用多力的立体模型分析太极拳的技击功能
2017-10-13 14:45:20李恩杰郭振兴
邯郸学院学报 2017年1期
顾 杰,李恩杰,郭振兴
用多力的立体模型分析太极拳的技击功能
顾 杰,李恩杰,郭振兴
(邯郸学院太极文化学院,河北邯郸 056005)
太极拳的技击功能体现在各个招式中,表现在散打和推手练习中。其发力常常是多力并用,联合出击,形式多样。因此,提出了太极拳立体模型的多力系统理论,编写了双力的计算软件,重点分析了太极拳的双力系统。一个广义力有三个力分量和三个力矩分量。双手的力学模型体现两个广义力的打、化、缠的协作效应。多力立体模型简括了人体和接手的构架、平动和转动、外力等因素,软件可用于定量分析太极拳招式的动静态效应。列举了对太极拳招式“手挥琵琶”“搂膝拗步”的分析。
太极拳;力学;人体模型;失根;打滑;平衡;发力;临界条件
文献[1-4]提出了人体刚体模型,讨论了外力的影响。人体刚体模型可分为平面模型和立体模型。文献[5-6]用立体模型分析了太极拳的单力系统。本文建立了立体模型的多力系统理论,重点分析了太极拳的双力系统。太极推手一般用两手接触对方;可以双手化解;可以一化一发;可以双手发放;可以双手合作拿住对方等等。单手的力学模型在力学上模拟为一个广义力,即一个有三个力分量和三个力矩分量的广义力。广义力体现了打、化、缠的武术效应。双手的力学模型体现了两个广义力的打、化、缠的协作效应。太极拳招式中的左搂膝拗步是左手搂膝化解对方的攻势,右手发掌攻击对方的中路。化发可以略有先后,但一般情况下为同时进行。本文建立的双手力学模型及计算软件可对同类招式进行科学的定量分析。
人体刚体模型可用于对太极拳进行全面和深入的力学分析。立体模型简括了人体的构架、质量、接手质量、整体转动惯量、接手转动惯量、整体运动、接手运动、整体转动、接手转动、攻击力和力矩、重力、地面反力、摩擦力等因素。运用更加精细的运算,分析了转腰胯、翻胯、旋胯、接手螺旋、两手合作等复杂动作的力学原理。两手是指两个接手处,即接触对方的位置,实际上可以是两手、一手一脚、一手一膝、一手一肩、一手一胸、等等。
