
微网虚拟同步发电机下的自适应滑模控制策略
2017-10-09 08:43:01李鹏王奔赵思臣
电气自动化 2017年3期
李鹏, 王奔, 赵思臣
(1.西南交通大学 电气工程学院,四川 成都 610031;2.中国核动力研究设计院 反应堆工程研究所, 四川 成都 610031)
微网虚拟同步发电机下的自适应滑模控制策略
李鹏1, 王奔1, 赵思臣2
(1.西南交通大学 电气工程学院,四川 成都 610031;2.中国核动力研究设计院 反应堆工程研究所, 四川 成都 610031)
虚拟同步发电机(virtual synchronous generator,VSG)通常用作微网逆变器中各种分布式电源的接口,以便使系统具有更大的惯性。负荷中的不平衡和非线性负载会对逆变器输出电压造成的影响。为此,设计了一种电压自适应滑模控制器。以VSG作为基础控制器,然后根据系统在αβ坐标系下的方程,将系统的负载电流作为扰动,设计自适应扰动补偿,使系统能在保持稳定的条件下,减少输出电压的抖振。最后,对控制策略进行仿真,结果验证了控制策略在电压不平衡与谐波抑制方面的有效性与鲁棒性,提高了微网逆变器输出电压的电能质量,减少了并联逆变器之间的环流。
虚拟同步发电机;负载扰动;自适应滑模;鲁棒性;电能质量
Abstract: The virtual synchronous generator (VSG) is usually used as an interface for various distributed generation in a micro-grid inverter to increase system inertia. Unbalanced and nonlinear loads will affect the output voltage of the inverter. For this reason, this paper designs a voltage adaptive sliding mode controller. Using VSG as basic controller and based on the system equations in theαβcoordinate system, this paper uses system load current as disturbance to design an adaptive disturbance compensation to reduce chattering of the output voltage under the condition that the system remains stable. Finally, the result of simulation of the proposed control strategy verifies that it is effective and