基于逆向模式的混合动力系统控制策略研究
2017-10-23 10:19王云龙张洪田孙远涛张金柱
黑龙江工程学院学报 2017年5期
王云龙,张洪田,孙远涛,张金柱
(黑龙江工程学院 汽车与交通工程学院,黑龙江 哈尔滨 150050)
基于逆向模式的混合动力系统控制策略研究
王云龙,张洪田,孙远涛,张金柱
(黑龙江工程学院 汽车与交通工程学院,黑龙江 哈尔滨 150050)
混合动力系统控制器作为车辆的大脑,承担着协调、支配混合动力车辆各动力系统高效工作的重要任务,而控制策略是保障大脑正常工作的经络,也是车辆控制器的核心部分。通过对混合动力汽车进行各工况的试验测试,来逆向研究混合动力系统控制策略,分析混合动力汽车在不同工况下其控制策略,从而开发混合动力系统控制器。结果表明:开发的混合动力系统控制器能够有效地协调、支配各动力系统高效工作,车辆经济性、排放性均有所改善。
混合动力系统;控制器;测试工况;控制策略
能源危机日趋严重,燃油价格一涨再涨,各地油荒不断出现,传统内燃机汽车发展深受能源危机的影响,导致汽车制造商纷纷将车辆研发重点放在新能源汽车领域。目前,常规的新能源汽车主要有电动汽车、混合电动汽车和燃料电池汽车,纯电动汽车虽然是零排放,但是由于蓄电池容量和充电时间等技术瓶颈,可行性和实用性不够完善。而燃料电池汽车又因其研发费用、使用费用和燃料技术等问题距离实际使用有一定距离。混合动力汽车汇集传统汽车与电动汽车的优点,成为当前最有竞争力且切实可行的做法,混合动力汽车一方面可以利用传统汽车的技术成果和工业基础,另一方面可以有效降低油耗,减少排放,更适合于目前汽车技术的发展水平[1-2]。混合动力系统的设计与控制是混合动力汽车降低燃油消耗和改善排放效果的主要原因,运用合理的优化控制策略,有效进行能量回收,这也是混合动力汽车的主要核心技术。混合动力系统控制策略研究主要集中在串联和并联两种结构形式上,而针对混联结构形式的研究相对较少,混联式混合动力系统结合串联和并联两种结构形式的优点,在动力控制上有更大的灵活性,可以实现油耗和排放的最佳控制目标[3-13]。本文研究基于某高强度混联式混合动力汽车道路试验数据,逆向分析、研究其控制器的控制策略[14-16],并基于此控制策略开发混联式混合动力系统控制器。
1 混合动力汽车运行工况试验
1.1 车辆主要技术参数
某混联式结构形式的混合动力汽车,其动力系统由行星齿轮装置将发动机、发电机和电动机连接起来,动力从发动机输出到与其相连的行星架,行星架将一部分转矩传送到发电机,另一部分传送到电动机并输出到驱动轴,电机MG1和太阳轮相连,电机MG2连接在齿圈上,齿圈再通过齿形带和主减速器相连(见图1),车辆的主要技术参数见表1。
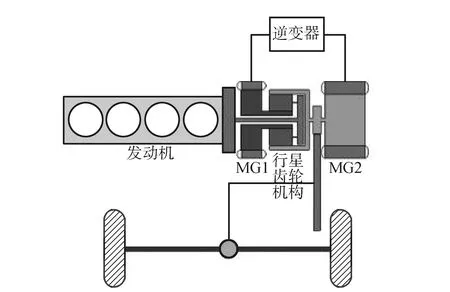
图1 混合动力系统结构
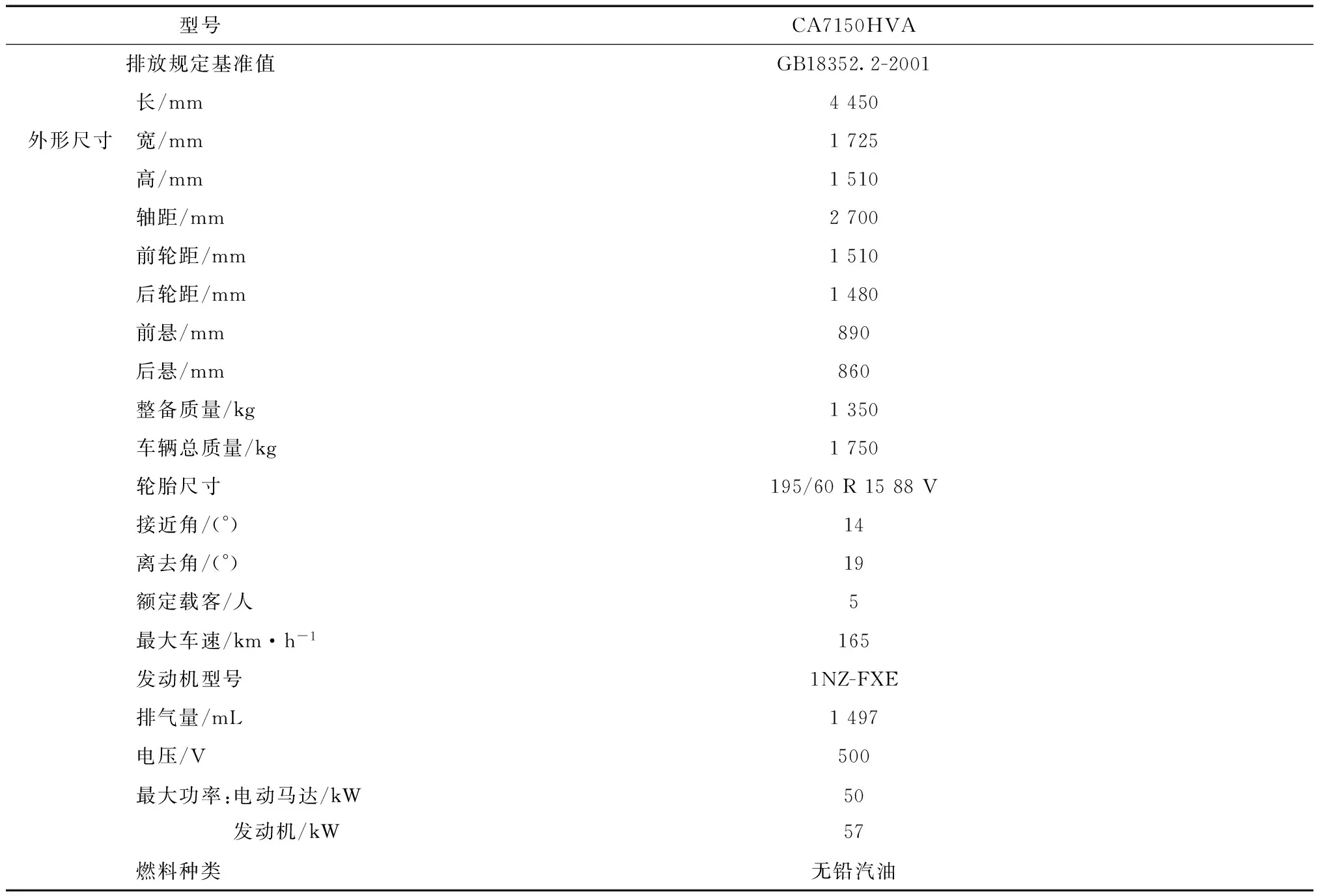
