
四轮轮毂电机驱动电动汽车建模与联合仿真
2017-10-12 02:20:19葛平淑赵秀春崔艳秋
大连民族大学学报 2017年5期
葛平淑,张 涛,赵秀春,崔艳秋
(大连民族大学 a.机电工程学院 b.信息与通信工程学院,辽宁 大连 116605)
四轮轮毂电机驱动电动汽车建模与联合仿真
葛平淑a,张 涛a,赵秀春a,崔艳秋b
(大连民族大学 a.机电工程学院 b.信息与通信工程学院,辽宁 大连 116605)
利用Carsim和Matlab/Simulink搭建驾驶员闭环控制的四轮轮毂电机独立驱动电动汽车仿真模型;根据轮毂电机驱动电动汽车特点,建立轮毂电机模型、速度控制模型和整车模型;设计横摆力矩控制器和力矩分配控制策略,实现联合仿真的接口设置;最后利用双移线工况验证了所开发模型的正确性和转矩分配策略的有效性。
轮毂电机;电动汽车;模型;转矩分配;联合仿真
Abstract:To develop stability control algorithm and torque distribution strategy, a simulation model of in-wheel-motor-driven electric vehicles with closed-loop control of driver was established based on co-simulation of Carsim and Matlab/Simuink. According to the characteristics of in-wheel-motor-driven electric vehicles, the in-wheel-motor model, driver speed control model and the vehicle model was established respectively. The yaw moment controller and the torque distribution strategy were designed based on slide control theory, and the interface of co-simulation was set. Finally, the performance of the model and the torque distribution strategy were evaluated by double lane change test.