robust with respect to voltage unbalance and harmonic suppression, thus improving the power quality of the output voltage of the micro-grid inverter and reducing circulating current between paralleled inverters.
Keywords: virtual synchronous generator (VSG); load disturbance; adaptive sliding mode; robustness; power quality
0 引 言
在微电网的运行中,逆变接口的控制是其中关键问题,VSG由于能增大逆变系统的惯性得到了广泛的关注[1,3][2]165。现有的关于VSG的研究主要基于线性平衡负载。在现实中,负荷中含有大量与不平衡和非线性负载,会对微电网输出的电压质量造成严重影响。目前,相关文献针对微网中的不平衡与非线性负载,主要是从逆变器结构以及消除和补偿特定谐波的角度进行研究。文献[4]针对含不平衡负载的微网采用常规的2阶滑模控制,在消除输出电压不平衡度方面有一定效果,但是该控制方法针对非线性负载的有效性却没有探讨。文献[5]针对微电网中不平衡和非线性负载的问题,提出了一种含不平衡控制环和谐波控制环的混合控制策略,但是该控制方法只能消除输出电压中特定次数的谐波。文献[6]针对微电网VSG下含不平衡和非线性负载的问题,提出了基于虚拟阻抗和PIR控制相结合的方法,控制效果较好,但是控制策略较复杂,系统参数多,不易整定。文献[7-8]提出了一种能适应微电网不同电能质量需求的多功能逆变器,实验结果证明其对不平衡负荷及非线性负荷有良好的控制效果,但其补偿电流求解过程繁琐,过多的变量引入也使得控制系统设计较为复杂。
同时,逆变系统中的滤波元件由于受环境因素以及测量元件精度影响,实际值与理论值有一定的偏差,会对控制器的效果造成一定影响[9]。滑模控制作为一种高度灵活性的控制方法,比其他非线性控制方法更易于实现,它可以保证系统在参数不确定、存在外界干扰情况下的稳定性和鲁棒性。在实际控制系统中,由于系统参数变化、外部扰动等因素的影响,通常难以获得控制对象的精确模型,使传统滑模控制无法达到理想品质[10-13]。因此,本文提出基于虚拟同步发电机下的电压自适应滑模控制,保证了微电网在带不同负载下输出电压的电能质量,减轻了传统滑模控制下抖振过大的问题。通过与PI双环控制与传统滑模控制的对比仿真,验证了所提控制策略的有效性与优越性。
1 系统建模及控制器设计
1.1 微电网逆变器结构
图1为基于LC滤波的三相微网逆变器结构图。其中,直流母线电压Vdc由可再生能源提供。图中,Lf为逆变器侧滤波电感,Rf为滤波电感上的等效电阻,Cf为滤波电容;Rg和Lg分别为线路等效电阻和电抗,ui为逆变器出口侧输出电压,uo为滤波电容电压、io为阻抗线路电流,zload为负载阻抗。
