
海空目标航迹关联算法研究
2017-10-19 05:47:49董亚卓
计算机时代 2017年10期
刘 帅,杨 松,常 歌,董亚卓
(1.海军91655部队,北京 100036;2.海军92196部队)
海空目标航迹关联算法研究
刘 帅1,2,杨 松1,常 歌1,董亚卓1
(1.海军91655部队,北京 100036;2.海军92196部队)
介绍了航迹关联的概念与意义,归纳总结了航迹关联能够解决的问题以及面临的困难。研究海空目标航迹关联算法有利于实现航迹关联工作的自动化,提高工作效率和准确率。通过拉格朗日插值法对真值航迹进行插值,获得足够多的时标一致的融合航迹与真值航迹对应的航迹点,计算对应航迹点之间的距离,与给定阈值相比较,判断其对应关系,进而实现自动化的航迹关联。这一过程经总结梳理,进而提出了航迹关联算法,以实现航迹关联的自动化,提升航迹关联的准确率和效率。
海空目标航迹;航迹关联;算法;插值
0 引言
航迹关联即为判断来源不同的两条航迹是否代表同一目标[1-3],本文所述航迹关联是为进行观察预警装备效能评估而开展的目标融合航迹与目标真值航迹之间的关联。观察预警装备演习评估中各综合处理中心会将获取系统/装备采集的目标航迹信息融合,得到目标融合航迹,各空中/海上平台上部署的北斗/GPS记录装备会记录平台的真实位置信息,只有将目标融合航迹与真值航迹对应起来,才能根据真值航迹计算目标融合航迹的目标跟踪效能,定位效能等相关指标,因此航迹关联是开展装备效能评估的必要环节。
航迹关联主要解决如下问题:一是通过与目标真值比对,判别信息综合处理中心识别出来的目标航迹是否正确;二是对信息综合处理中心已经发现但并未识别的航迹点,判断是否为对应目标;三是判定信息综合处理中心是否完全未发现该目标。通过综合分析,建立信息综合处理中心探测航迹与目标真值航迹的对应关系,在此对应关系的基础上开展装备效能指标计算。
1 航迹关联面临的困难
当前,观察预警装备效能评估中航迹关联工作主要面临如下三项困难。
一是信息综合处理中心系统探测的航迹数量大,航迹交叉。因海域内目标众多,部署在前沿的不同探测装备会上报同一目标的信息,有些信息能够实现在信息综合处理中心的融合,有些未能有效融合,导致信息综合处理中心目标航迹数量很大,同时,海域内船只的航迹交错复杂,增加了航迹关联的难度。
二是部分航迹过于稀疏。由于装备性能、传输条件、外部环境以及其它方面的原因,导致部分航迹过于稀疏,使得后续计算样本量明显不足,目标融合航迹与真值航迹缺少足够数量的时标一致的航迹点,难以计算足够多的对应航迹点的距离,从而较难判断目标融合航迹与真值航迹的对应关系,即难以进行有效关联。
三是同一目标存在批号反复跳变的情况。在装备对目标的跟踪过程中会出现目标跟踪丢失,一段时间以后又重新起批跟踪,这一过程使得同一目标批号不同,给航迹关联增添了困难。
因为以上三点原因,对海空目标探测航迹和目标真值航迹的融合造成了很大的困难,导致目标航迹融合过程需要将海空目标探测航迹探测出的每一个航迹点与目标真值航迹点进行一一比对,分析融合中心探测出来的目标是否正确,是否有探测到但未识别的目标,是否有交叉跟踪探测错误的目标,是否对目标完全未识别。
2 航迹关联算法设计
为解决当前航迹关联工作中面临的困难,提升航迹关联的准确率与效率,本文设计了海空目标航迹与真值航迹的自动关联算法。算法的主要思想是:针对每一条目标融合航迹,对所有的真值航迹进行插值处理,使得融合航迹与真值航迹具有足够数量的时标一致的航迹点,然后计算对应航迹点之间的距离,若满足设定条件则融合航迹与真值航迹对应,否则两者不对应。算法中对真值航迹的插值处理,获得了大量的时标一致融合航迹点与真值航迹点,保证了计算所需的样本数量,为获得更加准确的计算结果与评估结论奠定了良好的基础。
算法中用到插值法为拉格朗日插值法[4-5],具体过程为:①选取一条目标融合航迹Ai(i=1,2,…,N,N为融合航迹的数量),Ai由t1,t2,t3,…,tn共n(n的值随航迹具有的航迹点数量而变动)个航迹点组成。对于每条由T1,T2,T3,…,Tm(m的值随航迹具有的航迹点数量而变动)个航迹点组成的真值航迹Bj(j=1,2,…,M,M为真值航迹的数量)进行插值。②采用拉格朗日插值法对真值航迹进行插值,得到真值航迹上t1,t2,t3,…,tn时刻的航迹点经纬度值。对于每一个tn,在真值航迹上找到与其最近的Tm-1与Tm,且Tm-1<tn<Tm,则tn时刻真值航迹点的经度位置是xTm-1+(xTm-xTm-1)*(tn-Tm-1)/(Tm-Tm-1),纬度位置是yTm-1+(yTm-yTm-1)*(tn-Tm-1)/(Tm-Tm-1)。
