基于微电子机械加速度传感器的腹腔镜训练评价系统
2017-10-20 05:38:46徐明哲王殊轶孙昌英
生物医学工程研究 2017年2期
徐明哲,王殊轶,孙昌英
(上海理工大学 医疗器械与食品学院,上海 200093)
1 引 言
腹腔镜手术相较于传统外科手术具有创伤小、术后疼痛轻、住院时间短、美容效果好等特点,因此普及化程度越来越高。但其与传统的开放手术相比,医生在操作技巧上有明显的区别,腹腔镜手术区别于传统手术的特点有:(1)二维的空间观念感;(2)熟练掌握腹腔镜器械;(3)腹腔镜下解剖的识别能力;(4)双手的协调性。由此可见其技术难度大,学习曲线长,培养方式与传统外科医师的培养也有所不同,所以对医师进行腹腔镜手术技能培训非常有必要[1-2]。研究发现,腹腔镜医生的手术培训效果、手术经验与腹腔镜手术并发症的发生有着密切的关系[3-4]。国外的一些大学和研究机构针对这一现象开发出了腹腔镜手术客观评价系统,通过采集培训者在腹腔镜培训中一系列的运动参数,对培训者的操作完成评价[5-7],如Varas等[8]通过2名资深腹腔镜医师对培训者的录像过程中的行为进行分析,根据操作时间、手运动的路径及错误率等指标进行腹腔镜培训效果评分。Aggarwal等[9]利用两名打分人员通过视频录像对操作者下针的位置、针的运动轨迹、打结的技巧等方面来评价操作者的培训绩效。荷兰代尔夫特理工大学人机系统组开发了一款TrEndo机械式手术追踪系统,该系统由一个万向节和三个光学传感器组成的能检测到四个自由度的微创手术追踪系统, 传感器检测器械平移的精度为0.06 mm,器械沿自身轴线转动的角度精度为1.27°,器械围绕微创伤口转动的最小角度为0.23°。TrEndo系统的准确度高于95%,是一款优良的客观评价系统,但造价也极其昂贵[10-11]。
在国内研究领域中,目前只有主观评价模式,而基于客观指标对于腹腔镜操作技能的评估,国内尚无研究。如国内鲁欣等[12]采样实时考核两种考核方式对受训者的培训结果,其过程较费时、耗人力,只适用于受试者不多的技能评估。