Keywords:in-wheel-motor; electric vehicle; model; torque distribution; co-simulation
四轮轮毂电机独立驱动电动汽车是当前国内外纯电动汽车领域研究的热点之一,其主要结构特征是将动力驱动电机直接安装在驱动轮内,具有输出力矩独立可控、传动效率高、结构紧凑等优点。与传统内燃机汽车相比,四轮轮毂电机驱动电动汽车的动力输出可以单独控制,其各车轮转矩可在电机能力范围内按照任意比例分配,实现滑移率和横摆力矩的控制。在动力性、稳定性及安全性方面具有更大的技术潜力[1-2],可以显著提高其适应恶劣道路环境的通过能力,其独特的驱动方式和巨大的发展潜力受到广泛研究和关注。
由于四轮毂电机驱动电动汽车独特的技术特点,一些在传统内燃机汽车上开发成熟、应用广泛的汽车安全和智能控制技术并不能直接应用在该类型电动汽车上[3-4]。为了实现对四轮轮毂电机独立驱动电动汽车的稳定控制和转矩分配策略的研究,有必要建立能够真实地反映其运行状态的仿真模型,从而实现对所开发算法的仿真与验证,减少前期研究开发的时间和费用。靳立强等[5]利用Simulink建立了考虑汽车垂向运动的18个自由度四轮独立驱动电动汽车的动力学仿真模型,便于开展四轮独立驱动电动汽车动力学控制研究;宗长富等[6]利用Simulink搭建了四轮驱动/四轮独立转向的电动汽车仿真模型,但该模型没有考虑汽车的垂向运动且对车辆运动模型的简化较大,仿真工况设置复杂。为了更好地体现车辆的真实运动状态,研究人员采用系统建模软件与汽车动力学仿真软件进行联合仿真的方式开展相应研究,其中Carsim汽车动力学仿真软件能全面反映汽车纵向、侧向和垂向的动力学特性,方便构建快速原型和硬件在回路的仿真。熊璐等[7]基于Carsim/Simulink开发了分布式驱动电动汽车动力学仿真模块;马高峰等[8]采用Carsim/Simulink联合仿真的方式建立四轮轮毂电机电动汽车仿真模型。但上述模型在建立过程中都未能充分考虑驾驶员控制模型的影响,且未给出各轮的力矩分配策略来验证所建立模型的有效性。
针对上述问题,根据四轮毂电机驱动电动汽车特点,结合Carsim传统内燃机汽车动力学仿真建模方法,在Simulink中建立轮毂电机模型、驾驶员控制模型,实现Simulink和Carsim对四轮毂电机独立驱动电动汽车的联合仿真,并设计横摆力矩控制器和力矩分配控制策略,用于验证仿真模型的正确性和可行性。