航迹关联算法流程如下。
第一步:令i=1,从第一条融合航迹开始处理。
第二步:令j=1,从第一条真值航迹开始处理。
第三步:判断j是否小于等于M,即判断是否还有真值航迹未被处理。若是则进行第四步,若不是则进行第十六步。
第四步:用拉格朗日插值法对真值航迹Bj进行插值。
第五步:设置距离阈值W,令r=1,即从每条融合航迹的第一个点开始判别;令flag=0,即对应关系表中记录处于未添加状态。
由学校或学校所属资产经营公司投资成立具有酒店经营资质的有限责任公司(以下简称经营公司),学校作为酒店资产的出租方,将酒店出租给经营公司经营管理。学校与经营公司在股权上是投资与被投资的关系,存在实际的控制与被控制的关系;同时在酒店资产管理上又存在出租和承租的关系,但学校与经营公司是两个独立的法人主体,各自以出资额为限承担法律责任。经营公司负责自主经营酒店,酒店日常所有收支由经营公司独立核算,日常经营的过程中所形成的经营收益归公司所有,经营公司以出资额为限承担酒店的经营风险和各项法律责任。
第六步:判断r是否小于等于融合航迹总的航迹点数n,若是则进行第七步,若不是则进行第十三步。
第七步:判断状态表示符flag的值,若为0,即对应关系表中记录处于未添加状态,则进行第八步;若为1,即对应关系表中记录处于添加状态,则进行第十一步。
第八步:判断tr时刻融合航迹上的航迹点到真值航迹相应航迹点的距离Dtr是否小于等于给定的距离阈值W,若是,表示tr时刻两个航迹点相对应,进行第九步;若不是,表示tr时刻两个航迹点不能对应,则进行第十步。
第九步:在对应关系表中添加记录:融合航迹Ai,真值航迹Bj起始时间记为tr。表示tr时刻起融合航迹Ai与真值航迹Bj开始相对应。
第十步:r=r+1,即移至融合航迹的下一个点。返回到第六步,继续对该时刻相应的融合航迹点与真值航迹点进行判断。
第十一步:判断tr时刻融合航迹上的航迹点到真值航迹相应航迹点的距离Dtr是否小于等于给定距离阈值W,若是,表示tr时刻两个航迹点相对应,进行第十步;若不是,表示tr时刻两个航迹点不能对应,进行第十二步。
第十二步:在对应关系表中当前行添加记录:结束时间tr-1。并设置flag=0。然后进行第十步。
第十三步:判断flag的取值,若为1,则进行第十四步;若为0,则进行第十五步。
第十四步:在对应关系表中当前行添加记录:结束时间为tr。并设置flag=0。然后进行第十五步。
第十五步:令j=j+1,即移至下一条真值航迹,继续判断下一条真值航迹与当前融合航迹的对应关系。然后进行第三步。
第十六步:令i=i+1,即移至下一条融合航迹,继续判断下一条融合航迹与所有真值航迹的对应关系。
第十七步:判断i是否小于等于N,即判断是否还有融合航迹未参与计算,若有则转至第二步,若没有则算法结束。
3 试验验证
选取某次红蓝双方实兵对抗演习中某时间段内红方对蓝方的探测数据作为样本对算法进行验证。此次对抗演习中1号舰、2号舰、3号舰、4号舰、5号舰、6号舰、7号舰等水面舰艇属于红方编队,8号舰、9号舰、10号舰、11号舰、12号舰等水面舰艇属于蓝方编队。表1所示为红方对海上目标的整体发现情况。

表1 红方对海上目标的整体发现情况
根据表1中红方识别出的目标机舷号推算的重点海上目标批号对照表如表2所示。
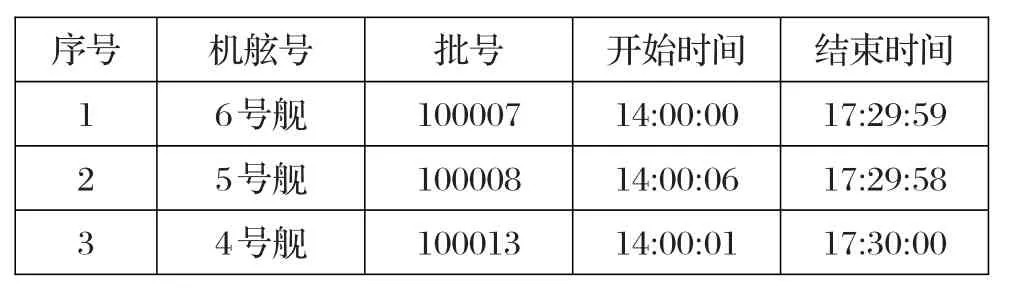
表2 通过机舷号推算的重点海上目标批号对照表
红方综合处理系统识别出了4号舰、5号舰、6号舰,而这三艘舰艇为红方自己的舰艇,即红方综合处理系统仅识别出了部分己方的目标,并没有识别出任何蓝方目标,这样就不能形成红蓝双方的战场综合态势来辅助指挥员的指挥决策,这种结果是不能满足战争需要的。
通过算法对蓝方重点目标进行航迹关联,其结果如表3所示。
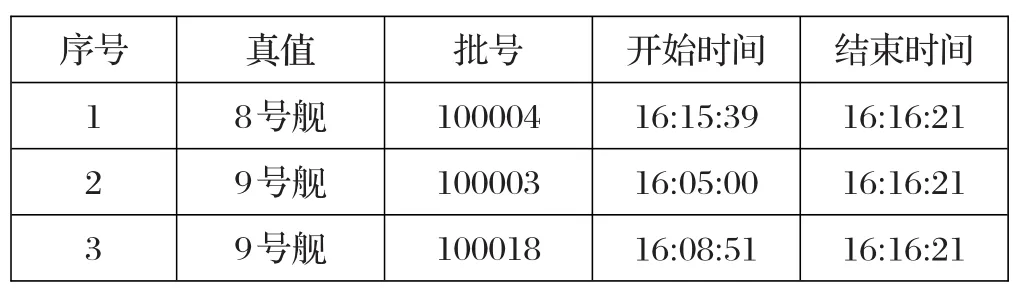
表3 通过算法得到的蓝方重点海上目标批号对照表
由算法得到的蓝方重点海上目标批号对照表,将批号100004识别为8号舰,批号100003和批号100018识别为9号舰,8号舰与9号舰为蓝方舰艇,此时红方综合处理系统识别出了蓝方海上目标,比通过机舷号得到的批号对照表更全面、准确,尤其是具有更高的实际应用价值,能够为红方指挥员提供一定的蓝方目标态势,为指挥员的指挥决策起到辅助作用。
4 结束语
通过算法实现目标航迹的自动关联,能够对海量的航迹数据进行自动处理,减少了人工工作量,同时计算机执行速度快、准确率高,提高了航迹关联的时效性和准确性。在对目标融合航迹与真值航迹进行关联,明确了两者的对应关系后,才可以进行目标定位效能、目标识别效能、目标跟踪效能等相关性能指标的计算,即航迹关联为后续指标计算提供了基础支撑,为效能评估顺利开展提供了支持,同时航迹关联为掌握和检验装备的观察识别目标效果和融合处理能力提供了依据,为装备的不断改进升级奠定了基础。