目前由于传统腹腔镜培训评价体系耗时、耗力和国外培训评价系统昂贵的价格限制,绝大多数综合医院的年轻医师得不到有效的腹腔镜手术培训机会。为了有效缓解这一问题,本研究开发设计了基于微电子机械(micro electronic mechanical system,MEMS)加速度传感器的腹腔镜手术训练评价系统,采取卡尔曼滤波算法对获得的测量数据进行处理,减少环境噪声的影响,并使用欧拉角算法,引入陀螺仪数据用于消除重力加速度对各个轴分量的影响,得到器械的三轴运动加速度,使用软件编程实现了腹腔镜手术培训任务评价系统,测量指标包括:操作时间、平均速度、器械运动平滑性、器械空闲率,实现了腹腔镜训练过程中对器械评价指标数据的采集、分析和保存,并使用培训箱进行了训练任务测试,验证系统的有效性。
2 系统的评价指标及其实现
2.1 评价指标
我们所设计的腹腔镜训练评价系统主要采集培训过程中手术器械的运动参数,通过分析相应的指标评价测试者的培训过程,提供培训建议,提高培训效果。
本研究所选择的操作评价指标为:(1)操作时间:以秒为单位,描述操作过程的总时间(不论任务完成与否)。(2)平均速度:以厘米每秒为单位,描述器械尖端在操作过程中的平均速度。(3)运动平滑性:为加速度的变化率,用以描述操作过程器械运动的平稳程度。(4)空闲率:任务过程中器械无运动时间与操作时间的比例。
这些评价指标中,完成时间、移动距离、平均速度和运动平稳度实现对操作者任务完成效率进行评价;空闲率和学习曲线可以对操作者的任务完成效率进行评价,综合上述指标可以对培训者进行指导,提高培训效率。
本研究设计了MEMS加速度传感器模块(采样频率100 Hz)[13-14],独立获取原始数据,经过软件使用不同的公式得到评价参数。
使用Micron Tracker双目视觉系统获得的器械三维坐标数据计算任务完成时间、器械尖端总位移长度、空闲率指标,使用MEMS加速度传感器获得的数据经过积分和微分分别得到器械的速度和运动平稳度指标,经过软件处理平台,完成由原始数据到指标的计算和数据保存,并导出培训完成情况报告,见图1。
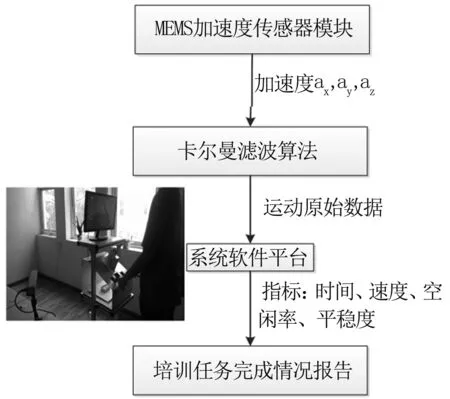
图1系统设计框图
Fig1Systemconfigurationblockdiagram
2.2 指标获取
2.2.1硬件平台 基于意法半导体公司生产的iNEMO惯性传感器模块LSM330DLC,本研究设计并制作了MEMS加速度传感器测量模块。