通过立体模型的太极拳力学分析,得出以下重要结论:
人体的重心要在支撑面内以维持稳定平衡;
打滑和失根是导致人体失控的两种临界条件;
在临界条件内人体平衡,超过其中一个临界条件都将最终导致人体不平衡;攻击力来自脚底的摩擦力、正压力、人体整体的动量和肢体相对运动的动量;内劲造就动量和传递力。
并且通过数学计算,推导出太极拳套招式中保持平衡的临界条件。
本文将立体模型编制成软件,并用软件分析了杨式太极拳的招式手挥琵琶和搂膝拗步。计算出了支撑力源、整体平动、整体转动、相对平动和相对转动对临界广义力的影响。
一、和太极拳有关的几个力学因素
太极拳是武术的一个拳种,具有独特的技击功能和巧妙的攻击能力。太极拳的攻击力来源于三个方面:
一是脚与大地的接触。太极拳理论大家武禹襄的“太极拳论”[7]讲:“……其根在脚,发于腿,主宰于腰,形于手指。由脚而腿而腰,总须完整一气……”这不仅讲明了力的传递过程:起自脚,发于腿,转由腰,运至手。而且强调,借助地面将下肢稳住了,上肢才能实现攻防的意向;起于下肢的力要通过躯干传达于上肢,上肢才能将力施加给对方。其后,有许多人和许多论文、专著讨论“其根在脚”的重要性和实施方法[8-10]。太极拳中的长劲就是运用地面的力攻击对方的发劲方法[11]。
二是人体的整体动量。动量在力学中是指物体质量和速度的乘积,在太极拳中用来描述太极拳的拳劲[12]。太极拳讲究“一动无有不动”,其攻击和防守是在肢体不断变化的运动中实现的,有速度、有质量,正如太极拳宗师王宗岳在《十三势行功心解》[13]中讲:“……所谓变动虚实也,……运劲如百炼钢,……发劲如放箭,……”采用力学的术语是具有“动量”。例如“靠”是太极拳的近身战术,是以胸、肩的(平动)动量靠击对方,威力很大。又如太极拳的技术动作“转腰”形成的人体的旋转(角)动量,该旋转动量可产生很大的攻击力。也可用身体的平动和旋转动量传递给手(或其他肢体),再和对方发生关系。