[1]何友,王国宏,彭应宁等.多传感器信息融合及应用(第二版)[M].电子工业出版社,2007.
[2]王晓岭.数据融合系统中航迹关联和属性融合的研究[D].西安电子科技大学硕士学位论文,2006.
[3]方浩.数据融合系统中航迹关联与融合算法研究[D].沈阳工业大学硕士学位论文,2013.
[4]同济大学数学系.高等数学[M].高等教育出版社,2014.
[5]林秀梅.浅谈拉格朗日插值法的原理及其应用[J].吉林财贸学院学报,1990.
Research on the algorithm of the sea and air target track association
Liu Shuai1,2,Yang Song1,Chang Ge1,Dong Yazhuo1
(1.Navy 91655,Beijing 100036,China;2.Navy 92196)
This paper introduces the concept and significance of track association,summarizes the problems that can be solved by track association and the difficulties that track association are facing.The research of the algorithm of the sea and air target track association is helpful to realize the automation of track association and improve the efficiency and accuracy.The true value track is interpolated by Lagrange interpolation method,and the sufficient coincidence of the fusion track and true value track are obtained.The distances between the corresponding track points are calculated and then compared with a given threshold to determine the corresponding relationship,so as to realize the automation of track association.The track association algorithm is proposed based on this process,which realizes the automation of track association and improves the accuracy and efficiency of track association.
the sea and air target trace;track association;algorithm;interpolation
TP391
A
1006-8228(2017)10-11-03
2017-08-09
刘帅(1989-),男,山东滨州人,硕士研究生,主要研究方向:计算机应用技术。
10.16644/j.cnki.cn33-1094/tp.2017.10.004
猜你喜欢
小学生学习指导·高年级(2023年8期)2023-11-19 05:33:56
作文评点报·小学三、四年级(2018年43期)2018-01-08 08:54:28
民间故事选刊·上(2017年5期)2017-05-17 21:54:25
电子制作(2017年1期)2017-05-17 03:54:35
小小说月刊(2015年5期)2016-01-22 08:39:19
智能系统学报(2015年5期)2015-12-03 05:18:20
微型小说选刊(2015年3期)2015-11-18 07:12:25
浙江大学学报(工学版)(2015年2期)2015-05-30 07:05:04
棋艺(2014年3期)2014-05-29 14:27:14
华北水利水电大学学报(社会科学版)(2011年4期)2011-11-22 08:12:02
