共轴双旋翼飞行器的建模与仿真
2017-09-30 02:58:17沈阳理工大学自动化与电气工程学院暴庆攀郝永平
电子世界 2017年18期
沈阳理工大学自动化与电气工程学院 暴庆攀 王 玲 郝永平
共轴双旋翼飞行器的建模与仿真
沈阳理工大学自动化与电气工程学院 暴庆攀 王 玲 郝永平
主要讨论了共轴双旋翼飞行器的结构组成。通过假设以及部分简化建立了悬停状态动力学分析模型。对标准PID进行改进,用滑动滤波的方法对建立的模型进行研究,并建立滑动滤波PID;最后,在给定参数值的情况下对该飞行器模型进行MATLAB仿真,并且得到了良好的效果。
共轴;PID;MATLAB
0 引言
共轴双旋翼飞行器能够垂直起降,可以自由悬停,适应于不同速度和不同飞行路线的飞行状况。共轴双旋翼飞行器利用内外轴驱动装置为飞行器提供垂直动力实现垂直起落、空中悬停。其两个旋翼成上下分布,上下桨的旋转方向相反,通过对旋翼不同转速的控制就能实现飞行器上升、下降的控制,并最终实现飞行器运动的控制。
1 共轴双旋翼的结构及优点
1.1 共轴双旋翼的外形结构
共轴双旋翼飞行器是在立体结构上具有两个对称分布的电机和两个对称分布的舵机,分为上下两个旋转方向相反的桨,且两个桨和电机的连接通过内外两个轴的共轴推进UMAV,其结构如图1所示。

图1 共轴双旋翼的外形结构
从该飞行器结构模型可以看出,桨叶为上下两部分,所对应的电机为内外两轴。通过改变电机的旋转速度,会使飞行器产生升力,引起运动。因此,通过改变2个电机的转动速度,我们可以控制飞行器的垂直起降运动。如果控制单个舵机的旋转角度,会引起滚转运动,分别产生翻滚和俯仰运动;要使飞行器产生偏航运动,则需要通过共同控制两个舵机的旋转角度。
1.2 共轴双旋翼的优点
共轴双旋翼飞行器除了具有一般无人机的隐蔽性好、造价低廉、操作灵活、起降简单等优点之外,它的特殊结构还使其具有以下优点。
(1)飞行器体积小,所占空间小,适合多平台、多空间的应用。可以在地面、军舰上灵活垂直起降,无须借助其他装置进行发射。
(2)具有非常好的机动性,能够快速、灵活地进行各个方向的运动,进而大大缩小旋回半径,节省时间,提高效率。
(3)结构简单,易于控制,且能执行各种特殊、危险任务。
2 可悬停共轴双旋翼微型飞行器飞行动力学建模
实现飞行运动控制的基础是共轴双旋翼飞行器悬停的稳定。为了进行对平台稳定悬停机理研究,以下要对共轴双旋翼飞行器建模进行分析。
机体六自由度运动力学方程建立在机体轴系上,体轴系原点位于机体重心,轴 X 和轴 Z 在机体的对称平面内,轴 X 沿机体纵轴指向前方,轴 Z 垂直轴 X 向下,轴 Y 与轴 X 和轴 Z 构成右手系。
在建立机体动力学方程时,对机体作如下假设:
(1)可悬停双旋翼微型飞行器是刚体,且飞行质量恒定;
(2)忽略地球曲率,取地面坐标系O-XYZ为惯性坐标系;
(3)重力加速度不随飞行高度变化。
基于上述假设,在机体轴系下建立机体质心运动方程为:

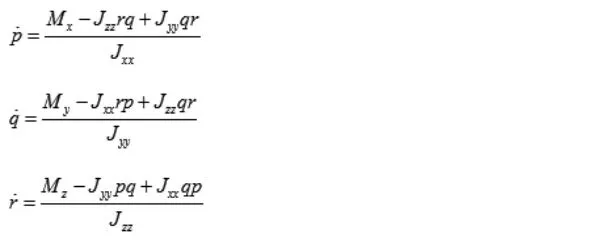
式中m是全机质量,Jxx,Jyy,Jzz是机体质量对机体坐标系各轴的惯性力。Fx,Fy,Fz分别为共轴双旋翼飞行器空气动力在各个轴的分量,Mx,My,Mz分别是翻滚、俯仰和航向合力矩;u,v,w是机体质心速度在机体轴系X,Y,Z轴的投影,p,q,r为机体角速度在机体轴系上的投影,他们是翻滚角速度,俯仰角速度,航向角速度。
机体空间位置和机体速度之间的关系可由机体坐标下的运动速度经转化到地面坐标下的运动速度得到:

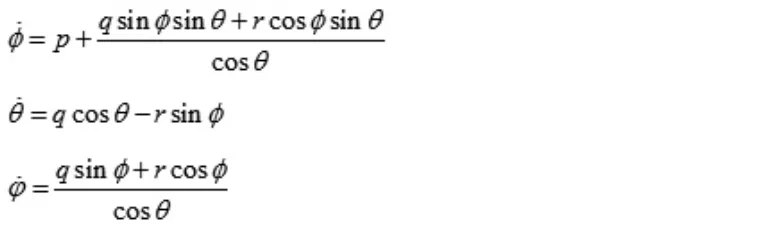
机体角速度和姿态角之间的关系如下:
由于空气的阻力,机身受到的水平方向的阻力:

