
地震应急无人机影像处理软件对比研究
2017-10-21 05:49贺专
中国应急救援 2017年5期
贺 专
地震应急无人机影像处理软件对比研究
贺 专
相比于传统的航摄软件的庞大,针对于无人机的智能化、轻量化影像处理软件的发展十分迅速,不需要专业知识也能操作,方便了它们的行业应用。本文选取了三款常用软件Pix4d、Photoscan、Smart3d进行评价,以大疆精灵3获取的1个架次209张照片作为实验数据,从处理流程、耗时、正射影像图、三维模型等方面对这三款软件进行对比研究。研究表明在耗时方面,从低到高依次是Pix4d、Photoscan、Smart3d;在生成正射影像图方面适合用Pix4d、Photoscan;在生成三维模型方面适合用Smart3d。
Pix4d Photoscan Smart3d 地震 无人机
1 引言
无人机在地震应急遥感中发挥着越来越重要的作用。地震发生后,需要快速地获取灾情信息,传统的卫星遥感手段的机动性可能不如无人机。无人机到达目的地以后,能快速展开和起飞作业,且能在云层以下拍摄,获取的影像清晰无遮挡、分辨率较高。在无人机影像后期处理软件的帮助下,不但能获取到灾区的正射影像图,而且可以对灾区进行三维建模,因此在道路勘察、滑坡和堰塞湖监测、房屋损失评估等方面具有很大的应用前景。近年来,以大疆为代表的民用无人机市场的爆发,加快了无人机的智能化进程,操作简单、成本低、便于携带等优势更是加快了无人机在地震应急行业中的应用。
适用于无人机影像处理软件的发展也十分迅速。相较于以往一些庞大的、繁杂的、需要专业知识的遥感影像处理软件,如今市面上已经出现一批专门针对无人机影像处理的商用软件,诸如Pix4d、Photoscan、Smart3d等。 这 些软件智能化程度高,人工干预少,不需要相关专业知识就能操作,甚至不需要地面控制点,也能产出有效的成果。
三款软件各有优势,本文通过选取同一组测区数据,使用它们进行处理,然后从正射影像图、三维模型、耗时等方面对它们进行对比研究。
2 测区数据
测区选在国家地震紧急救援训练基地,位于北京西郊凤凰岭。基地是国家和省级地震灾害紧急救援队进行专业技能训练的场地,拥有馅饼状倒塌建筑、斜楼等多种地震模拟废墟,适合进行此次地震应急航拍工作。

表1 无人机参数表
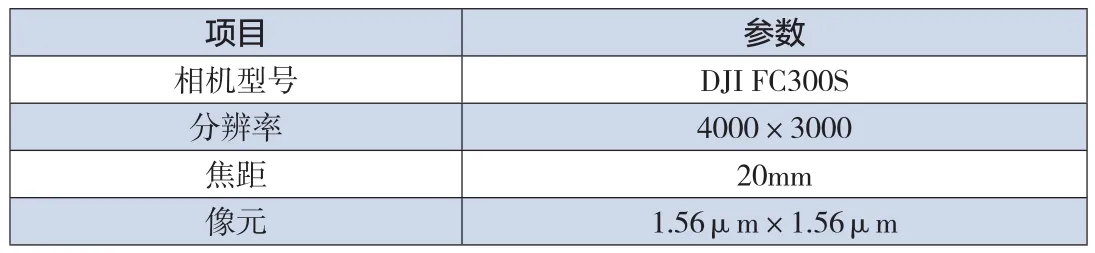
表2 相机参数表
采用的机型为大疆精灵3(DJI Phantom 3 Advanced),电池续航时间约23分钟,最大飞行速度16m/s。搭载的相机型号为DJI FC300S,焦长3.61mm(35mm等效焦距20mm),图像尺寸4000×3000,像元大小1.56μm。
适用于大疆的自主航线规划及飞行的免费软件有Altizure、DJI GS Pro等,可安装在Ipad上运行。本试验采用Altizure,只需轻点屏幕划定飞行区域、设置航高、重叠率、相机等参数后,就能智能规划飞行航线,控制无人机自动起飞并执行航拍任务。
本次试验航向重叠率为86%,旁向重叠率为76%,相对航高为108m。合适的飞行计划能避免疏漏,为了达到更精细的三维建模,重叠率可以适当提高。现场获取完数据后,可以对数据进行重叠度的快速检测,若不满足要求,则要重新采集或者补点。
试验总共获得209张照片,照片的EXIF元数据中包含有GPS标签(经度、纬度、高程),软件会自动读取并作为三维建模的依据。影像数据集相关的信息如表3所示。为模拟地震应急航拍场景,不设置地面控制点(GCP)。
三款软件使用同一个工作站进行影像处理,使用GPU(图形处理器)能加快图形计算处理,工作站的参数如表4。
3 处理流程
3.1 Pix4d
Pix4d是一家瑞士公司的软件,它的最大特点是一键处理,无需人工干预,可全自动地生成结果。内置相机参数数据库,能从照片EXIF中自动识别出对应的相机参数(相机型号、像主点、焦距等),且支持不同架次、不同相机的数据同时处理。输入只需要照片和GPS坐标即可拼图,甚至无pos坐标也能出结果,可不加地面控制点(GCP)。在初始化处理中,Pix4d可自动进行空三、区域网平差和相机检校,有高精度处理和快速处理两种模式可供选择,在快速处理模式下,几分钟内即可生成精度报告,可评估原始影像的质量、预览正射图结果和DEM结果,特别有利于快速检查应急测区是否完全覆盖、重叠度是否符合要求。Pix4d支持GPU加速,在“选项”-“资源”里勾选所有内存、CPU、GPU即可达到最大处理性能。经过点云加密后,可生成高精度的正射影像图和数字表面模型DSM。最后还能使用镶嵌图编辑器修改正射影像图。