型号CA7150HVA排放规定基准值GB18352.2-2001长/mm4450外形尺寸宽/mm1725高/mm1510轴距/mm2700前轮距/mm1510后轮距/mm1480前悬/mm890后悬/mm860整备质量/kg1350车辆总质量/kg1750轮胎尺寸195/60R1588V接近角/(°)14离去角/(°)19额定载客/人5最大车速/km·h-1165发动机型号1NZ-FXE排气量/mL1497电压/V500最大功率:电动马达/kW 发动机/kW5057燃料种类无铅汽油
1.2 车辆各运行工况及工作模式
车辆各运行及工作模式的相关试验均围绕电池荷电状态(荷电状态,又称剩余电量,英文为State of Charge,简称SOC)电池SOC值的大小来展开,按照电池SOC值偏低(25%~45%)、电池SOC值中等(45%~60%)、电池SOC值较高(60%~70%)等,检测发动机转速、电机转速、电池SOC值等参数变化。
1)车辆启动。发动机启动试验分低温试验和常温试验,低温试验时室外温度-10~-6 ℃,实验前使发动机冷却液温度与外界温度一致;常温试验时室外温度20~25 ℃,常温启动分为冷车启动和热车启动。
低温试验:如果蓄电池没有严重亏电,发动机启动时,由蓄电池给电机MG1提供电能,电机MG1拖动发动机到开始工作;常温试验:电池SOC值较低时,冷车启动和热车起动,发动机马上开始工作,发动机转速为1 200 r/min。电机MG1作为发电机给蓄电池充电,直到电池SOC值上升到50%,发动机停止工作。电池SOC值超过60%以上时,启动车辆2 min发动机仍不工作。
2)起步工况。①电池SOC值小于45%:车辆启动时发动机马上开始工作。发动机转速在1 200 r/min,开始阶段电机MG2作为电动机,电能由电机MG1提供,电机MG2提供输出扭矩。随着转速升高而降低;电机MG1作为发电机产生电能,一部分为电机MG2驱动汽车前进,一部分为蓄电池充电。后阶段由于整车扭矩需求较少,电机MG1、电机MG2均作为发电机。②电池SOC值大于45%时:车辆启动时发动机不工作,电机MG2作为电动机提供输出扭矩驱动汽车前进,电机MG1随动。之后随着车速升高,电池SOC值下降,需求功率增加,发动机开始工作,一部分动力直接驱动车辆,另一部分动力分给电机MG1。电机MG2仍作为电动机,但输出扭矩随速度升高逐渐下降。电机MG1作为发电机产生的电能一部分驱动电机MG2,另一部分为蓄电池充电。
3)加速工况。加速试验分为全负荷加速试验和部分负荷加速试验,两种试验按照电池SOC值高低和速度变化分别进行试验,本文主要针对全负荷加速试验情况(见表2),部分负荷加速试验情况见文献[15]。
