
轿车主动悬架系统级联式控制策略研究
2017-10-11 07:06郭超刘丹丹
汽车零部件 2017年9期
郭超,刘丹丹
(运城职业技术学院,山西运城 044000)
轿车主动悬架系统级联式控制策略研究
郭超,刘丹丹
(运城职业技术学院,山西运城 044000)
对主动悬架系统控制策略进行深入研究,相比传统主动悬架模糊PID控制策略,最优控制与滑模控制级联控制策略有更好的控制效果。研究结果对于提高轿车主动悬架控制性能具有一定的实用价值。
主动悬架;滑模控制;级联控制策略
0 引言
车辆的运行工况一般比较复杂,因此车辆对悬架系统的性能需求也比较多。人们希望悬架系统可以缓和路面冲击,衰减车身振动,所以需要悬架系统有较小的悬架刚度。但是悬架系统的刚度还需要同时满足车辆对于操纵稳定性的需求,传统的悬架系统设计过程中只能选择折中方案,因此无法将操纵稳定性和平顺性同时做到最好。被动悬架不能自主地根据外界车辆运行工况和外界干扰改变性能参数。为了改变被动悬架的这种缺陷,人们提出多种改善车辆悬架系统的方案,主动悬架是一种提升悬架性能的有效方法[1]。
1 级联式控制策略的原理和优势
1.1 级联式控制的基本原理
级联式控制策略是指将一个复杂的控制对象模型根据其结构特点,将它分解为多个层次的简单模型,如顶层模型和底层模型、内环模型和外环模型等,然后根据简单模型的特点分别使用不同的控制策略进行控制,从而实现对复杂对象模型的最优控制。级联式控制策略主要针对包含线性、非线性、时变、定常等环节的较复杂的控制对象,见图1。
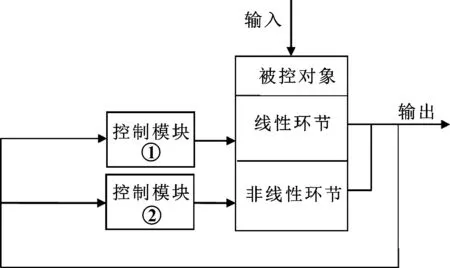
图1 级联式控制方法
1.2 级联式控制优点
级联式控制策略的优势在于能够简化研究对象模型,将其分解为简单的控制问题,并可以选择合适的控制策略对分解后的控制模型进行控制,从而发挥各个控制方法的优点,避免其劣势,因此级联式控制策略在整体研究对象层面上能实现更好的控制性能[2],详见表1。

表1 常见控制算法的优缺点
2 级联式控制策略模型
2.1 级联式控制策略模型建立


(1)
设计滑模控制律为:

[-(β/μ)x5-αS(x2-x4)+γx6w0]}
(2)
将式(2)代入式(1)中,得:
(3)


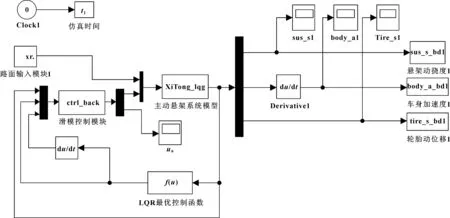
图2 主动悬架最优控制与滑模控制级联控制仿真模型
2.2 仿真随机路面输入模型
车辆行驶的路面通常可以用路面不平度函数来表示。路表面相对于基准面的距离为q,顺着路面走向方向长度I的变动q(I)称作路面不平度函数。在对不平度进行测绘时,通常使用水准仪或者专业的路面计来获得道路表面纵向截面上的q(I)值。通过大量测量得到路面q(I)值的随机性数据,使用计算机进行统计分析处理,可以得出路面不平度的功率谱密度函数Gq(n)或σq2等统计学特征参数,见图3。
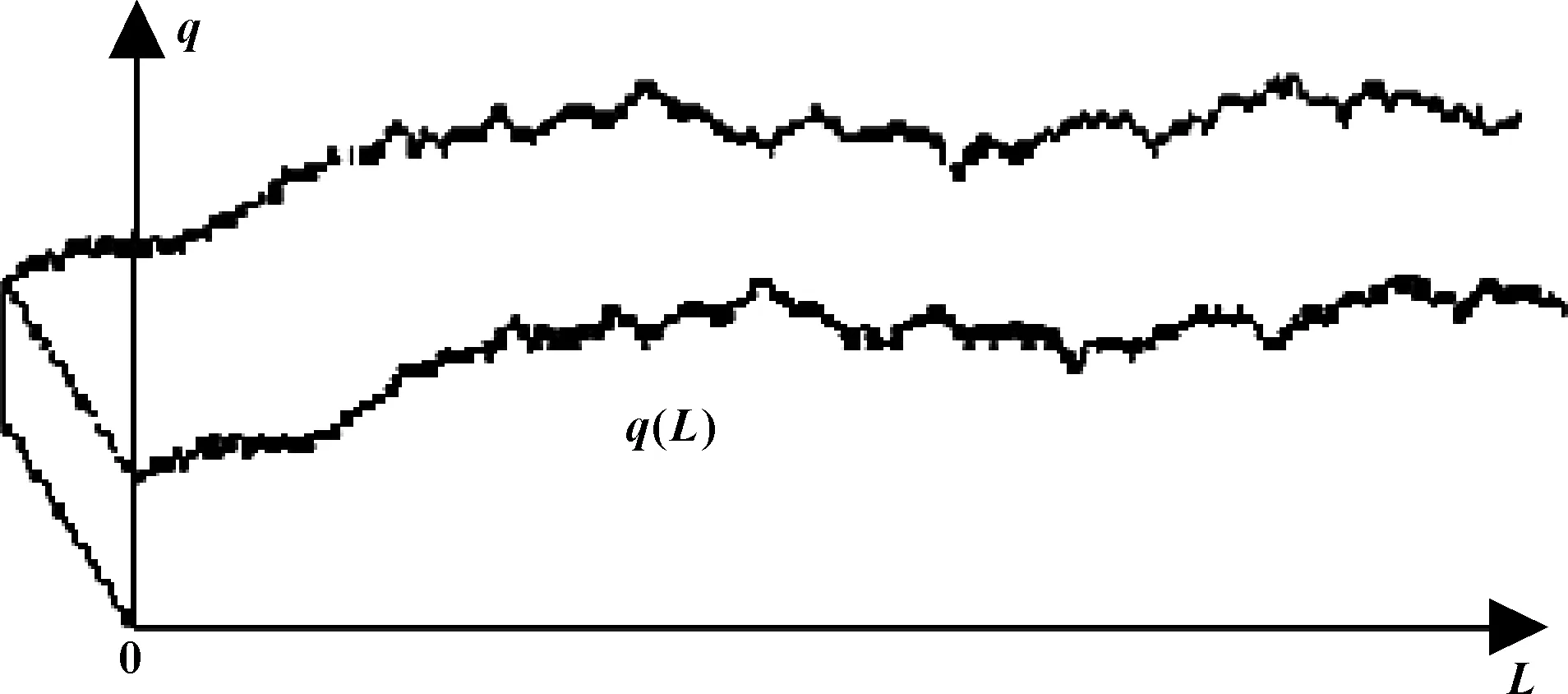
图3 路面的纵向截面走势曲线图
3 模糊PID控制和级联式控制策略仿真结果对比分析
为了充分研究两种控制策略的控制效果,将悬架各个性能指标进行对比,可以得到简单颠簸路面输入下主动悬架的各项性能响应对比分别如图4—6所示。