三是源于相对运动形成的动量。太极拳宗师王宗岳在《十三势行功心解》[13]中说:“……曲中求直,蓄而后发。力由脊发,……”杨式太极拳宗师杨澄甫在《太极拳术十要》[8]中说“……能含胸则自能拔背,能拔背则能力由脊发,所向无敌也。”人的腰脊质量大,手臂质量小,两者相对运动时,腰脊很小的速度可造成手臂很大的速度。太极拳的短劲就是由腰脊发力通过臂手来打击对方[11]。抽丝、缠丝的螺旋劲是短劲的另一种形式,可以出其不意,局部制胜。两个接手处相对于本体的运动提供了很大的武术基础,是协同作战和组合拳法的人体功能的合理运用。
总之,力可以出自地面或者其他支撑面,攻击者将地上的正向反力和摩擦力直接传递给对方。力也可出自人体的整体动量,人体的动量和对方碰撞,给对方施加冲击力。力可以出自脊胸,脊胸和手的相对运动赋予手高速度和螺旋,手的动量和对方碰撞产生力。这三种力在实战中,或单独使用,或有机结合,或三力合用,完全因势而为,适时而发。这是太极拳的威力所在,尤其是其形成的太极拳的弹簧功力[14],可以集中优势兵力,避重就轻,以小胜大,以弱胜强,“牵动四两拨千斤”,使太极拳成为武术中的上乘功夫。
二、多力的立体模型
采用力学的隔离体来分析太极拳。把人体简化为一个刚体,见图1。各肢体简化成刚杆,刚杆的接点为刚性,脚和地面的接触处被简化为点。刚体的质量是,位于刚体的质心。人体的质心和重心重合。图中1、2两点为接手处。各接手处有一个广义外力作用于上。各接手处有一个广义相对加速度(即加速度和角速度的组合)。广义力和广义加速度各有六个分量,用和来表示。图中在1、2两点的上方标有着六个分量的示意图。图1中:
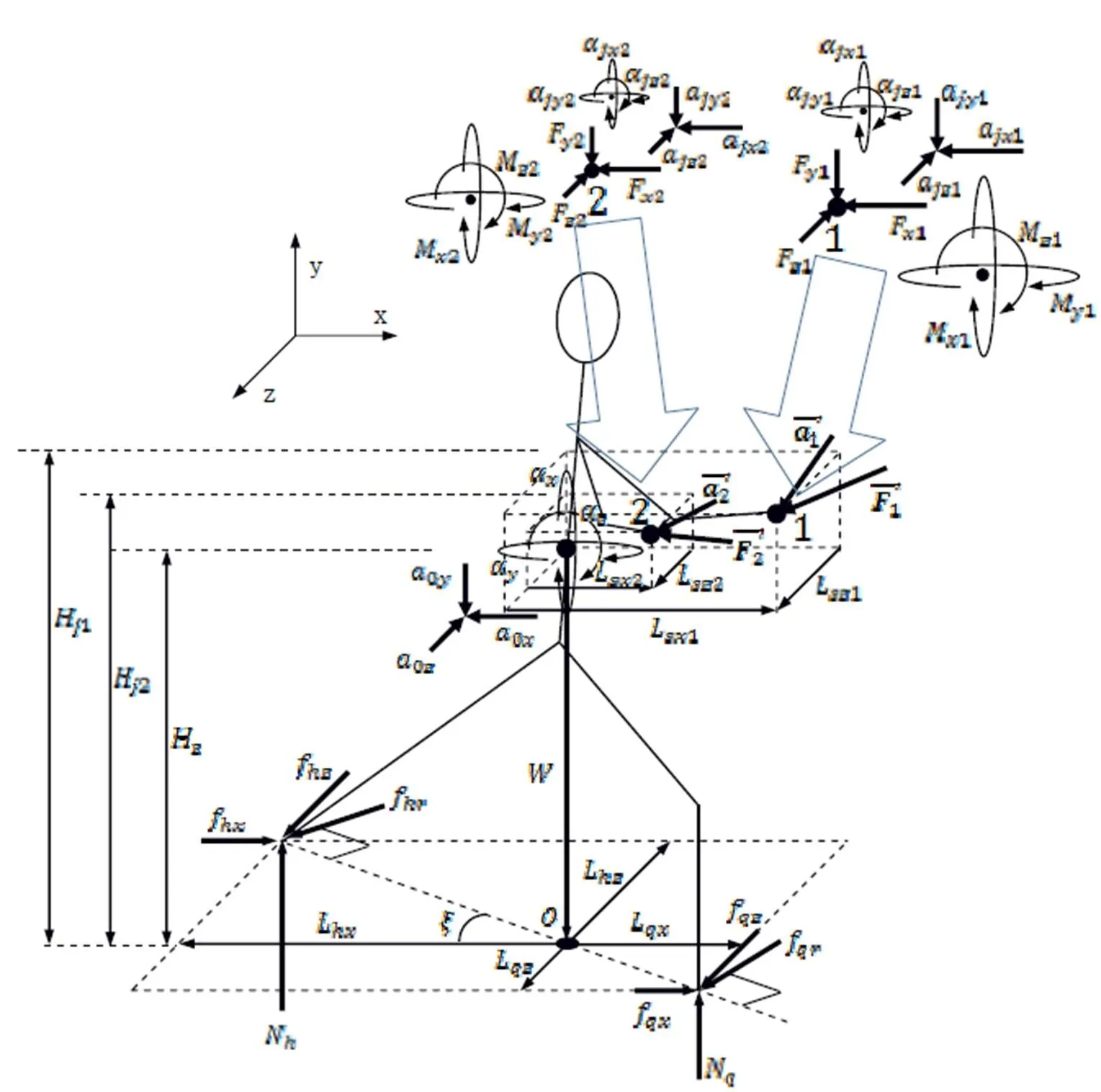
图1立体模型

(1)
将(1)式应用于在水平方向x、横方向y、和垂直方向z得到三个平动平衡方程。
转动定律是外力矩之和等于转动惯量与角加速度乘积之和,

(2)
图1中重力线与地面的交点是,通过点有沿x、y、z向的三条定轴。将(2)式应用于这三条定轴得到三个转动平衡方程。
将(2)式应用于通过两脚连线的定轴得到发向转动平衡方程。
概括平衡条件和七个平衡方程解,我们得到多力立体模型的数学表达式:
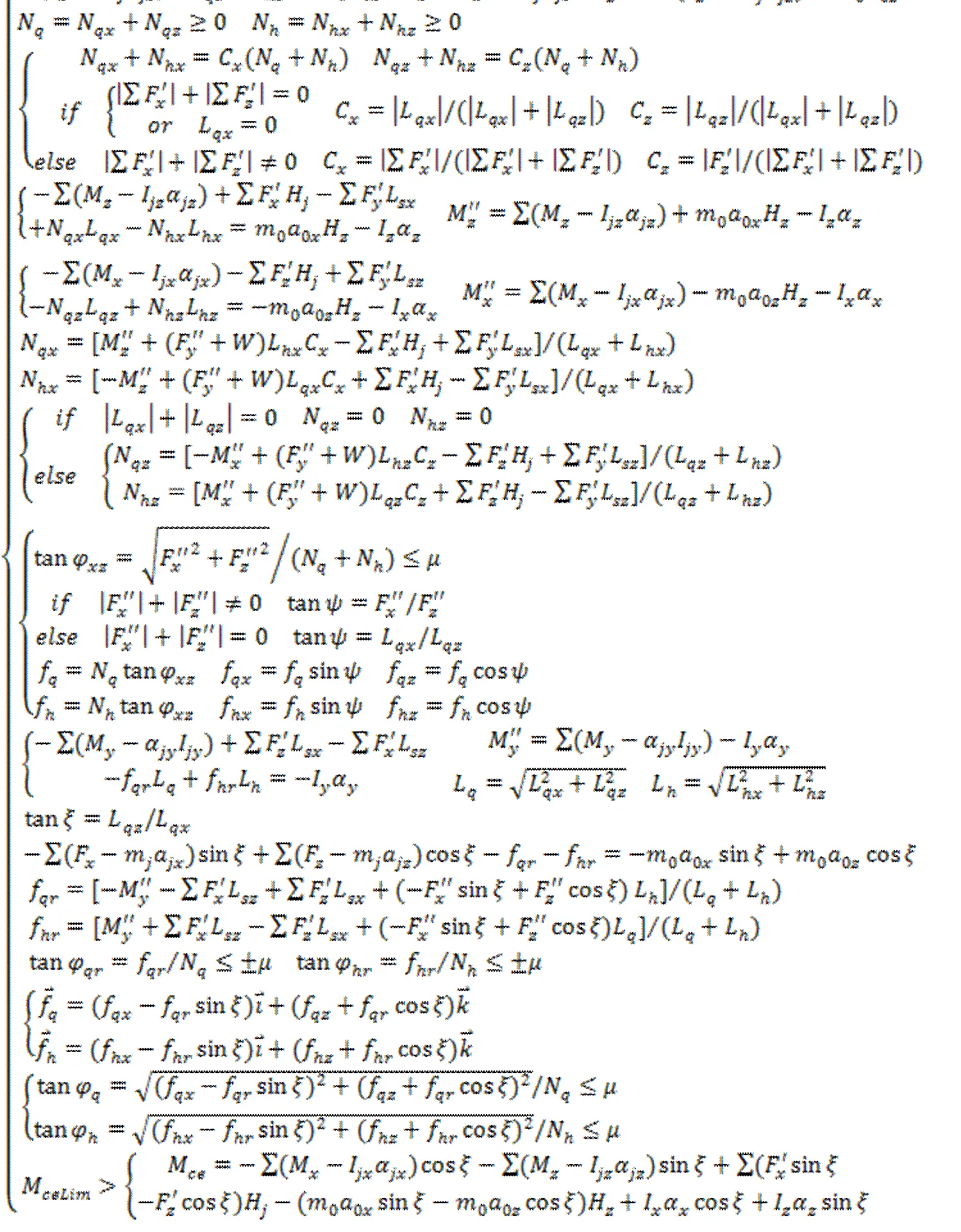
(3)式适用于任意多个接手点。在编软件时,采用了两个接手点。
三、分析太极拳招式手挥琵琶
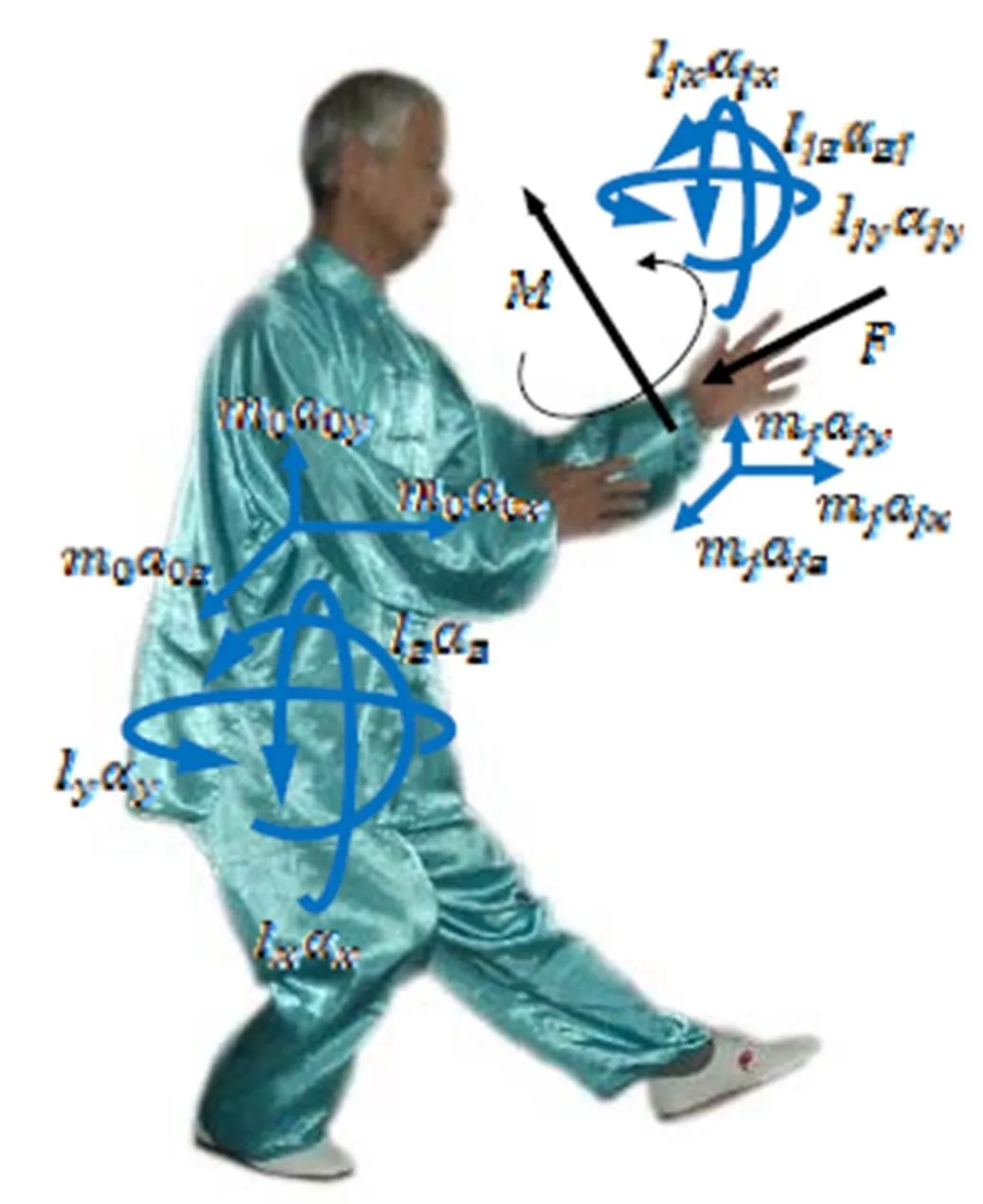
图2 手挥琵琶
图2是手挥琵琶的拳照。表1是接手1处临界力的计算。通常手挥琵琶两手扶着对方小臂;我方左手在前上方,右手在后下方;我方左手向右挒,右手向左挒,而产生一个挒矩。虽然这个力矩由两手产生,但可作为一个量来计算。表1的第一行是其分析结果,临界力矩列于第一行的绿格子内:牛顿米。一个力矩有三个分量,本例中的第三分量为零。一个广义的力由一个力和一个力矩组成。手挥琵琶可以在对挒的同时将两手向斜上方发力,即同时发出一个力矩和力的组合;表2的第二行是其分析结果,临界广义力有四个分量:;力的单位是牛顿,力矩的单位是牛顿米。可以在手挥琵琶中加入整体的平动;既加入由于平动速度和加速度对发力的影响;表1的第三行是其分析结果,临界力的四个分量是:。再可以在手挥琵琶中加入整体的转动;既加入由于转速和角加速度对发力的影响;表1的第四行是其分析结果,临界力的四个分量是:。又可以在手挥琵琶中加入手相对于上体的平动;既加入由于相对速度和加速度对发力的影响;表2的第五行是其分析结果,临界力的四个分量是:。还可以在手挥琵琶中加进手相对于上体的转动;既加入由于相对转速和角加速度对发力的影响;表1的第六行是其分析结果,临界力的四个分量是:。由表1的结果可以看出,在保持自身平衡的同时,合理加入各项运动能提高临界发力量。