4)匀速工况。按照电池SOC值变化,进行10 km/h、20 km/h、30 km/h…80 km/h等匀速试验:①电池SOC值小于45%。车辆在低速匀速行驶时,由于电池SOC值较低,发动机以较低转速运转,直接驱动汽车。由于发动机转矩大于驱动转矩,剩余转矩驱动电机MG2发电,为蓄电池充电。电机MG1作为调速电机,使发动机运行在优化的工作区域。②电池SOC值为45%~60%。车速较低时,车辆以纯电动模式工作,发动机静止,电机MG2作为电动机驱动车辆,电机MG1随动,当电池SOC值下降到45%时,发动机开始工作。③电池SOC值大于60%。驱动车辆的需求功率较小时,车辆以纯电动模式工作,电机MG2驱动车辆,电机MG1随动;驱动车辆的需求功率较大时,发动机开始工作,电机MG2作为发电机为蓄电池充电。发动机处于优化区域工作,如果发动机转矩大于驱动转矩需求,则电机MG1作为发电机为蓄电池充电。
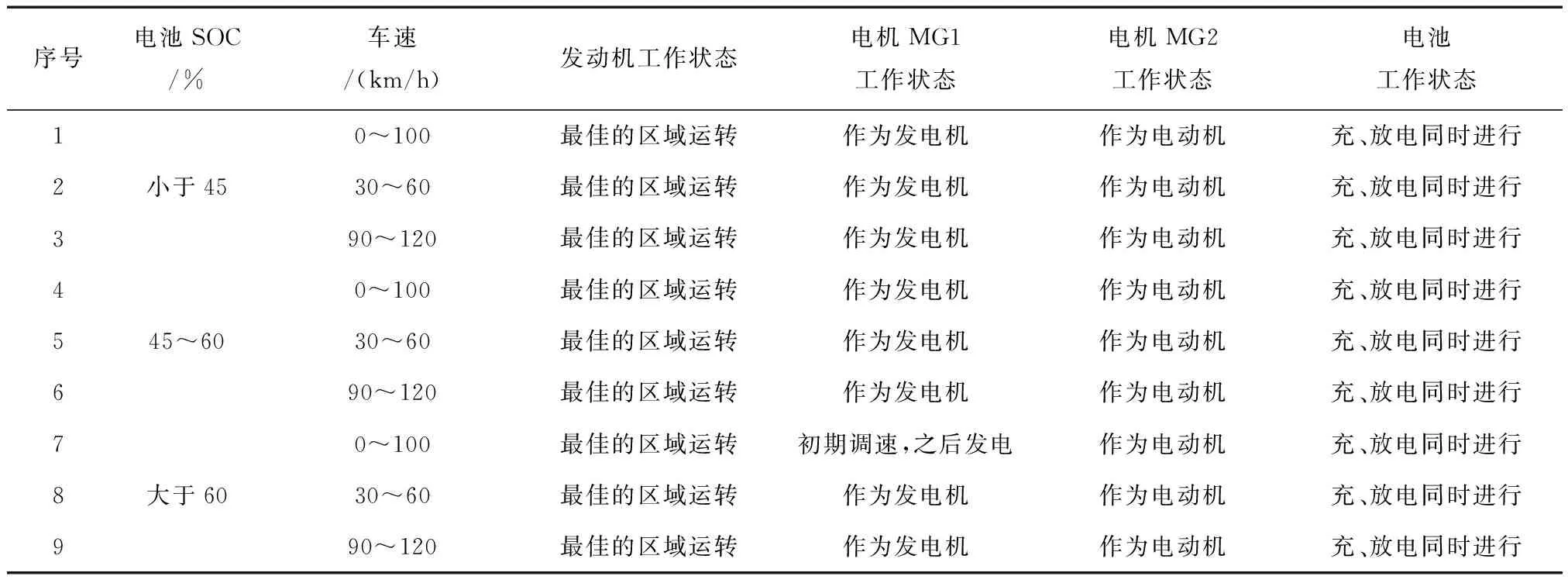
表2 车辆全负荷加速试验
5)减速工况。减速试验时分为带档滑行试验和空档滑行试验。带档滑行试验分为高速滑行试验和低速滑行试验。
带档滑行时,如果蓄电池电量不是特别低,则发动机马上停止工作,电机MG2作为发电机进行能量回收,电机MG1随动;如果蓄电池电量很低,则发动机不会停止喷油,电机MG1作为调速电机,电机MG2工作在优化区域,电机MG2作为发电机为蓄电池充电。带档滑行过程中,如果电池SOC值很高,即使车辆仍然在滑行,电机MG2也不为蓄电池充电。空挡滑行时,即使蓄电池电量特别低,电机也不为蓄电池充电。
6)倒车工况。倒车试验按照电池SOC值小于45%和电池SOC值大于45%两类进行试验,试验过程中不对车速进行分类,只考虑电池SOC值对车辆运行模式的影响。
当电池SOC小于45%时,蓄电池处于亏电状态,发动机工作,直接驱动汽车。如果当驱动功率有剩余时,发动机一方面驱动汽车,另一方面通过电机MG2为蓄电池充电;当SOC值大于45%时,电机MG2作为电动机驱动汽车,当电池SOC值降低到设定值后发动机重新启动。
2 混合动力系统控制策略
定义变速器输入轴的扭矩请求Treq、发动机扭矩输出Te、电机扭矩Tm和摩擦制动扭矩Tb,以便分析车辆各种运行模式,其关系式为
Treq=Te+Tm+Tb.
此外,定义发动机当前最大扭矩Te_max,发动机最佳工作区最大扭矩Te_opt_max,发动机最佳工作区最小扭矩Te_opt_min,发动机最佳工作点扭矩Te_opt_best,电机当前最大驱动扭矩Tm_max,电机当前最大发电扭矩Tm_gen_max,电池当前电量SOC,电池过低电量SOC_too_low,电池过高电量SOC_too_high,电池电量中等SOC_medium。
2.1 发动机单独驱动的工作模式
发动机单独驱动是指发动机能够在定义的最佳区域工作,自身的效率比较高。该工作模式的车辆与传统内燃机汽车相同。
如果请求扭矩Treq位于当前发动机最佳区域内,并且电池的电量较高:
Te_opt_min