由于测量过程中,传感器数据容易受到环境变化的影响,会有大量的噪声进入传感器输出数据,而且噪声的频率和运动参数频率混叠,因此本研究应用信号融合的方法,提高数据精度[15]。采用卡尔曼滤波算法对输出数据进行时域滤波,采用欧拉角算法实时计算传感器的位置,消除固有的重力加速度在各轴上的分量[16-20]。其原始数据处理流程图见图2。
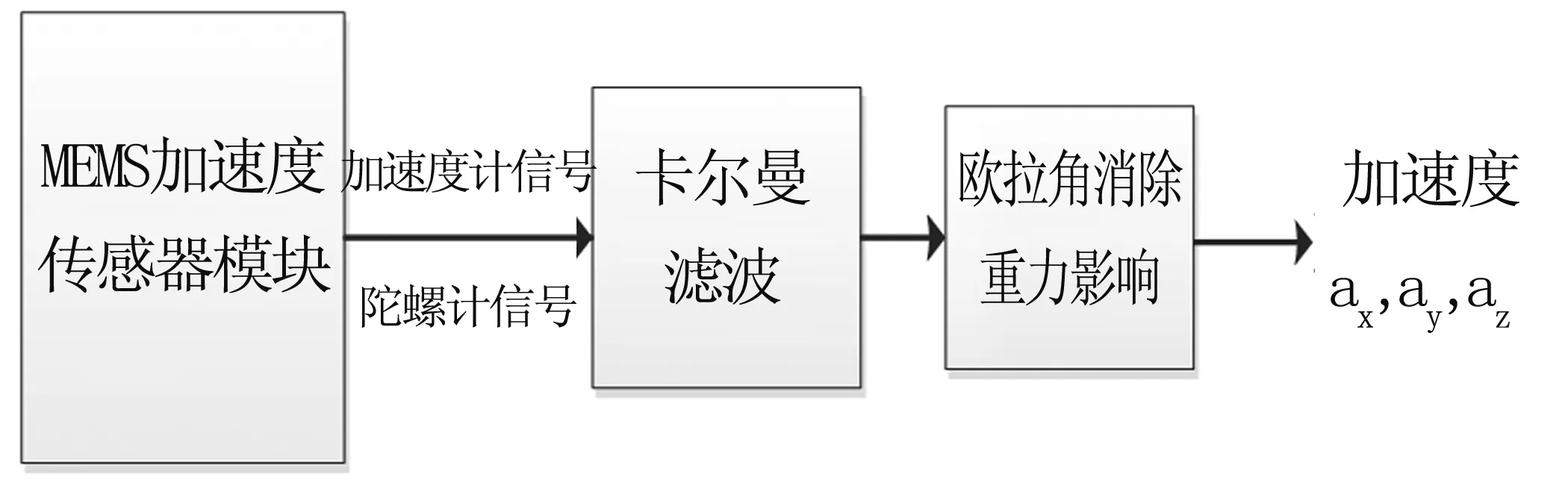
图2 MEMS模块实现流程图
Fig2MEMSmoduleimplementationflowchart
2.2.2加速度传感器模块标定 MEMS加速度传感器焊接到印制电路板上时会受到外部应力,这样会影响传感器的敏感度和零点输出,因此需要对传感器进行标定。
(1)量程标定
将焊接好的传感器Z轴放置于水平位置,当传感器Z轴输出稳定时,再将传感器翻转180°(Z轴另外一个方向水平放置),等待传感器输出稳定。这样就相当于±1 g的加速度被加载到Z轴上,将稳定读数的较大值减去较小值,然后除以2就得到传感器的实际敏感度,Y轴和X轴也按照上述过程进行标定。由于焊接好的传感器敏感度随时间和温度变化很小,所以只需要标定一次即可[15]。
(2)零点标定
零点标定是指在传感器某一轴上加载0 g的固定输入时,测量值偏离加速度敏感标定中点的程度,零点输出会随着焊接应力和超出测量范围的外部机械应力产生轻微的变化,因此,在每次使用前都应该进行零点标定消除影响。
(3)卡尔曼滤波算法实现及验证
卡尔曼滤波分为两部分:时间更新与测量更新。随着时间更新方程和测量更新方程的计算,系统状态的估计被重复进行着: 前一次的后验估计被用于预测下一时刻的先验估计,见图3。
本研究采集一段MEMS加速度传感器的运动过程,通过串口上传到PC并保存,见图4,经过卡尔曼滤波之后的数据平滑很多,滤波算法效果达到了预期目标。
(4)欧拉角算法实现

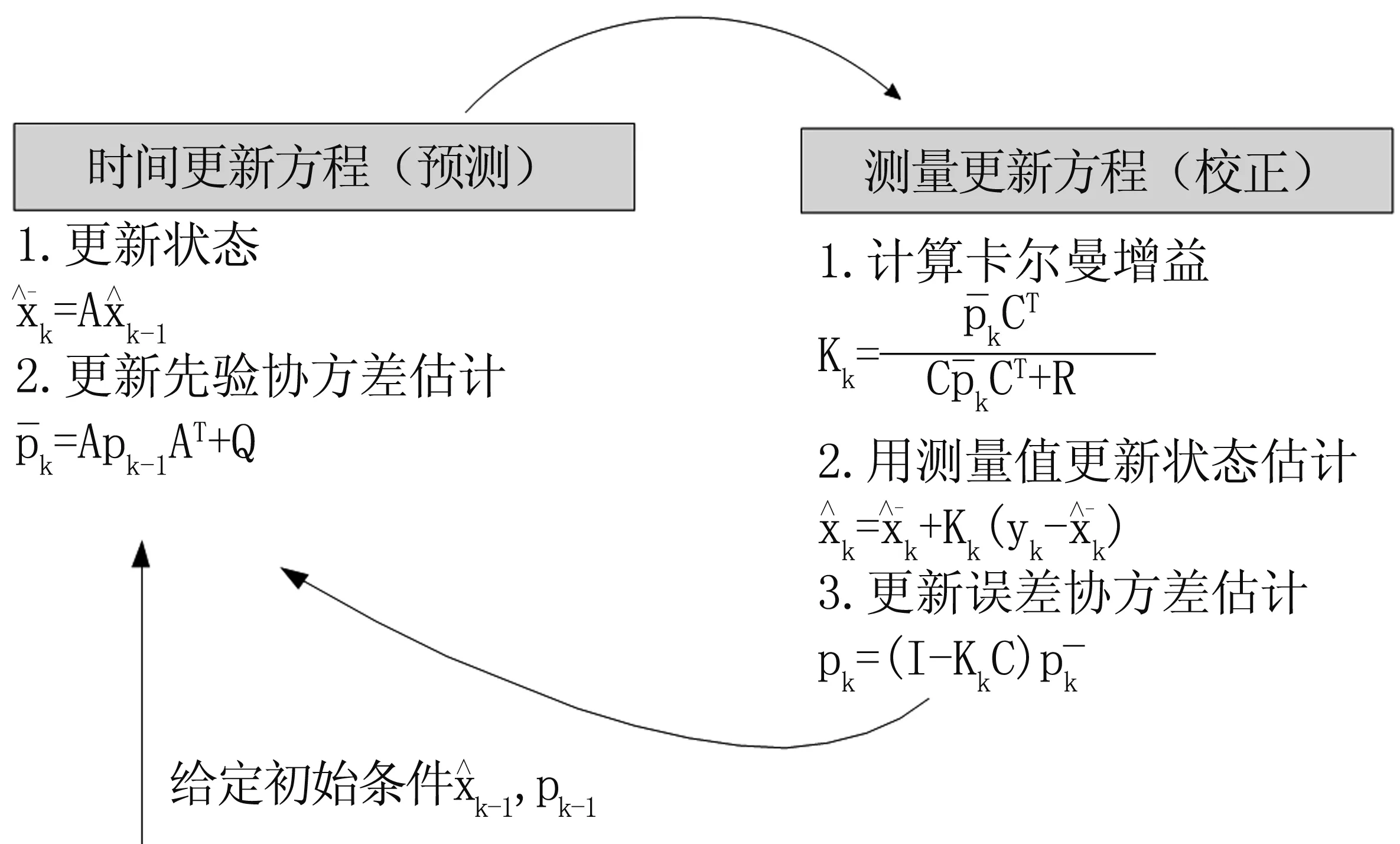
图3 预测和校正方程关系图

图4 滤波数据对比图
Fig4Filterdatacontrastfigure