表1 接手1的挥琵琶的临界力(力矩)的计算

表1中的手挥琵琶的力矩是作为一个量,计算结果列于第一行,为做比较又列于表2的第一行。实际应用中,这个力矩是由两手对挒生成,使用了两个力。运用软件对这两个力进行运算。力矩的中心在和处。左手接手于和处力向右;右手接手于和处力向左。把这些条件输入软件,算出表2的第二行。临界挒力为牛顿。这对挒力在水平向产生牛顿米;在垂直产生牛顿米,这正好是第一行中的挒矩。这验证了软件应用于一对挒力和一个力矩的等价性质。太极拳有很多两手合作的的技法。在力学上作用于物体的“两个力”可以化为“一个力和力偶(广义力)”。力偶使对方旋转加速,是导致对方就地旋倒的力学要素。太极拳的缠丝和抽丝也产生力偶,力偶的旋动方向通常和对方的动向垂直,很小的力偶能偏折对方很大的攻势。我们都知道螺丝刀有小力钻硬木的功能,太极拳的缠丝和抽丝和螺旋类似,具有“四两拨千斤”的力学效应。
表2 手挥琵琶中力矩和一对挒力的等价
四、分析太极拳招式搂膝拗步
图3是搂膝拗步单接手时的拳照,只对右手的水平推力作了计算,结果见表3第一行。图4是搂膝拗步双接手时的拳照,对左手搂、右手推的连贯动作作了计算,结果见表3第二行。
图3 左搂膝拗步单接手
图4 左搂膝拗步双接手
表3 搂膝拗步单、双接手的临界力计算

比较这两行可见,两手同时运作时,右手的推力的能力得到提高,左手的搂力占有假设的比例,侧向外力矩减小。可见同时搂推改进了搂膝拗步的攻防能力。搂膝拗步的技术规范应该是边搂边推,防攻同时,在力学上表现为两个力同时生效。
[1]顾杰,郭振兴,吕蒙. 用人体平面刚体模型分析太极拳在水平作用力下的力学原理[J]. 邯郸学院学报,2015(2).