那么发动机输出扭矩等于请求扭矩:Te=Treq。
2.2 电机单独驱动的工作模式
电机单独驱动是指由蓄电池给电机提供电能,电机驱动车辆,发动机不参与工作。该工作模式的车辆与电动汽车一样。
如果请求扭矩Treq小于发动机最佳区域的最小扭矩值,也小于电动机当前的最大驱动扭矩,并且电池的电量较高:
0
那么电动机输出扭矩等于请求扭矩:Tm=Treq。
2.3 发动机驱动且电机发电的工作模式
发动机驱动且电机发电的工作模式是指发动机为车辆提供驱动动力的同时,富余的动力用来带动电机发电,为蓄电池充电。
1)如果请求扭矩Treq小于发动机运行的最佳工作区域的最小扭矩,并且电池的电量不是过高:
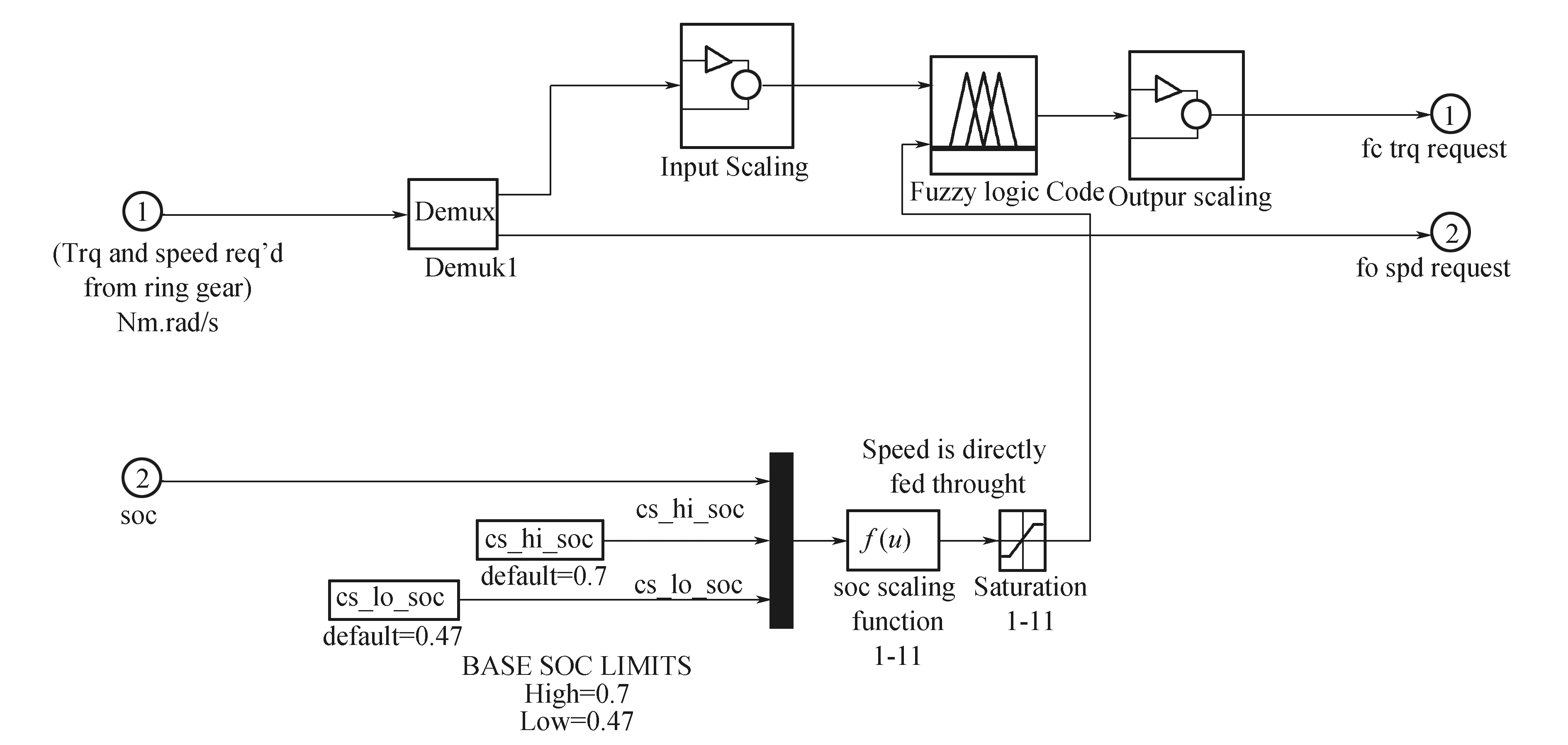
0 那么发动机的输出扭矩等于电机的请求扭矩与电机的发电扭矩之和:Te=|Tm|+Treq。电机发电产生电能,Tm的值为负值,绝对值的最大值应小于下列3个值中的最小值:①电机在当前转速下允许的最大发电扭矩Tm_gen_max;②发动机的最佳工作点扭矩与请求扭矩的差值Te_opt_best-Treq; ③电池功率限制的最大扭矩Tbat_max。 发动机的输出扭矩Te=Treq-Tm。如果电池的电量很高SOC>SOC_too_high,则切换到发动机单独运行的工作模式。 2)如果请求扭矩Treq处于发动机当前的最佳工作区域内,并且电池的电量较低时: Te_opt_min 同样,发动机的输出扭矩等于请求扭矩与电机发电扭矩之和:Te=|Tm|+Treq。电机发电产生的电能,Tm的值为负值,绝对值的最大值选取小于下列3个值中最小值:①电机当前最大的发电扭矩Tm_gen_max; ②发动机最佳工作区的最大扭矩与请求扭矩的差值Te_opt_max-Treq;③电池功率限制的最大扭矩Tbat_max。 如果Tm+Treq 2.4 发动机和电机共同驱动的工作模式 发动机和电机并联驱动的工作模式属于请求扭矩较大情况下的车辆运行模式,通常为车辆急加速、上坡和高速行驶等需要较大扭矩运行的工况,电机利用蓄电池中储存的电能为发动机进行助力,使得车辆获得较大的扭矩输出: 1)如果请求扭矩Treq大于发动机当前的最大扭矩输出时,那么发动机输出当前转速下的最大扭矩值,电机输出最大扭矩或不足部分的扭矩值: Te=Te_max, Tm=min(Treq-Te_max,Tm_max,Tbat_max). 2)如果请求扭矩Treq大于发动机最佳工作区域的最大扭矩,并且小于发动机当前的最大扭矩值Te_max,同时电池电量不低。若电机当前提供的最大扭矩与发动机最佳工作区域的最大扭矩之和能够满足请求扭矩的需求,那么发动机以最佳工作区域的最大扭矩输出,电机弥补不足部分的扭矩: Te=Te_opt_max,Tm=Treq-Te_opt_max. 