图4 悬架系统车身加速度响应对比图

图5 悬架系统悬架动挠度响应对比图

图6 悬架系统轮胎动位移响应对比图
4 结束语
从仿真结果可以看出:简单颠簸路面上,最优滑模级联式控制策略不仅使得车身加速度峰值降低30%,还使系统的调节速度更快,超调量更小,鲁棒性能更高;悬架动挠度和轮胎动位移峰值在两种路面上都下降了20%以上。最优滑模级联控制采用车身加速度、悬架动挠度、轮胎动位移等多个变量作为反馈,可以调节各个性能指标的权值,从而得到不同工况的最优控制效果。最优滑模级联式控制策略可以使用需求状态量较少的输出调节最优控制代替状态调节最优控制,减少传感器数量,降低成本[4]。综上所述,最优滑模级联控制策略的效果要优于模糊PID控制策略,综合悬架的各项性能指标。
[1]王国丽,顾亮,孙逢春.车辆主动悬架技术的现状和发展趋势[J].兵工学报,2000,21(S1):80-83. WANG G L,GU L,SUN F C.Current Status and Tendency of Development in Vehicle Active Suspension[J].ACTA Armamentarii,2000,21(S1):80-83.
[2]陈翔,张林燕.汽车可控悬架及其控制策略的研究动态[J].公路与汽运,2005(1):3-5.
[3]寇发荣,方宗德.汽车可控悬架系统的研究进展[J].汽车工程,2007,29(5):426-432. KOU F R,FANG Z D.The Research Trend in Controlled Suspension System of Vehicles[J].Automotive Engineering,2007,29(5):426-432.
[4]寇发荣.车辆电动静液压主动悬架系统的设计与试验研究[J].机械传动,2009,33(4):86-89,138. KOU F R.Design and Experiment of Vehicle Active Suspension with Electro-hydrostatic Actuator[J].Journal of Mechanical Transmission,2009,33(4):86-89,138.
ResearchonCascadeControlStrategyforAutomobileActiveSuspensionSystem
GUO Chao, LIU Dandan
(Yuncheng Polytechnic College,Yuncheng Shanxi 044000,China)
The control strategy for active suspension system was studied deeply. Compared with traditional active suspension fuzzy PID control strategy, the optimal control and slide control cascade control strategy had better control effect. The research results have certain practical value for improving the control performance of vehicle active suspension.
Active suspension;Sliding mode control; Cascading control strategy
U463.33
A
1674-1986(2017)09-061-03
10.19466/j.cnki.1674-1986.2017.09.015
2017-05-24
郭超(1987—),男,硕士, 高级技师,研究方向为汽车检修。E-mail:345829320@qq.com。
猜你喜欢
核安全(2022年3期)2022-06-29
同位素(2022年1期)2022-02-14
北京航空航天大学学报(2021年6期)2021-07-20
电脑知识与技术(2020年15期)2020-07-04
江苏教育·职业教育(2019年5期)2019-07-08
青岛画报(2017年12期)2018-02-06
财会学习(2018年2期)2018-01-24
农业知识·百姓新生活(2017年2期)2017-03-07
电脑知识与技术(2016年31期)2017-02-27
汽车与新动力(2014年4期)2014-02-27