[2]顾杰,郭振兴,马秀杰. 用人体平面刚体模型分析太极拳在三维作用力下的力学原理[J]. 邯郸学院学报,2015(4.
[3]顾杰,郭振兴,李恩杰. 三维力作用下人体立体刚体模型的太极拳力学分析[J]. 邯郸学院学报,2016(2).
[4]顾杰,王万宾,郭振兴. 定量分析高、中、低架的水平推拉力[J]. 中华武术·研究,2015(7).
[5]顾杰,郭振兴,卢建辉. 太极拳力学[M]. 北京:北京理工大学出版社,2016.
[6]顾杰,郭振兴,王万宾. 杨式精要37式太极拳及力学分析[M]. 北京:北京理工大学出版社,2016.
[7]武禹襄. 太极拳论[M].
[8]杨澄甫. 太极拳说十要[M].
[9]马承九. 太极拳的科学观[M]. 台北:东大图书公司,1994.
[10]肖飞. 太极拳的力学原理[M]. 北京:人民体育出版社,2009.
[11]顾杰常关成徐伟龙. 太极拳的“短劲”、“长劲”和全身发力法[J]. 少林与太极 2015. 1。
[12]顾杰,郭振兴,太极拳发劲的动量传递解析[J]. 邯郸学院学报,2013(4).
[13]王宗岳. 十三势行功心解[M].
[14]顾杰. 太极拳弹簧功[J]. 太极,2013(2,3,4,5,6).
(责任编辑:李俊丹 校对:苏红霞)
Analyzing Taijiquan combating Capability by multiple force 3D model
GU Jie, LI En-jie, GUO Zhen-xing
(Handan University, Taiji Cultural College, Handan 056005, Chinaa)
The fighting capabilities of Taijiquan are embodied in the postures, which are manifested in Free Combat and Push Hand. Multiple forces are usually applied simultaneously, cooperatively and in various forms. Therefore, this paper develops a multiple force 3d model for Taijiquan, and compiles a double force software, and especially analyzes the double force system of Taijiquan. A general force had three force components and three torque components. Double hand model simulates the punch, resolve, twist effect of two general forces. The 3d modal analyzes the structure, linear and rotatory motions of the body and hand, including the external forces. The software quantifies the static and dynamic effects of Taijiquan postures. Taijiquan postures of Hands Strum Lute and Divert Push Twist Step are analyzed as examples.
Taijiquan; mechanics; human model; root loss; slip; balance; delivery force; critical condition
G852.11
A
1673-2030(2017)01-0077-07
2016-02-05
顾杰(1955—),男,江苏苏州人,邯郸学院太极文化学院客座教授,美国通用汽车公司高级工程师,美国奥克兰大学机械制造博士。
猜你喜欢
高中数理化(2024年8期)2024-04-24 05:21:33
少林与太极(2023年5期)2023-07-14 03:01:48
少林与太极(2023年3期)2023-07-14 02:49:56
中学生数理化·中考版(2023年7期)2023-06-27 09:01:14
快乐语文(2021年11期)2021-07-20 07:41:32
快乐语文(2020年30期)2021-01-14 01:05:28
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27 02:30:46
武术研究(2020年2期)2020-04-21 10:33:26
中学生数理化(高中版.高考数学)(2020年1期)2020-02-20 13:23:44
中学生天地(A版)(2016年5期)2016-05-14 04:31:32