1 四轮毂电机驱动电动汽车模型
1.1 轮毂电机建模
采取转矩控制的方式可以直接控制轮胎与地面间的作用力,更利于实现汽车的牵引力、滑移率和横摆力矩等控制。因此本文采用直接转矩控制的方式对轮毂电机进行建模,运用查表的方式使得输出力矩满足电机外部特性的要求。电机实际输出力矩与输入力矩指令之间的关系可简化为传递函数:

式中,Tm表示轮毂电机实际输出力矩;Tmd为控制器输入电机的指令转矩即期望转矩;ξ为电机常数,由电机自身的特性决定。
轮毂电机峰值转矩特性图如图1,在Simulink中建立轮毂电机模型如图2。
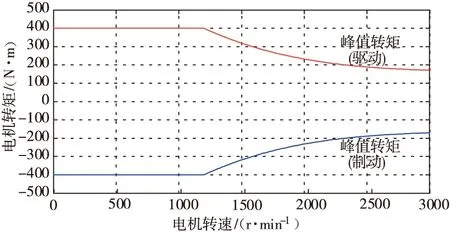
图1 轮毂电机转矩特性图
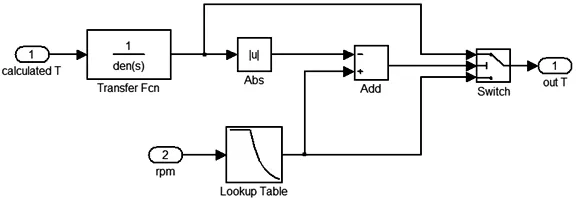
图2 轮毂电机模型图
1.2 Carsim传统内燃机汽车模型改进
Carsim是一款商用汽车动力学仿真软件,其建模方式为参数化建模,它提供的传动系统仅仅针对传统汽车,并没有四轮轮毂电机独立驱动结构。为实现对四轮轮毂电机独立驱动电动汽车的Carsim与Simulink联合仿真,需要对Carsim中的传动系统进行修改。本文选取Carsim中的D级SUV车型,保留原有转向、制动、悬架系统和轮胎模型,对其传动系统进行修改。将发动机、变速器、差速器改为外部输入形式,中断传动系与车轮之间的所有动力传输,将Simulink中电机模型的输入力矩直接作用于四个车轮上,改进示意图如图3。
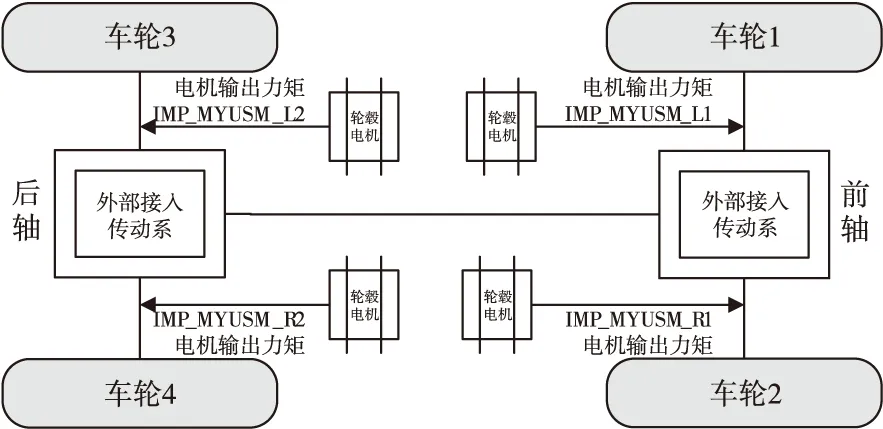
图3 Carsim传动系改进示意图
1.3 速度控制建模
由于所建立的仿真模型的动力来源于四个车轮的轮毂电机,因此Carsim自带的驾驶员速度控制模型不适用于四轮轮毂电机电动汽车,需要重新进行设计和修改。采用Simulink建立外部驾驶员速度控制模型和Carsim自带的驾驶员轨迹跟踪模型,驾驶员速度控制模型如图4。
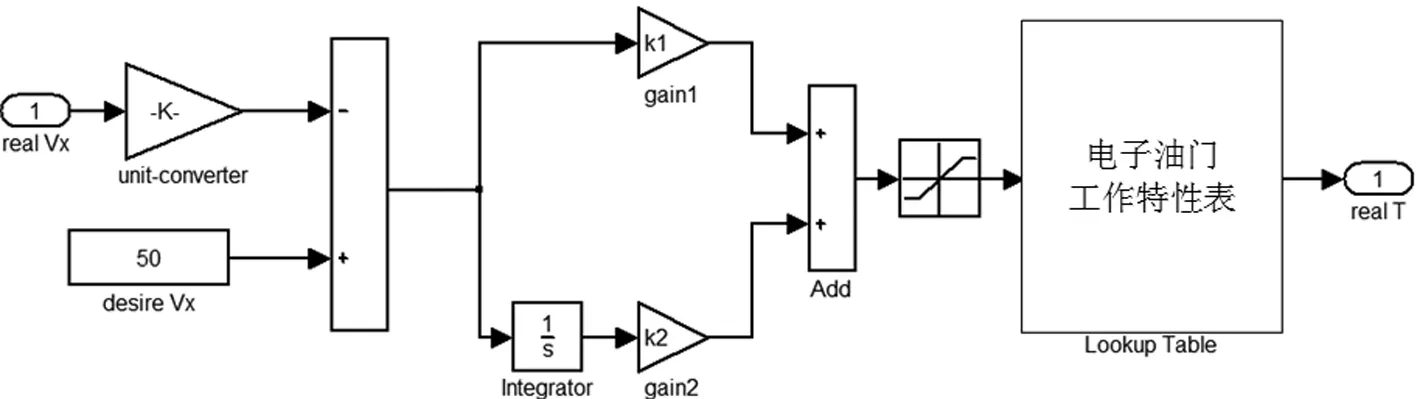
图4 速度控制模型
其工作思路为:将理想车速与实际车速的差值输入到PID控制器,PID控制器输出电子节气门开度;然后将电子节气门的开度输入到提前编制好的电子节气门工作特性图,进行查表,输出当前节气门开度下对应的输出力矩;输出力矩作用到四轮轮毂电机独立驱动电动汽车上,从而实现对其速度的调节。
1.4 横摆力矩控制器建模