若电机当前提供的最大扭矩与发动机最佳工作区域的最大扭矩之和不能满足请求扭矩的需求,那么电机则以当前能够提供的最大扭矩输出,发动机弥补不足部分的扭矩: Tm=min(Tm_max,Tbat_max),Te=Treq-Tm. 基于ADVISOR软件利用MATLAB/SIMULINK二次开发混联式混合动力系统控制器[8],模糊控制系统由4个控制器组成,分别为驾驶员意图预测器、功率平衡控制器1、功率平衡控制器2和制动能量回收控制器,详见文献[1]。 按照电池SOC值确定充、放电,基本原则是保障电池有充足的电能,达到上限值不再进行充电,避免电池SOC长时间处于下限值;当电池SOC值处在上限时,为避免过度充电,制动控制调整到只有摩擦制动,无制动能量回收。 模糊控制规则方面,驾驶员意图预测器控制规则库由21条规则组成,反映驾驶员意图,预测车辆工况需求的扭矩;功率平衡控制器1和功率平衡控制器2规则库均由33条控制规则组成;制动能量回收控制器规则库由12条控制规则组成,整个模糊混合动力控制系统由99条控制规则组成,详见文献[1]。 按照模糊控制器的设计和控制策略,利用MATLAB/SIMULINK开发模糊控制器,包括隶属函数的绘制、模糊规则的编写以及反模糊化的过程,创建模糊控制器模块见图2。 该模糊控制器植入ADVISOR软件平台下的混联式混合动力控制系统中进行混联式混合动力汽车仿真试验。根据美国城市工况UDDS、日本10-15和欧洲EUDS等国际测试循环进行仿真试验,分析该混联式混合动力汽车的燃油经济性以及排放性。结果表明,混联式混合动力汽车安装原控制器与新开发的模糊逻辑器相比,上述3种国际测试循环的百公里油耗分别降低了2.2%、19.7%和6.4%,排放总量降低了4.3%、0.4%和11.3%。 图2 模糊控制器模块 本文通过对混合动力汽车实车的道路试验数据进行分析,逆向出混合动力系统控制器的控制策略和方法,从而基于该控制策略和方法构建全新的混合动力系统控制器,并与同一仿真平台的原车进行仿真实验对比。结果表明,新开发的混合动力系统控制器在燃油经济性和排放性等方面均优于原车。 [1] 王云龙,张洪田.混联式混合动力系统模糊控制器研究[J].武汉理工大学学报(交通科学与工程版),2013,37(4):733-736. [2] 孙远涛,张洪田.混合动力汽车研究状况及发展趋势[J].黑龙江工程学院学报(自然科学版),2011,25(2):13-16. [3] 何小路,鲍久圣,阴妍,等.混合动力车辆控制策略研究现状[J].机械传动,2017,41(1):196-200. [4] 钟彦雄.并联式混合动力汽车能量管理策略[J].科技与创新,2017(2):75-76. [5] 邓晓亭,鲁植雄.并联式混合动力汽车控制策略的研究分析[J].轻型汽车技术,2014(6):3-7. [6] 刘汉如.并联混合动力汽车模糊逻辑控制策略仿真研究[J].安徽科技,2014(8):42-43. [7] 李军,朱亚洲,纪雷,等.