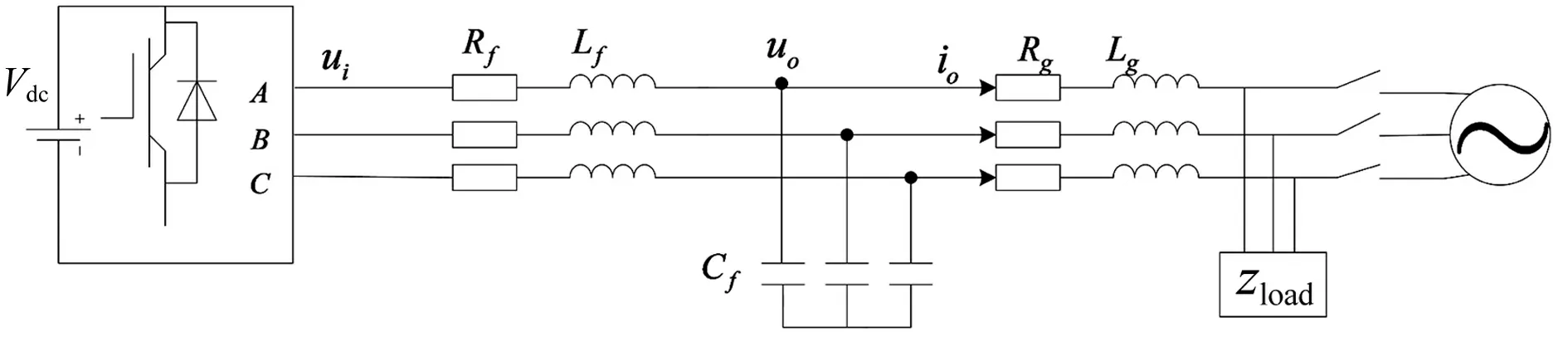
图1 微电网逆变器结构图
1.2 VSG结构模型
考虑如图1所示的微电网主电路结构,借鉴同步发电机的转子运动方程以及电磁方程,给出具体的VSG控制策略[2]167,VSG的转子运动方程可表示为:
(1)
式中Pm、Pe分别为同步发电机的机械、电磁功率;在极对数为1的情况下,同步发电机的机械角速度ω即为电气角速度;ω0为电网同步角速度;D为阻尼系数;J为转动惯量。
在α-β静止坐标轴中,逆变器输出的有功功率p和无功功率q一般是通过瞬时无功理论计算而得,其计算表达式如下:
(2)
为了提高控制的精度,改善电能质量,将所得瞬时功率经过低通滤波器,进而获得VSG所需的电磁功率pe和无功功率Q。
参考同步发电机励磁系统,设计逆变系统的无功-电压控制器如图2所示。其中Qref为无功功率输入设定值;n为无功下垂系数;Uref为逆变电源端压参考值;U为逆变电源的输出电;kp、ki为比例积分系数。
(3)
从而可以得到电压控制器三相参考电压如下:
(4)
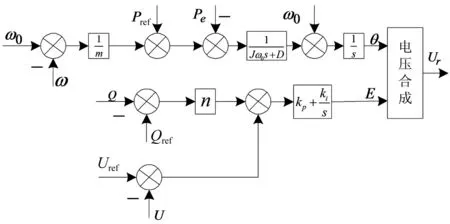
图2 VSG 控制结构框图
1.3 自适应滑模控制器设计
由图1结合基尔霍夫定律,可得微网三相逆变器的数学模型如下:
(5)

(6)
可以看出三相逆变器模型在αβ坐标轴下不存在耦合,故可以对αβ轴进行分别控制。电压环控制器设计的主要目的是实时跟踪参考电压,同时具有良好的抗干扰能力。从式(6)可以得到以下状态方程(以下公式都以α轴为例并省略下标):

(7)

假定逆变器输出电压uo跟踪VSG下电压参考值ur,那么电压跟踪误差e=uo-ur。现有的滑模变结构控制器大多数是在比例微分二阶滑模变结构控制的基础上设计的,设计方法简单,但系统的输出精度不高,存在一定的稳态误差。为此在二阶滑模的基础上加入电压偏差的积分环节。定义三阶滑模面函数如下:
(8)
式中k1,k2表示滑模面控制系数,且均为正常数。对滑模面求导可得:
(9)
(10)
设计如下的控制律:
(11)

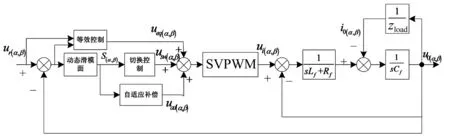
图3 自适应滑模控制框图
为了保证所设计的控制律在所定义的滑模面上全局渐进稳定,定义Lyapunov函数为:
(12)

对函数(12)求导得:

以上分析证明了本文所提自适应滑模电压控制策略的全局稳定性。
2 仿真分析
为验证本文所采用控制策略的可行性和有效性,在MATLAB/Simulink中搭建如图3的模型进行仿真验证,系统参数如表1所示。
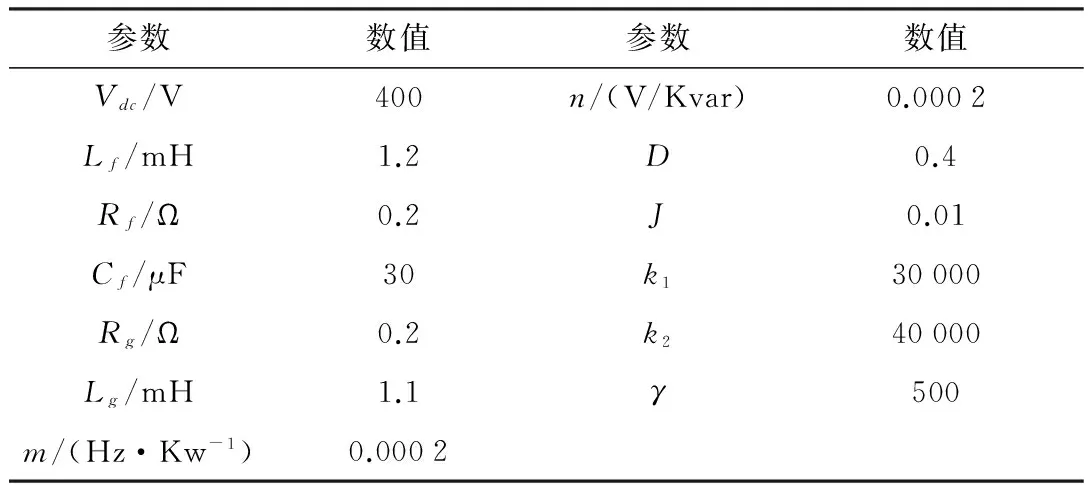
表1 系统参数
2.1 非线性负载