表3 影像数据集

表4 工作站参数表

图1 Altizure航线规划

图2 航迹&航拍点
3.2 Photoscan
Photoscan是俄罗斯Agisoft公司的一款基于影像自动生成高质量三维模型的软件,它采用SFM(Structure Form Motion)算法,无需地面控制点,只要导入照片及对应的GPS信息即可。若无GPS信息也能进行处理。它的处理过程也是自动化的,自动对齐照片,生成密集点云、网格、纹理,只不过执行每一个步骤之前需要稍微进行一些参数的设置。Photoscan最后的正射图没有镶嵌修改功能。开始处理前可在“工具”-“偏好设置”-“OpenCL”中勾选启用GPU。
3.3 Smart3d
Smart3d是法国公司的一款软件产品,它基于图形运算单元(GPU)进行三维场景运算,能从简单连续影像中运算生成超高密度点云,并在真实影像纹理的基础上生成高分辨率的三维模型。不同于前两款软件,Smart3d是要先生成三维模型,然后才能生成正射影像图。为了更精细地建模,Smart3d要求航向重叠率为80%以上、旁向重叠率为50%以上。

表5 Pix4d处理流程和参数设置

表6 Photoscan处理流程和参数设置

表7 Smart3d处理流程和参数设置
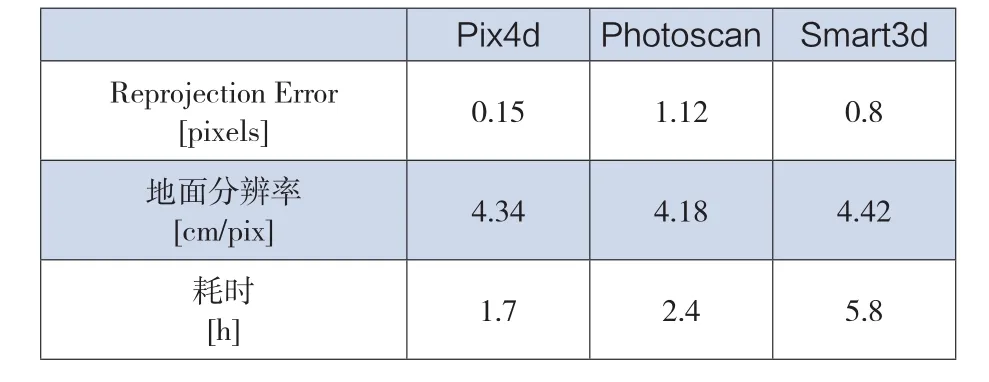
表8 质量精度报告参数对比
4 结果对比分析
从三款软件的质量精度报告中提取有关参数对比如表8所示。第一项重投影误差(Reprojection error)越小,精度越高。地面分辨率越高,影像越清晰。耗时是按完整生成正射影像图和三维模型的全部时间来计算的(此实验在一台机子上运行,实际中可以通过拆分任务,或使用同一局域网的多台机子集群运行,以加快处理速度)。
由表8可看出Pix4d误差最小、分辨率较高、出图最快;Photoscan分辨率高,可误差较大,出图速度仅次于Pix4d;Smart3d误差尚可,地面分辨率尚可,但耗时最久,不利于地震应急快速产出正射影像图,但它的优势主要体现在三维建模。
三款软件产出的正射影像图对比如下:
正射影像图对比结果:Pix4d出图快、误差小、效果好;Photoscan图的四周区域间杂有黑色圆形缺块;Smart3d生成的正射影像图是多个分块了的文件,需另外使用ArcGIS进行拼接镶嵌形成一整张的大图。