利用滑模变结构控制的方法设计横摆力矩控制器,这种控制算法已在传统车上得到验证[9],横摆力矩控制器产生理想的横摆力矩来控制汽车的横摆运动。设计的滑模面和滑模条件为
s=γ-γd;
(2)
(3)
理想的横摆力矩
(4)
式中,Iz为汽车转动惯量;K为滑模控制器参数;δf为前轮转角;Fy1,Fy2,Fy3,Fy4分别为左前轮、右前轮、左后轮、右后轮所受到的侧向力;lf为前轴到质心的距离;lr为后轴到质心的距离;γ为实际的横摆角速度;γd为理想的横摆角速度。
1.5 力矩分配策略
假设同侧驱动轮的驱动力矩始终相同。当横摆力矩控制器不工作时,驾驶员的输入力矩平均分配到四个车轮;当横摆力矩控制器工作时,通过调整两侧车轮的力矩差值来达到产生理想横摆力矩的目的。
当横摆力矩控制器不工作时,四个车轮的驱动力矩相同,用公式表示为
(5)
式中,T1,T2,T3,T4分别为四个轮毂电机的输出转矩;Tdriver为驾驶员输入的力矩指令。
当横摆力矩控制器工作时,假设横摆力矩控制器计算所得的理想横摆力矩Mdesire,同轴左右车轮的力矩差值ΔT=Tright-Tleft,汽车轮距为lw,四个车轮的工作半径为r。车轮间力矩差值产生的横摆力矩等于横摆力矩控制器产生的横摆力矩,可表示为

(6)
选择Mdesire/4为基准力矩,在基准力矩的基础上对四个车轮的力矩进行调整,使得四个车轮既能满足驾驶员要求的驱动力矩,又能产生需要的力矩差值,调整公式为
(7)
(8)
2 基于Carsim和Simulink的联合仿真
2.1 输入输出接口设置
为了实现Carsim与Simulink的联合仿真,接口设置是必不可少的环节。Carsim中通过外部加载车轮转矩的方案有两种,分别是轮毂电机驱动方案和轮边电机驱动方案[7],其输入接口设置分别为IMP_MYUSM_L1和IMP_MY_OUT_D1_L。在Carsim中,IMP_MYUSM_L1的定义为来自非簧载质量作用到车轮的力矩;IMP_MY_OUT_D1_L的定义为来自差速器的作用到车轮的力矩(通过半轴输入到车轮)。为了实现四轮毂电机独立驱动电动汽车的仿真,选择第一种输入接口设置方法。此外,Carsim模型需要将车速和四个车轮的速度反馈到Simulink中的驾驶员速度控制模型和电机模型。输入输出接口设置见表1。
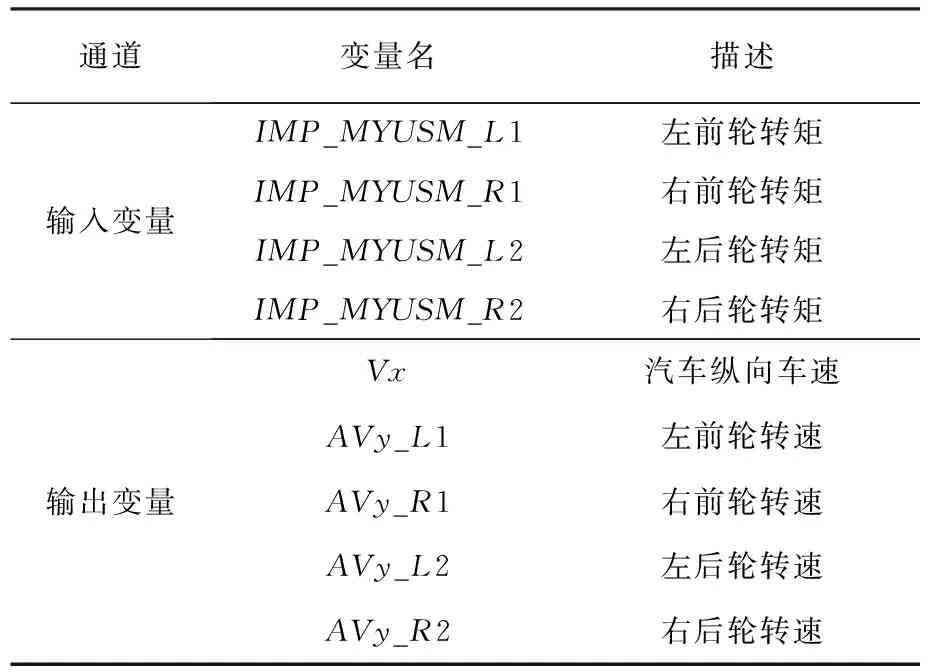
表1 输入输出接口设置表