初始情况下,系统带三相平衡线性负载,在0.3 s突增整流性非线性负载,图4(a)为PI双环控制下的电压波形,可以看出电压波形出现了明显的畸变;图4(b)为普通滑模控制下的电压波形,可以看出输出电压波形畸变较小但抖振比较明显;图4(c)为自适应滑模控制下的电压波形,输出电压波形平滑且畸变很小。图4(d)为自适应滑模控制下的电流波形,波形畸变严重。表2为三种控制方法下输出电压的谐波畸变率,可以看出自适应滑模控制相比PI控制和普通滑模控制在非线性负载电流扰动的情况下,具有更强的鲁棒性。
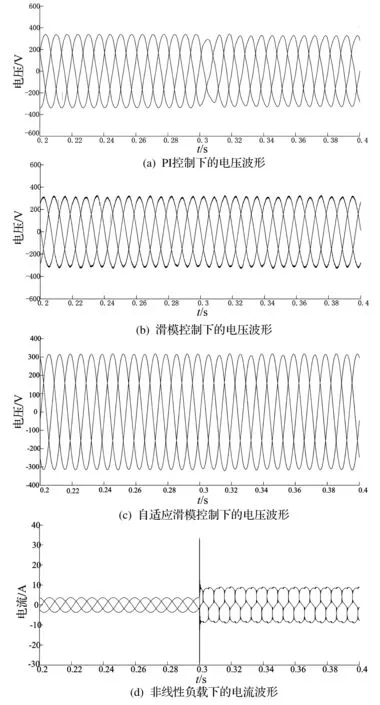
图4 非线性负载下的控制性能
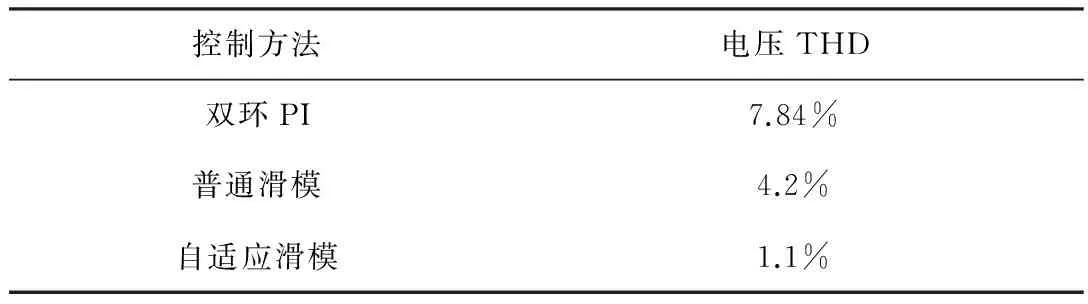
控制方法电压THD双环PI7.84%普通滑模4.2%自适应滑模1.1%
2.2 不平衡负载
初始情况下,系统带三相平衡线性负载,在0.3 s突增三相线性不平衡负载,图5(a)为PI双环控制下的电压波形,可以看出0.3 s后电压波形三相幅值不相等;图5(b)为普通滑模控制下的电压波形,可以看出输出电压抖振比较明显;图5(c)为自适应滑模控制下的电压波形,输出电压波形平滑且幅值不变。图5(d)为自适应滑模控制下的负载电流波形,严重不平衡。可以看出自适应滑模控制相比普通滑模控制和PI控制在不平衡负载电流扰动的情况下,具有更强的鲁棒性。

图5 不平衡负载下的控制性能
2.3 双微网并联
将与上文中同参数的两个微网进行并联,微网2中逆变器的滤波电感在微网1的基础上增加10%,由图6(a)可以看出PI控制下微网间环流较大,一般需要增加虚拟阻抗环节来限制环流;图6(b)采用普通滑模控制,环流有明显下降;图6(c)采用自适应滑模控制,环流进一步下降,可以看出自适应滑模控制对滤波参数摄动具有很强的鲁棒性。
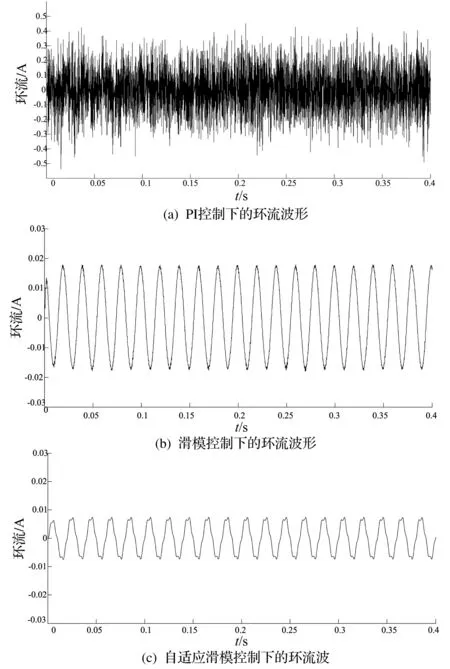
图6 双微网并联下的控制性能
3 结束语
文章阐述了微网逆变系统在VSG下的数学模型,基于此模型,在普通滑模控制的基础上,设计了一种自适应滑模电压控制器。通过与典型PI双环控制以及普通滑模控制进行对比仿真,理论分析和仿真结果表明:(1)普通滑模控制相比PI控制对外部干扰鲁棒性较强,但输出电压抖振大,自适应滑模控制能够利用自适应补偿项有效降低普通滑模输出电压抖振;(2) 在不平衡和非线性负载电流扰动下,自适应滑模控制的鲁棒性更强,能够更好的跟踪VSG下的参考电压信号,输出平衡度高和谐波低的三相电压波形;(3)面对微网的滤波器参数摄动问题,自适应滑模控制具有良好的抗参数摄动能力,微网之间的环流更小。
[1] ZHONG Q C, NGUYEN P L, MA Z, et al. Self-synchronized synchronverters: inverters without a dedicated synchronization unit[J]. IEEE Transactions on Power Electronics, 2014, 29(2):617-630.