混合动力汽车模糊控制策略优化[J].汽车工程,2016,38(1):10-21. [8] 张勇斌.并联混合动力汽车控制策略的分析与研究[J].小型内燃机与车辆技术,2016,45(5):74-77. [9] 王慧晶,王磊,高强,等.混合动力汽车控制策略研究[J].车辆与动力技术,2015(2):12-15. [10] 龚贤武,吴德军,高闯,等.混联型混合动力汽车建模及控制策略研究[J].郑州大学学报(工学版),2014,35(3):73-77. [11] 夏超英,杜智明.丰田PRIUS混合动力汽车能量优化管理策略仿真分析[J].吉林大学学报(工学版),2017,47(2):373-383. [12] POURSAMAD A,MONTAZERI M. Design of genetic-fuzzy control strategy for parallel hybrid electric vehicles[J]. Control Engineering Practice,2008,16:864-866. [13] WANG Yunlong, ZHANG Hongtian. Control Strategy of Energy Flow for High Degree of Hybridization Combined Hybrid System[J]. The International Conference on Remote Sensing Environment and Transportation Engineering,2011,6:3954-3957. [14] 熊华胜,曹桂军,卢兰光,等.城市客车串联式混合动力仿真系统及其应用[J] .系统仿真学报,2010,22(5):1134-1138. [15] 孙育华,王云龙,张艳艳.混合动力系统加速工况能量流控制策略[J].黑龙江工程学院学报(自然科学版),2013,27(4):47-50. [16] 孙远涛,王亮,石伟,等.混联式混合动力汽车动力系统参数匹配的研究[J].黑龙江工程学院学报(自然科学版),2014,28(6):21-28. Research on reverse mode control strategy of the hybrid electric system WANG Yunlong, ZHANG Hongtian,SUN Yuantao,ZHANG Jinzhu (College of Automobile and Traffic Engineering,Heilongjiang Institute of Technology, Harbin 150050,China) The brain is controller of the hybrid electric system for the vechicle, bear