在Simulink中搭建驾驶员速度控制模型、四个轮毂电机模型以及力矩分配策略模型。轮毂电机根据力矩分配策略输出力矩到Carsim中的四个车轮,同时Carsim将车速信号、车轮转速信号以及控制器需要的其他信号输送到Simulink中,这就形成了完整的驾驶员闭环控制的四轮轮毂电机独立驱动电动汽车仿真模型。
2.2 整体模型的建立
基于前面对轮毂电机模型、驾驶员速度控制模型以及传动系模型的分析,建立整车仿真模型如图5。
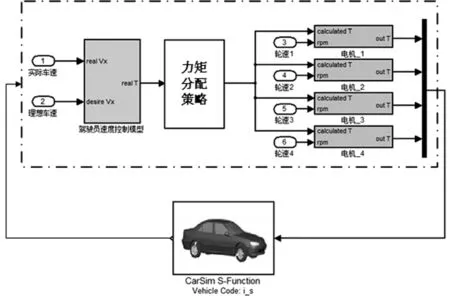
图5 联合仿真框图
3 典型工况仿真分析
为了验证仿真模型的正确性和可行性,对所开发的四轮轮毂电机电动汽车模型进行典型工况的仿真分析,整车参数设置见表2。
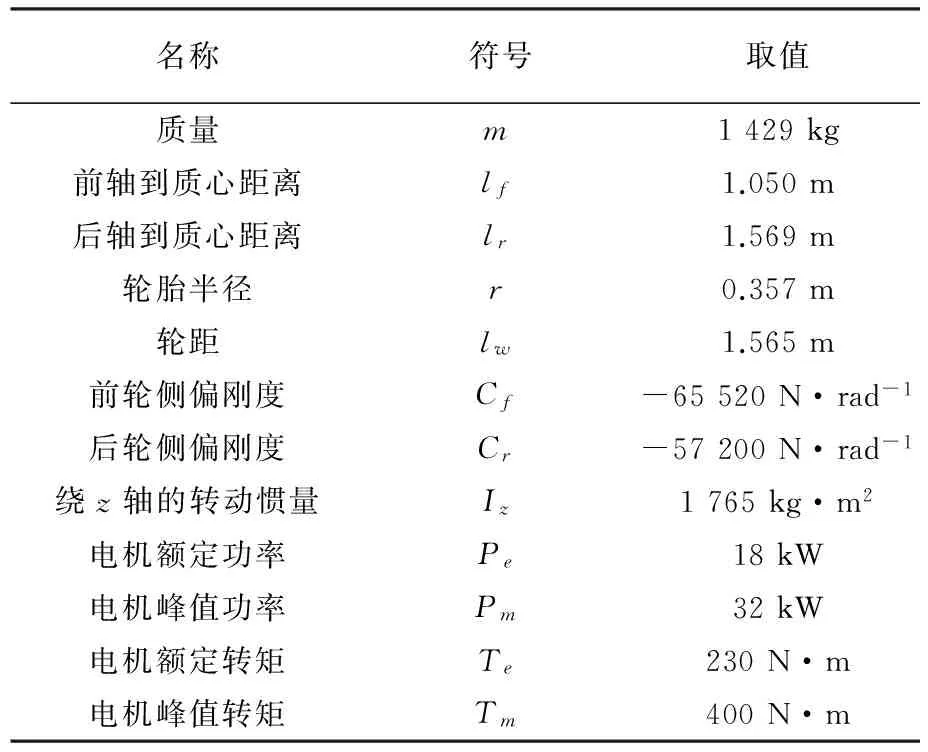
表2 汽车模型仿真参数
3.1 仿真工况设置
双移线工况是验证汽车稳定性的典型工况,利用该仿真工况可以综合验证所建立联合仿真模型的动力性和操纵的稳定性。地面摩擦系数为0.5,汽车在进入入口前以恒定的车速65km·h-1的速度向前行驶,进入入口后驾驶员始终保持车速不变,行驶轨迹如图6。
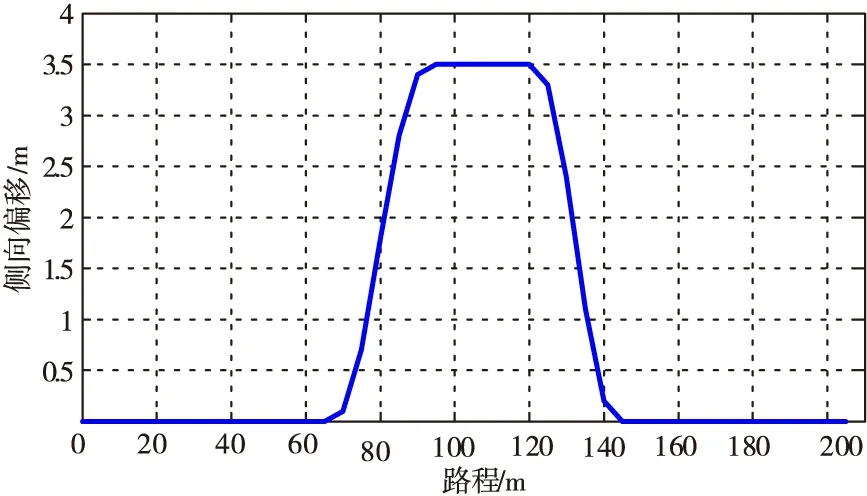
图6 双移线工况汽车轨迹图
3.2 仿真结果及分析
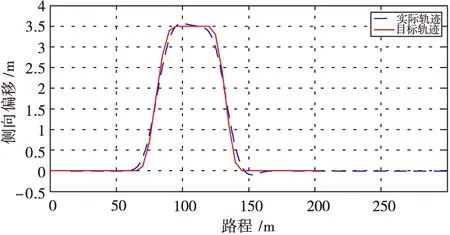
双移线工况下基于Carsim与Simulink联合仿真的四轮轮毂电机独立驱动电动汽车的响应特性曲线如图7,包括:汽车目标轨迹与实际轨迹对比图、目标车速与实际车速对比图、理想横摆角速度与实际横摆角速度对比图以及汽车实际输出的质心侧偏角变化图。
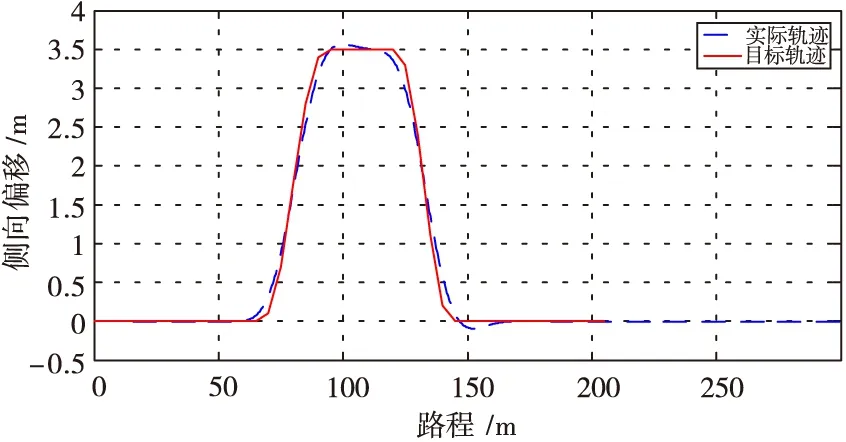
(a)目标轨迹与实际轨迹对比图
(b)目标车速与实际车速对比图
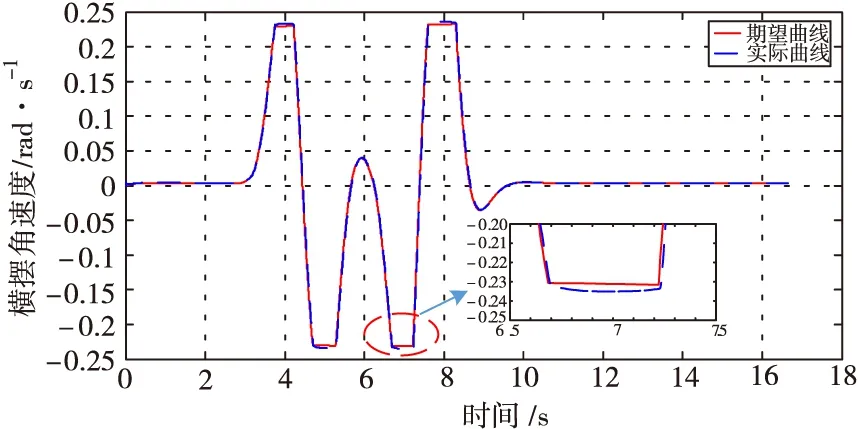
(c)理想横摆角速度与实际横摆角速度对比图
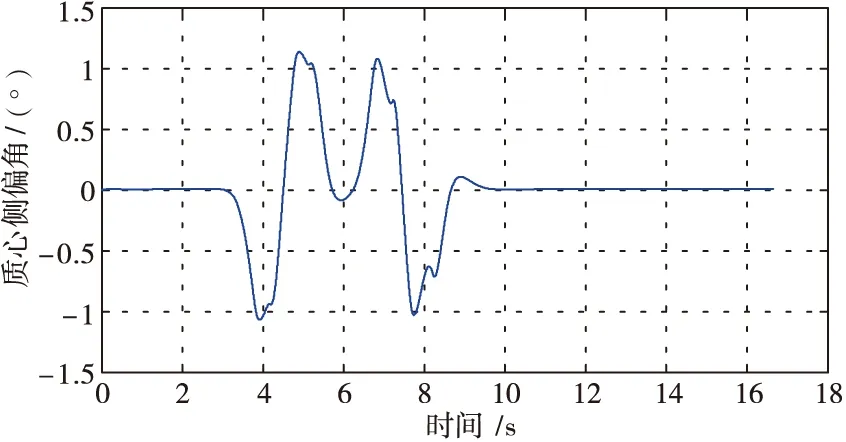
(d)汽车质心侧偏角
由这些响应图可以看出,仿真模型运行轨迹与理想轨迹的偏差很小,说明所建立模型的转向性能很好。汽车的纵向车速与理想车速的偏差保持在0.2 km·h-1范围内,说明所建立的驾驶员速度控制模型合理,同时说明所建立模型的动力性很好。汽车的横摆角速度变化曲线与理想横摆角速度曲线图几乎是重合的,汽车的质心侧偏角最大值为1.2°,说明所建立模型的具有良好的横向稳定性。