其中,θ、Ψ和φ分别表示陀螺仪测得的目标物体绕x、y、z轴的旋转角度。当陀螺仪的采样速度很高时,由于采样时间间隔很小,因此,可以认为目标物体沿各个轴向的转动角度即为陀螺仪测得的各个轴向转动角度。为了满足本研究所设计系统的实时测量要求,采用Ck和Ck+1分别表示目标物体第k次和第k+1次采样时刻测得的转移矩阵,因此,我们可使用以下公式:
Ck+1=CkAk
(1)
(2)
(3)
(4)
σx、σy、σz分别表示在间隔时间内x、y、z三个方向的陀螺仪所测得的转动角度。通过上述变换,就把计算k+1次转移矩阵变化的任务变成了只需要计算从k次到k+1次之间转移矩阵的一次变化的任务,然后通过递推可以实时的更新转移矩阵。
2.2.3软件平台 使用LabVIEW编写系统软件,其中各个模块的实现过程如下文所述。
(1)操作时间:以秒为单位描述操作过程的总时间(不论任务完成与否)。
(5)
(2)平均速度:以厘米每秒为单位描述器械尖端在操作过程中的平均速度。
(6)
其中ax、ay、az分别表示MEMS加速度传感器模块测得的器械沿传感器三个轴的加速度值。
(3)运动平滑性:为加速度的变化率,用以描述操作过程器械运动的平稳程度。
(7)
(4)空闲率:任务过程中器械无运动时间与操作时间的比例。其中Tf表示器械运动加速度模值小于0.01g的时间。
(8)
3 左右移环任务测试验证
3.1 测试流程
测试招募身体健康的在校女大学生一名,年龄25周岁,右利手,在进行培训评价之前无腹腔镜手术经验,经过一定时间的视频培训,以使受训者掌握模拟腹腔镜手术器械训练过程。本次培训选择左右移环任务,左右移环任务为腹腔镜培训的基础操作[21]。此次测试中培训者需要完成十次训练,每次中间间隔15 min,让受训者肌肉得到休息。训练选用的腹腔镜模拟训练箱是由瑞红实验室设备有限公司生产的200E型腹腔镜模拟训练箱,训练器层可调节高度至合适位置,选取两把抓钳和一把持针器作为本次培训的器械。测试人员与仪器见图5。
3.2 测试数据分析
资料显示,目前对腹腔镜训练评价指标参数并无统一标准[12],本实验测试人员实验前无任何腹腔镜手术经验,属于腹腔镜培训过程的学习期,因此其分析范围定位在腹腔镜学习技能上升期,不涉及技术成熟期阶段。
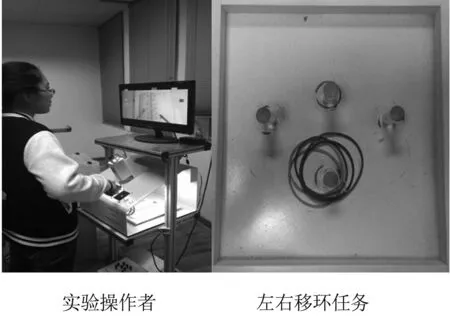
