and Signal Processing IEEE,2012:190-192.
[11] 谭中慧,张勇. 利用轨迹跟踪的视频交通事件检测算法[J].上海船舶运输科学研究所学报,2013,36(2):26-31.
VideoBasedDualModeTrafficTriggeringAlgorithm
LIUJun,TANZhonghui
(COSCO SHIPPING Technology Co., Ltd., Shanghai 200135, China)
Geomagnetic induction coil is a traditional traffic trigger signal source. The principle is straightforward, and the performance stable and reliable. But it is easy to damage and involves construction work. On the other hand, as the improvement of the video surveillance equipment and the progress of the digital image processing technology, some new traffic trigger modes based on video itself, such as video license plate recognition and multi-level classification of vehicle model triggering, come along. The former can not deal with license plate defacement or unlicensed vehicles, and the latter is not only computationally intensive, but vehicle classification model dependent. A meaningful vehicle classification model takes effort to build. This paper proposes the video image virtual coil technology, with the video gray level timing to achieve vehicle target trigger, and the vehicle discrimination on basis of their plane model coding characteristics to eliminate the occlusion error. The algorithm is fast and adaptive, and has high ambient tolerance and robustness.
traffic; detection coil; video; grayscale; shelter
TP391.41
A
2017-06-05
刘 俊(1977—),男,江西鄱阳人,高级工程师,主要从事智能电子产品研究。
1674-5949(2017)03-0064-07
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
铁军(2020年3期)2020-04-17
中国信息技术教育(2020年2期)2020-02-02
电子制作(2019年11期)2019-07-04
影像视觉(2019年2期)2019-03-04
摄影之友(2018年12期)2018-12-26