4 结 论
本文利用Carsim和Simulink搭建了驾驶员闭环控制的四轮轮毂电机独立驱动电动汽车整车模型,详细给出了一套简单有效的各轮力矩分配控制策略,仿真结果表明,本文所建立的四轮轮毂电机独立驱动电动汽车模型具有良好的操纵稳定性和动力性,其运行轨迹、车速、质心侧偏角、横摆角速度与理想值都非常接近,模型精确度高,力矩分配控制策略有效,为四轮轮毂电机独立驱动电动汽车稳定性控制算法的研究奠定了良好的基础。以后的研究可在该仿真模型基础上进行汽车主动安全控制算法的开发与验证。
[1] NAM K, FUJIMOTO H,HORI Y. Lateral stability control of in-wheel-motor-driven electric vehicles based on sideslip angle estimation using lateral tire force sensors[J]. IEEE Transactions on Vehicular Technology, 2012, 61(5): 1972-1985.
[2] SHINO M, NAGAI M. Yaw-moment control of electric vehicle for improving handling and stability [J]. JSAE review, 2001, 22(4): 473-480.
[3] 李克强, 张书玮, 罗禹贡, 等. 智能环境友好型车辆的概念及其最新进展[J]. 汽车安全与节能学报, 2013, 4(2):109-120.
[4] 余卓平, 冯源. 分布式驱动电动汽车动力学控制发展现状综述[J]. 机械工程学报, 2013, 49(8): 105-114.
[5] 靳立强, 王庆年, 岳巍强, 等. 基于四轮独立驱动电动汽车的动力学仿真模型[J]. 系统仿真学报, 2005, 17(12): 3053-3055.
[6] 宗长富, 刘经文, 郑宏宇, 等. 4WID/4WIS 电动车建模和特殊工况仿真[J]. 汽车工程, 2011 (10): 829-833.
[7] 熊璐, 陈晨, 冯源. 基于 Carsim/Simulink 联合仿真的分布式驱动电动汽车建模[J]. 系统仿真学报, 2014, 26(5): 1143-1148.
[8] 马高峰, 李刚, 韩海兰. 基于 CarSim 的四轮轮毂电机电动汽车建模方法研究[J]. 农业装备与车辆工程, 2015, 53(7): 8-11.