图5 测试人员与仪器
左右移环任务可以训练操作者的手眼协调能力和双手配合能力。与开腹手术相比,腹腔镜手术对手术时间要求更为严格,这就要求操作者需要在尽可能短的时间内完成操作,并且任务操作时间已被证明是一个很重要的客观评价指标之一[22]。如图6所示,操作时间呈下降趋势,第10次操作时间相较第1次减少32%。
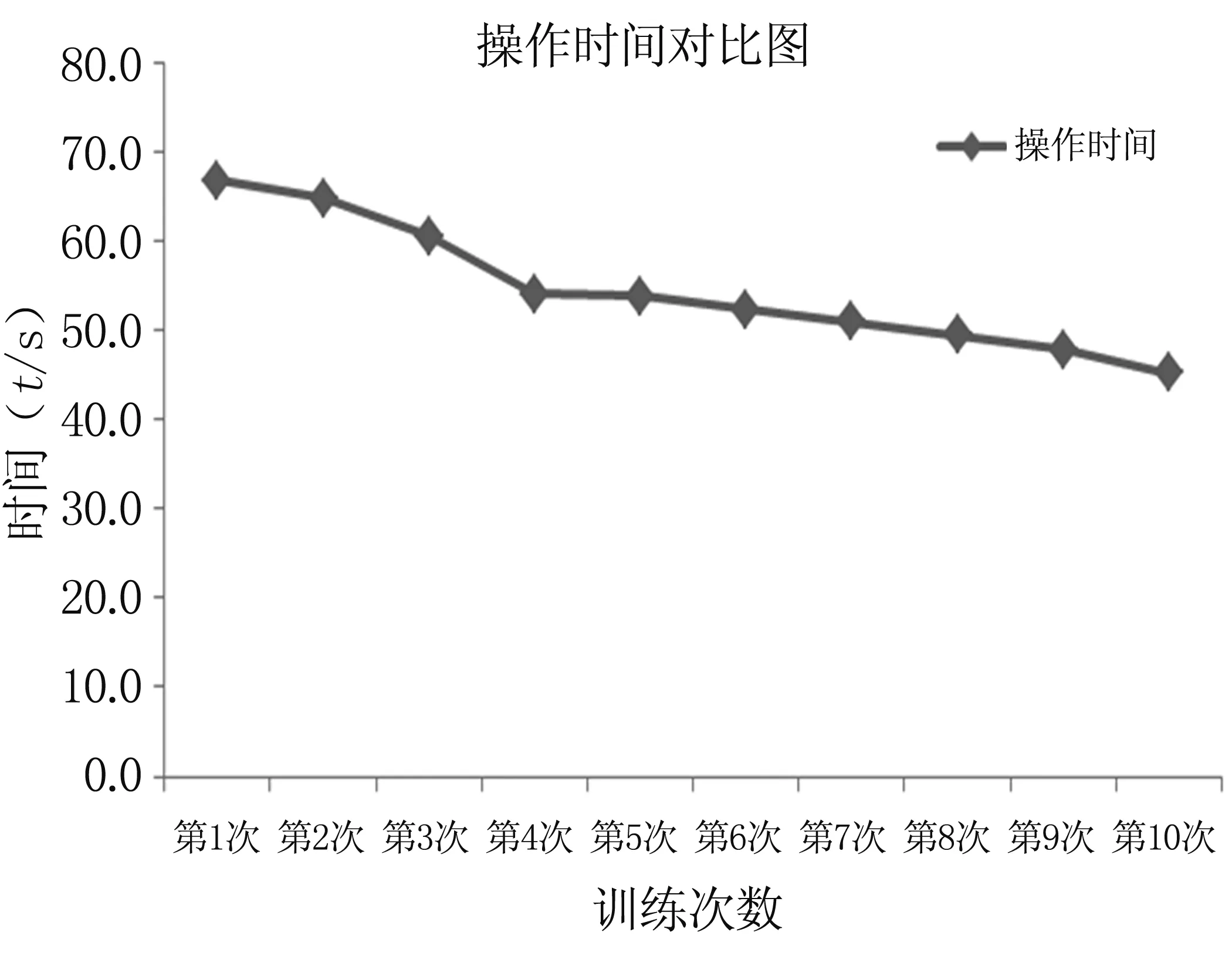
图6 操作时间对比图
传统二维腹腔镜系统降低了视觉的距离感觉从而导致器械的移动速度减慢。器械移动的速度直接反应操作者的技术熟练程度[23]。任务过程中的速度常用于评价腹腔镜手术操作技能,器械尖端的速度更是个精确的客观指标。当操作者对任务的操作过程越来越熟悉时,器械所走过的总路径长度会减少,操作时间也会变短,所以操作过程中的平均速度会减小,见图7。通过训练,第10次较第1次左右手的操作平均速度分别降低45%和32%。
空闲率是指任务过程中器械无运动时间与操作时间的百分比。初学者与有经验的操作者在操作缝合任务和更复杂的任务时,空闲率有着显著性差异[24]。当操作时间缩短、操作平均速度减小时,空闲率减小,见图8,第10次比第1次降低53%。

图7速度对比图
Fig7Velocitycontrastfigure
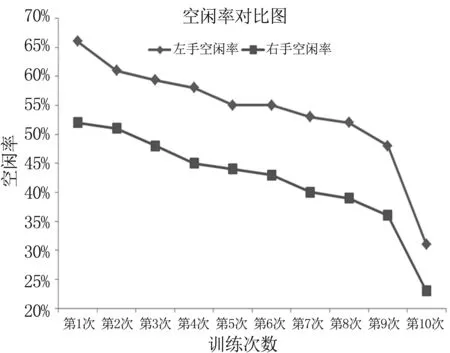
图8 空闲率对比图
运动的平稳度可通过器械加速度的变化率来体现,可精确地反映出操作者技能的熟练程度。通过训练,左右手平稳度分别提高15%和19%,见图9。
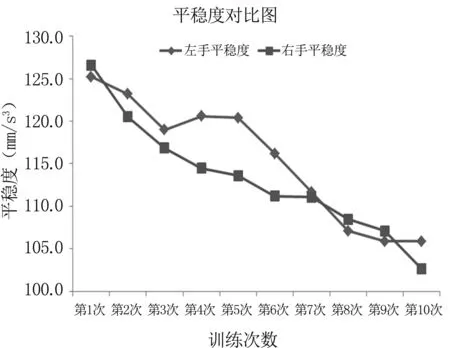
图9 平稳度对比图
通过对左右移环中左右手参数进行对比,发现右手数据在路径对比与速度对比中均明显高于左手,在完成任务的过程中,右手操作占据主导地位。分析发现经过第6次训练后,左右手协调能力明显提高。任务培训的目标之一就是提高培训者的左右手协调程度,因此,在后续的研究中可以将左右手空闲率的时间分布做比较,消除两手同时静止时对数据的影响。
通过对每项实验的各项参数对比分析可知,随着训练次数的增加,操作者越来越熟悉实验任务流程,各项参数均随实验次数的增加而下降,其下降趋势与学习曲线比较相似。当训练者达到一定的熟练程度之后,各项参数趋于平稳,学校效率降低,通常建议训练者间隔一段时间之后再进行培训。