图3(a) Pix4d正射影像图

图3(b) Photoscan正射影像图

图3(c) Smart3d正射影像图
正射影像图局部对比如下:

图4(a) Pix4d正射图局部

图4(b) Photoscan正射图局部

图4(c) Smart3d正射图局部
正射影像图局部对比结果∶Pix4d在屋顶边沿处会有拉花,这是由于边沿处有高程落差,若三维计算量少的话,细节显现不出,后期可用Pix4d自带的镶嵌图编辑器进行修改完善;Photoscan在屋顶边沿处有水纹状的过渡,效果要好一些,后期不带镶嵌修改功能;Smart3d是匀色了的,屋顶边沿也有水纹状的过渡,效果尚可。
三维模型对比如下:

图5(a) Pix4d三维模型

图5(b) Photoscan三维模型

图5(c) Smart3d三维模型
三维模型对比结果:由于此次试验数据采用的是单镜头单趟拍摄,没有采用倾斜摄影,所以房屋侧面信息不足。其中,Pix4d三维效果尚可,可是缺少侧面结构,有纹理空洞;Photoscan三维效果较为清晰,可同样缺少侧面结构,有纹理扭曲,个别地方变形严重;Smart3d三维效果最好,轮廓清晰、局部纹理精细。
三维局部对比如下:

图6(a) Pix4d三维局部

图6(b) Photoscan三维局部
由三维局部图对比可得出,Pix4d三维表现尚可,楼梯无变形、右侧墙纹理有空洞;Photoscan三维建模楼梯有变形扭曲、右侧墙纹理不够精确;Smart3d三维表现最好,楼梯无变形、右侧墙纹理清晰。

图6(c) Smart3d三维局部
5 结论
本文以国家地震紧急救援训练基地的大疆无人机影像为例,对Pix4d、Photoscan、Smart3d三款软件进行了数据处理实验,从处理流程、成果质量、耗时、正射影像图、三维模型等方面对实验结果进行了分析,分析结果表明:
(1)三款软件都具有完整的无人机影像处理功能,成果质量均能满足地震应急所需;耗时从低到高依次是Pix4d、Photoscan、Smart3d;软件操作的步骤大部分具有较高的自动化水平,甚至在所有设置都为默认的情况下,Pix4d能一键处理。Photoscan设置可选多一些,方便进行精度控制。
(2)对于正射影像图,建议采用Pix4d和Photoscan,耗时较短,能快速获取大面积的地震灾情影像图。尤其是Pix4d额外还具有快速拼图的功能。
(3)对于三维模型,建议采用Smart3d,建模精细,有利于进行房屋受损、山体滑坡等评估工作。Smart3d三维建模纹理精细、无变形;Pix4d三维表现尚可,纹理有缺失、无变形;Photoscan纹理有缺失、有变形。
作者单位:中国地震应急搜救中心
[1] John W. Gross. A Statistical Examination of Image Stitching Software Packages For Use With Unmanned Aerial Systems[J]. Photogrammetric Engineering & Remote Sensing,2016,06:419-425.
[2] T. Kraft, M. Geßner, H. Meißner, M. Cramer, M. Gerke, H. J. Przybilla. EVALUATION OF A METRIC CAMERA SYSTEM TAILORED FOR HIGH PRECISION UAV APPLICATIONS[J]. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences,2016,XLI-B1.
[3] 谢梓威,范冲,张云生. 一种结合纹理择优算法的影像三维重建方法[J]. 测绘科学,2017,(01):101-106.
[4] 孟鸣,李靖琳,沈玉成. 一种高效快速建立地物三维模型的方法——以大疆无人机和Pix4D软件实现[J]. 云南地理环境研究,2016,(04):1-7.
[5]王旭东,段福洲,屈新原,李丹,余攀锋. 面向对象和SVM结合的无人机数据建筑物提取[J]. 国土资源遥感,2017,(01):97-103.
[6]曹帅帅,米鸿燕,杨润江. 基于无人机技术的水利工程应用探讨[J]. 浙江农业科学,2017,(03):511-513.
[7]陈荻,李卫正,孔文丽,申世广. 基于低空高分辨影像的三维绿量计算方法——以南京林业大学校园为例[J]. 中国园林,2015,(09):22-26.
猜你喜欢
泉州师范学院学报(2021年6期)2022-01-07
中华书画家(2021年12期)2022-01-06
宁波大学学报(人文科学版)(2021年4期)2021-07-07
软件(2020年3期)2020-04-20
制造技术与机床(2019年4期)2019-04-04
摄影之友(影像视觉)(2018年12期)2019-01-28
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
Coco薇(2017年8期)2017-08-03
东方艺术·国画(2016年3期)2017-02-08
发明与创新(2016年38期)2016-08-22