[9] YOON J, CHO W, KOO B, et al. Unified chassis control for rollover prevention and lateral stability[J]. Vehicular Technology, IEEE Transactions, 2009, 58(2): 596-609.
(责任编辑 赵环宇)
ModelingandCo-simulationforFour-in-wheel-motor-drivenElectricVehicle
GEPing-shua,ZHANGTaoa,ZHAOXiu-chuna,CUIYan-qiub
(a. School of Electromechanical Engineering b. School of Information and Communication Engineering,Dalian Minzu University, Dalian Liaoning 116605, China)
U469.72
A
2017-03-28;
2017-04-27
国家自然科学基金资助项目(51575079);中央高校基本科研业务费专项资金资助项目(DC201502010306,DC201502060408,DCPY2016095,DCPY2017010)。
葛平淑(1983-), 女,山东五莲人,讲师, 博士,主要从事智能车辆、汽车动力学与控制的研究。
2096-1383(2017)05-0451-05
猜你喜欢
上海涂料(2021年5期)2022-01-15 06:09:26
小读者(2019年24期)2020-01-19 01:51:36
汽车观察(2019年2期)2019-03-15 06:00:34
制造技术与机床(2017年10期)2017-11-28 05:24:18
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:30
制造业自动化(2017年2期)2017-03-20 14:26:14
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
发明与创新·中学生(2016年7期)2016-05-14 04:08:26
航天制造技术(2016年6期)2016-05-09 08:32:51