4 结论与讨论
腹腔镜手术的广泛应用对培训的要求越来越高,现有的人力资源已经不能满足传统的专家式培训评价体系,因此,本研究设计了广泛适用于训练箱或虚拟现实培训系统的评价系统,本系统自动采集培训者培训过程中器械的运动参数进行分析,对训练者培训后及时反馈情况,减少了对专家的依赖。
本研究开发设计了MEMS加速度传感器模块用于采集器械的运动加速度数据,模块具有体积小、使用方便等特点;传感器由于容易受到外部环境的影响,测量得到的数据中往往夹杂有噪声,并且噪声的频率和人体运动频率混叠,本研究采用了卡尔曼滤波算法处理数据;并建立了软件平台对采集数据进行处理、分析,可定量给出培训者每次训练后四大指标增减率,并使用培训箱进行了训练任务测试,验证了系统的有效性。
本研究仍有不足之处:在实验验证过程中,未找到合适的专家来进行操作,以形成以后培训者的对比标准;本课题所设计的系统未能完成培训数据的数据管理、存储与对比分析。
在以后的研究中,可以设计实现基于MEMS加速度传感器模块的三维坐标追踪算法并与双目视觉追踪系统配合使用,提高其测量精度;完成测量数据与PC的无线传输,实现数据的运动指标的实时计算和分析,完成对培训过程的实时指导;形成双目数据追踪系统网络,扩大其测量空间范围;实现训练者培训数据的数据库存储与管理。
猜你喜欢
腹腔镜外科杂志(2022年7期)2022-08-16 04:31:06
当代水产(2022年6期)2022-06-29 01:12:20
汽车观察(2018年12期)2018-12-26 01:05:42
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
中国内镜杂志(2017年2期)2017-03-20 16:18:12
腹腔镜外科杂志(2016年11期)2016-06-01 12:10:09
腹腔镜外科杂志(2016年9期)2016-06-01 12:10:07
淮海医药(2015年1期)2016-01-12 04:33:11
今日教育·幼教金刊(2015年10期)2015-11-28 01:27:19