[2] 郑天文, 陈来军, 陈天一, 等. 虚拟同步发电机技术及展望[J]. 电力系统自动化, 2015,39(21):165-175.
[3] 吕志鹏, 盛万兴, 钟庆昌, 等. 虚拟同步发电机及其在微电网中的应用[J]. 中国电机工程学报, 2014,51(16):2591-2603.
[4] 朱鑫, 刘俊勇, 刘洋,等. 基于滑模变结构的含不平衡负荷微电网控制策略研究[J]. 电力系统保护与控制, 2015, 43(6):25-32.
[5] 霍群海, 孔力, 唐西胜. 微源逆变器不平衡非线性混合负载的控制[J]. 中国电机工程学报, 2010,47(15):10-15.
[6] 石荣亮, 张兴, 刘芳, 等. 不平衡与非线性混合负载下的虚拟同步发电机控制策略[J]. 中国电机工程学报, 2016,53(4):1-10.
[7] 周念成,池源,王强钢. 含非线性及不平衡负荷的微电网控制策略[J]. 电力系统自动化,2011,35(9):61-66.
[8] 李明娟, 黄泳均, 郝瑞祥,等. 含不平衡负载的微电网并网逆变器控制研究[J]. 电源学报, 2009,8(3):203-207.
[9] MOHAMED A R I, RADWAN A A. Hierarchical control system for robust microgrid operation and seamless mode transfer in active distribution systems[J]. IEEE Transactions on Smart Grid, 2011,2(2):352-362.
[10] 王奔,黄崇鑫,李泰,等. 统一潮流控制器逆系统方法控制策略[J]. 控制理论与应用,2010,27(5):551-556.
[11] 高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
[12] OUCHERIAH S, GUO L. PWM-based adaptive sliding-mode control for boost DC-DC converters[J]. IEEE Transactions on Industrial Electronics, 2013, 60(8):3291-3294.
[13] 王修岩, 杨森. 单相逆变器的滑模自适应控制器设计[J]. 电气传动, 2015, 45(6):56-60.
An Adaptive Sliding Mode Control Strategy for the Virtual Synchronous Generator of the Micro-grid
Li Peng1, Wang Ben1, Zhao Sichen2
(1.College of Electrical Engineering, Southwest Jiaotong University, Chengdu Sichuan 610031, China;2.Reactor Engineering Research Institute, Nuclear Power Institute of China, Chengdu Sichuan 610031, China)
10.3969/j.issn.1000-3886.2017.03.026
TM464
A
1000-3886(2017)03-0086-04
定稿日期: 2016-10-18
李鹏(1992-),男,湖北孝感人,硕士生,研究方向为微电网与新能源发电技术、滑模变结构控制。 王奔(1960-),男,湖南长沙人,教授,博士,研究方向为研究方向为电力系统非线性和变结构控制。
猜你喜欢
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
通信电源技术(2016年6期)2016-04-20 06:21:15
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2014年12期)2014-04-04 12:10:18