机体垂直方向所受的阻力:

Sx,Sy,Sz分别是沿着机体坐标系x,y,z轴各自轴的阻力面的面积。
根据飞行动力学理论,旋翼受推力和阻力。旋翼所受推力为:

同样,旋翼所受阻力与旋翼的旋转速度之间的关系也可用上述简化公式来表达:

在共轴双旋翼的气动力模型中,由力和力矩得机体的气动力表达式:
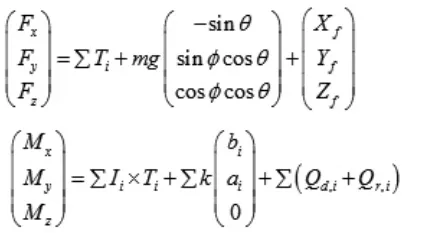
其中,式子中各项为:
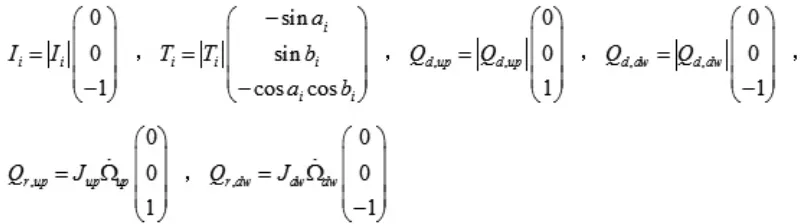
上式中Ii代表Iup(双旋翼飞行器的重心到上桨毂之间的矢量位移)、Idw(双旋翼飞行器的重心到下桨毂之间的矢量位移);Ti是上下旋翼转动所产生的推力,k是常量弹力系数;Qd,up和Qd,dw是旋翼旋转所产生的阻力矩;Qr,up、Qr,dw是旋翼旋转速度变化所产生的反作用力矩。ai是倾斜面的纵向滚角,bi是倾斜面的横向滚角;Jup、Jdw是上桨(带平衡棒)和下桨轴旋转时的惯性力;
3 仿真
要实现共轴双旋翼飞行器的稳定,常规的做法是采用PID等自适应控制算法来实现飞行器姿态的控制[3][4]。由于标准PID效果不是太理想,故对标准PID进行改进,采用滑动平均值滤波。滑动平均值滤波:依次存放N次采样值,每采进一个新数据,就将最早采集的那个数据丢掉,然后求包含新值在内的N个数据的算术平均值或加权平均值。

图2 X轴方向翻滚角的变化
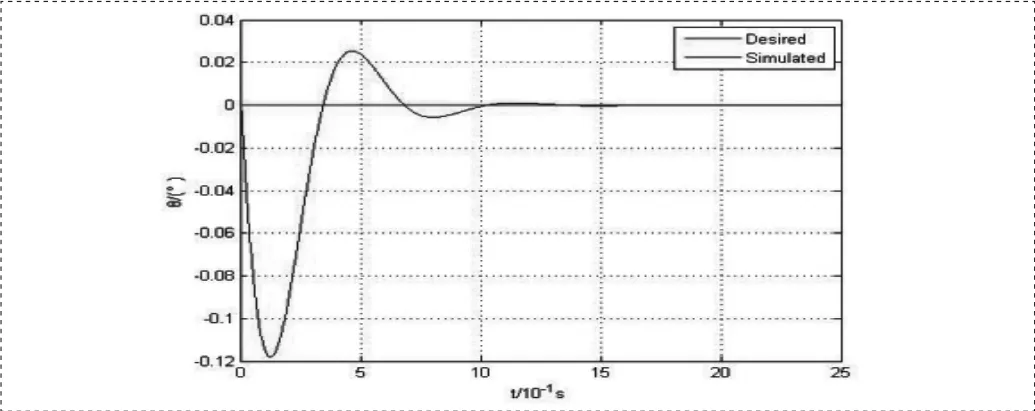
图3 Y轴方向俯仰角的变化

图4 Z轴方向航向角的变化
4 总结
本文以共轴双旋翼飞行器为研究对象,建立了共轴双旋翼飞行器的数学模型,以标准PID理论为基础,进行改进,采用滑动平均值滤波进行PID的控制,并进行了仿真。从仿真结果看,系统呈稳定状态,沿三轴方向的翻滚角,俯仰角,航向角都能够快速趋于期望值并稳定,并且取得了较好的控制精度,仿真结果验证了设计的滑动滤波PID 的有效性。
[1]张天光,王秀楞,王丽霞,等.捷联惯性导航技术[M].北京:国防工业出版社,2007:33.
[2]钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2006:29-36.
[3]符冰,方宗德,等.一种新型微旋翼飞行器的设计与控制[J].航空制造技术,2006(5).
[4]T.Hamel,R.Mahony,R.Lozano,J.Ostrowski.Dynamic modelling and configuration for an X4-flyer.In:Proc. of IFAC World Congress.Barcelona,Spain,2002.
暴庆攀(1990—),河南濮阳人,硕士,现就读于沈阳理工大学。
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:24
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
电子制作(2019年9期)2019-05-30 09:41:48
北京航空航天大学学报(2018年1期)2018-04-20 06:38:10
北京航空航天大学学报(2017年7期)2017-11-24 05:27:08
北京航空航天大学学报(2017年10期)2017-04-20 08:51:25
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
舰船科学技术(2016年1期)2016-02-27 15:39:19