important task of coordinating and controlling efficient work of the hybrid electric system, and the control strategy is meridian of protecting the normal work of the brain which is also the core part of the vehicle controller. This paper tests the various driving cycle for hybrid electric vehicle, reversely researches control strategy of the hybrid electric system, and analyzes control strategy in the various driving cycle, in order to develop the controller of hybrid power system. The result indicates that the new controller can efficiently work with each part of the hybrid electric system, and the fuel and emission of the vehicle are all improved. hybrid electric system;controller;driving cycle;control strategy [责任编辑:郝丽英] U467.1 A 1671-4679(2017)05-0001-05 2017-04-11 黑龙江省自然科学基金面上项目(E201327);哈尔滨市杰出青年科学基金项目(2016RQYXJ019);黑龙江省高校青年学术骨干支持计划(1252G051) 王云龙(1978-),男,副教授,博士,研究方向:混合动力系统控制技术. 10.19352/j.cnki.issn1671-4679.2017.05.0013 模糊控制器设计
4 结束语
猜你喜欢
煤气与热力(2021年12期)2022-01-19装备制造技术(2020年2期)2020-12-14山东冶金(2019年3期)2019-07-10消费导刊(2018年10期)2018-08-20凿岩机械气动工具(2017年3期)2017-11-22山东工业技术(2016年15期)2016-12-01电子产品可靠性与环境试验(2016年6期)2016-05-17通信电源技术(2016年1期)2016-04-16中国机械工程(2015年13期)2015-12-16筑路机械与施工机械化(2014年4期)2014-03-01